Історія розвитку комп'ютерів. 1. Основні етапи розвитку комп'ютерів 2. Механічні калькулятори 3. Перший механічний комп'ютер 4. Електронні комп'ютери 5. Перехід до транзисторів 6. Інтегральні схеми 1. Основні етапи розвитку комп'ютерів Нижче перераховані події, які тим або іншим чином вплинули на розвиток комп'ютерної техніки. 1617 рік. Джон Непер (John Napier) створив дерев'яну машину для виконання найпростіших обчислень. 1642 рік. Блез Паскаль (Blaise Pascal) описав машину для підсумовування чисел. 1822 рік. Чарльз Баббадж (Charles Babbage) представив механічний пристрій, названий пізніше аналітичною машиною, яку можна вважати першою справжньою обчислювальною машиною. 1906 рік. Лі Ді Форест (Lee DeForest) запатентував вакуумний тріод, що використовувався як перемикач у перших електронних комп'ютерах. 1943 рік. Англієць Алан Тюрінг (Alan Turing) розробляє Colossus, секретний спеціалізований комп'ютер, призначений для розшифровки перехоплених повідомлень німецьких військ. 1945 рік. Джон фон Нейман (John Von Neumann) написав статтю First Draft of а Reporton the EDVAC, в якій розглядалася архітектура сучасних программіруємих комп'ютерів. 1946 рік. Джоном Мошлі (John Mauchly) і Дж. Преспером Екертом (J. Presper Eckert) створена електронно-обчислювальна машина ENIAC. 1947 рік. 23 грудня Джоном Бардіном (John Bardeen), Уолтером Браттейном (WalterBrattain) і Уїльямом Шоклі (William Shockley) був успішно протестований перший транзистор, що зробив переворот в напівпровідниковій техніці. 1949 рік. У Кембріджському університеті Моріс Вілкес (Maurice Wilkes) створив перший практичний програмований комп'ютер EDS АС. 1953 рік. Компанія IBM створила перший електронний комп'ютер 701. 1955 рік. Компанія Bell Laboratories анонсувала перший транзисторний комп'ютер TRADIC. 1956 рік. У Массачусетському технологічному інституті створений перший багатоцільовий транзисторний програмований комп'ютер ТХ-0. 1956 рік. З появою моделі IBM 305 RAM АС починається ера пристроїв магнітного зберігання даних. 1958 рік. Джек Килбі (Jack Kilby), співробітник компанії Texas Instruments, створює першу інтегральну схему, що складається з транзисторів і конденсаторів на одній напівпровідниковій пластині. 1959 рік. Роберт Нойс (Robert Noyce) — компанії Fairchild Camera і Instrument Corp. — створює інтегральну схему, розташовуючи сполучні канали безпосередньо на кремнієвій пластині. 1964 рік. IBM анонсувала сімейство комп'ютерів System/360 (шість сумісних модифікацій і 40 периферійних пристроїв). 1970 рік. Вперше в світі здійснений зв'язок між двома комп'ютерами; перші чотири вузла мережі ARPAnet — університет Каліфорнії, UCLA, SRI International і університет штату Юту. 1977 рік. У лабораторії IBM в Сан-Хосе створена 8-дюймова дискета. 1

001 Istorija Rozvytku Eom
Nov 07, 2014
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Історія розвитку комп'ютерів.1. Основні етапи розвитку комп'ютерів2. Механічні калькулятори3. Перший механічний комп'ютер4. Електронні комп'ютери5. Перехід до транзисторів6. Інтегральні схеми
1. Основні етапи розвитку комп'ютерівНижче перераховані події, які тим або іншим чином вплинули на розвиток комп'ютерної техніки. 1617 рік. Джон Непер (John Napier) створив дерев'яну машину для виконання найпростіших обчислень. 1642 рік. Блез Паскаль (Blaise Pascal) описав машину для підсумовування чисел. 1822 рік. Чарльз Баббадж (Charles Babbage) представив механічний пристрій, названий
пізніше аналітичною машиною, яку можна вважати першою справжньоюобчислювальною машиною.
1906 рік. Лі Ді Форест (Lee DeForest) запатентував вакуумний тріод, що використовувався як перемикач у перших електронних комп'ютерах.
1943 рік. Англієць Алан Тюрінг (Alan Turing) розробляє Colossus, секретний спеціалізований комп'ютер, призначений для розшифровки перехоплених повідомлень німецьких військ.
1945 рік. Джон фон Нейман (John Von Neumann) написав статтю First Draft of а Reporton the EDVAC, в якій розглядалася архітектура сучасних программіруємих комп'ютерів.
1946 рік. Джоном Мошлі (John Mauchly) і Дж. Преспером Екертом (J. Presper Eckert)створена електронно-обчислювальна машина ENIAC.
1947 рік. 23 грудня Джоном Бардіном (John Bardeen), Уолтером Браттейном (WalterBrattain) і Уїльямом Шоклі (William Shockley) був успішно протестований перший транзистор, що зробив переворот в напівпровідниковій техніці.
1949 рік. У Кембріджському університеті Моріс Вілкес (Maurice Wilkes) створив перший практичний програмований комп'ютер EDS АС.
1953 рік. Компанія IBM створила перший електронний комп'ютер 701. 1955 рік. Компанія Bell Laboratories анонсувала перший транзисторний комп'ютер TRADIC. 1956 рік. У Массачусетському технологічному інституті створений перший багатоцільовий
транзисторний програмований комп'ютер ТХ-0. 1956 рік. З появою моделі IBM 305 RAM АС починається ера пристроїв магнітного зберігання даних. 1958 рік. Джек Килбі (Jack Kilby), співробітник компанії Texas Instruments, створює першу інтегральну схему,
що складається з транзисторів і конденсаторів на одній напівпровідниковій пластині. 1959 рік. Роберт Нойс (Robert Noyce) — компанії Fairchild Camera і Instrument Corp. — створює інтегральну
схему, розташовуючи сполучні канали безпосередньо на кремнієвій пластині. 1964 рік. IBM анонсувала сімейство комп'ютерів System/360 (шість сумісних модифікацій і 40 периферійних
пристроїв). 1970 рік. Вперше в світі здійснений зв'язок між двома комп'ютерами; перші чотири вузла мережі ARPAnet —
університет Каліфорнії, UCLA, SRI International і університет штату Юту. 1977 рік. У лабораторії IBM в Сан-Хосе створена 8-дюймова дискета. 1977 рік. У журналі Electronic News вперше з'явилася реклама мікропроцесорів Intel 4004. 1972 рік. Компанія Hewlett-Packard представила систему НР-35 з постійною пам'яттю. 1972 рік. Дебют мікропроцесора Intel 8008. 1972 рік. Стів Возняк (Steve Wozniak) створив "синій ящик" — генератор тональної
частоти, дозволяючий здійснювати безкоштовні телефонні дзвінки. 1973 рік. Роберт Меткалф (Robert Metcalfe) описав метод мережевого з'єднання
Enternet в дослідницькому центрі Лягло Альто фірми Xerox. 1974 рік. У дослідницькому центрі Лягло Альто компанії Xerox створена робоча
станція, як пристрій введення якої використовувалася миша. 1975 рік. У січневому випуску журналу Popular Electronics описаний комп'ютер
Altair 8800, створений на базі процесора Intel 8080. 1976 рік. Стів Возняк (Steve Wozniak) створив одноплатовий комп'ютер Apple I. 1976 рік. Компанією Shugart Associates анонсований перший 5,25-дюймовий гнучкий
диск і дисковод. 1977 рік. Створений комп'ютер Apple II. 1977 рік. Компанія Commodore випустила комп'ютер PET (Personal Electronic Transactor). 1980 рік. Джон Шох (John Shoch) з дослідницького центру Лягло Альто компанії Xerox знайшов першого
комп'ютерного "черв'яка" — невелику програму, яка розповсюджувалася в мережі в пошуку вільних процесорів.
1980 рік. Компанія Seagate Technologies випустила перший жорсткий диск для мікрокомп'ютерів.
1
1980 рік. Розроблений перший оптичний диск, місткість якого в 60 разів перевищувала місткість 5,25-дюймового гнучкого диска.
1987 рік. Адам Осборн (Adam Osborne) випустив перший портативний комп'ютер Osborne I вартістю 1 195 доларів.
1987 рік. IBM випустила свій перший персональний комп'ютер PC. 1987 рік. Компанія Sony анонсувала першу 3,5-дюймову дискету і дисковод. 1983 рік. Компанія Apple випустила комп'ютер Lisa з першим графічним інтерфейсом користувача. 1983 рік. Компанія Compaq Computer Corp. випустила перший клон комп'ютера IBM PC. 1984 рік. Компанія Apple почала випускати перший "приречений" на успіх комп’ютер з графічним
інтерфейсом користувача, який приніс 1,5 млн. доларів тільки за цей рік. 1984 рік. IBM випустила РС-АТ (PC Advanced Technology), швидкодія якого в три рази перевершує раніше
створені моделі. Цей комп'ютер розроблений на базі мікропроцесора Intel 286 і містить 16-розрядну шину ISA. Комп'ютер AT вважається родоначальником всіх сучасних ПК.
1985 рік. Компанією Philips випущений перший музичний компакт-диск і накопичувач CD-ROM. 1986 рік. Компанія Compaq випустила комп'ютер Deskpro 386, в якому вперше був встановлений процесор
Intel 386. 1987 рік. IBM приступила до виробництва комп'ютерів сімейства PS/2, в яких був встановлений 3,5-дюймовий
дисковод і VGA-відеоадаптер. 1988 рік. Компанія Compaq і інші виробники PC-сумісних систем розробили нову, поліпшену архітектуру
комп'ютера. 1988 рік. Роберт Морріс (Robert Morris) створив і запустив свого "черв'яка" в мережу AR-
PAnet; заражено за різними оцінками від 6 до 60 тис. вузлів. 1989 рік. Компанія Intel випускає процесор 486, який містить 1 млн. транзисторів. 1993 рік. Компанія Intel випустила перший процесор Pentium з сімейства Р5. Окрім випуску процесора, Intel
розробила для нього набір мікросхем системної логіки. 1995 рік. Компанія Intel почала продавати процесор Pentium Pro — першого представника сімейства Р6. 1995 рік. Компанія Microsoft представила першу 32-розрядну операційну систему Windows 95. 1997 рік. Компанія Intel випустила процесор Pentium II, побудований на базі Pentium Pro з підтримкою
інструкції ММХ. 1997 рік. Компанія AMD представила процесор Кб, сумісний з Intel P5 (Pentium). 1998 рік. Компанія Microsoft анонсувала нову версію своєї операційної системи Windows 98. 1998 рік. Компанія Intel представила процесор Celeron — дешевшу версію Pentium П. 1999 рік. Компанія AMD представила процесор Athlon. 1999 рік. Компанія Intel випустила процесор Pentium Ш, побудований на базі Pentium II з підтримкою
інструкції SSE (Streaming SIMD Extensions). 2000 рік. Компанія Microsoft випустила ОС Windows Me (Millennium Edition) і Windows 2000. 2000 рік. Компанії Intel і AMD оголосили про випуск процесорів з тактовою частотою 1ГГц. 2000 рік. Компанія AMD представила Duron, дешевшу версію процесора Athlon із зменшеним об'ємом кеш-
пам'яті другого рівня. 2000 рік. Компанія Intel представила Pentium IV, новітній процесор з 32-розрядною архітектурою (IA-32)
сімейства Intel. 2000 рік. Компанія Intel випустила процесор Itanium, перший 64-розрядний (IA-64)
процесор для ПК. 2001 WinXP
Природно, цей список не претендує на повноту. У ньому представлені тільки найзначущіші події, які зробили вирішальний вплив на розвиток комп'ютерної індустрії.
2. Механічні калькуляториОдним з найперших обчислювальних пристроїв є абак, використовуваний вже більше 2000 років. Абак є
дерев'яною рамою, що містить ряд паралельних лозин з камінчиками або кісточками. Існує ряд правил, згідно яким кісточки переміщаються в праву або ліву сторону, таким чином дозволяючи виконувати різні арифметичні операції. (Бухгалтерські рахівниці, наприклад, є далеким родичем абака.)
Перша європейська машина була створена Непером (творцем логарифмів) на початку ХУП століття. Вона могла виконувати операцію множення двох чисел.
У 1642 році Блез Паскаль створив прообраз цифрової обчислювальної машини, що дозволяє проводити операції складання чисел. Машина призначалася батькові Паскаля, який працював складальником податків. Пізніше, в 1671 році, Готфрід Вільгельм фон Лейбніц розробив обчислювальну машину, побудувавши її тільки в 1694 році. Вона дозволяла виконувати операції складання і множення чисел.
Перший комерційний механічний калькулятор був створений Чарльзом Ксавьером Томасом в 1820 році. Це була "досконала" машина — вона виконувала операції складання, віднімання, множення і розподілу.
3. Перший механічний комп'ютерБатьком цього комп'ютера можна по праву назвати Чарльза Баббаджа, професора математики Кембріджського
університету. Ця машина, створена в 1812 році, могла вирішувати поліноміальні рівняння різними методами. Створивши в 1822 році невелику робочу модель свого комп'ютера і продемонструвавши її Британському уряду,
2

Баббадж одержав кошти на подальший розвиток своєї системи. Нова машина була створена в 1823 році. Вона була паровою, повністю автоматичною і навіть роздруковувала результати у вигляді таблиці.
Робота над цим проектом продовжувалася ще 10 років, в 1833 році був створений перший "багатоцільовий" комп'ютер, названий аналітичною машиною. Вона могла оперувати числами з 50 десятковими знаками і зберігала до 1 000 чисел. Вперше в цій машині було реалізоване умовне виконання операцій — прообраз сучасного оператора IF.
Аналітична машина Баббаджа на повну підставу вважається попередником сучасного комп'ютера, оскільки містить всі ключові елементи, з яких складається комп'ютер.
• Пристрій введення даних. У машині Баббаджа був застосований принцип введення даних за допомогою перфокарт, колись використовуваний в ткацьких верстатах на текстильних фабриках.
• Блок управління. Для управління, або програмування обчислювального пристрою використовувався барабан, що містить безліч пластин і штифтів.
• Процесор (або обчислювальний пристрій). Обчислювальна машина заввишки біля 10 футів, що містить в собі сотні осей і декілька тисяч шестерінок.
• Пристрій, що запам'ятовує. Блок, що містить ще більше осей і шестерінок, дозволяючий зберігати в пам'яті до тисячі 50-розрядних чисел.
• Пристрій виводу. Пластини, пов'язані з відповідною друкарською машиною, використувалися для друку одержаних результатів.
На жаль, через недостатню точність механічної обробки шестерінок і механізмів перший потенційний комп'ютер так і не був повністю побудований. Технологічний рівень виробництва того часу був дуже низький.
Цікаво, що ідея використання перфораційних карт, вперше запропонована Баббаджем, втілилася тільки в 1890 році. Того року проводився конкурс на кращий метод табуляції матеріалів перепису США, переможцем якого став службовець бюро перепису Герман Холлеріт (Herman Hollerith), що запропонував ідею перфокарт. Для ручної обробки даних перепису бюро службовцям, потрібно б було цілі роки. Використання ж перфораційних карт дозволило зменшити час табуляції приблизно до шести тижнів. Згодом Холлеріт заснував Tabulating Machine Company, яка через багато років стала відома як IBM.
Одночасно з іншими фірмами IBM розробила цілу серію поліпшених рахунково-перфораційних систем, що містили величезну кількість електромеханічних реле і мікродвигунів. Системи дозволяли автоматично встановлювати певну кількість перфокарт в положення “прочитування", виконувати операції складання, множення і сортування даних, а також виводити результати обчислень на перфораційних картах. Такі рахунково-аналітичні машини дозволяли обробляти від 50 до 250 перфокарт в хвилину, кожна з яких могла містити 80-розрядні числа. Перфораційні карти служили не тільки як засоби введення і виводу, але і як збереженя даних. Впродовж більш ніж 50 років рахунково-перфораційні машини використовувалися для самих різних математичних обчислень і стали основою зародження багатьох комп'ютерних компаній.
4. Електронні комп'ютериФізик Джон В. Атанасов разом з Кліффордом Беррі (Clifford Berry) з 1937 по 1942 рік працювали в університеті
штату Айова над створенням першої цифрової електронно-обчислювальної машини. Комп'ютер Атанасова-Беррі (названий згодом ABC — Atanasoff-Berry Computer) став першою системою, в якій були використані сучасні цифрові комутаційні технології і вакуумні лампи, а також концепції двійкової арифметики і логічних схем. Після довгого судового розгляду федеральний суддя США Ерл Р. Ларсон (Earl R. Larson) анулював 19 жовтня 1973 року патент, раніше виданий Екерту (Eckert) і Мочлі (Mauchly), офіційно визнавши Атанасова за винахідника першого електронного цифрового комп'ютера.
Використання обчислювальної техніки під час другої світової війни послужило серйозним поштовхом для розвитку комп'ютерів. У 1943 році англієць Алан Тюрінг завершив роботу над створенням військового комп'ютера "Колос", використовуваного для розшифровки перехоплених німецьких повідомлень. На жаль, робота Тюрінга не була оцінена по гідності, оскільки таємниці в конструкції "Колоса" протягом ще багатьох років після закінчення війни зберігалися.
Крім розшифровки ворожих кодів, поступово виникла потреба у виконанні балістичних розрахунків і розв’язку інших військових задач. У 1946 році, Джон П. Екерт (John P. Eckert) і Джон В. Мочлі (John W. Mauchly) разом із співробітниками школи електротехніки Мура університету штату Пенсільванія створили першу комплексну електронно-обчислювальну машину для військових цілей. Ця система одержала назву ENIAC (Electrical Numerical Integrator and Calculator). Вона працювала з десятизначними числами і виконувала операції множення з швидкістю близько 300 множень в секунду, знаходячи значення кожного множення в таблиці множення, що зберігається в оперативній пам'яті. Продуктивність цієї системи була приблизно в 1 000 разів вище, ніж у електромеханічних релейних обчислювальних машин попереднього покоління.
У комп'ютері ENIAC використовувалося близько 18 тис. вакуумних ламп, він займав корисну площу, рівну приблизно 167 квадратним метрам і споживав приблизно 180 тис. ват. Для введення і виводу даних використовувалися перфораційні карти, регістри виконували роль суматорів, а також надавали доступ читання/запису до збережених даних.
Виконувані команди, що становлять ту або іншу програму, створювалися за допомогою певної монтажної схеми і перемикачів, які управляли ходом обчислень. По суті, для кожної виконуваної програми доводилося змінювати монтажну схему і розташування перемикачів.
Патент на електронно-обчислювальну машину був спочатку виданий Екерту і Мочлі. Але згодом, як ви вже знаєте, цей патент був анульований і наданий Джону Атанасову, що створив комп'ютер Атанасова-Беррі (ABC).
Дещо раніше, в 1945 році, математик Джон фон Нейман (John von Neumann) довів, що комп'ютер є цілісною фізичною структурою і може ефективно виконувати будь-які обчислення за допомогою відповідного програмного
3

управління без зміни апаратної частини. Іншими словами, програми можна змінювати, не міняючи апаратного забезпечення. Цей принцип став основним і загальноприйнятим правилом для майбутніх поколінь швидкодійних цифрових комп'ютерів.
Перше покоління сучасних програмованих електронно-обчислювальних машин, що використовують описані нововведення, з'явилися в 1947 році. До їх числа увійшли комерційні комп'ютери EDVAC і UNIVAC, в яких вперше використовувався оперативний запам’ятовуючий пристрій (ОЗП), призначений для зберігання даних і модулів програми. Як правило, програмування виконувалося безпосередньо на машинній мові, не дивлячись на те що до середини 50-х років в цій області науки був зроблений великий крок вперед. Символом нової комп'ютерної ери став UNIVAC (Universal Automatic Computer) — перший по-справжньому універсальний буквено-цифровий комп'ютер. Він застосовувався не тільки в наукових або військових, але і в комерційних цілях.
Після появи UNIVAC темпи еволюції комп'ютерів помітно швидшали. У першому поколінні комп'ютерів використовувалися вакуумні лампи, на зміну яким прийшли менші за розмірами і ефективніші транзистори.
5. Перехід до транзисторівСучасний комп'ютер є набором електронних перемикачів, які використовуються як для представлення інформації в
двійковому коді (у вигляді двійкових одиниць — бітів), так і для управління її обробкою. Ці електронні перемикачі можуть знаходитися в двох станах — включено і вимкнено, що дозволяє використовувати їх для зберігання двійкової інформації.
У перших комп'ютерах використовувалися так звані тріоди — вакуумні лампи, винайдені Лі Де Форестом (Lee De Forest) в 1906 році. Тріод складається з трьох основних елементів, розташованих в скляній вакуумній лампі: катода, анода і розділяючої їх сітки. При нагріванні катода зовнішнє джерело живлення випускає електрони, які збираються на аноді. Сітка, розташована у середині лампи, дозволяє управляти потоком електронів. Коли на сітку подається струм негативного потенціалу, електрони відштовхуються від сітки і притягуються катодом; при подачі струму позитивного потенціалу, електрони проходять через сітку і уловлюються анодом. Таким чином, змінюючи значення потенціалу сітки, можна моделювати стан анода включено/выключено.
На жаль, вакуумна лампа як перемикач виявилася малоефективною. Вона споживала багато електроенергії і виділяла велику кількість тепла — вельми істотна проблема для обчислювальних систем того часу. Вакуумні лампи виявилися ненадійними, головним чином через постійний перегрів: у великих системах лампи доводилося міняти кожні дві години або навіть частіше.
Винахід транзистора (або напівпровідника) став однією з найбільш революційних подій епохи персональних комп'ютерів. У 1947 році інженери Bell Laboratory Джон Бардін (John Bardeen) і Уолтер Браттейн (Walter Brattain) винайшли транзистор, який був представлений широкій громадськості в 1948 році. Декілька місяців опісля Уїльям Шоклі (William Shockley), один із співробітників компанії Bell, розробив модель перехідного транзистора. У 1956 році ці учені були удостоєні Нобелівської премії у області фізики. Транзистор, який, по суті, є твердотільним електронним перемикачем, замінив громіздку і незручну вакуумну лампу. Оскільки споживана транзисторами потужність незначна, побудовані на їх основі комп'ютери мали набагато менші розміри і відрізнялися вищою швидкодією і ефективністю.
Транзистори складаються в основному з кремнію і германію, а також добавок певного складу. Провідність матеріалу залежить від складу введених домішок і може бути негативною, тобто N-типу, або позитивної, Р-типу. Матеріал обох типів є провідником, що дозволяє електричному струму вибирати будь-який напрям. Проте при з'єднанні матеріалів різних типів виникає бар'єр, внаслідок чого електричний струм певної полярності тече тільки в одному напрямі. Саме тому такий матеріал називається напівпровідником.
Для створення транзистора матеріали Р- і N-типа слід розмістити "спиною один до одного", тобто помістити пластину одного типу між двома пластинами іншого типу. Якщо матеріал середньої пластини володіє провідністю Р-типу, то транзистор буде позначений як NPN, а якщо N-типу — то як PNP.
У транзисторі NPN одна з пластин N-типу, на яку звичайно подається струм негативного потенціалу, називається емітером. Середня пластина, виконана з матеріалу Р-типу, називається базою. Друга пластина напівпровідника N-типу називається колектором.
Транзистор NPN по своїй структурі схожий на тріодну електронну лампу: емітер є еквівалентом катода, база еквівалентна управляючій сітці, а колектор подібний аноду. Змінюючи потенціал електричного струму, що проходить через базу, можна управляти потоком електронів, що проходить між емітером і колектором.
В порівнянні з електронною лампою транзистор як перемикач володіє набагато більшою ефективністю, маючи при цьому воістину мікроскопічні розміри. Наприклад, останні моделі мікропроцесорів Pentium П і Ш полягають більш ніж з 27 млн. транзисторів!
Перехід з вакуумних електронних ламп на транзистори поклав початок процесу мініатюризації, який продовжується і до цього дня. Сучасні моделі портативних або кишенькових комп'ютерів, що працюють на акумуляторах, мають вищу продуктивність, ніж системи, що займали колись цілі кімнати і споживаючі величезну кількість електроенергії.
6. Інтегральні схемиУ 1959 році співробітники компанії Texas Instruments винайшли інтегральну схему— напівпровідниковий
пристрій, в якому без дротів з'єднується декілька розташованих на одному кристалі транзисторів. У першій інтегральній схемі їх було всього шість. Для порівняння помітимо, що мікропроцесор Pentium Pro складається з 5,5 млн. транзисторів, а інтегрована кеш-пам'ять, вбудована в одну з мікросхем, містить ще 32 млн. транзисторів. Сьогодні в багатьох інтегральних схемах використовується декілька мільйонів транзисторів.Перший мікропроцесор
4
У 1998 році компанія Intel відсвяткувала своє тридцятиліття. Вона була заснована 18 липня 1968 року Робертом Нойсом (Robert Noyce), Гордоном Муром (Gordon Moore) і Ендрю Гроувом (Andrew Grove). Учені поставили цілком певну мету: створити практичну і доступну напівпровідникову пам'ять. Нічого подібного раніше не створювалося, враховуючи той факт, що запам'ятовуючий пристрій на кремнієвих мікросхемах коштував принаймні в 100 разів дорожче звичної для того часу пам'яті на магнітних сердечниках. Вартість напівпровідникової пам'яті досягала одного долара за біт, тоді як запам'ятовуючий пристрій на магнітних сердечниках коштував всього лише біля цента за біт. Ось що сказав Роберт Нойс: "Нам було необхідно зробити лише одне — зменшити вартість в сто разів і тим самим завоювати ринок. Саме цим ми в основному і займалися".
У 1970 році Intel випустила мікросхему пам'яті місткістю 1 Кбіт, набагато перевищивши місткість існуючих у той час мікросхем. (1 Кбіт рівний 1024 бітам, один байт складається з 8 бітів, тобто ця мікросхема могла зберігати всього 128 байт інформації, що за сучасними мірками нікчемно мало.) Створена мікросхема, відома як динамічний оперативний запам'ятовуючий пристрій 1103 (DRAM), стала до кінця наступного року продаваємим напівпровідниковим пристроєм в світі. До цього часу Intel виросла з жменьки ентузіастів в компанію, що полягає більш ніж з 100 службовців.
Японська компанія Busicom звернулася до Intel з проханням розробити набір мікросхем для сімейства високоефективних програмованих калькуляторів. У той далекий час логічні мікросхеми розроблялися безпосередньо для певної задачі або програми. Велика частина мікросхем, що входять в це замовлення, була призначена для виконання строго певного кола задач, тому жодна з них не могла набути широкого поширення.
Первинна конструкція калькулятора компанії Busicom передбачала принаймні 12 мікросхем різних типів. Інженер компанії Intel Тед Хофф (Ted Hoff) відхилював дану концепцію і натомість розробив однокристальний логічний пристрій, одержуючий команди програми з напівпровідникової пам'яті. Цей центральний процесор знаходився під управлінням програми, яка дозволяла адаптувати функції мікросхеми для виконання поступаючих задач. Мікросхема була універсальною за своєю природою, тобто її застосування не обмежувалося калькулятором. Логічні ж модулі інших конструкцій мали тільки одне призначення і строго певний набір вбудованих команд. Нова мікросхема могла прочитувати з пам'яті набір команд, які і використовувалися для управління її функціями. Тед Хофф прагнув розробити обчислювальний пристрій, розміщений в одній мікросхемі і виконуючий самі різні функції залежно від одержуваних команд.
З цією мікросхемою була пов'язана одна проблема: всі права на неї належали виключно компанії Busicom. Тед Хофф і інші розробники розуміли, що дана конструкція має практично необмежене застосування, дозволяючи перетворити "нісенітні" машини в справжні інтелектуальні системи. Вони настояли на тому, щоб Intel викупила права на створену мікросхему. Засновники Intel Гордон Мур і Роберт Нойс всіляко підтримували створення нової мікросхеми, тоді як інші співробітники компанії були стурбовані тим, що це завдасть удару по основному бізнесу Intel — продажу оперативної пам'яті. Кожен мікрокомп'ютер Intel, що складається з чотирьох мікросхем, містив в ті часи по два модулі пам'яті. Ось що сказав колишній комерційний директор Intel: "Спочатку я відносився до цієї архітектури, як до способу вигідної реалізації великої кількості мікросхем пам'яті, і саме в цей напрям ми збиралися вкладати додаткові засоби".
Компанія Intel запропонувала Busicom повернути віддані нею за ліцензію 60 тис. доларів в обмін на право розпоряджатися розробленою мікросхемою. Японська фірма, що знаходилася у важкому фінансовому положенні, згодилася. В цей час ніхто з виробників, рівно як і сама Intel, не змогли повною мірою оцінити важливість цієї події. Як виявилося згодом, саме ця операція визначила майбутнє Intel. У 1971 році з'явився перший 4-розрядний мікрокомп'ютерний набір 4004 (термін мікропроцесор з'явився значно пізніше). Мікросхема розміром з ніготь великого пальця містила 2 300 транзисторів, коштувала 200 доларів і по своїх параметрах була співставна з першою електронно-обчислювальною машиною ENIAC. Як вже наголошувалося, в системі ENIAC, створеній в 1946 році, було близько 18 тис. вакуумних електронних ламп; вона займала 3 000 кубічних футів (85 кубічних метрів). Мікропроцесор 4004 виконував 60 тис. операцій в секунду, що було на той час неймовірним досягненням.
У 1972 році був випущений наступник 4004— 8-розрядний мікропроцесор 8008. А в 1981 році сімейство процесорів Intel поповнилося новою 16-розрядною моделлю 8086 і 8-розрядної 8088. Ці процесори одержали протягом всього лише одного року близько 2 500 нагород за технологічні новини і досягнення у сфері обчислювальних систем. До числа призерів увійшла і одна з розробок компанії IBM, що стала згодом першим персональним комп'ютером.
У 1982 році Intel представила мікропроцесор 286, що містить 134 тис. транзисторів. По ефективності він перевершував інші 16-розрядні процесори того часу приблизно в три рази. Завдяки концепції внутрішньокристальної пам'яті 286 став першим мікропроцесором, сумісним з своїми попередниками. Цей якісно новий мікропроцесор був потім використаний в епохальному комп'ютері PC-AT компанії IBM.
У 1985 році з'явився 32-розрядний процесор Intel 386. Він містив 275 тис. транзисторів і виконував більше 5 млн. операцій в секунду (Million Instruction Per Second — MIPS). Комп'ютер DESKPRO 386 компанії Compaq був першим персональним комп'ютером, створеним на базі нового мікропроцесора.
Наступним з сімейства Intel став процесор 486, що з'явився в 1989 році. Він містив вже 1,2 млн. транзисторів і перший вбудований співпроцесор. Він працював в 50 разів швидше за процесор 4004, і його продуктивність була еквівалентна продуктивності могутніх мейнфреймів.
У 1993 році Intel представила перший процесор Pentium, продуктивність якого виросла в п'ять разів в порівнянні з сімейством Intel 486. Pentium містив 3,1 млн. транзисторів і виконував до 90 млн. операцій в секунду, що приблизно в 1 500 разів перевищувало швидкодію процесора 4004.
Процесор сімейства Р6, званий Pentium Pro, з'явився на світ в 1995 році. Він містив 5,5 млн. транзисторів і був першим процесором, кеш-пам'ять другого рівня якого була розміщена прямо на кристалі, що дозволяло значно підвищити швидкодію. Навіть у наш час процесор Pentium Pro, що виконує до 300 млн. команд в секунду, все ще використовується для багатопроцесорних серверів і високоефективних робочих станцій.
5
Компанія Intel переглянула архітектуру Р6 (Pentium Pro) і в травні 1997 року представила процесор Pentium II. Він містить 7,5 млн. транзисторів, упаковані, на відміну від традиційного процесора, в картрідж, що дозволило розмістити кеш-пам'ять L2 безпосередньо в модулі процесора. У квітні 1998 року сімейство Pentium II поповнилося дешевим процесором Celeron, використовуваним в домашніх ПК, і професійним процесором Pentium II Хеоп, призначеним для серверів і робочих станцій. У 1999 році Intel випустила процесор Pentium III, який був, по суті, Pentium II, що містить інструкції SSE (Streaming SIMD Extensions).
Тоді як процесор Pentium стрімко займав домінуюче положення на ринку, компанія AMD придбала компанію NexGen, що працювала над процесором Nx686. Результатом злиття компаній з'явився процесор AMD К6. Цей процесор як в апаратному, так і програмному відношенні був сумісний з процесором Pentium, тобто встановлювався в гніздо Socket 7 і виконував ті ж програми. Компанія AMD продовжила розробку швидших версій процесора К6 і завоювала значну частину ринку ПК середнього класу.
У 1999 році AMD представила процесор Athlon, який склав гідну конкуренцію процесорам Intel на ринку професійних комп'ютерів.
Наступний, 2000-й рік ознаменувався появою на ринку нових розробок цих компаній. Так, наприклад, AMD вперше представила процесори Athlon Thunderbird і Duron. Процесор Duron, розроблений для дешевших систем, по суті, ідентичний процесору Athlon і відрізняється від нього тільки меншим об'ємом кеш-пам'яті другого рівня; Thunderbird, у свою чергу, використовує інтегровану кеш-пам'ять, що дозволяє значно підвищити його швидкодію.
Компанія Intel в 2000 році представила Pentium IV, новітній процесор з сімейства IA-32. Компанія також анонсувала процесор Itanium (кодове ім'я Merced), який став першим представником 64-розрядних процесорів Intel (LA-64). Завдяки цьому процесору в недалекому майбутньому з'являться абсолютно нові операційні системи і програмиІ, які, проте, будуть сумісні з 32-розрядним програмним забезпеченням.
У 2000 році відбулася ще одна знаменна подія, що має історичне значення: компанії Intel і AMD перетнули бар'єр в 1 ГГц, який до того часу багато чим здавався непереборним.
6

