1 Long-term image-based motion estimation Dennis Strelow

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Long-term image-based motion estimation
Dennis Strelow

2
Problems (1)
micro air vehicle (MAV) navigation
AeroVironment Black Widow AeroVironment Microbat

3
Problems (2)
mars rover navigation
Mars Exploration Rovers (MER) Hyperion

4
Problems (3)
robotic search and rescue
RhexCenter for Robot-Assisted Search and Rescue, U. of South Florida

5
Problems (4)
NASA ISS personal satellite assistant

6
Problems (5)
Each of these problems requires:
six degree of freedom motion
in unknown environments
without GPS or other absolute positioning
over the long term
…and some of the problems require:
small, light, and cheap sensors

7
Existing mage-based approaches (1)
Monocular image-based motion estimation is a good candidate given these requirements
In particular, simultaneous estimation of:
multiframe motion
sparse scene structure
is the most promising approach

8
Existing image-based approaches (2)
Algorithms exist to estimate camera motion and sparse scene structure:
SVD-based factorization (1992)
Bundle adjustment (1950’s)
Kalman filtering (1990)
Variable state dimension filter (~1994)

9
Existing image-based approaches (3)
Hotel sequence here

10
Existing image-based approaches (4)
These often generate good results:

11
Sensitivity of motion estimation (4)
But the resulting estimates can be very sensitive to:
incorrect or insufficient image feature tracking
camera modeling and calibration errors
poor prior assumptions on the motion
poor approximations in error modeling
outlier detection thresholds

12
Sensitivity of motion estimation (5)
REL sequence here

13
Sensitivity of motion estimation (6)

14
Long-term motion estimation (1)
For applications like micro air vehicles…
…the situation is really desperate

15
Long-term motion estimation (2)
Each tracked point is only visible in a small percentage of the image sequence
(Example video here of going over the wall)

16
Long-term motion estimation (3)
So, we’re no longer estimating our motion with respect to a single point…
…the motion estimation essentially becomes integration, just as in odometry

17
Long-term motion estimation (4)
But, harder than odometry:
odometry measurements are direct measurements of the incremental motion
whereas, as we’ve seen:
sparse image measurements can produce very poor estimates of the incremental motion

18
Long-term motion estimation (5)
And since we’re essentially integrating incremental motions:
one gross error in the estimated motion finishes you
one mild qualitative error may quickly compound into a gross error, finishing you

19
Long-term motion estimation (5)
And since we’re essentially integrating incremental motions:
one gross error in the estimated motion finishes you
one mild qualitative error may quickly compound into a gross error, finishing you
Even with no gross or “mild qualitative” errors the integrated motion will always drift

20
Approach (1)
Two areas:
improved 6 DOF estimates
improved tracking

21
Approach (2)
most of our work has been on improved 6 DOF estimates

22
Improved 6 DOF estimates (1)
Batch estimation:
uses all of the observations at once
all observations must be available before computation begins
Online estimation:
observations are incorporated as they arrive
many reasons why the filter’s prior distribution might be inaccurate

23
Improved 6 DOF estimates (2)
Image measurements only
often the only option
Image and inertial measurements
can disambiguate image-only estimates
more calibration, unknowns

24
Improved 6 DOF estimates (3)
Conventional images:
most common case
Omnidirectional images:
requires a more complex projection model, additional calibration
generally better motion

25
Improved tracking (1)
For long-term image-based motion estimation, high-quality feature tracking is critical
A. Robustness to harsh overall motion
B. Robustness to poor image texture
C. Uniform image coverage
D. Squeeze every feature for all it’s worth
26
Improved tracking (2)
A. Robustness to harsh image motion
large overall image motions
highly discontinuous 2D motion fields from nonplanar scenes

27
Improved tracking (3)
B. Robustness to poor image texture
low texture
repetitive texture
one-dimensional texture

28
Improved tracking (4)
C. Uniform image coverage
features should span the entire image
features that have become clumped together are redundant

29
Improved tracking (5)
D. Squeeze every feature for all it’s worth
features should be tracked:
despite changes in appearance due to:
even if they are near the image boundary
distance
relative angle
specularities

30
Improved tracking (6)
smalls correlation image feature tracker
Picture of l.s. here

31
Improved tracking (7)
Leonard Smalls smalls
tracker and lone biker of the apocalypse
correlation tracker
especially hard on the little things
safe for use with the little things
mama didn’t love him not applicable
all the powers of hell at his command
maybe in 2.0

32
Improved tracking (8)
Eliminates the heuristics normally used for…
handling large motions
determining when a point has:
extracting features
been mistracked
become occluded
left the image

33
Improved tracking (9)
…and instead:
constrains tracking to epipolar lines
uses only 3D geometric consistency for determining when a point has:
chooses features based on image coverage
been mistracked
become occluded
left the image

34
Improved tracking (10)
smalls uses…
SIFT keypoint extraction and matching
RANSAC
two-frame SFM
…to determine…
consistent matches between the images