Народження персонального комп'ютераУ 1973 році були розроблені перші мікропроцесорні комплекти на основі мікропроцесора 8008.
Правда, вони годилися хіба що для демонстрації своїх можливостей і включення індикаторів. В кінці 1973 року Intel випустила мікропроцесор 8080, швидкодія якого була в 10 разів вище, ніж у 8008, і який міг адресувати пам'ять об'ємом до 64 Кбайт. Це стало поштовхом до промислового виробництва ПК.
У 1975 році фотографія комплекту Altair компанії MITS була поміщена на обкладинку січневого номера журналу Popular Electronic. Цей комплект, який можна вважати першим ПК, складався з процесора 8080, блоку живлення, лицьової панелі з безліччю індикаторів і пристрою місткістю, що запам'ятовує, 256 байт (не кілобайт!). Вартість комплекту складала 395 доларів, і покупець повинен був сам зібрати комп'ютер. Цей ПК був побудований по схемі з відкритою шиною (роз'ємами), що дозволяло іншим фірмам розробляти додаткову платню і периферійне устаткування. Поява нового процесора стимулювала розробку різного програмного забезпечення, включаючи операційну систему СР/М (Control Program for Microprocessors) і першу мову програмування BASIC (Beginners All-purpose Symbolic Instruction Code) компанії Microsoft.
У тому ж 1975 році IBM вперше випустила пристрій, який можна було б назвати персональним комп'ютером. Модель 5100 мала пам'ять місткістю 16 Кбайт, вбудований дисплей на 16 рядків по 64 символи, інтерпретатор мови BASIC і касетний накопичувач DC-300. Проте вартість комп'ютера (9 000 доларів) для рядового покупця виявилася дуже високою, особливо якщо врахувати, що безліч любителів (названих пізніше хакерами) пропонували власні комплекти всього за 500 доларів. Очевидно, що ПК компанії IBM не могли витримати такій конкуренції на ринку і продавалися дуже погано.
До появи відомого зараз IBM PC (модель 5150) були розроблені моделі 5110 і 5120. Хоча ці комп'ютери і передували IBM PC, вони не мали з ним нічого спільного. IBM PC був більше схожий на випущену в 1980 році для застосування в офісах модель System/23 DataMaster.
У 1976 році нова компанія, Apple Computer, вийшла на ринок з комп'ютером Apple I вартістю 666 доларів. Його системна платня була пригвинчена до шматка фанери, а корпусу і блоку живлення не було взагалі. Було випущено всього декілька екземплярів цього комп'ютера, які згодом продавалися колекціонерам за 20 тис. доларів. Але комп'ютер Apple П, що з'явився в 1977 році, став прообразом більшості подальших моделей, включаючи і IBM PC.
До 1980 року на ринку мікрокомп'ютерів домінували дві базові моделі комп'ютерних систем. Це був Apple П, що мав безліч зраджених користувачів і гігантську кількість програм, і декілька інших моделей, що походили від комплекту Altair. Ці комп'ютери були сумісні, мали одну операційну систему (СР/М) і стандартні роз'єми розширення з шиною S-100 (по 100 контактів на роз'єм). Всі вони збиралися різними компаніями і продавалися під різними назвами. Але в більшості випадків ними використовувалися однакові програмні і апаратні частини. Цікаво відзначити, що жоден комп'ютер не був сумісний ні з одним з двох основних сучасних стандартів ПК — ні з IBM, ні з Травні.
Новий конкурент, що з'явився на горизонті, дав можливість визначити чинники майбутнього успіху персонального комп'ютера: відкрита архітектура, слоти розширення, збірна конструкція, підтримка апаратного і програмного забезпечення різних компаній. Конкурентом, як ні дивно, виявився комп'ютер компанії IBM, що дотепер займалася тільки могутніми виробничими мейнфреймами. Цей комп'ютер, по суті, нагадував ранню версію Apple, тоді як системи Apple придбавали риси, більш відповідні для IBM. Відкрита архітектура IBM PC і закрита архітектура комп'ютерів Macintosh виробили справжній переворот в комп'ютерній індустрії.
Персональний комп'ютер компанії IBMВ кінці 1980 року IBM нарешті вирішила вийти на ринок дешевих, що стрімко розвивається,
ПК. Для розробки нового комп'ютера вона заснувала в місті Бока-Ратон (шт. Флоріда) своє відділення Entry Systems Division. Невелику групу з 12 чоловік очолив Дон Естрідж (Don Estridge), а головним конструктором був Люіс Еггебрехт (Lewis Eggebrecht). Саме ця група і розробила перший справжній IBM PC. (IBM рахувала модель 5100, розроблену в 1975 році, інтелектуальним програмованим терміналом, а не справжнім комп'ютером, хоча, по суті, це був справжній
7

комп'ютер.) Майже всі інженери групи раніше працювали над проектом комп'ютера System/23 DataMaster, тому він фактично виявився прообразом IBM PC.
Багато що в конструкції IBM PC було запозичене від DataMaster. Так, наприклад, розкладка і електрична схема клавіатури були скопійовані з DataMaster; правда, в IBM PC дисплей і клавіатура були автономні, на відміну від DataMaster, де вони об'єднувалися в один пристрій (що було незручне).
Були запозичені і деякі інші компоненти, включаючи системну шину (роз'єми вводу-виводу), причому використовувалися не тільки ті ж самі 62-контактні роз'єми, але і розводка контактів. У IBM PC застосовувалися ті ж контроллери переривань і прямого доступу до пам'яті, що і в DataMaster. При цьому платню розширення, розроблені для DataMaster, можна було використовувати і в IBM PC.
Проте в DataMaster застосовувався процесор 8085 компанії Intel, який міг адресувати всього 64 Кбайт пам'яті і мав 8-розрядні внутрішню і зовнішню шини даних. Через ці обмеження в IBM PC використовувався процесор 8088, який мав адресний простір 1 Мбайт, 16-розрядну внутрішню шину даних, але зовнішня шина даних була 8-розрядною. Завдяки 8-розрядній зовнішній шині даних і аналогічній системі команд можна було використовувати пристрої, розроблені раніше для DataMaster.
На цьому, як ви розумієте, справа не зупинилася. Були вивчені потреби ринку, враховані всі існуючі на той час стандарти, з'ясовані причини їх успіху, що дозволило розробникам вбудувати в IBM PC можливості практично всіх популярних тоді систем. Параметри комп'ютера фактично визначалися споживачами, тому IBM вдалося створити пристрій, який ідеально заповнив відведену йому на ринку нішу.
IBM створила комп'ютер менш ніж за рік, максимально упровадивши в нього розробки, що були, і компоненти інших виробників. Групі Entry Systems Division була надана більша незалежність, ніж іншим підрозділам: їм було дозволено використовувати послуги і продукцію інших фірм в обхід бюрократичного правила, приписуючого використовувати в розробках тільки вироби IBM. Наприклад, мови програмування і операційну систему для IBM PC розробляла Microsoft.ЗауваженняЦікаво, що IBM спочатку звернулася до Digital Research, творцю операційної системи СР/М, але ті не зацікавилися цією пропозицією. Тоді за справу узялася Microsoft, яка пізніше перетворилася на найбільшу в світі компанію — виготівника програмних продуктів. IBM фактично запропонувала їм співробітничати і підтримати новий комп'ютер.
12 серпня 1981 року з народженням IBM PC в світі мікрокомп'ютерної індустрії з'явився новий стандарт. З тих пір були продані сотні мільйонів PC-сумісних комп'ютерів, а на його основі виросло величезне сімейство комп'ютерів і периферійних пристроїв. Програмного забезпечення для цього сімейства створене більше, ніж для будь-якої іншої системи.
20 років опісляПісля появи першого IBM PC пройшло більше 20 років, і за цей час, звичайно, багато що
змінилося. Наприклад, IBM-сумісні комп'ютери, що раніше використовують процесор 8088 з тактовою частотою 4,77 Мгц, тепер на основі процесора Pentium П працюють з тактовою частотою 500 Мгц і вище, швидкодія сучасних систем виросла більш ніж в 4 000 (!) разів (мається на увазі загальна продуктивність, а не тільки тактова частота). Перший IBM PC мав два односторонні накопичувачі на гнучких дисках місткістю 160 Кбайт і використовував операційну систему DOS 1.0, а сучасні комп'ютери працюють з жорсткими дисками місткістю в 20 Гбайт і вище.
У комп'ютерній індустрії продуктивність процесора і місткість дискових накопичувачів подвоюються, як правило, 2-3 щороку (цей закон носить ім'я одного із засновників Intel Гордона Мура).
Слід зазначити ще один важливий момент: IBM перестала бути єдиним виробником PC-сумісних комп'ютерів. Звичайно, IBM розробила і продовжує розробляти стандарти, яким повинні відповідати сумісні комп'ютери, але вона вже не є монополістом на ринку. Часто нові стандарти для ПК розробляють інші компанії. Сьогодні Intel розробляє більшість стандартів апаратного забезпечення, а Microsoft — програмного. Оскільки їх продукти домінують на ринку ПК, самі персональні комп'ютери часто називають Wintel. Саме ці компанії розробили стандарти шини PCI (Peripheral Component Interconnect), AGP (Accelerated Graphics Port), формфактори системної плати ATX і NLX, кубла Socket 1-8, Slot 1, Slot 2, Socket 370 і багато чого іншого. Windows фактично стала стандартом операційної системи для PC-сумісних комп'ютерів.
Сотні компаній випускають PC-сумісні комп'ютери, крім того, відомі тисячі виробників електронних компонентів. Все це сприяє як розширенню ринку, так і поліпшенню споживацьких якостей PC-сумісних комп'ютерів.
PC-сумісні комп'ютери так широко поширені не тільки тому, що сумісну апаратуру легко збирати, але і тому, що операційні системи поставляє не IBM, а інші компанії, наприклад Microsoft. Ядром програмного забезпечення комп'ютера є BIOS (Basic Input Output System), вироблювана різними компаніями (наприклад, Phoenix, AMI і ін.). Багато виробників
8

ліцензіюють програмне забезпечення BIOS і операційні системи, пропонуючи свої сумісні комп'ютери. Увібравши в себе все краще, що було в системах СР/М і UNIX, DOS стала доступною для більшості існуючих програмних продуктів. Успіх Windows привів до того, що розробники програм все частіше стали створювати свої продукти для PC-сумісних комп'ютерів.
Системи Macintosh компанії Apple ніколи не користувалися таким успіхом, як PC-сумісні моделі. Це пов'язано з тим, що Apple сама розпоряджається всім програмним забезпеченням і не надає його іншим фірмам для використовування в сумісних комп'ютерах. З погляду користувачів, PC-сумісні комп'ютери набагато зручніші за всіх інших. Конкуренція між виробниками привела до того, що за ті ж гроші, вкладені в покупку, ви дістаєте доступ до набагато різноманітніших програмних і додаткових апаратних засобів.
Сьогодні ринок PC-сумісних комп'ютерів продовжує розвиватися. При розробці нових моделей використовуються все більш довершені технології. Оскільки ці типи комп'ютерних систем використовують найрізноманітніше програмне забезпечення, мабуть, протягом найближчих 15-20 років домінувати на ринку будуть PC-сумісні комп'ютери.Закон МураУ 1965 році Гордон Мур в ході підготовки доповіді про перспективи розвитку комп'ютерної пам'яті знайшов цікаву особливість: ємність кожної нової мікросхеми пам'яті подвоюється в порівнянні з її попередницею, а сама нова мікросхема з'являється кожні 18-24 місяці. Побудувавши лінію тренда, Мур відзначив, що продуктивність комп'ютерів збільшуватиметься експоненціально за часом. Цю залежність стали називати законом Мура. До речі, цей закон описує не тільки зростання місткості оперативної пам'яті, він часто використовується для визначення ступеня зростання швидкодії процесорів і місткості жорстких дисків. За 26 років кількість транзисторів процесора збільшилася в 3 200 разів: від 2,3 тис. в процесорі 4004 до 7,5 млн. в Pentium II.
Що нас чекає в майбутньому? Тут логічніше було б привести числові дані (наприклад, до 2011 року Intel випустить процесор з 1 млрд транзисторів, тактовою частотою 10 ГГц, виготовлений за 0,07-мікронною технологією і здатний виконувати 100 млрд операцій в секунду), але з упевненістю можна сказати лише одне: комп'ютери будуть швидшими, менше і дешевше.
Хто визначає стандарти в індустрії програмного забезпечення для PC
Коли я ставлю це питання на семінарах, багато не замислюючись відповідають: "Microsoft!". Вважаю, немає ніяких підстав не погоджуватися з такою відповіддю. Поза сумнівом, сьогодні Microsoft утримує контроль над розробкою операційних систем, використовуваних на PC; адже спочатку в більшості PC використовувалася MS DOS і Windows 3.1, а зараз — Windows 95/98, Windows NT або Windows 2000. Контроль над розробкою операційних систем Microsoft використовувала як важіль, що дозволяє контролювати розробку іншихтипів програмного забезпечення PC (наприклад, утиліт і додатків). Так, багато утиліт (такі, як кешування диска, стиснення дисків, дефрагментація, калькулятори і записники), які спочатку пропонувалися незалежними компаніями, тепер включене в Windows. Microsoft навіть вбудувала в операційну систему Web-броузер, що не на жарт налякало конкурентів, що створюють аналогічні програми. Тісніша інтеграція програмного забезпечення для роботи з мережами і пакетів програм-додатків з операційною системою дозволила Microsoft ще більше підсилити контроль над операційними системами в порівнянні з іншими компаніями. Саме тому Microsoft тепер домінує на ринку програмного забезпечення для PC, пропонуючи різноманітні програми — від текстових процесорів до електронних таблиць і систем управління базами даних.
Коли з'явилися перші PC, IBM контролювала стандарти апаратних засобів PC; і саме вона привернула Microsoft для розробки більшої частини програмного забезпечення для PC. IBM розробляла апаратні засоби, записувала BIOS (Basic Input Output System — базова система вводу-виводу) і привертала Microsoft для розробки DOS (Disk Operating System — дискова операційна система) і декількох інших програм і пакетів для IBM. Проте вона не зуміла забезпечити собі виняткові права на DOS, надавши Microsoft право продавати код MS DOS, розроблений для IBM, будь-якої іншої зацікавленої компанії. Саме ця помилка в договорі перетворила Microsoft на домінуючу компанію на ринку програмного забезпечення, і саме через цю помилку згодом IBM втратила контроль над тим самим стандартом PC, який вона створила.
Причина втрати контролю IBM над цим стандартом полягає у тому, що програмне забезпечення можна захистити авторськими правами, тоді як авторські права на апаратні засоби можуть бути захищені тільки відповідно до патентів, що пов'язано з труднощами і вимагає значного часу (причому термін дії патенту закінчується через 17 років). Крім того, для отримання патенту вимагається, щоб розроблена апаратура була унікальною і новою, а IBM в своїх розробках PC спиралася на раніше існуючі елементи, які міг придбати будь-який радіоаматор. Фактично найважливіші елементи для першого PC були розроблені Intel, наприклад процесор 8088, генератор синхронізуючих імпульсів 8284, таймер 8253/54, контроллер переривань 8259, контроллер прямого доступу до пам'яті 8237, периферійний інтерфейс 8255 і контроллер шини 8288. Ці мікросхеми складали основу першого PC.
Оскільки проект першого PC не можна було запатентувати, будь-яка компанія могла дублювати апаратні засоби IBM PC. Потрібно було лише придбати ті ж самі чипи, що і IBM, у тих же виробників і постачальників і розробити нову системну платню з аналогічною схемою. Щоб допомогти в цьому, IBM навіть видала повний набір схем своєї системної плати і всієї плати адаптерів в дуже деталізованому і досяжному технічному керівництві. У мене є декілька цього першого керівництва IBM, і я все ще заглядаю в них час від часу, коли хочу дізнатися що-небудь про особливості PC на рівні елементів.
Найважче було скопіювати програмне забезпечення (мається на увазі програмне забезпечення IBM PC), яке було захищене відповідно до закону про авторське право. Phoenix Software — одна з перших фірм, що розробили законні методи рішення цієї проблеми: виявляється, відповідно до
9

закону можна розробити (але не скопіювати!) програми, які функціонально дублюють програмне забезпечення, таке, як базова система вводу-виводу (BIOS). Були створені дві групи інженерів по розробці програмного забезпечення, причому особливо ретельно стежили, щоб до другої групи входили фахівці, які ніколи раніше не бачили код BIOS, розроблений IBM. Перша група досліджувала базову систему вводу-виводу, розроблену IBM, і повний опис BIOS. Друга читала опис, складений першою групою, і навмисно із самого початку кодувала нову базову систему вводу-виводу, яка робила все те, що було описане в складеній специфікації. Кінцевим результатом стала нова базова система вводу-виводу, написана із самого початку з кодом, хоча і не ідентичним коду IBM, але що мав точно такі ж функціональні можливості.
Компанія Phoenix назвала це підходом clean room, і цей підхід дозволяє виходити з будь-якого допустимого положення. Оскільки первинна базова система вводу-виводу IBM PC містила тільки 8 Кбайт коду і мала обмежену функціональну нагоду, дублювання її за допомогою вказаного підходу не складало особливих труднощів. У міру зміни базової системи вводу-виводу IBM інші компанії, що розробляли базові системи вводу-виводу, знайшли, що відносно нескладно своєчасно вносити зміни, відповідні змінам IBM. Команди тесту POST (Power-On Self Test), що є частиною базової системи вводу-виводу, в більшості базових систем вводу-виводу навіть зараз займають приблизно 32 Кбайт. Сьогодні не тільки Phoenix, але і такі компанії, як Award, AMI і Microid Research, розробляють програмне забезпечення базової системи вводу-виводу для виробників комп'ютерів PC.
Після дублювання апаратних засобів і базової системи вводу-виводу IBM PC залишилося тільки відтворити DOS, щоб повністю відтворити систему, сумісну з IBM. Проте задача проектування DOS "з нуля" була набагато складнішою, тому що DOS значно перевершує базову систему вводу-виводу і містить набагато більше програм і функції. Крім того, операційна система розвивалася і змінювалася частіше, ніж базова система вводу-виводу. Це означає, що єдиний спосіб одержати DOS для IBM-сумісного комп'ютера полягав в отриманні прав на його використовування. Ось тут і з'явилася Microsoft. Як ви пам'ятаєте, IBM не зажадала від Microsoft підписати виняткову ліцензійну угоду, що дозволяло цій компанії продавати DOS будь-якому користувачу. Завдяки ліцензії на копіювання MS DOS вдалося подолати останню перешкоду на шляху створення IBM-сумісних комп'ютерів, які тепер можна було виробляти незалежно від бажання IBM.
Тепер ми розуміємо, чому немає ніяких клонів або аналогів системи Macintosh Apple. He тому, що комп'ютери Травні не можна продублювати; апаратні засоби Травні досить прості і їх легко відтворити, використовуючи наявні у наявності деталі. Реальна проблема полягає у тому, що Apple володіє MAC OS і не дозволяє ніякої іншої компанії продавати Apple-сумісні системи. Крім того, базова система вводу-виводу і OS вельми істотно інтегровані в Травні; ця базова система вводу-виводу дуже велика, складна і, по суті, є частиною операційної системи. Тому метод clean room практично не дозволяє продублювати ні базову систему вводу-виводу, ні операційну систему.
Але в 1996-1997 рр. Apple ліцензіювала базову систему вводу-виводу і операційну систему, що дозволило таким компаніям, як Sony, Power Computing, Radius і навіть Motorola, почати випуск недорогих Apple-сумісних систем. Поява щодо недорогих Apple-сумісних комп'ютерів стала згубно впливати на розвиток і доходи Apple, яка негайно зупинила дію ліцензій. Тепер при модернізації комп'ютера Macintosh комплектуючі можна придбати тільки у Apple по досить високим цінам, так що модернізація системи стає невигідною.
Оскільки IBM не володіла винятковим (воно належало також і Microsoft) правом на DOS або Windows, будь-який користувач, що бажав встановити на комп'ютері ці операційні системи, міг одержати дозвіл від Microsoft. Це дозволяло будь-якій компанії, що бажала розробити IBM-сумісний комп'ютер, в обхід IBM (подобалося це їй чи ні) виробляти функціонально ідентичну машину. Коли одна компанія контролює ринок операційних систем, вона природним чином контролює ринок всього програмного забезпечення, що працює під управлінням тієї або іншої операційної системи, включаючи всілякі драйвери і прикладні програми. І поки PC використовуватимуться з операційними системами компанії Microsoft, вона контролюватиме ринок програмного забезпечення для PC.
Хто контролює ринок апаратних засобів PCЗасвоївши, що Microsoft контролює ринок програмного забезпечення для PC, оскільки вона
одержала права на операційну систему PC, спробуємо розібратися, що можна сказати про апаратні засоби. Неважко встановити, що IBM мала контроль над стандартом апаратних засобів PC до 1987 року. Саме IBM розробила основний проект системної плати PC, архітектуру шини розширення (8/16-разрядная шин ISA), послідовний і паралельний порти, відеоадаптери стандартів VGA і XGA, інтерфейс гнучких і жорстких дисків, контроллери, блок живлення, інтерфейс клавіатури, інтерфейс миші і навіть фізичні формфактори всіх пристроїв — від системної плати до плати розширення, джерел живлення і системного блоку. Розроблені IBM до 1987 року, вони все ще продовжують впливати на можливості сучасних систем.
Найважливішим є питання про те, яка компанія відповідальна за створення і винахід нових проектів апаратних засобів PC, інтерфейсів і стандартів. Але, як правило, одержати точну відповідь не вдається: деякі указують на Microsoft (але ця компанія контролює ринок програмного забезпечення, а не апаратних засобів), деякі називають Compaq або декілька інших крупних виробників комп'ютерів і лише небагато дають правильну відповідь — Intel.
10

Цілком зрозуміло, чому багато хто не відразу уловлює суть питання: адже я питаю, хто фактично володіє Intel PC. Причому я маю на увазі не тільки ті комп'ютери, на яких є наклейка Intel inside (адже це відноситься лише до систем, що мають процесор Intel), але і системи, розроблені і зібрані за допомогою комплектуючих Intel або навіть придбані через цю компанію. Ви можете зі мною не згодитися, але я переконаний, що більшість користувачів сьогодні має Intel PC!
Звичайно, це не означає, що вони придбали свої системи у Intel, оскільки відомо, що ця компанія не продає повністю зібраних PC. В даний час ви не можете ні замовити системний блок у Intel, ні придбати комп'ютер марки Intel у кого б те ні було. Я веду мову про системну платню. На мою думку, зі всіх складових найважливіша — системна платня, і тому її виробник повинен бути визнаний законним виробником вашої системи.
Найкрупніші фірми — складальники комп'ютерів розробили власну системну платню. Відповідно до матеріалів журналу Computer Reseller News трьома найкрупнішими виробниками настільних комп'ютерів останніми роками є Compaq, Packard Bell і БЗМ. Ці компанії розробляють і виробляють власну системну платню, а також багато інших компонентів системи. Вони навіть розробляють чипи і компоненти системної логіки для власної плати. Хоча ринок збуту цих трьох компаній великий, є ще крупніший сегмент ринку, який можна назвати ринком компаній другого рівня.
Другий рівень займають компанії, які насправді не виробляють системи, а збирають їх, тобто придбавають системну платню, корпуси, джерела живлення, дисководи, периферійні пристрої і ін., збирають комп'ютери і продають їх як готові вироби. Сьогодні Dell, Gateway і Micron — одні з найкрупніших складальників систем в світі, але, крім них, можна перерахувати ще сотні. В даний час це найбільший сегмент на ринку PC. Звичайно, за винятком украй окремих випадків, можна придбати ту ж саму системну платню і інші компоненти, використовувані цими виробниками, але їх роздрібна ціна, поза сумнівом, буде вищим. Можна навіть самостійно зібрати фактично ідентичну систему із самого початку, але це — тема розділу 23, "Збірка і модернізація комп'ютера".
Зверніть увагу на той факт, що цілий ряд компаній другого рівня має неймовірно високий об'єм продажів, наприклад Dell займає майже рівне положення з Compaq, яка утримує перше місце по збуту ПК вже протягом багатьох років. Компанія Gateway і інші складальники систем лише небагато відстають від лідерів.
Якщо Gateway, Dell, Micron і інші компанії не виробляють власної системної плати, то хто ж це робить? Ви вгадали — цим займається Intel. He тільки названі компанії використовують виключно системну платню Intel, але більшість комп'ютерів на ринку другого рівня зібрана на основі цієї системної плати. Я буквально тільки що проглянув огляд десяти комп'ютерів з мікропроцесором Pentium П в черговому номері журналу Computer Shopper, і — повірте, я не жартую — вісім з десяти систем, які оцінювалися в цьому огляді, мали системну платню Intel. Точніше, в цих восьми використовувався один і той же тип системної плати Intel, тобто ці системи відрізнялися тільки косметично, деталями зовнішньої збірки, корпусами і тим, які відеоадаптери, дисководи, клавіатури і інше використовував складальник.
Два інші комп'ютери, про яких йшла мова в цьому огляді, хоча і використовували платню інших виробників (не Intel), були розраховані на застосування процесорів Intel Pentium П, і в них були встановлені набори мікросхем системної логіки (чипсети) Intel (їх вартість складає більше 90% вартості системної плати).
Як і коли це трапилося? Звичайно, Intel завжди була домінуючим постачальником процесорів для PC, оскільки IBM вибрала Intel 8088 як центральний процесор в першому IBM PC в 1981 році. Контролюючи ринок процесорів, ця компанія, природно, контролювала і ринок мікросхем, необхідних для установки процесорів в комп'ютери. А це, у свою чергу, дозволило Intel контролювати ринок мікросхем системної логіки. Ця компанія почала їх продавати в 1989 році, коли з'явилася мікросхема системної логіки 82350 EISA (Extended Industry Standard Architecture), і до 1993 року стала найбільшим (за об'ємом) і самим основним постачальником мікросхем системної логіки для системної плати. Але у такому разі, чом би компанії, що виробляє процесор і всі інші чипи, необхідні для системної плати, не усунути всі проміжні ланки і не виробляти системну платню цілком? Такий поворотний момент наступив в 1994 році, коли Intel стала найкрупнішим в світі виробником системної плати. З тих пір ця компанія контролює ринок системної плати: у 1997 році Intel виробила більше системної плати, ніж вісім найкрупніших виробників разом узятих (об'єм збуту перевищив 30 млн. плати, а їх вартість — 3,6 млрд доларів!). Ця платня встановлюється в комп'ютерах PC різними складальниками, тому більшість користувачів тепер купує комп'ютери, по суті, вироблені Intel, і неважливо, хто конкретно загвинчував гвинти в корпусі.
Без сумніву, Intel здійснює контроль над стандартом апаратних засобів PC, тому що вона контролює ринок системної плати PC. Вона не тільки випускає переважну більшість системної плати, використовуваної в даний час в комп'ютерах, але і поставляє переважну більшість процесорів і мікросхем системної логіки для системної плати іншим виробникам. Це означає, що, навіть якщо ваша системна платня фактично виготовлена не Intel, найімовірніше, на ній встановлений процесор Intel або мікросхема системної логіки цієї компанії.
Intel встановила декілька сучасних стандартів апаратних засобів PC, а саме:• PCI (Peripheral Component Interconnect) — інтерфейс локальної шини;
11