35
Improved tracking (11)
…and thence:
epipolar geometry
center of search range along epipolar lines

36
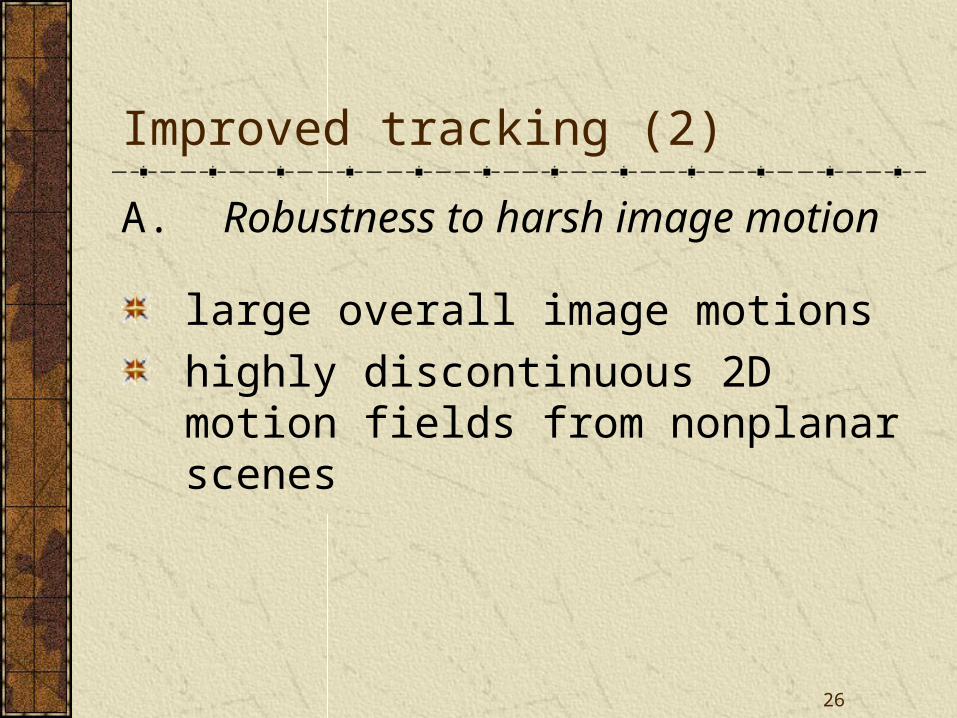
Hyperion (1)

37
Hyperion (2)

38
Hyperion (3)

39
Hyperion (4)

40
Hyperion (4)
41
Hyperion (5)

42
Hyperion (6)

43
Experiments (7): CMU crane
Crane capable of translating a platform…
…through x, y, z…
…through a workspace of about 10 x 10 x 5 m

44
Experiments (8): CMU crane, cont.
y tr
ansl
atio
n (m
eter
s)
x translation (meters)3.00.0-3.0
-3.0
0.0
3.0
(x, y) translation ground truth
45
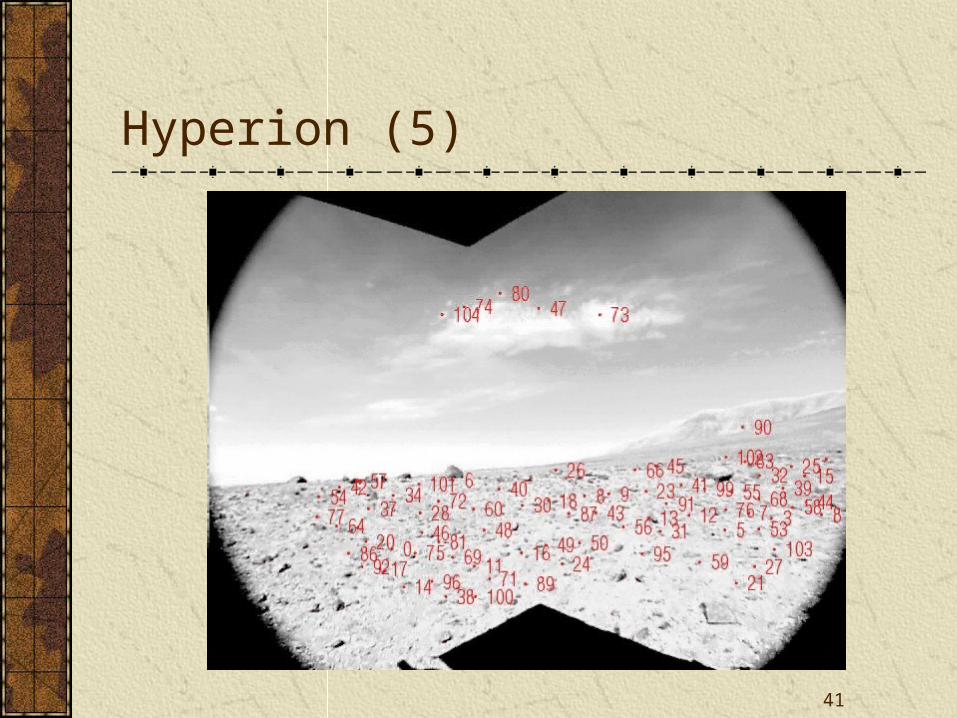
Experiments (9): CMU crane, cont.z
(m)
time
3.5
4.5
z translation ground truth
No change in rotation

46
Experiments (10): CMU crane, cont.

47
Experiments (11): CMU crane, cont.
Hard sequence:
• Each image contains an average of 56.0 points
• Each point appears in an average of 62.3 images (4.4% of sequence)
• Image-and-inertial online algorithm applied
• 40 images used in batch initialization

48
Experiments (12): CMU crane, cont.

49
Experiments (13): CMU crane, cont.
Estimated z camera translations

50
Experiments (14): CMU crane, cont.
6 DOF errors, after scaled rigid alignment:
Rotation: 0.14 radians average
Translation: 31.5 cm average (0.9% of distance traveled)
Global scale error: -3.4%

51
Future work (1)
Closing the loop to deal with drift:
(1) recognizing revisited features
(2) exploiting revisited features in the estimation

52
Related Documents