• AGP (Accelerated Graphics Port — прискорений графічний порт) — інтерфейс длявисокоефективних відеоадаптерів;
• формфактор АТХ системної плати, який замінює (дещо обридлий) разработанний IBM формфактор Baby-AT, використовуваний з початку 80-х років;
• формфактор системної плати NLX, що замінив дещо специфічний і володіючийрядом недоліків формфактор LPX, використовуваний в багатьох недорогих комп'ютерах;завдяки таким змінам тепер ці комп'ютери теж можна модернізувати;
• DMI (Desktop Management Interface — настільний інтерфейс управління), іспользуємий для виконання функцій управління апаратними засобами системи;
• DPMA (Dynamic Power Management Architecture — динамічна архітектура управління живленням) і АРМ (Advanced Power Management — вдосконалене управління живленням) — стандарти управління енергоспоживанням в PC.
Компанія Intel займає домінуюче положення не тільки в індустрії персональних комп'ютерів, але і в напівпровідниковій промисловості в цілому. Як випливає з діаграми, складеної за матеріалами Cahners Research (мал. 2.1), об'єм продажів компанії Intel майже в три рази перевищує аналогічні параметри її найближчого конкурента.
Кому належить контроль над ринком операційних систем, тому належить контроль і над ринком програмного забезпечення PC, а кому належить контроль над ринком процесорів і, отже, системної плати, тому забезпечений контроль і над ринком апаратних засобів. Оскільки сьогодні, здається, Microsoft і Intel спільно контролюють ринок програмного забезпечення і устаткування PC, недивно, що сучасний PC часто називається системою типа Wintel.
Тема 1.2. Структура ЕОМ.
1. Типи систем2. Компоненти системи
ТИПИ СИСТЕМКласифікувати PC можна класифікувати PC двома способами — по типу програмного
забезпечення, яке вони можуть виконувати, і по типу головної шини системної плати комп'ютера, тобто по типу шини процесора і її розрядності. Оскільки увага концентрується головним чином на апаратних засобах, розглянемо спочатку саме таку класифікацію.
Процесор прочитує дані, що поступають через зовнішню сполучну шину даних процесора, яка безпосередньо сполучена з головною шиною на системній платі. Шина даних процесора (або головна шина) також іноді називається локальною шиною, оскільки вона локальна для процесора, який сполучений безпосередньо з нею. Будь-які інші пристрої, сполучені з головною шиною, по суті, можуть використовуватися так, як при безпосередньому з'єднанні з процесором. Якщо процесор має 32-розрядну шину даних, то головна шина процесора на системній платі також повинна бути 32-розрядною. Це означає, що система може пересилати в процесор або з процесора за один цикл 32 розряди (бита) даних.
У процесорів різних типів розрядність шини даних різна, причому розрядність головної шини процесора на системній платні повинна співпадати з розрядністю встановлюваних процесорів. У табл. 2.1 перераховані всі процесори, що випускаються Intel, і вказана розрядність їх шини даних.Таблиця 2.1. Процесори Intel і розрядність їх шини даних
Процесор Розрядність шини 8088 8 8086 16 286 16 386SX 16 386DX 32 486 (всі моделі) 32 Pentium 64 Pentium MMX 64 Pentium Pro 64 Pentium Celeron/ll/lll
64
12
Pentium ll/lll 64 AMD Duron/Athlon
64 Pentium IV 64
Кажучи про розрядність процесорів, слід звернути увагу на той факт, що, хоча всі процесори Pentium мають 64-розрядну шину даних, розрядність їх внутрішніх регістрів складає тільки 32 біт і вони виконують 32-розрядні команди. Таким чином, в контексті програмного забезпечення всі чипи від 386 до Pentium TTT мають 32-розрядні регістри і виконують 32-розрядні інструкції. Проте, з погляду інженера-електронщика або фізика, розрядність шини даних цих процесорів, що працюють з 32-розрядним програмним забезпеченням, рівна 16 (386SX), 32 (386DX, 486) і 64 (Pentium) розрядам. Розрядність шини даних — головний чинник при проектуванні системної плати і систем пам'яті, оскільки вона визначає, скільки бітів передається в чіп і з чіпа за один цикл.
Процесор Р7, названий Itanium (раніше Merced), передбачає нову 64-розрядну систему команд (IA-64), але як і раніше виконує всі 32-розрядні команди, властиві звичним процессорам— від 386 до Pentium. Ще не відомо, чи буде Itanium мати 64-розрядну шину даних подібно Pentium або ж у нього буде 128-розрядна шина.
З табл. 2.1 витікає, що абсолютно всі процесори Pentium, починаючи від оригінального Pentium, Pentium MMX, Pentium Pro і закінчуючи Pentium ШШ/TV, мають 64-розрядну шину даних.
На основі апаратних засобів можна виділити наступні категорії систем:• 8-розрядні;• 16-розрядні;• 32-розрядні;• 64-розрядні.З погляду розробника, якщо не брати до уваги розрядність шини, архітектура всіх систем — від
16- і до 64-розрядних — в основі своїй практично не змінювалася. Старіші 8-розрядні системи істотно відрізняються. Можна виділити два основні типи систем, або два класи апаратних засобів:
• 8-розрядні системи (клас PC/XT);• 16/32/64-разрядные систем (клас AT).Тут PC — це абревіатура, утворена від personal computer (персональний комп'ютер), XT—
eXTended PC (розширений PC), а AT— advanced technology PC (вдосконалена технологія PC). Терміни PC, XT, і AT узяті з назв первинних систем IBM. Комп'ютер XT — це практично той же комп'ютер PC, але в ньому на додаток до дисковода для гнучких дисків, який використовувався в базисному комп'ютері PC для зберігання інформації, встановлений жорсткий диск. У цих комп'ютерах використовувалися 8-розрядні процесори 8088 і 8-розрядна шина ISA (Industry Standard Architecture — архітектура промислового стандарту) для розширення системи. Шина — ім'я, дане роз'ємам розширення, в які можна встановити додаткову плату. Шина ISA називається 8-розрядною тому, що в системах класу PC/XT через неї можна відправляти або одержувати тільки 8 біт даних за один цикл. Дані в 8-розрядній шині відправляються одночасно по восьми паралельних дротах.
Комп'ютери, в яких розрядність шини рівна 16 або більше, називаються комп'ютерами класу AT, причому слово advanced указує, що їх стандарти вдосконалені в порівнянні з базисним проектом, і ці удосконалення вперше були здійснені в комп'ютері IBM AT. AT — позначення, що застосовувалося IBM для комп'ютерів, в яких використовувалися вдосконалені роз'єми розширення і процесори (спочатку 16-, а пізніше 32- і 64-розрядні). У комп'ютер класу AT можна встановити будь-який процесор, сумісний з Intel 286 або старшою моделлю (включаючи 386, 486, Pentium, Pentium Pro і Pentium II), причому розрядність системної шини повинна бути рівна 16 або більше. При проектуванні систем найважливішим чинником є архітектура системної шини разом з базисною архітектурою пам'яті, реалізацією запитів переривання (Interrupt ReQuest — IRQ), прямого доступу до пам'яті (Direct Memory Access — DMA) і розподілом адрес портів вводу-виводу. Способи розподілу і функціонування цих ресурсів у всіх комп'ютерів класу AT схожі.
У перших комп'ютерах AT використовувався 16-розрядний варіант шини ISA, який розширив можливості первинної 8-розрядної шини, що застосовувалася в комп'ютерах класу PC/XT. З часом для комп'ютерів AT було розроблено декілька версій системної шини і роз'ємів розширення, наприклад:
• 16-розрядна шина ISA;13
• 16/32-разрядная шин EISA (Extended ISA);• 16/32-разрядная PS/2 шина MCA (Micro Channel Architecture);• 16-розрядна шина PCMCIA (Personal Computer Memory Card International Association),
вона ж PC-Card;• 32-розрядна шина PCMCIA, вона ж Cardbus;• 32-розрядна шина VL-Bus (VESA Local Bus);• 32/64-разрядная шин PCI (Peripheral Component Interconnect);• 32-розрядний графічний порт AGP (Accelerated Graphics Port).Комп'ютер з будь-якою із згаданих системних шин за визначенням відноситься до класу AT,
незалежно від того, встановлений в ньому процесор Intel або сумісний з ним процесор. Проте комп'ютери AT з процесором 386 і вище володіють можливостями, яких немає в комп'ютерах AT першого покоління з процесором 286 (маються на увазі можливості адресації пам'яті, її перерозподілу і організації 32- і 64-розрядного доступу до даних). Більшість комп'ютерів з процесором 386DX і вище мають 32-розрядну шину і повною мірою використовують всі її можливості.
Звичайно комп'ютерні системи включають 16-розрядні роз'єми ISA, які забезпечують сумісність з ранніми версіями апаратних компонентів, а також роз'єми PCI для сучасних високоефективних адаптерів. Крім того, більшість портативних систем використовує роз'єми PC-Card і Cardbus безпосередньо в мобільних пристроях і роз'єми ISA і PCI в додаткових базових станціях.
Основні відмінності між стандартами комп'ютерів класів PC/XT і AT приведені в табл. 2.2. Ця інформація відноситься до всіх PC-сумісних моделей.
Визначити 8-розрядний комп'ютер PC/XT найпростіше по 8-розрядних роз'ємах ISA. Який би процесор і інші компоненти не були встановлені в системі, якщо всі роз'єми розширення є 8-розрядними ISA, значить, система відноситься до класу PC/XT. Комп'ютер класу AT можна визначити як IBM-сумісний з 16-розрядними або вище (32/64-разрядными) роз'ємами. Це можуть бути роз'єми ISA EISA, MCA, PC-Card (що називалися раніше PCMCIA), Cardbus, VL-Bus або PCI. Використовуючи цю інформацію, ви зможете правильно визначити клас фактично будь-якої системи, будь то PC/XT або AT. Насправді системи класу PC/XT (8-розрядні) вже багато років не випускаються. Фактично будь-яка сучасна система ґрунтується на проекті класу AT.
КОМПОНЕНТИ СИСТЕМИСучасний PC одночасно і простий і складний. Він став простішим, оскільки за минулі роки
багато компонентів, використовуваних для збірки системи, були інтегровані з іншими компонентами і тому кількість елементів зменшилася. Він став складнішим, оскільки кожна частина сучасної системи виконує набагато більше функцій, ніж в старіших системах.Таблиця 2.2. Відмінності між комп'ютерами класів PC/XT і AT
Параметр комп'ютера Клас PC/XT (8-розрядний)
Клас AT (1 6/32/64-разрадный)
Підтримуваний тип процесора х86илих88 286 або вище Режим процесора Реальний Реальний або захищений
(віртуальний на процесорах 386 і вище)
Підтримуване програмне забезпечення
Тільки 16-розрядне 16- або 32-розрядне
Розрядність шин (роз'ємів) розширення
8 16/32/64
Тип шин Тільки ISA ISA, EISA, MCA, PC-Card, Cardbus, VL-Bus, PCI
Апаратні переривання 8 (використовується 6) 16 (використовується 11) Канали прямого доступу до пам'яті (DMA)
4 (використовується 3) 8 (використовується 7)
Максимальний об'єм ОЗУ 1 Мбайт 16 Мбайт або 4 Гбайт і більше Швидкість передачі даних 250 250/300/500/1 000
14
(швидкодія) контроллера гнучкого диска, Кбіт/с Стандартний завантажувальний накопичувач
360 або 720 Кбайт 1,2/1,44/2,88 Мбайт
Інтерфейс клавіатури Однонаправлений Двонаправлений Стандарт на CMOS-пам’ять/часы
Відсутній Сумісність з МС1 4681 8
Тип послідовних портів UART 8250В 16450/16550А Нижче перераховані всі компоненти, які повинен містити сучасний PC.. Компоненти, необхідні для збірки сучасної системи PC:
• системна платня;• процесор;• пам'ять (оперативна пам'ять);• корпус;• блок живлення;• дисковод для гнучких дисків;• жорсткий диск;• накопичувач CD-ROM, CD-R або DVD-ROM;• клавіатура;• миша;• відеоадаптер;• монітор (дисплей);• звукова платня;• акустичні системи;• модем.Всі компоненти стисло описані в табл. 2.3, а докладніший опис ви знайдете у відповідних
розділах.Таблиця 2.3. Основні компоненти PC
Компонент Опис Системна платня Є центральною частиною системи, до якої підключаються всі апаратні
компоненти ПК; Процесор Це "двигун" комп'ютера, його називають також центральним процесором
або CPU (central processing unit). Оперативна пам'ять
Пам'ять системи часто називається оперативною або пам'яттю з довільним доступом (Random Access Memory- RAM). Це основна пам'ять, в яку записуються всі програми і дані, використовувані процесором під час обробки.
Корпус Це рама або шасі, усередині якої розміщується системна платня, блок живлення, дисководи, платня адаптерів і будь-які інші компоненти системи;
Джерела живлення
Від джерела живлення електрична напруга подається до кожного окремого компоненту PC
Дисковод гнучких дисків
Простий, недорогий і дозволяє використовувати змінний магнітний носій;
Накопичувач на жорстких дисках
Жорсткий диск - найголовніший носій інформації в системі. На ньому зберігаються всі програми і дані, які зараз не знаходяться в оперативній пам'яті.
Накопичувач CD-ROM/ DVD-ROM
Накопичувачі CD-ROM (Compact Disc- компакт-диск) і DVD-ROM (Digital Versatile Disc- цифровий універсальний диск) є пристроями, що запам'ятовують, щодо великої ємності із змінними носіями з оптичним записом інформації;
Клавіатура Це основний пристрій PC, який із самого початку був створений для того, щоб користувач міг управляти системою.
15

Миша З появою операційних систем, в яких використовувався графічний інтерфейс користувача (Graphical User Interface- GUI), виникла необхідність в пристрої, який дозволяв би користувачу указувати або вибирати об'єкти, що відображаються на екрані.
Відеоадаптер Служить для управління відображенням інформації, яку ви бачите на моніторі;
Монітор (дисплей) Модем Цей пристрій використовується для підключення Internet;
16
Системний блок ПК. Корпуси, їх типи і характеристики Блоки живлення, їх типи і характеристики. Роз’єми блоків живлення стандартів АТ
та АТХ
Корпус (case) персонального комп'ютера, як правило містить наступні компоненти: його основа – це рама (1) до якої кріпляться: блок живлення (2), панель кріплення материнської плати (3), передня панель (4), а також секції для дисководів. Секції використовуються двох типів: розміром 5,25” (5) та розміром 3,5” (6). Обидва типи секцій можна використовувати для жорстких дисків. А також кришки. У нових комп'ютерах специфікації ATX їх дві: ліва і права (знімаються вони роздільно), а ось в старіших корпусах кришка всього одна – П–подібна. Рама, панель кріплення материнської плати, корпус блоку живлення, секції накопичувачів – все це виготовляється з алюмінію або дюралюмінію, передня ж, лицьова панель – з пластмаси. Часто зустрічаються корпуси з лицьовими панелями які можуть підлягати мінятися. Слід зазначити той факт, що на сьогоднішній день на ринку вибір корпусів досить широкий. Але в основному існує тільки два типи корпусів: Desktop (настільний, горизонтального розташування) і Tower (вертикального розташування). Слід зазначити, що починають з'явилися desktop’и з вертикальним розташуванням.Desktop. Настільний блок. Як правило такий комп'ютер ставиться на стіл, а монітор зверху. З одного боку це зручно, адже звільняється місце під столом і не потрібно нахиляться для того, що б вставити диск в CD – ROM. Але з другого боку займається більше місця на столі. Тому недавно з'явилися десктопи з можливістю поставити їх горизонтально тобто користувач може вибрати найбільш придатне йому положення блоку. Тільки ось в цьому випадку необхідні спеціальні CD – ROM’и, так як не кожен такий накопичувач зможе завантажити диск в положенні під 90 градусів. Висота десктопів як правило рівна 20 см, ширина і довжина по 45 см, кількість 5,25``секцій 2 – 3, а 3,5`` секцій 1 – 2. В нашій країні корпуси типу Desktop не набули поширення. Зате на Заході такі корпуси набули досить широкого поширення, особливо корпуси випуску середини 90х років.
Slimline. Desktop.Slimline. Цей тип корпусу є Desktop, тільки тонший. Зважаючи на це для таких корпусів були розроблені спеціальний форм–фактор материнських плат. Річ у тому, що висота корпусу не дозволяє встановлювати плати розширення перпендикулярно материнській платі. Тому було винайдено карту адаптерів. На материнській платі знаходиться один загальний роз'єм для підключення карти адаптерів, на якій вже знаходяться роз'єми шин до яких підключаються карти розширення. Таким чином ці карти розташовані паралельно материнській платі. Оскільки корпуси Slimline випускаються, як правило самими виробниками комп'ютерів, які ці корпуси і наповнюють, то карти адаптерів виготовляються спеціально під висоту даного корпусу, що дозволяє виготовити його якомога тонше. До вибору типу корпусу Slimline необхідно відноситися дуже відповідально. Оскільки по-перше, через те, що ці корпуси дуже тонкі, в них можна встановити по одній чи дві 5,25” і 3,5” секції. А це порівняно мало. По-друге через те, що всі деталі такого комп'ютера знаходяться максимально близько один до одного, охолоджування їх може бути недостатнім і як наслідок – виникнення перегрівів. До того ж ціна таких корпусів не мала. Слід зазначити той факт, що комп'ютери типу Slimline одні з найекономічніших, оскільки блоки живлення їх рідко перевищують потужність в 150 Вт. Товщина цього типу блоків приблизно 8 см, ширина – 35 см, довжина – 45 см. На рисунку можна побачити приклад вертикального розташування корпусу типа Slimline.Необхідно відзначити той факт, що межа між Desktop і Slimline дещо розмита. Наприклад, комп'ютер фірми Hewlett–Packard серії VectraVL має висоту 12,5 см, карту адаптера і 4 секції під приводи. Здавалося б для Slimline дещо товстий, а до Desktop – затонкий. Таким чином, можна прийти до висновку: надто тонкі корпуси – це Slimline (до 8 см), всі ж інші – Desktop.
17

Tower. Башти діляться на чотири підтипи, що розрізняються по висоті. У порядку зростання це - мікро (micro), міні (mini), міді (midi, middle - середня) і повна (big, full). Для більшості корпусів "класифікатором" є число великих зовнішніх відсіків, згідно приведеній нижче таблиці (хоча бувають і виключення).
Тип башти Число великих відсіківПовна 4-8Міді 3Міні 2
Мікро 1
Один з найменших представників цього сімейства – Mini – Tower.
Mini - Tower. Midi - Tower.Mini - Tower. Розміри його досягають лише 45(в) х20(ш) х45(д). Якщо покласти Mini – Tower на бік, то отримаємо за розмірами Desktop (існують навіть корпуси, в яких можна вийняти блок з секціями і розвернути його на 90 градусів, що дозволяє використовувати їх і як Mini – Tower і як Desktop). Mini – Tower’ часто ставлять поряд з монітором на стіл. Розміри корпусу дозволяють розмістити в ньому тільки по дві 5,25” і 3,5” секцій. Крім того, скупченість компонентів усередині блоку не дозволяють як слід охолоджувати їх. Можна поставити додатковий кулер, але знову ж таки, через малий внутрішній об'єм, він буде маленьким, а значить і малопродуктивним. З другого боку, з огляду на те, що висота не велика, ці корпуси досить стійкі. Загалом, для слабких по продуктивності комп'ютерів цей тип корпусів відмінно виконує покладені на нього функції. Окрім того , як і Slimline, Mini – Tower досить економічний, оскільки потужність його блоку живлення рідко перевищує 200 Вт. Однак збирати комп'ютер з корпусом Mini – Tower досить не зручно. Місця мало, блок живлення постійно заважає, не зручно ставити жорсткий диск під флоппі – дисководом. Midi – Tower. Цей тип корпусу по суті справи збільшений у висоту Mini – Tower і є найпоширенішим типом, оскільки увібрав в себе найбільшу кількість плюсів. Розміри Midi – Tower: висота приблизно 50 см, ширина – 20 см, а довга – 45 см. Це дозволяє ставити системні блоки як під стіл, так і на нього. Життєвий простір усередині корпусу дозволяє розмістити всередині близько 3 – 4 секцій розміром 5,25” і 2 секції розміром 3,5”. Такі корпуси дозволяють встановити два накопичувачі CD – ROM і два жорстких диски, не кажучи вже про FDD. Слід зазначити і той факт, що більший простір дозволяє потоком повітря краще охолоджувати компоненти комп'ютера. Це значить, що комп'ютер в такому корпусі пропрацює довше, оскільки температурний режим впливає на довговічність і працездатність напівпровідників. До того ж є можливість установки додаткового вентилятора під 3,5” секціями, що дуже не маловажно. Блоки живлення таких корпусів мають велику потужність, близько 250 – 300 Вт, а іноді і 350 Вт. Server. Також є корпуси Server. Ця категорія включає величезну кількість різних дуже специфічних рішень. Серверні корпуси можуть бути розраховані на монтаж їх в стойки, мають велику кількість вентиляторів і місць для їх установки, деякі забезпечуються системами термоконтролю і можливістю установки декількох БЖ. Є і інший клас серверних корпусів: великі Tower, розраховані на звичайну установку (не у стойки), мають велику кількість відсіків для установки пристроїв, декілька блоків живлення. Корпуси обох категорій звичайно мають можливість гарячої заміни компонентів. Корпуси, розраховані на монтаж в стойки, мають стандартизовані габарити. Їх товщина може коливатися від 1 Units (U) до трьох (1U — 3U), допустимі і «нецілі» значення (2.5U, наприклад). Найтонші 1U звичайно розраховані на установку спеціальних, з підвищеною компактністю, комплектуючих. Серед них низькопрофільні радіатори, материнські плати, що мають похилі гнізда для пам'яті і розраховані на установку плати розширення паралель поверхні плати. Існують так само і інші різновиди корпусів, але вони менш поширені.Розташування блоку живлення
Блок живлення в башті розташований як правило у верхній частині корпусу, а нижче за нього розташована системна платня. У достатньо високих корпусах блок живлення розташований повністю над системною платою, так що їх проекції на бічну стінку не перетинаються. Це звичне розташування, "без перекриття".
18

Це особливо зрозуміло, коли блок лежить на полиці (ще буває кріплення просто на гвинтах до задньої стінки).У нижчих корпусах (39 см. і нижче) вказані проекції частково перетинаються, оскільки блок живлення повернений на 90° щодо подовжньої осі. Тому такі корпуси дещо ширші звичних – приблизно 22 см. На системній платі під блоком живлення знаходиться гніздо процесора. Це створює наступні незручності:
процесор закритий блоком живлення і тому для роботи з процесором потрібно спочатку демонтувати блок живлення (або вести роботи усліпу)
блок живлення захаращує місце біля процесора, погіршуючи його обдув з'являється обмеження на висоту перехідної плати для процесорів (сокетний варіант для слотового гнізда).
Щоб обійти це, компанія ASUS випускає спеціальну нізкопрофільну перехідну плату
Очевидно кращі високі корпуси, "без перекриття"Компоненти корпусів.Корпус складається з двох основних компонентів:
Шасі: ідеальна товщина металу - 0,7 і 0,8 міліметрів, велика кількість посадочних місць, додаткові ребра жорсткості, краї завальцовані і виключають можливість порізів, кріплення зручне, панель для материнської плати знімається, блок живлення розташований горизонтально над материнською платою і не обмежує доступ до елементів системного блоку.
Блок живлення - одна з важливих частин корпусу. Він забезпечує надійну роботу всіх внутрішніх систем і пристроїв комп'ютера. При виборі блоку живлення необхідно враховувати деякі критерії:
1. MTFB (mean time before failure - зразковий час до першої неполадки) або MTTF (mean time to failure - теж саме, що і попереднє), як правило повинен бути мінімум 100 тисяч годин.
2. Діапазон зміни вхідної напруги при збереженні стабільної роботи блоку живлення. Для 110В хороший блок живлення повинен витримати від 90 до 130, для 220В - 180 до 270.
3. Піковий струм при включенні. Це значення струму, що проходить по системі у момент ініціалізації блоку живлення. Чим менше, тим краще, оскільки блок живлення не несе такий великий тепловий удар.
4. Час (у мс - мілісекундах) утримання вихідної напруги в межах точно заданих значень після відключення вхідної (20 мс - хороше, 10-15 мс - незадовільний).
5. У хороших БЖ є схема захисту вихідних напруг. Наявність даної схеми - це вже позитивний фактор. 6. Потужність на виходах БЖ на кожному каналі. Параметр означає максимальну суму Ампер яку
здатен згенерувати БЖ без загрози пошкодження.7. Стабілізація напруги при зміні навантаження від "мін" до "мах".8. Відношення поглинання від мережі до виробленої потужності на виході (КПД). Значення, що показує
к-ть енергії яка перетворюється в тепло під час перетворення струму. Вимірюється в %. Чим більше значення ефективності, тим краще.
Основні вимогиОсновними вимогами, які пред'являється до корпусів, є:1. Сумісність з передбачуваним форм-фактором материнської плати і блоком живлення. 2. Відповідність розмірів. Корпус повинен бути достатньо великий для розміщення всіх необхідних пристроїв
— але в той же час достатньо малий, щоб поміститися у відведеному для нього місці. 3. Оптимальність конструкції. Збирання-розбирання повинно відбуватися просто, конструкція корпусу
повинна передбачати вільний доступ до всіх компонентів. 4. Продуманість вентиляції. Схема вентиляції повинна забезпечувати найбільш оптимальне охолоджування
компонентів: застосування задніх витяжних вентиляторів істотно покращує температурний режим; всі задні вентилятори повинні орієнтувати повітряний потік в одну сторону, краще
всього — назовні; застосування втяжних фронтальних вентиляторів для вертикальних корпусів практично
даремне (за рідкісними винятками); використовувати вентилятори діаметром менше 80…100 мм небажано; передні і задні отвори для циркуляції повітря не повинні перекриватися фальш-панелями
і заглушками; дроти і кабелі усередині корпусу повинні бути зібраними, краще всього скрутити їх в
джгути, перев'язати і акуратно укласти так, щоб вони не заважали потоку повітря.
19
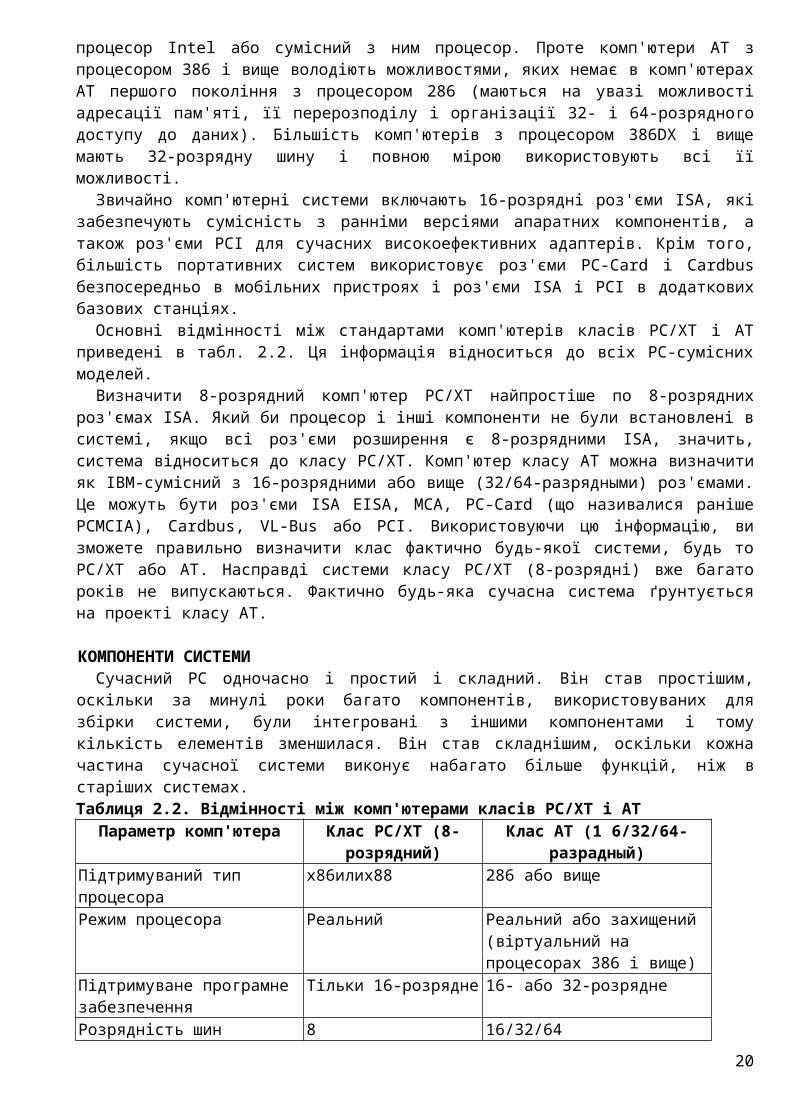
5. Якість виконання. На корпусі не повинно бути гострих кромок; крім того, повинна забезпечуватися необхідна жорсткість кріплень.
Решта параметрів — колір, дизайн і габарити — справа смаку і особистих переваг.ВИБІР КОРПУСУ
Дизайн. Не дивлячись на суб'єктивність, цей параметр дуже важливий, оскільки якщо корпус вам подобається, то мимовільно створює приємну робочу обстановку. Деякі виробники випускають декілька модифікацій корпусів, що мають однакові перераховані вище параметри, але відмінні по дизайну. Прикладом є наявність дверець на лицьовій частині корпусу, розміщення світлових індикаторів, їх форма, колір корпусу і ін. Далі, одному подобається строгі форми, а іншому футуристичні (помітимо, що життя в угасаючі Макінтоші вдихнув багато в чому незвичайний дизайн корпусів iMac з напівпрозорого пластика)
Точність виконання корпусу. Слід перевірити правильність розташування отворів і відсіків під плату, накопичувачі, наскільки добре встановлена плата поєднується з отворами під зовнішні роз'єми, а карти, встановлені в PCI і AGP слоти — з отворами в корпусі для них. Зорієнтуватися можна по цьому малюнку (узято з сайту Intel):
При хорошому корпусі клямка на слоті AGP материнської плати В принципі не потрібна — тільки «криві» корпуси знаходять тенденцію висмикувати карту із слота, і відбувається це саме за рахунок того, що зібраний корпус «гуляє». Проте, дуже багато виробників клямку на слот AGP ставлять. Тобто вони — реалісти :) А ось клямок на слотах PCI мені зустрічати не доводилося, хоча зовсім вже «ліві» корпуси успішно висмикують карти і звідти, особливо при транспортуванні системного блоку.
Густина кріплення кришок і ін. елементів. Все це повинне добре закріплюватися, інакше забезпечений зайвий шум.
Можливість установки великих материнських плат. В деяких випадках «широкі» материнські плати (Full Size ATX) можуть упиратися в Кошики для монтажу накопичувачів формату 5,25", у власне встановлені там пристрої, або в інші елементи корпусу.
Зручність роботи з ним. Сюди відносяться такі параметри, як зручність доступу до основних компонентів ПК, зйомні елементи корпусу (кришки, знімні відсіки під вінчестери, кріплення БЖ, що допускають їх демонтаж назовні, що особливо актуальне в корпусах, де БЖ розташований з перекриттям), а також відсутність гострих необроблених кромок.
20

Жорсткість конструкції. Зрозуміло, що хороший корпус не повинен гойдатися, а повинен мати жорстку і міцну конструкцію.
Можливості розширення, шум і ін. Таким чином, вибираючи noname-корпус, закручуємо його на всі болти ззаду, одягаємо бічні стінки і легенько стукаємо по них. Почуєте характерний брязкіт — не віримо завіренням, що «вставите плату — все буде ОК», краще навряд чи буде. Теж саме відноситься і до нестійкості при натисненні на корпус зверху / управо / вліво, — корпус повинен і без нутрощів бути стійкою несучою конструкцією, а не скріплятися, наприклад, за рахунок CD-ROM.
Призначення і функції БЖ. Блок живлення виконує функції перетворювача напруги, що перетворює стандартні 220 В побутової електромережі в напруги, необхідні для роботи комп'ютера. Компоненти ПК живляться від строго певних номіналів напруг, всяке відхилення від яких може викликати некоректну роботу, збій або просто вихід з ладу чутливих до скачків напруги компонентів комп'ютера. Блок живлення повинен забезпечувати стабільність шести напруг: +12 В, +5 В, +3,3 В, —5 В, —12 В і +5 В чергового режиму (з похибкою 5% для додатніх і 10% для від’ємних; —5 В, —12 В для живлення використовуються рідко).Будова блоку живлення така, що при роботі створюються великі перешкоди. Для нейтралізації перешкод БЖ екранується, оснащується фільтрами. Більшість БЖ включає ще і механізми захисту (мережеві фільтри) від короткочасних зовнішніх стрибків напруги в мережі живлення, що виникають, наприклад, при ударі блискавки. Все частіше зустрічаються БЖ з схемою корекції фактору потужності — PFC (Power Factor Correction). Крім того, блок живлення, як будь-який перетворювач, не володіє 100% ККД, і частина електроенергії безповоротно перетворюється на теплову. Надмірний нагрів може пошкодити елементи блоку, їм просто необхідне охолоджування. Більшість блоків живлення оснащується активною системою охолоджування, але останнім часом все більше розповсюдження одержує пасивне охолоджування — без вентилятора. Така система не шумить, але ефективність охолоджування при цьому знижується. Отже, хороший блок живлення повинен генерувати стабільну напругу, бути потужним, не дуже сильно нагріватися при роботі і видавати мало шуму.Стандарти БЖ. Роз'єми блоків живлення ATСистемна плата промислового стандарту PC, XT, AT, Baby-AT і LPX використовує один і той же тип роз'ємів блоку живлення. Для підключення системної плати використовуються два 6-контактні роз'єми живлення (Р8 иР9) формфактора AT/LPX.
При підключенні роз'ємів Р8 і Р9 до системної плати завжди слідуйте правилу: суміщайте чорні дроти так, як показано на наступному малюнку. Деякі виробники корпусів і блоків живлення роблять спеціальні ключі, які не дозволяють неправильно підключати роз'єми живлення до системної плати. Такий роз'єм дозволяє підключити живлення до системної плати єдино правильним способом.
В наступній таблиці приведені характеристики контактів роз'ємів блоку живлення AT/LPXРоз'єм Контакт Сигнал Колір Роз'єм Контакт Сигнал Колір
Р8(
або
Р1)
1 Power_Good (+5B) Оранжевий
Р9(
або
Р2)
1 Загальний Чорний2 +5 В* Червоний 2 Загальний Чорний3 +12 В Жовтий 3 -5В Білий4 -12В Синій 4 +5 В Червоний5 Загальний Чорний 5 +5 В Червоний6 Загальний Чорний 6 +5 В Червоний
*У старшіх системних платах і блоках живлення PC/XT цей вивід (Р8, контакт 2) не використовувався.У таблиці приведені типові колірні коди, які можуть варіюватися для кожного виробника.Головний роз'єм живлення АТХ
21
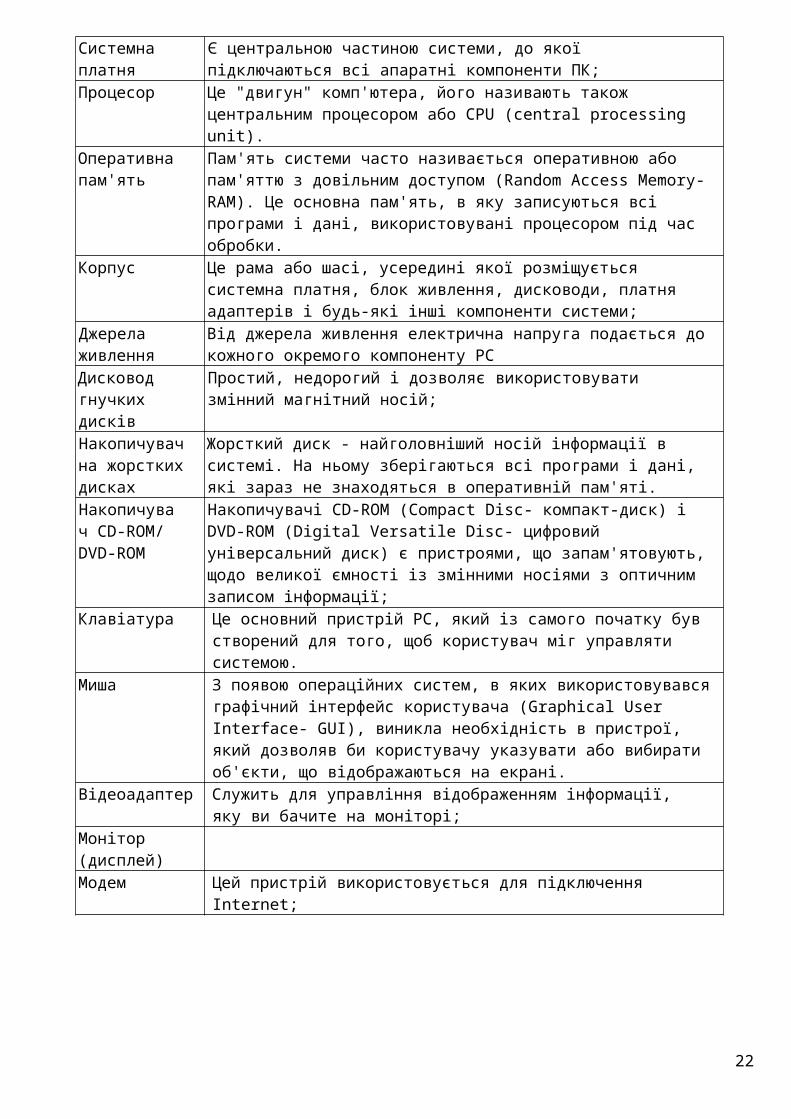
Новий стандарт для роз'ємів блоків живлення використовується тільки в новій конструкції АТХ: 20-контактний роз'єм. Розташування виводів роз'єму живлення краще показувати з боку дротів. Це дозволить правильно зорієнтувати роз'єм з'єднувача при його підключенні до роз'єму системної плати.
Розводка 20-контактного роз'єму блоку живлення АТХ приведена в наступній таблиці Колір Сигнал Контакт Контакт Сигнал КолірОранжевий +3,3 В* 11 1 +3,3 В* ОранжевийСиній -12В 12 2 +3,3 В* ОранжевийЧорний Загальний 13 3 Загальний ЧорнийЗелений PS_On 14 4 +5 В ЧервонийЧорний Загальний 15 5 Загальний ЧорнийЧорний Загальний 16 6 +5 В ЧервонийЧорний Загальний 17 7 Загальний ЧорнийБілий -5В 18 8 Power_Good СірийЧервоний +5 В 19 9 5v_Stby РожевийЧервоний +5 В 20 10 +12 В Жовтий
* Необов'язковий сигнал.Роз'єм АТХ12V.
Живлення до процесора подається від пристрою, званого модулем регулятора напруги (VRM), який в даний час присутній в більшість сучасних системних плат. Цей модуль прочитує необхідні параметри споживаної потужності процесора (звично через виведення процесора) і відповідним чином калібрує подаваєму напругу. Конструкція регулятора напруги дозволяє подавати 5 або 12 В. У системі в основному використовується напруга 5 В, але багато компонентів в даний час переходять на 12 В, що пов'язане з їх енергоспоживанням. Крім того, напруга 12 В використовується, як правило, приводним електродвигуном, а всі інші пристрої споживають напругу 5 В. Величина напруги, споживаної VRM (5 або 12 В), залежить від параметрів використовуваної системної плати або конструкції регулятора. Сучасні інтегральні схеми регуляторів напруги призначені для роботи при вхідній напрузі від 4 до 36 В, тому їх конфігурація цілком залежить від розробника системної плати.
Для підвищення енергозабезпечення системної плати в Intel була створена нова специфікація блоків живлення ATX12V. Результатом цього став новий силовий роз'єм, призначений для подачі додаткової напруги +12 В на системну плату. Цей силовий роз'єм показаний на наступному малюнку.
При заміні встановленої системної плати може виявитися, що для нової плати необхідний роз'єм ATX12V, що вимагається для підключення регулятора напруги процесора. Не зневіряйтеся, якщо блок живлення не має потрібного роз'єму. Існує простий вихід з цього положення — достатньо всього лише переробити один з периферійних силових роз'ємів в роз'єм ATX12V.
Призначення виводів роз'єму блоку живлення АТХ12V (вигляд з боку дротів) подане в наступній таблиці.
Колір Сигнал Контакт Контакт Сигнал КолірЖовтий +12 В 3 1 Загальний Чорний Жовтий +12 В 4 2 Загальний Чорний
Стандарт ATX версії 2.03.Найпоширеніший стандарт блоків живлення сьогодні — ATX12V версії 2.03, він прийшов на зміну застарілим БЖ сімейства ATX. Як видно по його назві, стандарт проектувався для забезпечення живлення основних пристроїв комп'ютера від напруги +12 В. Починаючи з 2000 року специфікації стандарту постійно обновляються, і сьогодні ATX 2.03 повністю замінив ATX 1.0, існуючий з 1995 р. (обидва стандарти були введені компанією Intel).Існує декілька версій ATX: 1.х, 2х (на даний момент широко використовуються 2.x версії). Основна відмінність версій полягає в різному розподілі потужностей, споживаних від шин +12 В, +5 В, +3,3 В. Так, стандарт 1.0 припускав живлення компонентів ПК в основному від останніх двох шин, але із зростанням частот процесори і відеокарти вже не могли стабільно працювати на малих напругах, додатково зростав споживаний ними струм — відбувся перехід цих пристроїв на +12 В. Значні зміни відбулися з версією 2.0 — максимально допустима потужність по шині +12 В вже перевершує комбіновану потужність по шинах +5 В і +3,3 В. На зміну традиційному 20-контактному роз'ємі живлення
22

материнської плати почав використовуватися новий 24-контактний (повністю сумісний із старим). У випадку, якщо споживання струму по шині +12 В перевищує 18 А, шина розділяється на дві частини (максимальні значення струмів для кожної з частин можуть не співпадати). Товщина дротів також була збільшена. Все це відбулося унаслідок обмеження протікаючого струму — дуже великий струм може пошкодити ланцюг живлення.Призначення виводів роз’ємів в стандарті ATX12V версії 2.03 можна взнати з наступного малюнку.
Співставлені основні роз’єми стандартів ATX версій 1.х та 2.03 показані на наступному малюнку.
Також в стандарті ATX 2.03 з'явився обов'язковий роз'єм живлення SATA. Він вже зустрічався в стандарті 1.3, але тепер став обов'язковим. Отже настав час попрощатися з перехідниками живлення для вінчестерів SATA. Але стандарт ATX не обумовлює число роз'ємів живлення SATA.
Стандартна архітектура системи на базі Pentium процесора. Особливості архітектури нових систем. Північний та південний міст, їх функції.
Компоненти системної платиУ сучасну системну плату вбудовані такі компоненти, як гнізда процесорів, роз'єми і мікросхеми. Найсучасніша
системна плата містить наступні компоненти:• гніздо для процесора;• набір мікросхем системної логіки (компоненти North/South Bridge або Hub);• мікросхема Super I/O;• базова система вводу-виводу(ROM BIOS);• гнізда модулів пам'яті SIMM/DIMM/RIMM;• роз'єми шин ISA/PCI/AGP,PCI-E;• роз’єм AMR (Audio Modem Riser);• роз’єм CNR (Communications and Networking Riser);• перетворювач напруги для центрального процесора;• батарея.
Деяка системна плата також включає інтегровані аудіо- і відеоадаптери, мережевий і SCSI-інтерфейси, а також інші елементи, залежно від типу системної плати. Гнізда для процесорів
Процесори можна встановлювати в гнізда типа Socket або Slot.Процесори, що розробляються Intel (починаючи з 486-го), користувач може встановлювати і замінювати
самостійно. Були розроблені стандарти для гнізд типу Socket, в які можна встановити різні моделі конкретного процесора. Кожен тип гнізда Socket або Slot має свій номер. Будь-яка системна плата містить гніздо типа Socket або типу Slot; по номеру можна точно визначити, які типи процесорів можуть бути встановлені в дане гніздо.
Спочатку, процесори всіх типів встановлювалися в гнізда (або впаювалися безпосередньо в системну плату). З появою Pentium П і перших версій процесорів Athlon, компанії Intel і AMD перейшли до іншої конструкції, розробленої в наслідок того, що в процесори була включена вбудована кеш-пам'ять другого рівня, що добавляється у вигляді окремих мікросхем пам'яті Static RAM (SRAM) у сторонніх виробників. Таким чином, процесор містив в собі вже декілька різних мікросхем, встановлених на дочірній платі, яка, у свою чергу, була підключена в роз'єм системної плати. Основним недоліком цієї вельми непоганої конструкції є додаткові витрати, пов'язані з придбанням мікросхем
23

кеш-пам'яті, дочірньої плати, роз'єму, корпусу або упаковки, механізмів підтримки і підставок для установки процесора і тепловідводу. В результаті собівартість процесора, вмонтовуваного на окремій платі, виявилася значно вище в порівнянні з попередніми версіями процесорів Socket.
З появою другого покоління процесорів Celeron компанія Intel почала інтегрувати кеш-пам'ять другого рівня безпосередньо в кристал процесора, не додаючи в схему процесора яких-небудь додаткових мікросхем. Друге покоління процесорів Pentium III (кодове ім'я Coppermine), процесори К6-3, Duron (кодове ім'я Spitfire) і друге покоління процесорів Athlon (кодове ім'я Thunderbird) компанії AMD (ранні версії процесора Thunderbird Athlon мають конфігурацію Slot А) також містять вбудовану кеш-пам'ять другого рівня. Поява вбудованого кеша дозволила повернутися до однокристальної конструкції процесора, а отже, відмовитися від його установки на окремій платі. В результаті інтеграції кеш-пам'яті другого рівня виробники повернулися до конструкції Socket, яка збережеться, ймовірно, в осяжному майбутньому. В даний час конструкція процесорів Socket використовується практично у всіх сучасних моделях. Крім того, інтеграція кеш-пам'яті дозволила підвищити робочу частоту кеша другого рівня з половини або однієї третини до повної тактової частоти процесора.
Характерною особливістю процесора Itanium є корпус, що містить кеш-пам'ять третього рівня, також встановлюваний в гніздо системної плати.Набори мікросхем системної логіки
Сучасну системну плату неможливо представити без мікросхем системної логіки. Набір мікросхем подібний системній плати. Іншими словами, дві будь-які плата з однаковим набором мікросхем функціонально ідентичні. Набір мікросхем системної логіки включає інтерфейс шини процесора (яка називається також Front-Side Bus або FSB), контроллери пам'яті, контроллери шини, контроллери вводу-виводу і т.п. Всі схеми системної плати також містяться в наборі мікросхем. Якщо порівнювати процесор комп'ютера з двигуном автомобіля, то аналогом набору мікросхем є, швидше за все, шасі. Воно є металевим каркасом, що служить для установки двигуна і виконує роль проміжної ланки між двигуном і зовнішнім світом. Набір мікросхем — це рама, підвіска, рульовий механізм, колеса і шини, коробка передач, карданний вал, диференціал і гальма. Шасі автомобіля є механізмом, що перетворює енергію двигуна в поступальну ходу транспортного засобу. Набір мікросхем, у свою чергу, є з'єднанням процесора з різними компонентами комп'ютера. Процесор не може взаємодіяти з пам'яттю, платою адаптера і різними пристроями без допомоги наборів мікросхем. Якщо скористатися медичною термінологією і порівняти процесор з головним мозком, то набір мікросхем системної логіки по праву займе місце хребта і центральної нервової системи.
Набір мікросхем управляє інтерфейсом або з'єднаннями процесора з різними компонентами комп'ютера. Тому він визначає кінець кінцем тип і швидкодію використовуваного процесора, робочу частоту шини, швидкість, тип і об'єм пам'яті. По суті, набір мікросхем відноситься до числа найважливіших компонентів системи, навіть, напевно, важливіших, ніж процесор. Іноді доводиться бачити системи з потужними процесорами, які програвали в швидкодії системам, що містять процесори меншої частоти, але більш функціональні набори мікросхем. Під час змагань досвідчений гонщик часто перемагає не за рахунок високої швидкості, а за рахунок умілого маневрування. При компоновці системи необхідно починати в першу чергу з набору мікросхем системної логіки, оскільки саме від його вибору залежить ефективність процесора, модулів пам'яті, пристроїв вводу-виводу, а також різноманітні можливості розширення.Набори мікросхем системної логіки компанії Intel
В даний час Intel займає домінуюче положення на ринку наборів мікросхем системної логіки. Необхідно помітити, що це стало можливо значною мірою завдяки компанії Compaq, за допомогою якої Intel вийшла на перше місце у виробництві мікросхем.
Все почалося з того, що в 1989 році Compaq розробила шину EISA, яка, як передбачалося, повинна стати стандартом ринку. Але компанія відмовилася надати стороннім розробникам набір мікросхем системної логіки для цієї шини (тобто набір спеціальних мікросхем, необхідних для функціонування шини EISA на системній платі).
У Intel було ухвалено рішення про поставку наборів мікросхем системної логіки складальникам комп'ютерів на основі системної плати EISA. Шина EISA, як відомо, потерпіла невдачу, зумівши лише на короткий час зайняти вільну нішу серверного ринку. Проте Intel за цей час встигла набути безцінного досвіду у виробництві наборів мікросхем. З появою процесорів 286 і 386 виявилося, що створення наборів мікросхем, відповідних новим конструкціям процесорів, віднімає у компаній-виробників дуже багато час і приводить до затримки випуску системної плати, що підтримує ці процесори. Наприклад, між появою процесора 286 і випуском першої системної плати, створеної на його основі, пройшло більше двох років, а для створення першої системної плати на основі процесора 386 потрібно трохи більше року. Кількість процесорів Intel, що продаються, була обмежена відсутністю Intel-сумісної системної плати від інших виробників. Тому в Intel вирішили вести паралельну розробку процесорів і наборів логічних мікросхем, використовуваних в системній платі. Це привело до якісного стрибка у виробництві системної плати, забезпечивши виробників готовими наборами мікросхем системної логіки.
Таке важливе рішення незабаром одержало практичне підтвердження. У квітні 1989 року одночасно з процесором 486 Intel випустила набір мікросхем серії 420. Це дозволило виробникам практично відразу почати виробництво системної плати, і перша плата серії 486 з'явилася буквально через декілька місяців. Не можна сказати, що подібна практика обрадувала інших виробників; адже в особі Intel вони одержали гідного конкурента.
Починаючи з 1989 року Intel стала створювати процесори і набори мікросхем системної логіки, що складає приблизно 90% компонентів типової системної плати. Що може послужити кращою гарантією сумісності апаратних компонентів, ніж системна плата і процесор Pentium, виготовлені в у свій час одним виробником і призначені один для одного? У 1993 році Intel одночасно з першим процесором Pentium представила набір мікросхем системної логіки 430LX, а також повністю закінчену системну плату. Це викликало засмучення не тільки виробників наборів мікросхем, але і компаній, що займаються збіркою системної плати. Мало того що Intel була основним постачальником компонентів, необхідних для формування системної плати (процесори і набори мікросхем системної
24

логіки), але вона зайнялася виробництвом і продажем готової системної плати! До 1994 року Intel не тільки домінувала на ринку процесорів і наборів мікросхем, але, по суті, монополізувала ринок системної плати.
У наші дні, разом з розробкою процесорів, Intel продовжує займатися створенням наборів мікросхем системної логіки і системної плати, тобто об’явлення і випуск нового продукту відбувається практично одночасно. Подібний підхід дозволяє позбавитися властивих початку комп'ютерної епохи затримок, які виникають між створенням нових процесорів і появою системної плати, де вони можуть бути використані. З погляду споживача, це означає, в першу чергу, можливість швидкого використання нової системи. Починаючи з 1993 року, тобто з моменту появи оригінального процесора Pentium, користувачі дістали можливість придбавати готові системи в день випуску нового процесора.
По номеру на більшій мікросхемі системної плати можна ідентифікувати набір мікросхем системної логіки. Наприклад, в системах на базі процесорів Pentium II/III широко використовується набір мікросхем системної логіки 440ВX, який складається з двох компонентів: 82443ВХ North Bridge і 82371ЕХ South Bridge. Набір мікросхем 850 підтримує Pentium 4 і складається з двох основних частин: 82850 Memory Controller Hub (MCH) і 82801ВА I/O Controller Hub (ICH2). Прочитавши логотип компанії (Intel або який-небудь інший), а також номера компонентів і комбінації символів мікросхем системної плати, можна легко ідентифікувати набір мікросхем, використовуваний в конкретній системі.
При створенні наборів мікросхем Intel використовує два різні типи архітектури: North/South Bridge і сучаснішу Hub-архітектуру, яка використовується у всіх останніх наборах мікросхем системної логіки серії 800.Набори мікросхем для процесорів AMD Athlon/Duron
Випустивши на ринок процесори Athlon/Duron, компанія AMD пішла на ризикований крок: для них не існувало наборів мікросхем системної логіки, а крім того, вони були несумісні з існуючими роз'ємами Intel для процесорів Pentium II/III і Celeron. Замість "підгонки" до існуючих стандартів Intel компанія AMD розробила власний набір мікросхем і на його базі системну плата для процесорів Athlon/Duron.
Цей набір мікросхем одержав назву AMD 750 (кодова назва Irongate) і підтримує процесори Socket/Slot А. Він складається з мікросхем 751 System Controller (компонент North Bridge) і 756 Peripheral Bus Controller (компонент South Bridge). He так давно AMD представила набір мікросхем AMD-760 для процесорів Athlon/Duron, який є першим основним набором мікросхем системної логіки, підтримуючим пам'ять DDR SDRAM. Він складається з двох мікросхем: AMD-761 System Bus Controller (компонент North Bridge) і AMD-766 Peripheral Bus Controller (компонент South Bridge). Ряд компаній, до числа яких увійшли VIA Technologies і SiS, створив декілька наборів мікросхем, розроблених спеціально для процесорів AMD типу Socket/Slot А. Це дало можливість компаніям-виробникам розробити декілька типів системної плати, що підтримує вказані мікросхеми і процесори Athlon/Duron, що дозволило, у свою чергу, відітнути неабияку частку ринку у компанії Intel.Архітектура North/South Bridge
Більшість ранніх версій наборів мікросхем Intel (і практично всі набори мікросхем інших виробників) створена на основі багаторівневої архітектури і містить компоненти North Bridge і South Bridge, а також мікросхему Super I/O.
• North Bridge. Цей компонент є з'єднанням швидкодійної шини процесора (400/266/200/133/100/66 Мгц) з повільнішими шинами AGP (533/266/133/66 Мгц) і PCI (33 Мгц).
• South Bridge. Цей компонент є мостом між шиною PCI (66/33 Мгц) і повільнішою шиною ISA (8 Мгц).• Super I/O. Це окрема мікросхема, приєднана до шини ISA, яка фактично не є частиною набору мікросхем і
часто поставляється стороннім виробником, наприклад National Semiconductor або Standard Microsystems Corp. (SMSC). Мікросхема Super I/O містить звичайно використовувані периферійні елементи, об'єднані в одну мікросхему.
Набори мікросхем, створені за останні роки, дозволяють підтримувати різні типи процесорів, швидкості шин і схеми периферійних з'єднань.
North Bridge іноді називають контролером РАС (PCI/AGP Controller). По суті, він є основним компонентом системної плати і єдиною, за винятком процесора, схемою, що працює на повній частоті системної плати (шини процесора). У сучасних наборах мікросхем використовується однокристальна мікросхема North Bridge; у раніших версіях знаходилося до трьох окремих мікросхем, що становлять повну схему North Bridge.
South Bridge — компонент в наборі мікросхем системної логіки з нижчою швидкодією; він завжди знаходився на окремій мікросхемі. Одна і та ж мікросхема South Bridge може використовуватися в різних наборах мікросхем системної логіки. (Різні типи схем North Bridge, як правило, розробляються з врахуванням того, щоб міг використовуватися один і той же компонент South Bridge.) Завдяки модульній конструкції набору мікросхем системної логіки стало можливим понизити вартість і розширити поле діяльності для виробників системної плати. South Bridge підключається до шини PCI (33 Мгц) і містить інтерфейс шини ISA (8 Мгц). Крім того, звичайно він містить дві схеми, які реалізовують інтерфейс контроллера жорсткого диска IDE і інтерфейс USB (Universal Serial Bus — універсальна послідовна шина), а також схеми, що реалізовують функції пам'яті CMOS і годинника. South Bridge містить також всі компоненти, необхідні для шини ISA, включаючи контроллер прямого доступу до пам'яті і контроллер переривань.
Мікросхема Super I/O, яка є третім компонентом системної плати, сполучена з шиною ISA (8 Мгц) і містить всі стандартні периферійні пристрої, вбудовані в системну плату. Наприклад, велика частина мікросхем Super I/O підтримує паралельний порт, два послідовні порти, контроллер гнучких дисків, інтерфейс клавіатура/миші. До числа додаткових компонентів можуть бути віднесені CMOS RAM/Clock, контроллери IDE, а також інтерфейс ігрового порту. Системи, що містять порти IEEE-1394 і SCSI, використовують для портів цього типу окремі мікросхеми.Hub-архітектура
У новій серії 800 набору мікросхем використовується hub-архітектура, в якій компонент North Bridge одержав назву Memory Controller Hub (МСН), а компонент South Bridge — I/O Controller Hub (ICH). В результаті з'єднання
25

компонентів за допомогою шини PCI утворюється стандартна конструкція North/South Bridge. У hub-архітектурі з'єднання компонентів виконується за допомогою виділеного hub-інтерфейсу, швидкість якого удвічі вища швидкості шини PCI. Hub-архітектура володіє деякими певними перевагами по відношенню до традиційної конструкції North/South Bridge.
• Збільшена пропускна здатність. Hub-інтерфейс є 8-розрядним інтерфейсом 4Х (чотирьохтактний) з тактовою частотою 66 Мгц (4 х 66 Мгц х 1 байт =266 Мбайт/с), що має подвоєну по відношенню до PCI пропускну здатність (33 Мгц х 32 байт = 133 Мбайт/с).
• Зменшене завантаження PCI. Hub-інтерфейс не залежить від PCI і не бере участь в перерозподілі або захопленні смуги пропускання шини PCI при виконанні трафіку набору мікросхем або Super I/O. Це підвищує ефективність всієї решти пристроїв, приєднаних до шини PCI, яка не бере участь у виконанні групових операцій.
• Зменшення монтажної схеми. Не дивлячись на подвоєну в порівнянні з PCI пропускну здатність, hub-інтерфейс має ширину, рівну 8 розрядам, і вимагає для з'єднання з системною платою всього лише 15 сигналів. Шині PCI, наприклад, для виконання подібної операції потрібно не менше 64 сигналів, що приводить до підвищення генерації електромагнітних перешкод, погіршення сигналу, появі "шуму" і зрештою до збільшення собівартості плати.
Hub-архітектура передбачає збільшення пропускної здатності пристроїв PCI, що пов'язана з відсутністю компоненту South Bridge, що передає потік даних від мікросхеми Super I/O і завантажує тим самим шину PCI. Завдяки обходу PCI hub-архітектура дозволяє збільшити пропускну здатність пристроїв, безпосередньо сполучених з I/O Controller Hub (раніше South Bridge), до яких відносяться нові швидкодійні інтерфейси АТА-100 і USB 2.O.
Конструкція hub-інтерфейсу, ширина якого рівна 8 біт, достатньо економічна. Ширина інтерфейсу може показатися недостатньою, але така конструкція повністю себе виправдовує. При ширині інтерфейсу 8 біт достатньо тільки 15 сигналів, тоді як 32-розрядний інтерфейс шини PCI, використовуваний в традиційній конструкції North/South Bridge, вимагає 64 сигналів. Менше число висновків говорить про спрощену схему маршрутизації плати, зменшення перешкод і підвищення стійкості сигналу. Це приводить до зниження числа висновків використовуваних мікросхем, зменшення їх розмірів і собівартості.
Не дивлячись на те що одночасно можуть бути передані тільки 8 біт інформації, hub-інтерфейс дозволяє виконати чотири передачі за один такт, ніж і досягається робоча частота 66 Мгц. В результаті фактична пропускна здатність дорівнює 266 Мбайт/с (4 х 66 Мгц х 1 байт). Це удвічі більше смуги пропускання шини PCI, що має ширину 32 біт, але виконуючої тільки одну передачу з частотою 33 Мгц при загальній пропускній здатності 133 Мбайт/с. Завдяки зменшенню ширини і збільшенню швидкості конструкції hub-інтерфейс дозволяє досягти високої ефективності при зниженні собівартості і підвищенні стійкості сигналу.
Компонент МСН здійснює з'єднання швидкодійної шини процесора (400/133/100/66 Мгц) і hub-інтерфейсу (66 Мгц) з шиною AGP (533/266/133/66 Мгц); компонент ICH, у свою чергу, пов'язує hub-інтерфейс (66 Мгц) з портами ATA (IDE) (66/100 Мгц) і шиною PCI (33 Мгц).
Крім того, в ICH міститься нова шина Low-Pin-Count (LPC), що є 4-розрядною версією шини PCI, яка була розроблена в першу чергу для підтримки мікросхем системної плати ROM BIOS і Super I/O. Разом з чотирма сигналами функцій даних, адрес і команд для функціонування шини потрібно дев'ять додаткових сигналів, що складе в цілому тринадцять сигналів. Це дозволяє значно зменшити кількість ліній, що сполучають ROM BIOS з мікросхемами Super I/O. Для порівняння: у ранніх версіях наборів мікросхем North/South Bridge як інтерфейс використовувалася шина ISA, кількість сигналів якої рівна 96. Максимальна пропускна здатність шини LPC досягає 6,67 Мбайт/с, що приблизно відповідає параметрам ISA і більш ніж достатньо для підтримки таких пристроїв, як ROM BIOS і мікросхеми Super I/O.Призначення і функціонування шин
Основою системної плати є різні шини, що служать для передачі сигналів компонентам системи. Шина (bus) є загальним каналом зв'язку, використовуваним в комп'ютері і дозволяючим з'єднати два або більше системних компоненти.
Існує певна ієрархія шин PC, яка виражається у тому, що кожна повільніша шина сполучена з швидшою. Сучасні комп'ютерні системи включають три, чотири або більше шин. Кожен системний пристрій сполучений з якою-небудь шиною, причому певні пристрої (найчастіше це набори мікросхем) виконують роль моста між шинами.
• Шина процесора. Ця високошвидкісна шина є ядром набору мікросхем і системної плати. Використовується в основному процесором для передачі даних між кеш-пам'яттю або основною пам'яттю і компонентом North Bridge набору мікросхем. У системах на базі процесорів Pentium II ця шина працює на частоті 66, 100, 133 або 200 Мгц і має ширину 64 розряди.
• Шина PCI Express (3GIO) — інтерфейс, що є високоефективною шиною для майбутніх ПК, вибраний недавно спеціальною групою PCI SIG (PCI Special Interest Group) для заміни нині використовуваної шини PCI
• Шина AGP. Ця 32-розрядна шина працює на частоті 66 (AGP 1х), 133 (AGP 2х) або 266 Мгц (AGP 4х) і призначена для підключення відеоадаптера. Вона підключається до компоненту North Bridge або Memory Controller Hub (MCH) набору мікросхем системної логіки.
• Шина PCI. Ця 32-розрядна шина працює на частоті 33 Мгц; використовується починаючи з систем на базі процесорів 486. В даний час є реалізація цієї шини з частотою 66 Мгц. Знаходиться під управлінням контроллера PCI — частини компоненту North Bridge або Memory Controller Hub (MCH) набору мікросхем. На системній плати встановлюються роз'єми, звично чотири або більш, в які можна підключати мережеві, SCSI- і відеоадаптери, а також інше устаткування, що підтримує цей інтерфейс. До шини PCI підключається компонент South Bridge набору мікросхем, який містить реалізації інтерфейсу IDE і USB.
26

• Шина ISA. Це 16-розрядна шина, що працює на частоті 8 Мгц; вперше стала використовуватися в системах AT в 1984 році (була 8-розрядною і працювала на частоті 5 Мгц). Мала широке розповсюдження до теперішнього часу, але із специфікації РС99 виключена. Реалізується за допомогою компоненту South Bridge. Найчастіше до цієї шини підключається мікросхема Super I/O.
Деяка сучасна системна плата містить спеціальний роз'єм, що одержав назву Audio Modem Riser (AMR) або Communications and Networking Riser (CNR). Подібні спеціалізовані роз'єми призначені для плати розширення, забезпечуючих виконання мережевих і комунікаційних функцій. Слід помітити, що ці роз'єми не є універсальним інтерфейсом шини, тому лише небагато із спеціалізованої плати AMR або CNR присутні на відкритому ринку. Як правило, така плата додається до якої-небудь певної системної плати. Їх конструкція дозволяє легко створювати як стандартну, так і розширену системну плату, без необхідності резервувати місце на плати для установки додаткових мікросхем. Більшість системної плати, що забезпечує стандартні мережеві функції і функції роботи з модемом, створена на основі шини PCI, оскільки роз'єми AMR/CNR мають спеціалізоване призначення.
У сучасній системній плати існують також приховані шини, які ніяк не виявляються у вигляді гнізд або роз'ємів. Маються на увазі шини, призначені для з'єднання компонентів наборів мікросхем, наприклад hub-інтерфейсу і шини LPC. Hub-інтерфейс є чотирьохтактну(4х) 8-розрядна шину з робочою частотою 66 Мгц, яка використовується для обміну даними між компонентами МСН і ICH набору мікросхем (hub-архітектура). Пропускна здатність hub-інтерфейсу досягає 266 Мбайт/с, що дозволяє використовувати його для з'єднання компонентів набору мікросхем в недорогих конструкціях.
Для подібних цілей призначена і шина LPC, яка є 4-розрядною шиною з максимальною пропускною спроможністю 6,67 Мбайт/с і застосовується як економічніший в порівнянні з шиною ISA варіант. Звичайно шина LPC використовується для з'єднання Super I/O або компонентів ROM BIOS системної плати з основним набором мікросхем. Шина LPC має приблизно рівну робочу частоту, але використовує значно менше контактів. Це дозволяє повністю відмовитися від використовування шини ISA в системній плати.
Системний набір мікросхем — це диригент, який керує оркестром системних компонентів системи, дозволяючи кожному з них підключитися до власної шини.
Зверніть увагу, що для підвищення ефективності в багатьох шинах протягом одного такту виконується декілька циклів даних (передач даних). Це означає, що швидкість передачі даних вища, ніж це може показатися на перший погляд. Існує достатньо простий спосіб підвищити швидкодію шини за допомогою назад сумісних компонентів.Шина процесора
Ця шина сполучає процесор з компонентом набору мікросхем North Bridge або Memory Controller Hub. Вона працює на частотах 66-200 Мгц. Використовується для передачі даних між процесором і основною системною шиною або між процесором і зовнішньої кеш пам’яттю в системах на базі процесорів п'ятого покоління. Взаємодія шин в типовому комп'ютері на базі процесора Pentium (Socket 7) показана на мал. нижче.
У системах, створених на основі процесорів Socket 7, зовнішня кеш-пам'ять другого рівня встановлена на системній плати і сполучена з шиною процесора, яка працює на частоті системної плати (звично від 66 до 100 Мгц). Таким чином, при появі процесорів Socket 7 з вищою тактовою частотою робоча частота кеш-пам'яті залишилася рівній порівняно низькій частоті системної плати. Наприклад, в найбільш швидкодійних системах Intel Socket 7 частота процесора рівна 233 Мгц, а частота шини процесора при множнику 3,5х досягають тільки 66 Мгц. Отже, кеш-пам'ять другого рівня також працює на частоті 66 Мгц. Візьмемо, наприклад, систему Socket 7, що використовує процесори AMD K6-2 550, які працюють на частоті 550 Мгц; при множнику 5,5х частота шини процесора рівна 100 Мгц. Отже, в цих системах частота кеш пам’яті другого рівня досягає тільки 100 Мгц.
27

Архітектура системи на базі процесора Pentium (Socket 7)Проблема повільної кеш-пам'яті другого рівня була розв'язана в процесорах класу Р6, таких, як Pentium Pro,
Pentium П, Celeron, Pentium Ш, а також AMD Athlon і Duron. У цих процесорах використовувалися роз'єми Socket 8, Slot I, Slot 2, Slot А, Socket А або Socket 370. Крім того, кеш-пам'ять другого рівня була перенесена з системної плати безпосередньо в процесор і сполучена з процесором за допомогою вбудованої шини.
Включення кеш-пам'яті другого рівня в процесор дозволило значно збільшити її швидкість. У сучасних процесорах кеш-пам'ять розташована безпосередньо в кристалі процесора, тобто працює з частотою процесора. У раніших версіях кеш-пам'ять другого рівня знаходилася в окремій мікросхемі, інтегрованій в корпус процесора, і працювала з частотою, рівної 1/2, 2/5 або 1/3 частоти процесора. Проте навіть в цьому випадку швидкість інтегрованої кеш-пам'яті була значно вище швидкості зовнішнього кеша, обмеженого частотою системної плати Socket 7.
На мал. нижче показана архітектура типової системи Slot 1 (або Slot А) з вбудованою кеш-пам'яттю другого рівня, частота якої рівна половинній частоті процесора. Підвищення частоти шини процесора з 66 до 100 Мгц привело, у свою чергу, до збільшення
28

Архітектура системи на базі процесора Pentium 11 (Slot 1)пропускної здатності до 800 Мбайт/с. Зверніть увагу, що в більшість систем була включена підтримка AGP. Частота стандартного інтерфейсу AGP рівна 66 Мгц (тобто удвічі більше швидкості PCI), але більшість цих систем підтримує AGP 2х, швидкодія якого удвічі вища стандартного AGP, що приводить до підвищення пропускної здатності до 533 Мбайт/с. Крім того, в цих системах звичайно використовувалися модулі пам'яті РС100 SDRAM DIMM, швидкість передачі даних яких рівна 800 Мбайт/с.
У системах Pentium TTT і Celeron роз'єм Slot 1 поступився місцем кублу Socket 370. Це було пов'язано головним чином з тим, що сучасніші процесори містять вбудовану кеш-пам'ять другого рівня (працюючу на повній частоті ядра), а значить, зникла потреба в дорогому корпусі, що містить декілька мікросхем. Швидкість шини процесора збільшилася до 133 Мгц, що спричинило за собою підвищення пропускної здатності до 1066 Мбайт/с. У сучасних системах використовується вже AGP 4х із швидкістю передачі даних 1066 Мбайт/с. На мал. 4.38 показана архітектура типової системи Socket 370.
29
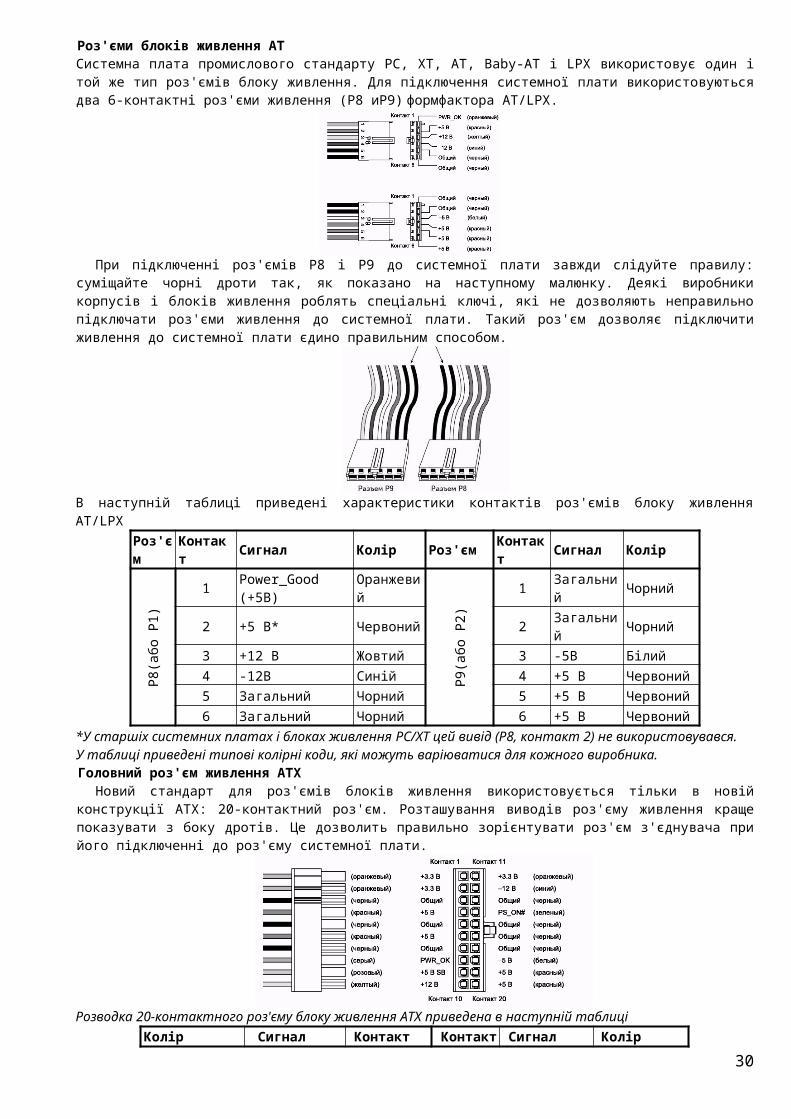
Архітектура системи на базі процесора Pentium Ill/Celeron (Socket 370)Зверніть увагу на hub-архітектуру Intel, використовувану замість традиційної North/South Bridge. У цій конструкції
основне з'єднання між компонентами набору мікросхем було перенесене у виділений hub-інтерфейс із швидкістю передачі даних 266 Мбайт/с (удвічі більше, ніж у шини PCI), що дозволило пристроям PCI використовувати повну, без урахування компоненту South Bridge, пропускну здатність шини PCI. Крім того, мікросхема Hash ROM BIOS, звана тепер Firmware Hub, з'єднується з системою через шину LPC. Як вже наголошувалося, в архітектурі North/South Bridge для цього використовувалася мікросхема Super I/O. У більшості систем для з'єднання мікросхеми Super I/O замість шини ISA тепер використовується шина LPC. При цьому hub-архітектура дозволяє відмовитися від використовування Super I/O. Порти, підтримувані мікросхемою Super I/O, називаються стандартними (legacy), тому конструкція без Super I/O одержала назву нестандартної (legacy-free) системи. У такій системі пристрою, використовуючі стандартні порти, повинні бути приєднані до комп'ютера за допомогою USB. У цих системах звичайно використовується два контроллери і до чотирьох загальних портів (додаткові порти можуть бути підключені до вузлів USB).У системах, створених на базі процесорів AMD, застосована конструкція Socket А, в якій використовуються швидші в порівнянні з Socket 370 процесор і шини пам'яті, але все ще зберігається конструкція North/South Bridge. Архітектура типової системи Socket А (Athlon/Duron) показана на мал. 4.39.
30

Архітектура системи на базі процесорів Athlon/Duron (Socket A)Зверніть увагу на швидкодійну шину процесора, частота якої досягає 266 Мгц (пропускна здатність 2133 Мбайт/с), а також на використовувані модулі пам'яті DDR SDRAM DIMM, які підтримують аналогічну пропускну здатність (тобто 2133 Мбайт/с). Також слід помітити, що велика частина компонентів South Bridge включає функції, властиві мікросхемам Super I/O. Ці мікросхеми одержали назву Super South Bridge. Система Pentium 4 (Socket 423), створена на основі hub-архітектури, показана на мал. 4.40. Основною особливістю цієї конструкції є шина процесора, частота якої рівна 400 Мгц, а пропускна здатність досягає 3200 Мбайт/с. Це сама швидкодійна шина на сьогоднішній день. Крім того, слід звернути увагу на двохканальні PC-800 RDRAM RIMM, пропускна здатність яких (3200 Мбайт/с) відповідає пропускній здатності шини процесора, що дозволяє максимально підвищити продуктивність системи. Оскільки шина процесора повинна обмінюватися інформацією з процесором з максимально високою швидкістю, в комп'ютері вона функціонує набагато швидше за будь-яку іншу шину. Сигнальні лінії (лінії електричного зв'язку), що представляють шину, призначені для передачі даних, адрес і сигналів управління між окремими компонентами комп'ютера. Наприклад, в комп'ютері з процесором Pentium шина складається з 64 ліній даних, 32 ліній адреси і відповідних ліній управління. Комп'ютери з процесорами Pentium Pro і Pentium П мають по 36 ліній адреси.
31

Архітектура системи на базі процесора Pentium 4 (Socket 423)Тактова частота, використовувана для передачі даних по шині процесора, відповідає його зовнішній частоті. Це
слідує враховувати, оскільки в більшості процесорів внутрішня тактова частота, що визначає швидкість роботи внутрішніх блоків, може перевищувати зовнішню. Так, наприклад, Pentium 266 має внутрішню частоту процесора 266 Мгц, тоді як зовнішня частота складає всього 66,6 Мгц. Процесор Pentium П 450 має внутрішню частоту 450 Мгц, тоді як зовнішня частота складає всього 100 Мгц. У процесорах Pentium 133, 166, 200 і 233 шина працює на тактовій частоті 66,6 Мгц. У більшості сучасних комп'ютерів співвідношення частоти процесора і частоти шини відповідає одному з коефіцієнтів: 1,5х, 2х, 2,5х, Зх і т.д.
Шина процесора, підключена до процесора, по кожній лінії даних може передавати один біт даних протягом одного або двох періодів тактової частоти. Таким чином, в комп'ютерах з процесорами Pentium, Pentium Pro і Pentium П за один такт можна передати 64 біт.
Для визначення швидкості передачі даних по шині процесора необхідно помножити розрядність шини даних (64 для Pentium, Pentium Pro або Pentium П) на тактову частоту шини (вона рівна базовій (зовнішньої) тактовій частоті процесора). Процесори Pentium, Pentium MMX, Pentium Pro або Pentium П з базовою тактовою частотою 66 Мгц можуть передавати один біт по кожній лінії даних за один період тактової частоти, тому максимальна швидкість передачі даних складає 528 Мбайт/с.
Наприклад, при використовуванні процесора Pentium Ш з тактовою частою 1,13 ГГц, встановленого на системній плати, частота якої рівна 133 Мгц, максимальна миттєва швидкість передачі даних досягатиме приблизно 1066 Мбайт/с. Цей результат можна одержати, використовуючи наступну формулу:
133,33 Мгц х 8 байт (64 біт) = 1066 Мбайт/с.Для системи Athlon (Socket А) вийде наступне:266,66 Мгц х 8 байт (64 біт) = 2133 Мбайт/с.І для системи Pentium 4 (Socket 423):400 Мгц х 8 байт (64 біт) = 3200 Мбайт/с.Швидкість передачі даних, звана також пропускною спроможністю шини (bandwidth) процесора, є максимальною
швидкістю передачі даних.Шина пам'яті
Шина пам'яті призначена для передачі інформації між процесором і основною пам'яттю системи. Ця шина сполучена з набором мікросхем системної плати North Bridge або мікросхемою Memory Controller Hub. Залежно від типу пам'яті, використовуваної набором мікросхем (і, отже, системною платою), шина пам'яті може працювати з різними швидкостями. Якнайкращий варіант, якщо робоча частота шини пам'яті співпадатиме із швидкістю шини процесора. Пропускна здатність систем, що використовують пам'ять РС133 SDRAM, рівна 1066 Мбайт/с, що
32
співпадає з пропускною спроможністю шини процесора, працюючої на частоті 133 Мгц. Розглянемо інший приклад: у системах Athlon і деяких Pentium Ш використовується шина процесора з частотою 266 Мгц і пам'ять РС2100 DDR SDRAM, що має пропускну здатність 2133 Мбайт/с — таку ж, як і у шини процесора. У системі Pentium 4 використовується шина процесора з частотою 400 Мгц, а також двохканальна пам'ять RDRAM із швидкістю передачі даних для кожного каналу 1600 або 3200 Мбайт/с при одночасній роботі обох каналів пам'яті, що співпадає з пропускною спроможністю шини процесора Pentium 4.Пам'ять, що має ту ж частоту, що і шина процесора, дозволяє відмовитися від розташування зовнішньої кеш-пам'яті на системній плати. Саме тому кеш-пам'ять другого і третього рівнів була безпосередньо інтегрована в процесор.
Системна (материнська) плата, архітектура та конструктивне виконання. Стандарти материнських плат
Формфактори системної платиНайважливішим вузлом комп'ютера є системна плата (system board), іноді звана материнською (motherboard),
основною або головною платою (main board). Існує декілька найпоширеніших формфакторів, що враховуються при розробці системної плати. Формфактор
(form factor) є фізичними параметрами плати і визначає тип корпусу, в якому вона може бути встановлена. Формфактори системної плати можуть бути стандартними (тобто взаємозамінними) або нестандартними. Нестандартні формфактори, на жаль, є перешкодою для модернізації комп'ютера, тому від їх використання краще відмовитися. Найвідоміші формфактори системної плати перераховані нижче.
Застарілі:• Baby-AT;• повнорозмірна плата AT;• LPX.Сучасні:• АТХ;• Micro-ATX;• Flex-АТХ;• NLX;• WTX(B теперішній час не виробляються).Інші:• незалежні конструкції (розробки компаній Compaq, Packard Bell, Hewlett-Packard, портативні/мобільні
системи і т.д.).За останні декілька років відбувся перехід від системної плати оригінального форм-фактора Baby-AT, який
використовувався в перших комп'ютерах IBM PC і XT, до плати формфактора АТХ і NLX, використовуваної в більшості повнорозмірних настільних і вертикальних систем. Існує декілька варіантів формфактора АТХ, до числа яких входять Micro-ATX (який є зменшеною версією формфактора АТХ, використовуваного в системах малих розмірів) і flex-АТХ (ще більш зменшений варіант, призначений для домашніх комп'ютерів нижчого цінового рівня). Формфактор NLX призначений для корпоративних настільних систем; WTX, у свою чергу, розроблявся для робочих станцій і серверів з середнім режимом роботи, але широкого поширення не набув.
Не дивлячись на широке розповсюдження плати Baby-AT, повнорозмірної AT і LPX, їм на зміну прийшла системна плата сучасніших формфакторів, які фактично є промисловим стандартом, що гарантує сумісність кожного типу плати. Це означає, що системна плата АТХ може бути замінена іншою платою того ж типу, замість системної плати NLX може бути використана інша плата NLX і т.д. Завдяки додатковим функціональним можливостям сучасної системної плати, комп'ютерна індустрія змогла швидко перейти до нових формфакторів.
Системна плата, параметри яких не вписуються в якій-небудь з формфакторів промислового стандарту, відносяться до плати незалежних конструкцій. Купувати комп'ютери з нестандартною системною платою слід тільки у разі особливих обставин. Ремонт і модернізація таких систем досить дорогі, що зв'язане, в першу чергу, з неможливістю заміни системної плати, корпусів або джерел живлення іншими моделями. Системи незалежних формфакторів іноді називаються "одноразовими" PC, що стає очевидним, коли приходить час їх модернізації або ремонту після закінчення гарантійного терміну.Таблиця 4.1. Формфактори системної плати
Формфактор Область застосування АТХ Стандартні настільні комп'ютери в корпусах mini-tower і full-tower;
найприйнятніша конструкція як для новачків, так і для досвідчених користувачів, серверів і молодших моделей робочих станцій, а також домашніх систем вищого рівня. Плата ATX підтримує до семи роз'ємів розширення
Mini-ATX Зменшена версія ATX, яка використовується там же, де і плата АТХ. Багато які з так званих системних плат АТХ насправді є платами Mini-ATX.Системна плата Mini-ATX підтримує до шести розширювальних гнізд
Micro-ATX Настільні комп'ютери або вертикальні системи mini-Tower середнього рівня Flex-ATX Недорогі або менш продуктивні настільні або вертикальні системи
mini-Tower, використовувані в найрізноманітніших цілях
33
NLX Корпоративні настільні або вертикальні системи mini-Tower, відмінні простотою і зручністю обслуговування
ATXКонструкція ATX була розроблена порівняно недавно. У ній поєднуються якнайкращі риси стандартів Baby-AT і
LPX і закладено багато додаткових удосконалень. По суті, АТХ — це "лежача на боку" плата Baby-AT із зміненим роз'ємом і місцеположенням джерела живлення. Головне, що необхідно запам'ятати, — конструкція АТХ фізично не сумісна ні з Baby-AT, ні з LPX. Іншими словами, для системної плати АТХ потрібен особливий корпус і джерело живлення.
Вперше офіційна специфікація АТХ була опублікована компанією Intel в липні 1995 року і представлена як відкрита промислова специфікація. Системна плата АТХ з'явилася на ринку приблизно у середині 1996 року і швидко зайняла місце раніше використовуваної плати Baby-AT. У лютому 1997 року з'явилася версія 2.01 специфікації АТХ, після чого було зроблено ще декілька незначних змін. У травні 2000 року випускається остання (на сьогоднішній день) редакція специфікації АТХ (що містить рекомендацію Engineering Change Revision PI), яка одержала номер 2.03. Компанія Intel опублікувала докладну специфікацію АТХ, тим самим відкривши її для сторонніх виробників. Технічні характеристики існуючих специфікацій АТХ, а також інших типів системної плати можна одержати на Web-вузлі Desktop Form Factors за адресою: www.formfactors.org. В даний час АТХ є найпоширенішим формфактором системної плати, рекомендованим для більшості нових систем. Система АТХ залишиться розширюваною протягом ще багатьох років, в чому вона схожа на попередню їй системну плату Baby-AT.
Конструкція АТХ дозволила удосконалити стандарти Baby-AT і LPX.• Наявність вбудованої подвійної панелі роз'ємів вводу-виводу. На задній стороні системної плати є область з
роз'ємами вводу-виводу шириною 6,25 і висотою 1,75 дюйма. Це дозволяє розташувати зовнішні роз'єми безпосередньо на платі і виключає необхідність використання кабелів, що сполучають внутрішні роз'єми і задню панель корпусу, як в конструкції Baby-AT.
• Наявність одноключового внутрішнього роз'єму джерела живлення. Це спрощує заміну роз'ємів на джерелі живлення типа Baby-AT. Специфікація АТХ містить одноключовий роз'єм джерела живлення, який легко вставляється і який неможливо встановити неправильно. Цей роз'єм має контакти для підведення до системної плати напруги 3,3 В, а це означає, що для АТХ не потрібні вбудовані перетворювачі напруги, які часто виходять з ладу. У специфікацію АТХ були включені два додаткові роз'єми живлення, що одержали назву допоміжних силових роз'ємів (3,3 і 5 В), а також роз’єм ATX12V, використовуваний в системах, споживаючих більшу кількість електроенергії, чим передбачено оригінальною специфікацією.
• Переміщення процесора і модулів пам'яті. Змінені місця розташування цих пристроїв: тепер вони не заважають платам розширення, і їх легко замінити новими, не виймаючи при цьому жодного зі встановлених адаптерів. Процесор і модулі пам'яті розташовані поряд з джерелом живлення і обдуваються одним вентилятором, що дозволяє обійтися без спеціального вентилятора для процесора, який не завжди ефективний і часто схильний до поломок. Є також місце і для великого пасивного тепловідводу. Висота вільного простору, призначеного для установки процесора і тепловідводу, досягає приблизно 70 мм (2,8 дюйми).
• Успішніше розташування внутрішніх роз'ємів вводу-виводу. Ці роз'єми для накопичувачів на гнучких і жорстких дисках зміщені і знаходяться не під роз'ємами розширення або самими накопичувачами, а поряд з ними. Тому можна зменшити довжину внутрішніх кабелів до накопичувачів, а для доступу до роз'ємів не потрібно прибирати одну з плати або накопичувач.
• Поліпшене охолоджування. Процесор і оперативна пам'ять сконструйовані і розташовані так, щоб максимально поліпшити охолоджування системи в цілому. При цьому необхідність в окремому вентиляторі для охолоджування корпусу або процесора знижується (правда, не настільки, щоб відмовитися від нього зовсім). Додаткове охолодження все ще є насущною потребою більшої частини швидкодійних систем. Одна з особливостей оригінальної специфікації АТХ полягала у тому, що вентилятор блоку живлення направляє потік повітря всередину корпусу. Зворотний потік або схема нагнітання повітря приводить до підвищення тиску в корпусі, що перешкоджає проникненню бруду і пилу. Проте напрям потоку повітря в специфікації АТХ був переглянутий і перевага віддана вентилятору, що працює на видування, що приводить до пониження тиску повітря в корпусі. В цілому схема нагнітання повітря менш ефективна для охолоджування системи. І оскільки існуюча специфікація допускає практично будь-яку схему повітрообміну, більшість виробників поставляє блоки живлення АТХ в комплекті з вентиляторами, що відсмоктують повітря з системи або, кажучи інакше, з конструкцією негативного тиску.
• Зниження вартості. Конструкція АТХ не вимагає наявності гнізда кабелів до роз'ємів зовнішніх портів, що зустрічаються на системній платі Baby-AT, додаткового вентилятора для процесора і 3,3-вольтного стабілізатора на системній плати. У цій конструкції використовується один-єдиний роз'єм живлення. Крім того, ви можете укоротити внутрішні кабелі дискових накопичувачів. Все це істотно зменшує вартість не тільки системної плати, але і всього комп'ютера, включаючи корпус і джерело живлення.
На мал. 4.1 показано, як виглядає нова конструкція системи АТХ в настільному виконанні із знятою верхньою кришкою або у вертикальному з видаленою бічною панеллю. Зверніть увагу: системна плата практично не закривається відсіками для установки дисководів, що забезпечує вільний доступ до різних компонентів системи (таких, як процесор, модулі пам'яті, внутрішні роз'єми дисководів) і не заважає доступу до роз'ємів шини. Крім того, процесор розташований поряд з блоком живлення.
Системна плата АТХ, по суті, є конструкцією Baby-AT, переверненою на бік. Роз'єми розширення паралелі коротшій стороні і не заважають гніздам процесора, пам'яті і роз'ємам вводу-виводу. Окрім повнорозмірної схеми АТХ, компанія Intel описала конструкцію mini-АТХ, яка розміщується в такому ж корпусі. Повнорозмірна плата АТХ має розміри 305x244 мм (12x9,6 дюймів), а плата mini-ATX — 284x208 мм (11,2x8,2 дюймів).
34
Крім того, існують два зменшені варіанти системної плати АТХ, які носять назви Micro-ATX і flex-АТХ .
Мал. 4.1. Системна плата АТХ, встановлена в корпусі, розташовується таким чином, що гніздо процесора знаходиться поряд з вентилятором блоку живлення (і з вентилятором, вбудованим в корпус, якщо
такий існує)Не дивлячись на те що отвори в корпусі розташовуються так само, як і в Baby-AT, конструкції АТХ і Baby-AT
несумісні. Для джерел живлення необхідний змінний роз'єм, але основна конструкція джерела живлення АТХ аналогічна конструкції стандартного джерела живлення Slimline. Розміри материнських плат АТХ і mini-АТХ показані на мал. 4.2.
Мал. 4.2. Специфікація плати АТХ версії 2.03, співставляючи розміри плати АТХ і micro-ATXНе знімаючи кожух комп'ютера, можна визначити, чи має встановлена в ньому плата формфактор АТХ. Зверніть
увагу на задню панель системного блоку. АТХ має дві відмінні риси. По-перше, всі роз'єми плати розширення підключені безпосередньо до системної плати; немає ніякої виносної плати, як у LPX або NLX. Роз'єми перпендикулярні до площини системної плати. По-друге, плата АТХ має унікальну платформу подвоєної висоти для всіх вбудованих роз'ємів на системній платі (мал. 4.3).
Мал. 4.3. Типове розташування роз'ємів на плати АТХ (вигляд ззаду): А — клавіатура або миша PS/2, В — клавіатура або миша PS/2, З — порт USB 1, D — nopm USB, Е —
послідовний порт А, F — паралельний порт, G — послідовний порт В, Н — порт MIDI або ігровий (необов'язковий), I—лінійний вихід (необов'язковий), J—лінійний вхід
(необов'язковий), К—мікрофон (необов'язковий)
35

Вся необхідна інформація, що відноситься до специфікацій формфакторов АТХ, mini-АТХ, micro-ATX, flex-ATX або NLX, може бути одержана на Web-вузлі Form Factors (раніше Platform Developer), який знаходиться за адресою: http://www.formfactors.org. Web-вузол Form Factors надає специфікації формфакторів і технічні характеристики конструкцій системної плати, а також містить огляд нових технологій, дані по різних постачальниках і дискусійний форум.Micro-ATX
Формфактор системної плати micro-ATX був вперше представлений компанією Intel в грудні 1997 року як варіант зменшеної плати АТХ, призначений для невеликих і недорогих систем. Зменшення формфактора стандартної плати АТХ привело до зменшення розмірів корпусу, системної плати і блоку живлення і кінець кінцем до зниження вартості системи в цілому. Крім того, формфактор micro-ATX сумісний з формфактором АТХ, що дозволяє використовувати системну плату micro-ATX в повнорозмірному корпусі АТХ. Але вставити повнорозмірну плату АТХ в корпус micro-ATX, як ви розумієте, не можна. На початку 1999 року цей формфактор стрімко захопив ринок недорогих комп'ютерних систем. В даний час системи mini-tower домінують на ринку дешевих PC, не дивлячись на те що їх невеликі розміри і вузький корпус серйозно обмежують можливу модернізацію.
Системна плата формфакторів micro- ATX і ATX має наступні основні відмінності:• зменшена ширина (244 мм (9,6 дюйми) замість 305 мм (12 дюймів) або 284 мм (11,2 дюйми));• зменшене число роз'ємів;• зменшений блок живлення (формфактор SFX).
Максимальні розміри системної плати micro-ATX досягають всього лише 9,6x9,6 дюймів (244x244 мм) в порівнянні з повнорозмірною платою АТХ (12x9,6 дюймів, або 305x244 мм) або mini-ATX (11,2x8,2 дюймів, або 284x208 мм). Розміри системної плати можуть бути зменшені, якщо розташування її кріпильних отворів і роз'ємів відповідатиме промисловому стандарту. Зменшена кількість роз'ємів не складе проблеми для звичного користувача домашнього або офісного комп'ютера, оскільки деяка частина системних компонентів, до числа яких відносяться, наприклад, звукова і графічна плата, часто вбудовується в системну плату. Висока інтеграція компонентів зменшує вартість системної плати і відповідно всієї системи. Зовнішні роз'єми USB, 10/100 Ethernet, іноді SCSI або 1394 (FireWire) також можуть містити додаткові слоти розширення. Специфікація системної плати micro-ATX показана на мал. 4.4.
Мал. 4.4. Специфікація плати micro-ATX версії 1.0У системах micro-ATX завдяки відповідності роз'ємів з успіхом використовувався стандартний блок живлення
АТХ. Але, не дивлячись на це, спеціально для таких систем був розроблений зменшений формфактор блоку живлення, що одержав назву SFX. Зменшення розмірів блоку живлення, у свою чергу, дозволяє поліпшити компоновку елементів і відповідно зменшити в цілому розміри системи і споживану нею потужність. Але при використанні блоку живлення SFX можна зіткнутися з нестачею вихідної потужності для швидших або повністю конфігурованих систем. Споживана потужність сучасних систем істотно виросла, тому шасі більшої частини систем micro-ATX розроблене під стандартний блок живлення АТХ.
Сумісність плати micro-ATX з АТХ означає наступне:• викорисання одного і того ж 20-контактного роз'єму живлення;• стандартне розташування роз'ємів вводу-виводу;• однакове розташування кріпильних гвинтів.
Схожість геометричних параметрів дозволяє встановити системну плату micro-ATX як в корпус АТХ, що містить стандартний блок живлення, так і в зменшений корпус micro-ATX, що використовує менший за розмірами блок живлення SFX.
36
Загальні розміри системи micro-ATX достатньо малі. Типова система, створена на основі плати вказаного формфактора, має наступні розміри: висота 304,8 або 355,6 мм (12 або 14 дюймів), ширина 177,8 мм (7 дюймів), довжина 304,8 мм (12 дюймів), що відповідає корпусу класу micro-tower або desktop. Типова системна плата micro-ATX показана на мал. 4.5.
Мал. 4.5. Системна плата формфактора micro-ATXФормфактор micro-ATX був представлений на загальний розгляд компанією Intel фактично як промисловий
стандарт. Специфікації і інша інформація, що відноситься до формфактору micro-ATX, може бути одержана на Web-вузлі www. formfactors. org.Flex-ATX
У березні 1999 року Intel опублікувала доповнення до специфікації micro-ATX, назване flex-АТХ. У цьому доповненні описувалася системна плата ще меншого розміру, ніж АТХ, які дозволяють виробникам створювати невеликі і недорогі системи.
Формфактор flex-АТХ визначає системну плату, яка є якнайменшою з сімейства АТХ. Розміри цієї плати всього лише 229x191 мм (9,0x7,5 дюймів). На відміну від плати з формфактором micro-ATX, плата flex-ATX має менший розмір і підтримує процесори, для установки яких використовуються гнізда типа Socket— Socket 7 або Socket А для процесорів AMD, Socket 370 версії PPGA (Plastic Pin Grid Array) і FCPGA (Rip Chip PGA) для Intel Celeron і Pentium Ш, а також нове гніздо Socket 423 для Pentium 4. Плата flex-ATX не підтримує роз'ємів Slot 1, Slot 2 або Slot А, які служать для установки процесорів Pentium II/III і Athlon. Як ви знаєте, в своїх останніх розробках компанії Intel і AMD використовують процесори виключно конструкції Socket, тому їх несумісність з процесорами інших типів великої ролі не грає.
Системна плата flex-ATX відрізняється, як було вже сказано, меншими розмірами і підтримкою процесорів конструкції Socket. У іншому ж плата flex-ATX назад сумісна із стандартною платою АТХ, оскільки використовують єдине розташування кріпильних отворів, а також однакову специфікацію роз'ємів живлення і вводу-виводу.
У більшості систем flex-ATX найчастіше використовуються блоки живлення якнайменшого формфактора SFX, представленого в специфікації micro-ATX. В той же час, якщо дозволяють розміри корпусу, може використовуватися і стандартний блок живлення АТХ.
Таблиця 4.2. Розміри системної плати сімейства АТХ
Формфактор Максимальна ширина, мм (дюймів) Максимальна глибина, мм (дюймів)АТХ 305(12,0) 244(9,6)mini-ATX 284(11,2) 208 (8,2)micro-ATX 244(9,6) 244(9,6)flex-ATX 229(9,0) 191 (7,5)
Всі плати сімейства АТХ відрізняються стандартним розташуванням базових гвинтових отворів і роз'ємів, тобто системні плати mini-, micro- або flex-ATX можуть бути встановлені в будь-який корпус, що відповідає вимогам повнорозмірної плати АТХ. Зрозуміло, що плата mini-ATX або повнорозмірна плата АТХ не можуть бути встановлені в корпус меншого розміру, призначений для системної плати формфактора micro- або flex-ATX.
NLX
37

Конструкція NLX, представлена компанією Intel в листопаді 1996 року, стала формфактором корпоративних настільних систем Slimline. NLX є низкопрофільний формфактор, призначений для заміни раніше використовуваної нестандартної конструкції LPX. Численні удосконалення, що відрізняють формфактор NLX від конструкції LPX, дозволяють повною мірою використовувати самі останні технології у області системної плати. NLX — це поліпшена і, що саме головне, повністю стандартизована версія незалежної конструкції LPX.
Застосування системної плати LPX обмежене фізичними розмірами сучасних процесорів і відповідних їм тепловідводів, а також новими типами шин (наприклад, AGP). Ці проблеми були враховані при розробці формфактора NLX. Конструкція системної плати NLX також дозволяє розмістити здвоєний процесор Pentium Ш, встановлений в роз'єми Slot 1.
У формфакторі LPX додаткова вертикальна плата підключається до системної плати. Основна особливість системи NLX полягає у тому, що, на відміну від LPX, системна плата підключається до роз'єму вертикально розташованої додаткової плати. Подібна конструкція дозволяє витягнути системну плату без відключення вертикальної плати або підключених до неї адаптерів. Крім того, системна плата NLX не містить яких-небудь внутрішніх кабелів або підключених до неї роз'ємів. Пристрої, що звичайно підключаються до системної плати (кабелі дисковода, блоки живлення, індикаторні лампи лицьової панелі, роз'єми вимикачів і т.п.) підключені натомість до додаткової вертикальної плати. Використовуючи те, що основні роз'єми знаходяться на додатковій платі, можна зняти верхню кришку корпусу комп'ютера і без особливих зусиль витягнути системну плату, не відключивши при цьому жодного кабелю або роз'єму. Це дозволяє неймовірно швидко замінити системну плату.
Подібна конструкція має певні переваги для корпоративного ринку, де простота і легкість обслуговування є найважливішими критеріями оцінки. До її основних властивостей відноситься не тільки заміна компонентів "із швидкістю світла", але і висока взаємозамінність системної плати, джерел живлення і інших елементів. Нижче описані основні достоїнства цього нового стандарту.• Підтримка процесорних технологій настільних систем. Це особливо важливо для сучасніших процесорів,
збільшені розміри яких вимагають збільшення геометричних параметрів відповідних тепловідводів.• Гнучкість по відношенню до процесорних технологій, що швидко змінюються. Ідея гнучких систем з
об'єднувальною платою знайшла нове втілення в конструкції плати NLX, встановити які можна швидко і легко, не розбираючи при цьому всю систему на частини. На відміну від традиційних систем з об'єднувальною платою, новий стандарт NLX підтримують такі лідери комп'ютерної індустрії, як AST, Digital, Gateway, Hewlett-Packard, IBM, Micron, NEC і ін.
• Підтримка інших нових технологій. Тут йдеться про такі високопродуктивні рішення, як AGP (Accelerated Graphics Port), USB (Universal Serial Bus), технологія модулів пам'яті RIMM і DIMM.
• Швидкість і легкість обслуговування/ремонту. В порівнянні з іншими взаємозамінними формфакторами промислового стандарту системи NLX дозволяють значно понизити час, необхідний для заміни або обслуговування компонентів.
Мал. 4.9. Системна плата формфактора NLXВраховуючи неухильно зростаючу роль мультимедіа-програм, розробники вбудували в нову системну плату ще і
підтримку таких можливостей, як відтворення відеоданих, розширені засоби для обробки графіки і звуку. І якщо у минулому використання мультимедіа-технологій вимагало витрат на різну додаткову плату, то тепер необхідність в них відпала.
ЛОКАЛЬНІ ШИНИШини ISA, MCA і EISA мають один загальний недолік — порівняно низька швидкодія. Це обмеження існувало
ще за часів перших PC, в яких шина вводу-виводу працювала з тією ж швидкістю, що і шина процесора. Швидкодія шини процесора зростала, а характеристики шин вводу-виводу поліпшувалися в основному за рахунок збільшення їх розрядності. Обмежувати швидкодію шин доводилося тому, що більшість вироблених плат адаптерів не могли працювати при підвищених швидкостях обміну даними.
Деяким користувачам не дає спокою думка про те, що комп'ютер працює повільніше, ніж може. Проте швидкодія шини вводу-виводу в більшості випадків не потрібна. Наприклад, при роботі з клавіатурою або мишею висока швидкодія не потрібна, оскільки в цій ситуації продуктивність комп'ютера визначається самим користувачем. Воно дійсне необхідно тільки в підсистемах, де важлива висока швидкість обміну даними, наприклад у відеоконтроллерах і контроллерах дискових накопичувачів.
Проблема, пов'язана з швидкодією шини, стала актуальною у зв'язку з розповсюдженням графічних інтерфейсів користувача (наприклад, Windows). Ними обробляються такі великі масиви даних, що шина вводу-виводу стає
38

найвужчим місцем системи. Процесор з тактовою частотою, наприклад, 66 або 450 Мгц виявляються абсолютно некорисними, оскільки дані по шині вводу-виводу передаються у декілька разів повільніше (тактова частота близько 8 Мгц).
Очевидне розв’язання полягає в тому, щоб частина операцій по обміну даними здійснювалася не через роз'єми шини вводу-виводу, а через додаткові швидкодійні роз'єми. Якнайкращий підхід до розв’язання цієї проблеми — розташувати додаткові роз'єми вводу-виводу на самій швидкодійній шині, тобто на шині процесора.
Така конструкція одержала назву локальної шини (Local Bus), оскільки зовнішні пристрої (плати адаптерів) тепер мають доступ до шини процесора (найближчої до нього шини). Звичайно, роз'єми локальної шини повинні відрізнятися від слотів шини вводу-виводу, щоб в них не можна було вставити плату "повільних" адаптерів.
Цікаво, що перші 8- і 16-розрядні шини ISA мали архітектуру локальних шин. У цих системах як основна використовувалася шина процесора і всі пристрої працювали із швидкістю процесора. Коли тактова частота в системах ISA перевищила 8 Мгц, основна шина комп'ютера відділилася від шини процесора, яка вже не могла виконувати ці функції. Розширений варіант шини ISA, що з'явився в 1992 році, який називався VESA Local Bus (або VL-Bus), ознаменував повернення до архітектури локальних шин.
У сучасному настільному комп'ютері звичайно є роз'єми ISA, PCI і AGP. Проте згідно специфікації PC 99 в комп'ютерах повинні використовуватися тільки шини — PCI і AGP.
Шина PCIНа початку 1992 року Intel організувала групу розробників, перед якою була поставлена та ж задача, що і перед
групою VESA, — розробити нову шину, в якій були б усунені всі недоліки шин ISA і EISA.У червні 1992 року була випущена специфікація шини PCI версії 1.0, яка з тих пір зазнала декілька змін. Різні
версії PCI приведені в табл. 4.27.Таблиця 4.27. Специфікації PCI
Специфікація PCI
Дата випуску Основні зміни
PCI 1.0 Червень 1992г. Оригінальні 32/64-разрядная специфікацій PCI 2.0 Квітень 1993г. Певні з'єднувачі і плата розширення PCI 2.1 Червень 1995 р. Робоча частота 66 Мгц, порядок групових операцій, зміну часу затримок PCI 2.2 Січень 1999г. Управління режимом електроживлення, механічні зміни
Творці PCI відмовилися від традиційної концепції, ввівши ще одну шину між процесором і звичною шиною вводу-виводу. Замість того щоб підключити її безпосередньо до шини процесора, вельми чутливої до подібних втручань, вони розробили новий комплект мікросхем контроллерів для розширення шини.
PCI додає до традиційної конфігурації шин ще один рівень. При цьому звична шина вводу-виводу не використовується, а створюється фактично ще одна високошвидкісна системна шина з розрядністю, рівною розрядності даних процесора. Комп'ютери з шиною PCI з'явилися у середині 1993 року, і незабаром вона стала невід'ємною частиною комп'ютерів високого класу.
Тактова частота стандартної шини PCI рівна 33 Мгц, а розрядність відповідає розрядності даних процесора. Для 32-розрядного процесора пропускна здатність складає 132 Мбайт/с:
33 Мгц х 32 біт = 1 056 Мбіт/с; 1056 Мбіт/с : 8 = 132 Мбайт/с.Існує декілька різновидів стандартної шини PCI, вони представлені в табл. 4.28.В даний час 64-розрядні шини або шини з робочою частотою 66 і 133 Мгц використовуються тільки в
системних платах серверів або робочих станцій. Одна з основних переваг шини PCI полягає у тому, що вона може функціонувати одночасно з шиною процесора. Це дозволяє процесору обробляти дані зовнішньої кеш-пам'яті одночасно з передачею інформації по шині PCI між іншими компонентами системи.
Таблиця 4.28. Типи шин PCIТип шини PCI Розрядність,
біт Частота шини, Мгц
Цикли даних/такт
Швидкість передачі даних, Мбайт/с
PCI 32 33 1 133PCI 66 Мгц 32 66 1 26664-розрядна PCI 64 33 1 26664-розрядна PCI 66 Мгц 64 66 1 533PCI-X 64 133 1 1066
Для підключення адаптерів шини PCI використовується спеціальний роз'єм. Ці роз'єми легко розпізнати, оскільки вони звичайно встановлюються окремо від роз'ємів шин ISA, MCA або EISA (мал. 4.44). Плата PCI може бути тих же розмірів, що і плата для звичної шини вводу-виводу.
39
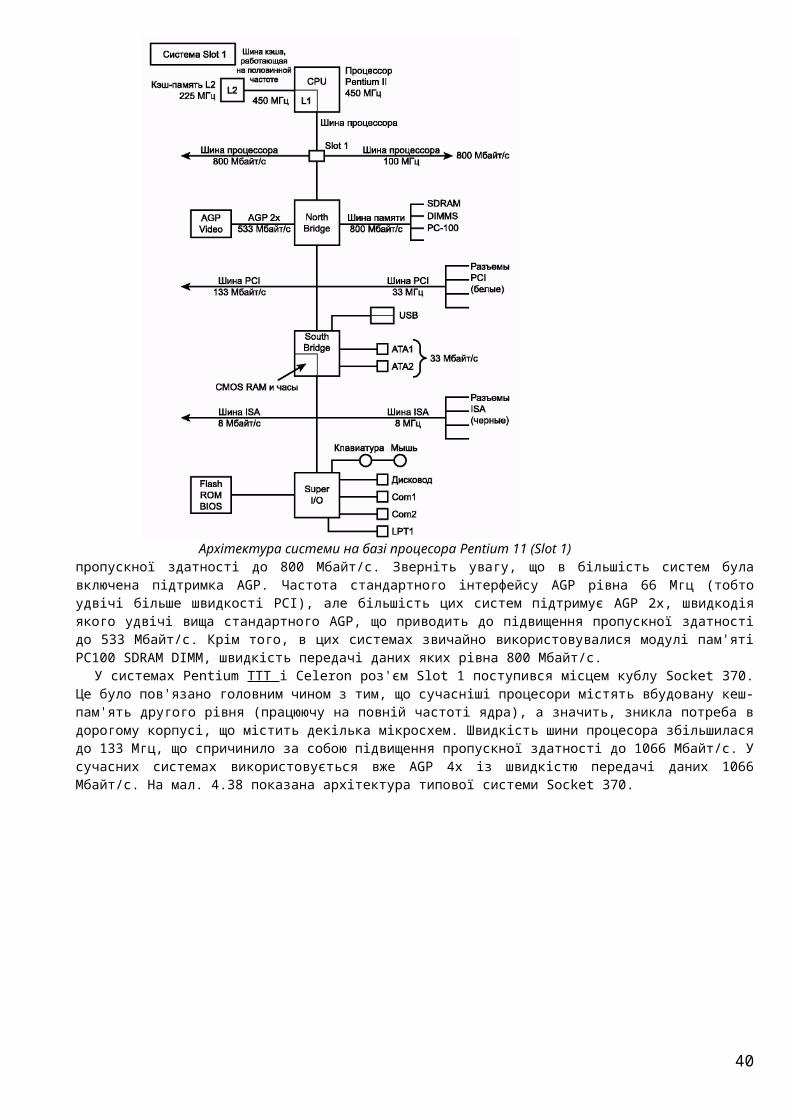
Мал. 4.44. Можливе розташування роз'ємів PCI щодо роз'ємів шин ISA і EISAСтандарт PCI пропонує три види плат для комп'ютерів різних типів і з різною напругою живлення. Плати з
напругою 5 В призначені для стаціонарних комп'ютерів, а з напругою 3,3 В — для портативних. Передбачені також універсальні адаптери і системна плата, яка може працювати в комп'ютерах обох типів.
Порівняти 32- і 64-розрядні варіанти стандартного роз'єму PCI (5 В) з 64-розрядним універсальним роз'ємом PCI допоможе мал. 4.45. На мал. 4.46 показане розташування виводів 64-розрядної універсальної плати PCI по відношенню до 64-розрядного роз'єму PCI.
Зверніть увагу, що універсальна плата PCI може встановлюватися в роз'єм, призначений для будь-якої плати з фіксованою напругою живлення. Якщо напруга, що подається на ті або інші контакти, може бути різною, то вона позначається +В I/O. На ці контакти подається опорна напруга, що визначає рівні вихідних логічних сигналів.
Іншою важливою властивістю плати PCI є те, що вона задовольняє специфікації Plug and Play компанії Intel. Це означає, що PCI не має перемичок і перемикачів і може настроюватися за допомогою спеціальної програми настройки. Системи з Plug and Play здатні самостійно настроювати адаптери, а в тих комп'ютерах, в яких ця система відсутня, але є роз'єми PCI, настройку адаптерів потрібно виконувати вручну за допомогою програми Setup BIOS. З кінця 1995 року в більшості комп'ютерів встановлюється BIOS, задовольняюча специфікації Plug and Play, яка забезпечує автоматичну настройку.
40

Мал. 4.45. Роз'єм 32-розрядної шини РС1 порівняно з роз'ємами 64-розрядної шини РС1 і 64-розрядної універсальної шини РС1
Мал. 4.46. 64-розрядна універсальна плата РС1 (вгорі) в порівнянні з роз'ємом 64-розрядної універсальної шини РС1 (внизу)
ПРИСКОРЕНИЙ ГРАФІЧНИЙ ПОРТ (AGP)Для підвищення ефективності роботи з відео і графікою Intel розробила нову шину— прискорений графічний
порт (Accelerated Graphics Port — AGP). AGP схожа на PCI, але містить ряд добавок і розширень. І фізично, і електрично, і логічно вона не залежить від PCI. Наприклад, роз'єм AGP подібний роз'єму PCI, але має контакти для додаткових сигналів і іншу розводку контактів. На відміну від PCI, яка є справжньою шиною з декількома роз'ємами, AGP — високоефективне з'єднання, розроблене спеціально для відеоадаптера, причому в системі для одного відеоадаптера допускається тільки один роз'єм AGP. Специфікація AGP 1.0 була вперше реалізована Intel в липні 1996 року. Відповідно до цієї специфікації використовувалася тактова частота 66 Мгц і режим 1х або 2х з рівнем напруги 3,3 В. Версія AGP 2.0 була випущена в травні 1998 року, в ній був доданий режим 4х, а також знижено робочу напругу до 1,5 В.
У новій специфікації AGP Pro визначений досить довгий роз'єм з додатковими контактами на кожному кінці для підведення напруги живлення до плати AGP, яка споживає більше 25 Вт (максимальна потужність — 110 Вт). Плата AGP Pro може використовуватися для високоякісних графічних робочих станцій. Роз'єми AGP Pro назад сумісні, тобто до них можна підключати стандартну плату AGP. Оскільки роз'єм AGP Pro довший від AGP 1х/2х, існує ймовірність неправильної установки плати AGP 1х/2х, що може привести до її пошкодження. Для того, щоб цього уникнути, розширення AGP Pro, розташоване в задній частині роз'єму, іноді закривається спеціальною кришкою. Перед установкою плати AGP Pro цю кришку слід видалити.
Стандартні роз'єми AGP lx/2x, AGP 4х і AGP Pro показані на мал. нижче. У серпні 2000 року була представлена остання версія специфікації AGP для PC — AGP 8x; у цій специфікації визначений швидший, 8-кратний (8х) режим передачі даних, дозволяючий значно збільшити її продуктивність.
AGP — швидкодійне з'єднання, що працює на основній частоті 66 Мгц (фактично — 66,66 Мгц), яка удвічі вища, ніж у PCI. У основному режимі AGP, названому 1х, виконується одиночна передача за кожен цикл. Оскільки ширина шини AGP рівна 32 бітам (4 байти), при 66 млн. тактів в секунду по ній можна передавати дані з швидкістю приблизно 266 млн. байт в секунду! У первинній специфікації AGP також визначений режим 2х, при якому в кожному циклі здійснюються дві передачі, що відповідає швидкості 533 Мбайт/с. В даний час практично вся сучасна системна плата підтримує цей режим.
Специфікація AGP 2.0 підтримує 4-кратний режим передачі даних, тобто передача даних здійснюється чотири рази протягом одного такту. При цьому швидкість передачі даних досягає 1066 Мбайт/с. Більшість сучасної плати
41

AGP підтримують, як мінімум, стандарт 4х. У табл. 4.29 приведені тактові частоти швидкості передачі даних для різних режимів AGP.
Параметри різних режимів AGP
Тип шини AGP
Розрядність, битий
Частота шини, Мгц
Цикли данных/такт
Швидкість передачі даних, Мбайт/с
AGP 32 66 1 266AGP2x 32 66 2 533AGP4X 32 66 4 1066AGP8X 32 66 8 2133
Оскільки шина AGP незалежна від PCI, при використанні відеоадаптера AGP можна звільнити шину PCI для виконання традиційних функцій вводу-виводу, наприклад для контроллерів IDE/ATA, SCSI або USB, звукової плати і ін.
Крім підвищення ефективності роботи відеоадаптера, AGP дозволяє діставати швидкий доступ безпосередньо до системної оперативної пам'яті. Завдяки цьому відеоадаптер AGP може використовувати оперативну пам'ять, що зменшує потребу у відеопам'яті. Це особливо важливо при роботі з тривимірними відеопрограмами, що інтенсивно використовують великі об'єми пам'яті.Шина PCI e (PCI EXpress).У 2005 році вбудовувані комп'ютерні технології виходять на новий революційний рівень. Нова шина PCI Express витісняє шину PCI, якій більш ніж 10 років. PCI Express (скорочено PCIe) - нова послідовна шина, яка скорочує необхідну площу і споживану потужність, збільшуючи при цьому пропускну здатність. Застосування PCIe у комп'ютерних прикладеннях поліпшить якість створюваного прикладення, зменшить його вартість і значно підвищить продуктивність. Незамінним це устаткування стане в прикладеннях, де викорисання нових периферійних пристроїв найбільш ефективне. Наприклад, в системах передачі даних і телекомунікаціях (Gigabit Ethernet/Firewire), в системах обробки 3D і «Frame-grabbing» (4 GB/сек по зустрічних каналах PCIe x16), а також в серверних рішеннях, що вимагають інтенсивного використання пам'яті, з RAID і SATA через PCIe. Переваги PCIe особливо значимі при спільній роботі Gigabit Ethernet (125 MB/сек) і ATA150 (150 MB/сек). Якщо пристрої обмінюються даними через шину PCI (133 MB/сек), то максимальна швидкість обміну даними (275 MB/сек) недосяжна. PCIе – рішення даної проблеми. Стандарт PCIе забезпечує швидкість 250 MB/сек в двох напрямах. PCIе — «канал», який має пропускну здатність в два рази більшу, в порівнянні з PCI, і може з'єднати ATA150 і Gigabit Ethernet без зниження продуктивності. Таблиця: Порівняльна характеристика PCIе і PCI
PCI PCIе (+1)Тип передачі даних Паралельна Послідовна
Швидкість передачі 133 МВ\сек «Half duplex»250 МВ\сек для кожного за принципом «Full duplex»
Смуга пропуску для вводу\виводу
Пристрої ділять смугу пропусканняЧерез Point-to-point, кожен пристрій одержує 100% смуги пропускання
Одночасна адресація для декількох пристроїв
Тільки із затримкою, відповідній роботі паралельних процесів
так
Гаряча заміна ні запланованоКрім того, декілька каналів можуть бути скомбіновані, даючи PCIe додаткове підвищення продуктивності. А слот PCIе х16 забезпечує максимальну швидкість до 4 GB/сек по кожному напряму. Це в 30 разів перевищує пропускну здатність PCI (133) MB/сек, і в 60 разів, при роботі в двох напрямах. Більш того, в майбутньому, PCIе карти матимуть нагоду здійснення гарячої заміни, що зробить їх ще зручнішими, і з'єднання між двома портами буде можливим напряму, завдяки «switch» технологіям. Таке рішення значно розвантажить процесор. Програмне забезпечення для PCIе сумісне з PCI, що спрощує розвиток нових пристроїв PCIе. Потенціал PCIе дозволить йому стати основним методом передачі даних для х86 систем.
42

PCIe-слоти
Стандартом визначені п'ять різних версій слотів (x1, x4, x8, x16 і, в майбутньому, x32). На перший погляд, це може привести до різноманіття форматів карт, але концепція розроблена таким чином, що будь-яка менша карта може бути встановлена в більший слот. Тому плата розробляється з максимальним розміром слота з наявних загальних рішень. З другого боку, виробники плати розширення можуть не турбуватися про свої розробки, якщо тенденція зміниться від поточних x1 слотів до x4 або x8 слотів. Слоти PCIe x1 і PCIe x16 вже доступні. PCI Express сокет варіанти в порівнянні з PCI і AGP x8x1 1 pair of lines по 250 MB/s на прийом і передачу данихPCI 32 розряди 125 MB/s в одному напряміx4 4 pairs of lines по 1 GB/s на прийом і передачу данихx8 8 pairs of lines по 2 GB/s на прийом і передачу данихx16 16 pairs of lines по 4 GB/s на прийом і передачу даних8x AGP 64 lines 2.1 GB/s в одному напряміx32 32 pairs of lines по 8 GB/s на прийом і передачу даних
ІНТЕРФЕЙС IDE.Основний інтерфейс, що використовується для підключення жорсткого диска до сучасного PC, називається IDE (Integrated Drive Electronics). Фактично він є зв'язком між системною платою і електронікою або контроллером, вбудованими в накопичувач. Цей інтерфейс постійно розвивається — на сьогоднішній день створено декілька модифікацій.Інтерфейс IDE, широко використовуваний в запам’ятовуючих пристроях сучасних комп'ютерів, розроблявся як інтерфейс жорсткого диска. Проте зараз він використовується для підтримки не тільки жорстких дисків, але і багатьох інших пристроїв, наприклад накопичувачів на магнітній стрічці, CD/DVD-ROM, дисководів Zip і ін. За час існування персональних комп'ютерів було розроблено декілька інтерфейсів. Нижче приведені типи інтерфейсів і період їх використовування.Інтерфейс Коли використовувався ST-506/412 1978-1989 рр. ESDI 1986-1991 рр. SCSI З 1986 р. по теперішній час IDE З 1988 р. по теперішній час Serial ATA З 2001 р. по теперішній час Існує три основні різновиди інтерфейсу IDE, розраховані на взаємодію з трьома стандартними шинами:• Serial AT Attachment (SATA);• паралельний AT Attachment (ATA) IDE (16-розрядна шина ISA);• XT IDE (8-розрядна шина ISA);• MCA IDE (16-розрядна шина MCA).В даний час зі всіх перерахованих типів використовуються тільки версії АТА. Вже з'явилися швидші і могутніші версії інтерфейсів АТА і Serial ATA; зокрема, поліпшені варіанти АТА одержали назву АТА-2 і далі. Іноді ці версії називають також EIDE (Enhanced IDE), Fast-ATA, Ultra-ATA або Ultra-DMA. Не дивлячись на всі можливості останньої версії ATА-6, в цілому інтерфейс Serial ATA демонструє велику продуктивність і функціональність.Стандарти ATAЯк вже згадувалося, стандарт АТА був прийнятий в березні 1989 року Комітетом із стандартів при ANSI. Для створення стандартів Serial ATA була сформована група, що одержала назву Serial ATA Workgroup, до якої увійшли багато фахівців Комітету із стандартів. Еволюція паралельного інтерфейсу АТА завершиться, ймовірно, останньою специфікацією АТА-6 (ATА/100), а надалі знайде своє втілення у формі Serial ATA (про що мова піде декілька пізніше).На даний момент були розглянуті і затверджені наступні стандарти АТА:• АТА-1 (1988-1994 рр.);
43

• АТА-2 (1996 р., також називається Fast-ATA, Fast-ATA-2 або EIDE);• АТА-3 (1997 р.);• АТА-4 (1998 р., також називається Ultra-ATA/33);• АТА-5 (1999 р., також називається Ultra-ATA/66);• АТА-6 (2000 р., також називається Ultra-АТА/100).Всі версії стандарту АТА назад сумісні, тобто пристрої АТА-1 або АТА-2 чудово працюватимуть з інтерфейсом АТА-4 або АТА-5. Кожен подальший стандарт АТА заснований на попередньому. Це означає, що стандарт АТА-5, наприклад, повністю повторює функціональні особливості АТА-6, за винятком деяких моментів. У табл. 7.1 представлені відомості про існуючі стандарти АТА, а їх докладніший опис приведений далі на чолі.Таблиця 7.1. Стандарти АТА
Стандарт Термін використовування
РЮ DMA UDMA Швидкодія, Мбайт/с
Властивості
АТА-1 1986-1994 рр. 0-2 0 8,33 АТА-2 1995-1996 рр. 0-4 0-2 16,67 Трансляція CHS/LBA для роботи з дисками
місткістю до 8,4Г6айт АТА-3 1997г. 0-4 0-2 16,67 Підтримка технологии S.M.A.R.T. АТА-4 1998г. 0-4 0-2 33,33 Режими Ultra-DMA, підтримка дисків місткістю до
137,4 Гбайт на рівні BIOS АТА-5 1999-2000 рр. 0-4 0-4 66,67 Режими Faster UDMA, новий 80-контактний кабель
з автовизначенням АТА-6 2001р. 0-4 0-5 0-5
100,00 Режим UDMA з швидкодією 100 Мбайт/с; підтримка дисків місткістю до 144Пбайт на рівні BIOS
SMART—Self-Monitoring, Analysis, and Reporting Technology.Пбайт — Петабайт; 1 Пбайт рівний 1 квадрильйону байт.CHS — Cylinder Head Sector.LBA — Logical Block Address.UDMA — Ultra DMA (Direct Memory Access).Роз'єм вводу-виводу АТАЩоб правильно підключити 40/44-контактний роз'єм інтерфейсу АТА, його як правило (але не завжди) забезпечують ключем. В даному випадку ключем служить зріз виводу 20, причому відповідний отвір у відповідь в частині відсутній. Всім виробникам рекомендується використовувати роз'єми і кабелі з ключами, оскільки при неправильному підключенні кабелю IDE можна вивести з ладу як контроллер, так і адаптер шини (і це дійсно так, хоча при моїх численних помилках дим з мікросхем все-таки не йшов).У портативних комп'ютерах для підключення 2,5-дюймового дисковода звичайно використовується зменшений уніфікований 50-контактний роз'єм, виводи якого розташовані на відстані 2 мм (0,079 дюйми) один від одного. Окрім основної 40-контактної частини, яка практично не відрізняється від стандартного роз'єму АТА (за винятком зменшеної відстані між виводами), існують також додаткові виводи живлення і перемичок. Звичайно для підключення до роз'єму використовується 44-контактний кабель, що передає силову напругу живлення і стандартні сигнали АТА. Статус жорсткого диска визначається положенням перемички, що є на ньому, або перемикача: первинний (Master), вторинний (Slave) або вибір кабелю (Select Cable). Уніфікований 50-контактний роз'єм, використовуваний для підключення 2,5-дюймових дисководів АТА, показаний на мал.
Підключення жорсткого диска ATA (IDE)
44

Зовнішній вигляд 40-контактного роз'єму інтерфейсу АТА
Схема уніфікованого 50-контактного роз'єму, використовуваного для підключення 2,5-дюймових дисководів АТАЗверніть увагу на виводи позицій A-D і видалені виводи позицій Е і F. Перемичка, використовувана для визначення статусу жорсткого диска, звичайно розташовується між контактами позицій В і D. Виводи 41 і 42 роз'єму служать для подачі живлення напругою 5 В до логічної схеми дисковода (на монтажну платню) і електродвигуна відповідно; висновок 43 заземлений (підключений до загального дроту); висновок 44 є резервним і в даній конструкції не використовується. Зверніть увагу, що в 2,5-дюймових дисководах, на відміну від дисководів більшого розміру, використовується електродвигун з робочою напругою 5 В.
Кабель вводу-виводу АТА.Для передачі сигналів між адаптером шини і жорстким диском (контроллером) призначений 40-контактний стрічковий кабель (мал. 7.4). Щоб по можливості не допускати спотворення форми сигналу, збільшення затримок і рівня перешкод, довжина кабелю не повинна перевищувати 46 см (18 дюймів).В даний час застосовується два типи кабелів — 40- і 80-жильні. У обох використовуються 40 контактні роз'єми, а решта провідників в 80-жильному кабелі заземлена. Таке конструктивне рішення дозволяє понизити рівень перешкод у високошвидкісних інтерфейсах UltraATA/66 або UltraDMA/66. Новий 80-жильний кабель назад сумісний з 40-жильним, так що краще використовувати саме цей тип кабелю, причому незалежно від інтерфейсу встановленого накопичувача.
Інтерфейс АТАРI (ATA Packet Interface)Даний інтерфейс був розроблений для того, щоб накопичувачі на магнітній стрічці, CD-ROM і інші пристрої можна було підключати до звичного IDE-роз'єму. Основна перевага пристроїв, виконаних в стандарті ATAPI, — це їх дешевизна і можливістьСпецифікації режимів Ultra-DMAРежим Ultra- DMA
Час циклу, не Коефіцієнт передачі даних, Мбайт/с Специфікація
0 240 16,67 АТА-4, Ultra-ATA/33 1 160 25,00 АТА-4, Ultra-ATA/33 2 120 33,33 АТА-4, Ultra-ATA/33
45
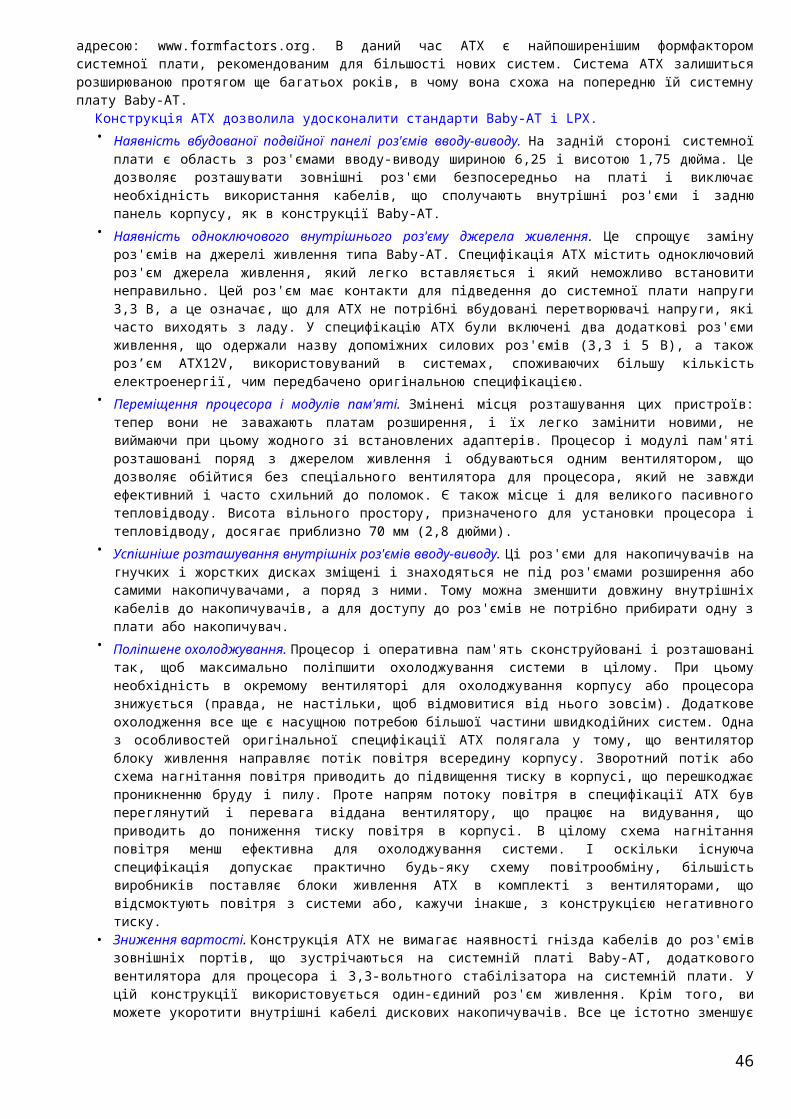
3 90 44,44 АТА-5, Ultra-ATA/66 4 60 66,67 АТА-5, Ultra-ATA/66 5 40 100 АТА-6, Ultra-ATA/100 підключення до вже встановленого адаптера. Що стосується накопичувачів CD-ROM, то вони використовують ресурси центрального процесора набагато рідше, ніж аналогічні пристрої, підключені до спеціальних адаптерів; але вони не дають виграшу в швидкодії. А ось швидкодія і надійність накопичувачів на магнітній стрічці може істотно зрости, якщо їх підключити до інтерфейсу ATAPI, а не до контроллерів дисководів на гнучких дисках. Хоча накопичувачі CD-ROM і підключаються до інтерфейсу жорсткого диска, це зовсім не означає, що з позицій системи вони виглядають як звичні жорсткі диски. Навпаки, з погляду програмного забезпечення вони нагадують пристрої SCSI.У базовій системі вводу-виводу деяких систем безпосередньо не передбачена підтримка ATAPI. Системи без підтримки ATAPI в базовій системі вводу-виводу не можуть завантажуватися з компакт-диска ATAPI, оскільки заздалегідь потрібно завантажити драйвер. У Windows 95/NT вбудована підтримка інтерфейсу ATAPI, а багато версій BIOS дозволяють виконувати завантаження системи з ATAPI-накопичувача CD-ROM. Це значно спрощує інсталяцію таких систем, як Windows 98 або Windows 2000.Крім того, рекомендовано встановлювати різні типи пристроїв IDE на різні канали. Річ у тому, що деякі старі набори мікросхем системної логіки не підтримують різних швидкостей передачі, а це означає, що канал доводиться настроювати на швидкість найповільнішого пристрою. Оскільки в порівнянні з жорстким диском накопичувачі на магнітній стрічці і дисководи компакт-дисків працюють в більш низькошвидкісних режимах IDE, жорсткий диск, приєднаний до одного з ними кабелю, працюватиме повільніше, ніж дозволяють його можливості. Але навіть якщо набір мікросхем системної логіки підтримує різні швидкості передачі даних, рекомендую підключати до пристроїв окремі кабелі, оскільки IDE, на відміну від SCSI, звичайно не допускає (тимчасового) перекриття операцій доступу. Іншими словами, коли один диск виконує команди, до іншого не можна добратися.
46
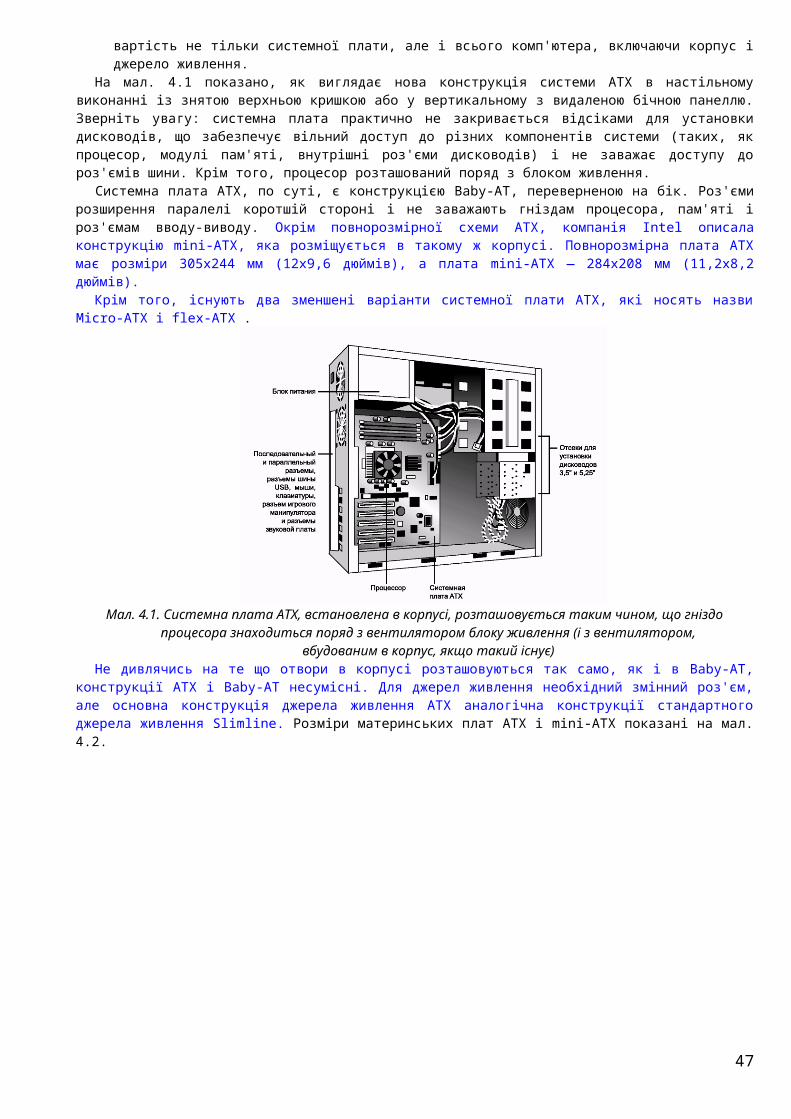
ІНТЕРФЕЙС SERIAL ATA.З появою стандарту АТА-6 могло показатися, що використовуваний більше 10 років паралельний інтерфейс АТА вже виходить з гри. Передача даних, здійснювана по плоскому кабелю із швидкістю більше 100 Мбайт/с, породжує безліч проблем, пов'язаних з синхронізацією сигналу і електромагнітним випромінюванням. Їх рішенням став новий послідовний інтерфейс ATA (Serial ATA), що прийшов на зміну паралельному інтерфейсу фізичних накопичувачів. Serial ATA назад сумісний на програмному рівні, тобто раніше використовуване програмне забезпечення взаємодіє з новою архітектурою без яких-небудь обмежень. Іншими словами, існуюча базова система вводу-виводу, операційні системи і утиліти, що працюють з паралельним АТА, так само працюватимуть і з послідовним інтерфейсом. Serial ATA підтримує всі існуючі пристрої АТА і ATAPI, до числа яких входять дисководи CD-ROM, CD-RW і DVD, накопичувачі на магнітній стрічці, дисководи SuperDisk, а також накопичувачі інших типів, підтримувані в даний час паралельним АТА.Існують, звичайно, певні фізичні відмінності: не можна, наприклад, підключити дисководи стандарту АТА до хост-адаптерів послідовного інтерфейсу АТА або навпаки. У Serial ATA використовуються вужчі 7-контактні кабелі, що дозволяють спростити схему підключення системних компонентів і зменшити габарити кабельних роз'ємів. Конструкція мікросхеми Serial ATA відрізняється зменшеною кількістю контактів і зниженою напругою живлення. Всі ці зміни дозволили уникнути багатьох проблем, характерних для паралельного інтерфейсу АТА.Очевидно, що через деякий час Serial ATA (SATA), як фактичний стандарт внутрішніх накопичувачів, повністю замінить паралельний інтерфейс АТА. Перехід від стандартів АТА до SATA здійснюватиметься поступово, причому можливостями інтерфейсу АТА можна буде скористатися протягом всього часу переходу. У лютому 2000 року відбувся офіційний Форум розробників Intel, на якому було оголошено про створення спеціальної робочої групи, розробкою стандарту Serial ATA, що займається. Першими членами цієї групи стали компанії APT Technologies, Dell, IBM, Intel, Maxtor, Quantum і Seagate. В даний час група налічує більше 60 компаній з різних галузей промисловості. У листопаді 2000 року була завершена перша специфікація Serial АТА 1.0, яку можна одержати на Web-вузлі Serial ATA Working Group (http: / /www. ser ialata. org).Послідовний інтерфейс АТА одноразово передає тільки один біт даних. У інтерфейсі використовується вузький 7-жильний кабель з ключовими роз'ємами шириною не більш 14 мм (0,55 дюйми) на кожному кінці. Подібна конструкція дозволяє уникнути проблем з циркуляцією повітря, виникаючих при використовуванні ширших плоских кабелів стандарту АТА. Слід помітити, що роз'єми знаходяться тільки на кінцях кабелів. Кабелі, у свою чергу, використовуються для з'єднання пристрою безпосередньо з контроллером (звично на системній платні). У послідовному інтерфейсі перемички головний/підлеглий не використовуються, оскільки кожен кабель підтримує тільки один пристрій. Кінці кабелю абсолютно однакові, тобто роз'єм системної плати і роз'єм під'єднуваного пристрою практично не відрізняються. Максимальна довжина кабелю SATA досягає одного метра (39,37 дюйми), що значно більше 18-дюймового максимуму для паралельного інтерфейсу АТА. Швидкість передачі даних послідовного інтерфейсу, що використовує вужчий, довший і менш дорожчий кабель, рівна 150 Мбайт/с (у півтора рази більше швидкості передачі паралельного AT А/100). В майбутньому ця швидкість збільшиться до 300 або навіть 600 Мбайт/с.
Тип Serial АТА Ширина шини, битий Частота шини, Мгц
Число циклів даних за такт
Пропускна спроможність, Мбайт/с
SATA-150 1 1500 1 150 SATA-300 1 3000 1 300 SATA-600 1 6000 1 600
ІНТЕРФЕЙС SCSI (Small Computer System Interface).Інтерфейс малих комп'ютерних систем, або SCSI, не дисковий, а системний. Це не черговий різновид
контроллера, це шина, яка може забезпечити роботу восьми або шістнадцяти пристроїв. Деякі адаптери дозволяють підключити і більше пристроїв.
Один з пристроїв, що називається основним (host) адаптером, виконує роль зв'язуючої ланки між шиною SCSI і системною шиною персонального комп'ютера. Шина SCSI взаємодіє не з самими пристроями (наприклад, з жорсткими дисками), а з вбудованими в них контроллерами.
Як вже згадувалося, шина SCSI може забезпечити роботу 8 або 16 підключених до неї модулів, кожному з яких привласнюється ідентифікаційний номер — SCSI ID. Один з модулів є платою адаптера, встановленою в комп'ютері; інші сім — периферійними пристроями. До одного і того ж основного адаптера можна підключати жорсткі диски, накопичувачі на магнітній стрічці, CD-ROM, сканери і інші пристрої (не більше семи або п'ятнадцяти). Оскільки в більшості комп'ютерів можна встановлювати до чотирьох основних адаптерів, а до кожної шини SCSI можна підключати до 15 периферійних пристроїв, та загальна кількість пристроїв може досягати 60! Більш того, існують також двохканальні адаптери, що дозволяють подвоїти це число.
SCSI є швидким інтерфейсом, чудово відповідним для високопродуктивних робочих станцій, серверів або яких-небудь інших систем, яким життєво необхідний ефективний інтерфейс для пристроїв зберігання даних. Остання версія інтерфейсу Ultra4 (Ultra320) SCSI підтримує швидкість передачі даних до 320 Мбайт/с.
Купуючи жорсткий диск SCSI, ви насправді купуєте відразу три пристрої: власне жорсткий диск, контроллер і адаптер SCSI. По суті, більшість дисків SCSI є жорсткими дисками IDE з вбудованим адаптером шини SCSI. Але ви можете абсолютно не цікавитися типом контроллера, встановленого в жорсткому диску. Безпосередньо до нього комп'ютер звернутися не може, як це відбувається при підключенні звичного контроллера до системної шини. Взаємодія з пристроями SCSI здійснюється через основний адаптер, встановлений в роз'єм системної шини, тому звернутися до жорсткого диска можна тільки відповідно до протоколу SCSI.
47

Стандарти SPI (SCSI Parallel Interface)Стандарт SCSI-3
Поширена назва Відповідає технології Реальна швидкість, Мбайт/с
SPI Ultra SCSI Fast-20 20/40 SPI-2 UItra2SCSI Fast-40 40/80 SPI-3 Ultra3 SCSI Fast-80DT 160 SPI-4 UItra4SCSI Fast-160DT 320
У деяких компаніях стандарт SPI-3 (UltraS SCSI) носить назву Ultral60 або Ultral60+, а стандарт SPI-4 (Ultra4 SCSI) — Ultra320 або Ultra320+. Назва Ultral 60/320 відноситься до будь-якого пристрою, який включає перші три з п'яти основних можливостей специфікації Ultra3/4 SCSI. Назва Ultral60/320+ указує, що даний пристрій підтримує всі п'ять основних властивостей специфікації.
При спільній роботі адаптерів стандарту SCSI-1 і периферійних пристроїв стандарту SCSI-2 проблем з сумісністю не виникає. Як вже наголошувалося, практично будь-який пристрій, що відповідає вимогам стандарту SCSI-1, можна вважати відповідним SCSI-2 (і навіть SCSI-3). Звичайно, в цих пристроях не передбачено швидкого обміну даними і збільшення розрядності шини, але через контроллер SCSI-1 можна передавати всі додаткові команди, визначені в SCSI-2. Іншими словами, особливої різниці між сумісними пристроями стандартів SCSI-1 і SCSI-2 немає.Кабелі і роз'єми SCSI
Стандарт SCSI пред'являє досить жорсткі вимоги до кабелів і роз'ємів. Для внутрішньосистемних з'єднань використовується 50-контактний неекранований роз'єм, а для зовнішніх— аналогічний екранований роз'єм типа Centronics (з фіксатором). У офіційній документації екранований роз'єм іноді називають Alternative 2. Для однодротяної і диференціальної шин передбачене як пасивне, так і активне навантаження ліній (активна переважно) . 50-контактний кабель стандарту SCSI називається кабелем типу А.
У старих 8-розрядних адаптерах і зовнішніх пристроях SCSI використовується роз'єм типа Centronics. На мал. 8.4 показаний зовнішній вигляд 50-контактного роз'єму.
Мал. 8.4. Зовнішній вигляд 50-контактного роз'єму SCSI (Alternative 2)У стандарті SCSI-2 кабелі типу А можуть закінчуватися також 50-контактними роз'ємами типа D із зменшеним
кроком висновків. Такі роз'єми іноді називають Alternative 1. Зовнішній вигляд цього роз'єму показаний на мал. 8.5.
Мал. 8.5. Зовнішній вигляд 50-контактного роз'єму SCSI (Alternative I)Роз'єм Alternative 2 типа Centronics дістався SCSI-2 від попередньої версії. Для 16- і 32-розрядних шин в стандарті
SCSI-2 передбачений 68-контактний кабель В, який повинен підключатися одночасно з кабелем А. Однако кабель В не одержав широкого визнання і із стандарту SCSI-3 виключений.
Замість нещасливого кабелю У в стандарті SCSI-3 з'явився 68-контактний кабель Р. На обох кабелях (типів А і Р) можуть бути змонтовані або екрановані, або неекрановані роз'єми типа D. Вони повинні бути забезпечені фіксаторами-клямками, а не дротяними кільцями, як роз'єми Centronics. Для кращої перешкодозахисної навантаження ліній в однодротяних шинах повинне бути активним. На мал. 8.6 показаний 68-контактний роз'єм.
Мал. 8.6. Зовнішній вигляд 68-контактного роз'єму SCSIУ масивах накопичувачів використовується 80-контактний роз'єм, званий Alternative 4. Накопичувачі з таким
роз'ємом підтримують "гаряче" підключення пристроїв, тобто пристрої SCSI можна підключати і відключати при включеному живленні. На мал. 8.7 показаний 80-контактний роз'єм.
Мал. 8.7. Зовнішній вигляд 80-контактного роз'єму SCSI (Alternative 4)Компанія Apple і деякі інші виробники пристроїв SCSI використовують 25-контактний кабель. Роз'єм цього кабелю
аналогічний роз'єму паралельного порту PC. При неправильному підключенні пристрій SCSI або системна плата можуть вийти з ладу. Якщо ж ви використовуєте такий кабель, то помітьте його якимсь чином (наприклад, поставте кольорові мітки на всі роз'єми пристроїв SCSI). А взагалі краще не використовувати цей тип кабелю. На мал. 8.8 показаний 25-контактний роз'єм.
48

Мал. 8.8. Зовнішній вигляд 25-контактного роз'єму SCSIКрайові навантаження
Дуже важливо правильно встановити крайові навантаження на шині SCSI. Для неї передбачені наступні типи крайових навантажень:• пасивні;• активні (також звані Alternative 2);• Forced Perfect Termination (FPT): FPT-3, FPT-18 і FPT-27;• High Voltage Differential (HVD);• Low Voltage Differential (LVD).
Перші три типи навантажень застосовуються тільки в асиметричних шинах SCSI. Для управління крайовими навантаженнями шини використовується пасивна мережа резисторів опором 220 або 330 Ом. Пасивні крайові навантаження повинні застосовуватися тільки у вузьких (8-розрядних) шинах SCSI, що працюють з частотою 5 Мгц. Як правило, пасивні резистори навантажень задовольняють вимогам передачі сигналу на короткі відстані, наприклад на 0,5-1 м, але для довших відстаней краще використовувати активні крайові навантаження відповідно до стандарту Fast SCSI.Конфігурація дисків SCSI
Настроювати диски SCSI нескладно, і ця процедура обумовлена стандартом SCSI. Для настройки жорсткого диска слід належним чином встановити ідентифікатор (адреса) SCSI ID (від 0 до 7 або від 0 до 15) і (при необхідності) резистори навантажень.
Встановити ідентифікатор SCSI ID дуже просто. До однієї шини SCSI можна підключити до восьми пристроїв, і у кожного з них повинна бути унікальна адреса — SCSI ID. Одна адреса відводиться для основного адаптера, а інші сім призначені для периферійних пристроїв. Більшості основних адаптерів при заводській настройці привласнюється адреса з вищим пріоритетом — ID 7. Решта пристроїв повинна мати різні адреси ID, інакше конфлікти між ними неминучі. У деяких основних адаптерах передбачається завантаження системи тільки з жорсткого диска, якому привласнена конкретна адреса ID. У старих адаптерах компанії Adaptec у завантажувального диска повинна бути адреса ID 0, а в нових він може бути будь-яким.
Ідентифікатор SCSI ID звичайно указують за допомогою перемичок, встановлених безпосередньо в жорсткому диску. Якщо жорсткий диск зібраний в окремому корпусі, то іноді на його задній стінці можна знайти перемикач вибору SCSI ID. Він може бути кнопковим, поворотним і т.д. Якщо зовнішнього перемикача немає, доведеться зняти з нього кришку і встановити адресу ID за допомогою перемичок, розташованих на платні жорсткого диска.
Для установки SCSI ID потрібні три перемички; річ у тому, що кожен конкретний ID визначається положенням цих перемичок, яке відповідає деякому двійковому числу. Наприклад, якщо розімкнути всі три перемички (тобто встановити їх в положення Off— відключено), то це відповідатиме двійковому числу ОООb, при цьому значення ID буде рівне 0. Якщо ж положення перемичок відповідає двійковому числу 001b, то ID буде рівний 1 (аналогічно для числа 010 ID рівний 2, для 011b — 3 і т.д.). Три перемички потрібні тому, що для представлення числа 7 (максимальної адреси ID) необхідно три двійкові розряди. Нагадаємо, що в двійковому представленні 0=000b, l=001b, ..., 7=1 lib, де b означає, що число є двійковим.
На жаль, в різних жорстких дисках перемички можуть бути розташовані по-різному: старший розряд може виявитися як зліва, так і справа. У табл. 8.7 і 8.8 явно вказані можливі положення перемичок. Перша таблиця відповідає випадку, коли старший розряд знаходиться зліва, а друга — коли він розташований справа.
Шина SCSI завжди повинна бути навантажена з обох кінців. Якщо основний адаптер розташований на одному з кінців шини, то в ньому повинні бути встановлені резистори навантажень. Якщо він розташований у середині ланцюжка, а до обох її кінців підключені периферійні пристрої, то модуль навантаження в адаптері повинен бути відключений, а в периферійних пристроях на кінцях повинні бути встановлені модулі навантаження. Ці модулі бувають різних типів, але рекомендований на сьогоднішній день мінімум — це активні модулі, а ще краще — пристрої типа FPT.Таблиця 8.7. Установка перемичок SCSI ID (старший розряд зліва)SCSI Положення перемичок 0 0 0 0 1 0 0 1 2 0 1 0 3 0 1 1 4 1 0 0 5 1 0 1 6 1 1 0 7 1 1 1 1 — перемичка замкнута (встановлена в положення "On" — включено). Про — перемичка розімкнена (встановлена в положення "Off" — відключено).Таблиця 8.8. Установка перемичок SCSI ID (старший розряд справа)SCSI Положення перемичок 0 0 0 0
49

1 1 0 0 2 0 1 0 3 1 1 0 4 0 0 1 5 1 0 1 6 0 1 1 7 1 1 1 Щоб одержати працездатну систему SCSI, використовуйте кращі модулі навантаження з тих, що є у вашому розпорядженні, і підключайте їх до обох кінців шини. Більшість проблем при використовуванні інтерфейсу SCSI виникає через погане навантаження шини. У одних пристроях модулі навантаження вбудовані і їх можна відключати шляхом перестановки перемичок, а в інших таких модулів немає, тобто необхідно використовувати зовнішні резистори навантажень.
На корпусі зовнішнього пристрою SCSI звичайно встановлюється два роз'єми — вхідні і вихідні, що дозволяє включати його як ланку послідовного ланцюжка. Якщо пристрій опиняється в такому ланцюжку останнім, то до його вихідного порту SCSI потрібно підключити зовнішній модуль навантаження (мал. 8.14).
Існує декілька конструкцій зовнішніх резисторів навантажень, у тому числі і конструкція прохідного модуля. Такий модуль може знадобитися, якщо для навантаження і підключення кабелю доводиться використовувати один і той же роз'єм, а також при внутрішньосистемних підключеннях пристроїв SCSI, у яких немає вбудованих модулів навантаження.
Ланцюжок пристроїв SCSI; до першого і останнього пристрою повинні бути підключені резистори навантаженьЗокрема, вони потрібні при внутрішній установці більшості жорстких дисків, оскільки для економії місця на платні
управління вбудовані модулі навантаження на них не встановлюються.Прохідні модулі (мал. 8.15) необхідні в тому випадку, якщо пристрій підключений до кінця шини і є тільки один
роз'єм для підключення пристрою SCSI.На диску SCSI можуть бути встановлені додаткові перемички для вибору наступних робочих режимів:
• запуск по команді (запуск із затримкою);• контроль парності;• подача постійної напруги на модуль навантаження;• режим синхронізації.Запуск по команді (запуск із затримкою)
Якщо в системі встановлено декілька жорстких дисків, то бажано набудувати їх так, щоб при включенні комп'ютера вони запускалися по черзі. Річ у тому, що протягом декількох секунд після включення, поки диски розкручуються до своєї номінальної частоти обертання, жорсткий диск споживає в Зараза більшу потужність, ніж при звичній роботі. Одночасний запуск всіх жорстких дисків може привести до перевантаження блоку живлення і спрацьовування захисту, внаслідок чого комп'ютер зависатиме або при кожному включенні, або епізодично.
Щоб подібних проблем не виникало, майже у всіх дисках SCSI передбачена можливість затримки запуску двигуна. Коли основний адаптер ініціалізує шину SCSI, на неї, зокрема, послідовно за всіма адресами ID видається команда запуску пристрою (Start Unit). Встановивши відповідну перемичку в жорсткому диску, можна затримати початок розкручування дисків до отримання команди Start Unit від основного адаптера. Оскільки вказана команда за всіма адресами ID передається послідовно, починаючи з пристрою з вищим пріоритетом (ID 7) і закінчуючи пристроєм з нижчим пріоритетом (ID 0), таким же буде і порядок запуску жорстких дисків. У деяких основних адаптерах видача команди Start Unit не передбачена; в цьому випадку жорсткі диски не будуть її чекати, а через декілька секунд запустяться самостійно.
50

Модуль навантаження для зовнішнього пристрою SCSI
Прохідний модуль навантаження для внутрішнього устрою SCSI
Порти вводу-виводуОсновними засобами комунікації, використовуваними в PC, є послідовні і паралельні порти. До послідовних портів
частіше підключаються двонаправлені пристрої, які повинні як передавати інформацію в комп'ютер, так і приймати її. Послідовні порти, паралельні порти, універсальна послідовна шина (Universal Serial Bus— USB), IEEE-1394 (i.Link або FireWire)— все це інтерфейси вводу-виводу.
Паралельні порти звичайно використовуються для підключення принтерів і працюють в однонаправленому режимі, хоча можуть застосовуватися і як двонаправлені. Деякі виробники випускають програми, призначені для організації високошвидкісної передачі даних між комп'ютерами через послідовні або паралельні порти. Версії цих програм передачі файлів були включені ще в DOS версії 6.0 і вище (Interlink) і в Windows 9x. Існують версії мережевих адаптерів, накопичувачів на магнітній стрічці, сканерів, дисководів для гнучких дисків і CD-ROM, які також підключаються до паралельних портів.
Задачі, традиційно виконувані послідовними або паралельними портами, в даний час поступово переходять до портів новіших типів, на зразок USB або IEEE-1394. Проте традиційні порти все ще залишаються одними з найважливіших інтерфейсів вводу-виводу.
Послідовні портиАсинхронний послідовний інтерфейс — це основний тип інтерфейсу, за допомогою якого здійснюється взаємодія між
комп'ютерами. Термін асинхронний означає, що при передачі даних не використовуються ніякі синхронізуючі сигнали і окремі символи можуть передаватися з довільними інтервалами, як, наприклад, при введенні даних з клавіатури.
Кожному символу, передаваному через послідовне з'єднання, повинен передувати стандартний стартовий сигнал, а завершувати його передачу повинен стоповий сигнал. Стартовий сигнал — це нульовий біт, званий стартовим бітом. Він повинен повідомити приймаючий пристрій про те, що наступні вісім бітів є байтом даних. Після символу передаються один або два стопові біти, що сигналізують про закінчення передачі символу. У приймаючому пристрої символи розпізнаються по появі стартових і стопових сигналів, а не по моменту їх передачі. Асинхронний інтерфейс орієнтований на передачу символів (байтів), а при передачі використовується приблизно 20% інформації тільки для ідентифікації кожного символу.
Термін послідовний означає, що передача даних здійснюється по одиночному провіднику, а біти при цьому передаються послідовно, один за іншим. Такий тип зв'язку характерний для телефонної мережі, в якій кожен напрям обслуговує один провідник.
Розташування послідовних портівТипові системи включають один або два послідовні порти, що розташовуються звично на задній панелі системного
блоку. Існують також комп'ютери, створені з врахуванням споживацьких вимог, які містять послідовний порт цифрової камери, розташований на передній панелі. Цей порт використовується для передачі даних з цифрових камер нижчого класу.
51

У сучасних конструкціях системної плати для управління вбудованими послідовними портами цього типу використовується мікросхема Super I/O, розташована на системній плати, або високоінтегрована мікросхема South Bridge.
Для того, щоб збільшити кількість послідовних портів, що є в стандартній системі, необхідно придбати одно- або багатопортову плату або так звану інтерфейсну плату вводу-виводу (multi-I/O card) , що містить один або два послідовних, а також один або два паралельні порти. Послідовні порти старих систем, створених на основі стандартів ISA або VL-Bus, часто підключалися до багатофункціональної плати, що містить інтерфейси жорсткого диска IDE і накопичувача на гнучких дисках.
Зверніть увагу на те, що модеми, розміщені на плати, також включають вбудований послідовний порт. На мал. нижче показаний стандартний 9-контактний роз'єм, використовуваний багатьма сучасними зовнішніми послідовними портами. А також показана первинна версія стандартного 25-контактного роз'єму.
До послідовних портів можна підключити найрізноманітніші пристрої: модеми, плоттери, принтери, сканери, інші комп'ютери, пристрої прочитування штрих-коду або схему управління пристроями. В основному у всіх пристроях, для яких необхідний двонаправлений зв'язок з комп'ютером, використовується послідовний порт RS-232C (Reference Standard number 232 revision С — стандарт обміну номер 232 версії С), що став стандартом, який дозволяє передавати дані між несумісними пристроями.У офіційних технічних вимогах рекомендується максимальна довжина кабелю не більш 15 м. Обмежуючим чинником є повна ємність кабелю і вхідних контурів інтерфейсу. Максимальна ємність визначена як 2500 пФ. Спеціально розроблені кабелі з малою ємністю, їх довжина може досягати 150 м і більше. Є також драйвери лінії (підсилювачі (репітери)), які дозволяють ще більше збільшити довжину кабелю.
Призначення виводів роз'ємів послідовних портів приведені в табл. 17.1 і 17.2, а відповідність виводів між 9- і 25-
контактним роз'ємами — в табл. 17.3.Таблиця 17.1. Призначення виводів 9-контактного (AT) роз'єму послідовного портуВивід Сигнал Опис Тип виводу
1 CD Виявлення несучого сигналу Вхід 2 RD Дані, що приймаються Вхід 3 TD Передавані дані Вихід 4 DTR Готовність терміналу Вихід 5 SG Загальний сигнал - 6 DSR Готовність даних до передачі Вхід 7 RTS Запит передачі Вихід 8 CTS Готовність зовнішнього пристрою до прийому Вхід 9 RI Індикатор виклику Вхід
Таблиця 17.2. Призначення висновків 25-контактного (PC, XT і PS/2) роз'єму послідовного порту
Вивід Сигнал Опис Тип виводу1 - Корпус - 2 TD Передавані дані Вихід 3 RD Дані, що приймаються Вхід 4 RTS Запит передачі Вихід 5 CTS Готовність зовнішнього пристрою до прийому Вхід 6 DSR Готовність даних до передачі Вхід 7 SG Загальний сигнал - 8 CD Виявлення несучого сигналу Вхід 9 - Струмовий вихід передатчика (+) Вихід
11 - Струмовий вихід передатчика (-) Вихід 18 - Струмовий вхід прийомника (+) Вхід 20 DTR Готовність терміналу Вихід 22 RI Індикатор виклику Вхід 25 - Струмовий вхід прийомника (-) Вхід
Таблиця 17.3. Відповідність виводів між 9- і 25-контактним роз'ємами9-контактний
роз'єм25-контактний
роз'ємСигнал Опис
1 8 CD Виявлення несучого сигналу 2 3 RD Дані, що приймаються 3 2 TD Передавані дані 4 20 DTR Готовність терміналу 5 7 SG Загальний сигнал
52

6 6 DSR Готовність даних до передачі 7 4 RTS Запит передачі 8 5 CIS Готовність зовнішнього пристрою до прийому 9 22 Rl Індикатор виклику
CD — Carrier Detect. DSR — Data Set Ready. RD — Receive Data. RTS — Request To Send. TD — Transmit Data. CTS — Clear To Send. DTR — Data Terminal Ready. Rl — Ring Indicator. SG — Signal Ground.
Високошвидкісні послідовні портиПри використанні зовнішніх пристроїв RS-232, призначених для роботи з швидкістю вище 115 Кбіт/с (тобто вище за
максимальну швидкість мікросхем UART серії 16550 і їх еквівалентів), можна досягти максимальної ефективності, замінивши існуючі послідовні порти платою розширення, що містять одну з мікросхем UART типу 16650,16750 або 16850. Більшість плат підтримує швидкість обміну даними 230 Кбіт/с, 460 Кбіт/с або навіть вище, що має особливе значення при підключенні комп'ютера до швидкодійного зовнішнього пристрою, сполученого з послідовним портом, наприклад до термінального адаптера ISDN. Щоб повною мірою відчути швидкодію зовнішнього модему ISDN (термінального адаптера) необхідно забезпечити роботу послідовного порту із швидкістю передачі, рівною принаймні 230 Кбіт/с.
Багатопортова послідовна платаДля більшості користувачів досить одного або двох послідовних портів, розташованих на стандартній платі; але бувають
ситуації, коли виникає необхідність у використанні додаткових портів. У такому разі можна скористатися багатопортовою платою, яка надає додаткові порти, необхідні для сервісів віддаленого доступу (Remote Access Service — RAS), розрахованих на багато користувачів комп'ютерних систем, що використовують термінали, модемних пулів для ISP, збору даних і т.д.
В тому випадку, якщо потрібно тільки один або два додаткові послідовні порти, можна скористатися стандартною подвійною послідовною платою або багатоінтерфейсною платою вводу-виводу (подвійна послідовна плюс паралельна плата). Але для додавання від чотирьох до восьми портів необхідна вже спеціальна багатопортова плата. Власний роз'єм плати, розташований на задньому кронштейні, підключений до багатошарового кабелю розгалуження; кожна гілка кабелю закінчується стандартним кабельним роз'ємом DB9F RS-232. Кабелі розгалуження розраховані на роботу з мікросхемою UART 16550 або швидшою її версією.
Вбудовані послідовні портиВже у середині 1990-х років, починаючи з пізніх моделей 486-х комп'ютерів, замість окремих мікросхем UART почав
використовуватися компонент системної плати, що одержав назву Super I/O. Цей компонент, як і багаторежимний паралельний порт, звичайно містить два послідовні порти UART, контроллер гнучких дисків, контроллер клавіатури, іноді пам'ять CMOS; всі ці елементи розташовані в одній крихітній мікросхемі. Проте ця мікросхема працює так, як ніби всі перераховані пристрої були встановлені окремо, а саме: операційна система і виконувані програми взаємодіють з мікросхемами UART як з окремо встановленими модулями на плати адаптера послідовного порту. У сучасних системах функції компоненту Super I/O інтегровані в мікросхему South Bridge. Ця мікросхема з інтегрованим вводом-виводом, як і компонент Super I/O, безпосередньо взаємодіє з програмним забезпеченням.
Конфігурація послідовних портівНадходження в послідовний порт кожного чергового байта повинне обов'язково "привертати увагу" комп'ютера.
Здійснюється це подачею сигналу на лінію запиту переривання (IRQ). У 8-розрядній системній шині ISA передбачено вісім таких ліній, а в 16-розрядній ISA— 16. Звичайно запити IRQ обслуговує мікросхема контроллера переривань типу 8259: у стандартній конфігурації для порту СОМ1 призначена лінія IRQ 4, а для порту COM2 — лінія IRQ 3. Навіть в найсучасніших системах конфігурація СОМ-портів залишилася без змін, що необхідно для сумісності із старими версіями програмного і апаратного забезпечення.
При установці в комп'ютер послідовний порт необхідно налаштувати для використовування конкретної адреси порту вводу-виводу і переривання IRQ. Краще всього при цьому використовувати стандарти, прийняті для послідовних портів.
Якщо ви, окрім стандартних СОМ1 і COM2, встановлюєте ще і додаткові послідовні порти, обов'язково переконайтеся, що вони використовують унікальні номери переривань, що не викликають конфліктів. При установці адаптера послідовних портів перевірте, чи не використовуються переривання IRQ 3 і IRQ 4.
У Windows 9x додана підтримка 128 послідовних портів. Це дозволяє за допомогою багатопортової плати комплектувати і спільно використовувати дані від декількох пристроїв через один роз'єм і одне переривання.Таблиця 17.4. Стандартні адреси вводу-виводу і переривання для послідовних портівІм'я порту Адреса порту Переривання СОМ1 3F8h-3FFh IRQ 4 COM2 2F8h-2FFh IRQ 3 COM3 3E8h-3Efh IRQ 4* COM4 2E8h-2Efh IRQ 3*
53

*Хоча порти COM3 і COM4 можуть спільно з портами СОМ1 і COM2 використовувати переривання IRQ 3 і IRQ 4, не рекомендується конфігурувати порти таким чином. Якщо необхідні додаткові послідовні порти, то краще встановити COM3 на IRQ 5 або IRQ 10, а COM4 — на IRQ 11 (звичайно, якщо ці переривання IRQ не використовуються іншими адаптерами).
Паралельні портиУ паралельних портах для одночасної передачі байта інформації використовується вісім ліній. Цей інтерфейс
відрізняється високою швидкодією, часто застосовується для підключення до комп'ютера принтера, а також для з'єднання комп'ютерів. (Адже при цьому швидкість передачі даних значно вища, ніж при з'єднанні через послідовні порти: 4, а не 1 біт за раз.) Істотним недоліком паралельного порту є те, що з’єднувальні дроти не можуть бути дуже довгими. При великій довжині з’єднувального кабелю в нього доводиться вводити проміжні підсилювачі сигналів, оскільки інакше виникає безліч перешкод. Таблиця 17.5. Стандартний 25-контактний роз'єм паралельного порту
Вивід Сигнал Тип виводу1 Строб (-) Вихід 2 Дані, битий 0 (+) Вихід 3 Дані, битий 1 (+) Вихід 4 Дані, битий 2 (+) Вихід 5 Дані, битий 3(+) Вихід 6 Дані, битий 4 (+) Вихід 7 Дані, битий 5 (+) Вихід 8 Дані, битий 6 (+) Вихід 9 Дані, битий 7 (+) Вихід 10 Підтвердження (-) Вхід 11 Зайнятість (+) Вхід 12 Закінчився папір (+) Вхід 13 Вибір (+) Вхід 14 Автоматичний перевід рядка (-) Вихід 15 Помилка (-) Вхід 16 Ініціалізація принтера (-) Вихід 17 Вибір входу (-) Вихід 18 Дані, повернення біта О (-) /Общий Вхід 19 Дані, повернення біта 1 (-) /Общий Вхід 20 Дані, повернення біта 2 (-) /Общий Вхід 21 Дані, повернення біта 3 (-) /Общий Вхід 22 Дані, повернення біта 4 (-) /Общий Вхід 23 Дані, повернення біта 5 (-) /Общий Вхід 24 Дані, повернення біта 6 (-) /Общий Вхід 25 Дані, повернення біта 7 (-) /Общий Вхід
Стандарт IEEE 1284Цей стандарт був остаточно затверджений в березні 1994 року. У ньому визначені фізичні характеристики паралельних
портів (режими передачі даних і т.д.).Крім того, в стандарті IEEE 1284 описаний характер зміни зовнішніх сигналів, що поступають на багаторежимні
паралельні порти комп'ютера, тобто на порти, які можуть працювати в 4- і 8-розрядному режимах, а також в режимах ЕРР і ЕСР.
Хоча IEEE 1284 був випущений для стандартизації форм сигналів, за допомогою яких комп'ютер "спілкується" з пристроями, які підключаються, зокрема з принтером, цей стандарт цікавий і для виробників периферійних пристроїв, що підключаються до паралельних портів (дисководів, мережевих адаптерів і ін.).
Оскільки IEEE 1284 призначений тільки для апаратного забезпечення і не містить вимог до програмного забезпечення, що працює з паралельними портами, незабаром був розроблений стандарт, що визначає вимоги до такого програмного забезпечення і направлений на усунення відмінностей між мікросхемами паралельних портів різних виробників. У ньому, зокрема, описана специфікація для підтримки режиму ЕРР через BIOS.
Стандартом IEEE 1284 передбачена вища пропускна здатність з'єднання між комп'ютером і принтером або двома комп'ютерами. Для реалізації цієї можливості стандартний кабель принтера не підходить. Стандартом IEEE 1284 для принтера передбачена вита пара.
У стандарті IEEE 1284 визначений також новий роз'єм. Роз'єм типу А визначений як штирьковий DB25, роз'єм типу В — як Centronics 36. Роз'єм типу С є роз'ємом високої густини. Такі роз'єми (типу С) встановлюються на принтерах Hewlett-Packard. Роз'єми всіх трьох типів показані на мал. 17.3.
Стандарт IEEE 1284 визначає п'ять режимів роботи паралельного порту. Ці режими комбінуються в порти чотирьох типів, як показано в табл. 17.6.Визначувані стандартом IEEE 1284 режими приведені в табл. 17.7.Нижче приведений короткий опис вказаних типів і режимів паралельних портів.
54

Мал. 17.3. Три різні роз'єми, визначені в стандарті IEEE 1284Таблиця 17.6. Типи портів IEEE 1284Тип паралельного порту Режим вводу Режим виводу КоментаріСтандартний паралельний порт Напівбайтовий Сумісний 4-бітове введення, 8-бітовий вивід Двонаправлений Байтовий Сумісний Введення-вивід по 8 бітВдосконалений паралельний порт ЕРР)
ЕРР ЕРР Введення-вивід по 8 біт
Порт з розширеними можливостями (ЕСР)
ЕСР ЕСР Введення-вивід по 8 біт; використовуєтьсяпрямий доступ до пам’яті
Таблиця 17.7. Режими IEEE 1284Режим паралельного порту Напрям Швидкість передачі, Кбайт/с Напівбайтовий (4 біт) Тільки ввід 50 Байтовий (8 біт) Тільки ввід 150 Сумісний Тільки вивід 150 ЕРР Введення-вивід 500-2000 ЕСР Введення-вивід 500-2000
Стандартні паралельні портиУ першому комп'ютері IBM PC існував тільки один паралельний порт, призначений для передачі інформації від
комп'ютера до якого-небудь пристрою, наприклад до принтера. Однонаправленість паралельного порту першого PC цілком відповідала його основному призначенню — передачі даних на принтер. Проте у багатьох випадках бажано було мати двонаправлений паралельний порт навіть для принтера (щоб можна було реалізувати зворотний зв'язок, наприклад для принтерів типа PostScript). З однонаправленим паралельним портом здійснити це було неможливо.
Такий тип паралельних портів не призначався для використання вводу, проте за допомогою спеціальних схем (у яких чотири сигнальні лінії можуть бути представлені як 4-розрядне з'єднання) і однонаправленого паралельного порту можна забезпечити 8-розрядний вивід і 4-розрядне ввід. В даний час цей тип портів використовується досить рідко, оскільки в комп'ютерах, випущених після 1993 року, як правило встановлюються паралельні порти на зразок 8-розрядного, ЕРР і ЕСР.
Стандартний паралельний порт забезпечує швидкість передачі даних 50 Кбайт/с, але при використанні різних удосконалень пропускну здатність можна збільшити до 150 Кбайт/с.
Двонаправлені порти (8-розрядні)Двонаправлений паралельний порт вперше з'явився в 1987 році в комп'ютерах PS/2. Навіть сьогодні в PC-сумісних
комп'ютерах можна знайти порти, які звичайно позначаються як паралельні "типа PS/2", "двонаправлені" і "розширені" (extended) паралельні порти. Завдяки такому порту з'явилася можливість організувати двосторонній обмін даними між комп'ютером і різними периферійними пристроями. Для цього використовуються раніше вільні контаки роз'єму паралельного порту, а напрям передачі інформації визначається спеціальним бітом стану.
Двонаправлені порти можуть працювати з 8-розрядним вводом і виводом, використовуючи для цього вісім стандартних ліній передачі даних, пропускна здатність яких при підключенні зовнішніх пристроїв значно вище, ніж для 4-розрядних портів. Швидкість передачі даних при роботі через двонаправлений порт близько 150 Кбайт/с.
Вдосконалений паралельний порт (ЕРР)ЕРР (Enhanced Parallel Port) — це новий тип паралельного порту, який іноді називають швидкодійним паралельним
портом. Він розроблений компаніями Intel, Xircom і Zenith Data Systems і випущений в жовтні 1991 року. Першими пристроями, що пропонують можливості вдосконаленого паралельного порту, були портативні комп'ютери компанії Zenith Data Systems, адаптери компанії Xircom і мікросхема Intel 82360 SL I/O.
ЕРР працює практично на всіх швидкостях, підтримуваних шиною ISA, і пропонує десятикратне збільшення пропускної здатності в порівнянні із звичним паралельним портом. Цей тип портів розроблений спеціально для пристроїв, таких як мережеві адаптери, дисководи і накопичувачі на магнітній стрічці. Вдосконалений паралельний порт відповідає вимогам нового стандарту IEEE 1284 для паралельних портів і передає дані з швидкістю до 2 Мбайт/с.
Після виходу в 1992 році мікросхеми Intel 82360 SLI/O багато виробників почали випускати аналогічні пристрої вводу-виводу, в яких були реалізовані можливості ЕРР. Це породило проблему, що полягає у тому, що процедури роботи ЕРР на мікросхемах різних виробників істотно розрізнялися.
Версія 1.7 порту ЕРР, випущена в березні 1992 року, була першою популярною версією, що визначає вимоги до апаратного забезпечення. Ця версія не підтримує стандарт IEEE 1284. У деякій технічній документації помилково
55

посилаються на "ЕРР версії 1.9" як на якийсь стандарт ЕРР. Запам'ятайте: версії 1.9 ЕРР не існує, а всі специфікації ЕРР, що вийшли після версії 1.7, є частиною стандарту IEEE 1284.
Таким чином, існує два несумісні стандарти: ЕРР версії 1.7 і IEEE 1284. Проте завдяки тому, що вони досить схожі один на одного, стали випускати периферійне устаткування, що підтримує обидва стандарти, але в деяких випадках пристрої для ЕРР 1.7 можуть не працювати з портами IEEE 1284.
Порт з розширеними можливостями (ЕСР)Інший тип високошвидкісного паралельного порту, названий портом з розширеними можливостями (Enhanced
Capabilities Port — ЕСР), розроблений компаніями Microsoft і Hewlett-Packard і випущений в 1992 році. Подібно ЕРР, цей порт володів підвищеною продуктивністю і вимагав для своєї роботи спеціальної логіки пристроїв.
Порт з розширеними можливостями відповідає вимогам стандарту IEEE 1284. Проте, на відміну від ЕРР, він не є портом, спеціально розробленим для підключення пристроїв до PC-сумісних комп'ютерів. Основна мета розробки і випуску цього типу паралельних портів — підтримка "недорогого" підключення високошвидкісних принтерів. Ще однією відмінністю ЕСР від ЕРР є те, що режим роботи першого з них вимагає використання каналу прямого доступу до пам'яті, який ніяк не визначений в ЕРР (що часто приводить до конфліктів, пов'язаних з пристроями, які також використовують прямий доступ до пам'яті). Більшість комп'ютерів, в яких встановлені новітні мікросхеми, може працювати як в режимі ЕСР, так і в ЕРР, проте при взаємодії з пристроями, що підключаються до паралельних портів, режим ЕРР працює краще.
Конфігурація паралельних портівПаралельні порти відрізняються простішою конфігурацією, ніж послідовні. Навіть в BIOS перших комп'ютерів IBM PC
було передбачено три порти LPT. У табл. 17.8 приведені стандартні адреси вводу-виводу і установки переривань для паралельних портів.
Оскільки в BIOS і DOS завжди визначені три паралельні порти, проблеми навіть в старих комп'ютерах виникають рідко. Проте вони можуть з'явитися в системах з шиною ISA через брак апаратних переривань. Для звичного друку порт з апаратним перериванням не є життєво необхідним — в багатьох програмах ця можливість навіть не передбачена. Проте переривання іноді використовуються в програмах: наприклад, при виконанні фонових процесів друку в мережі або інших процесів друку з підкачкою даних (з буфера друку).
При швидкому друці на лазерному принтері також використовуються переривання. Саме тому, якщо ви використовуєте одну з вказаних програм, працювати вона буде дуже повільно (якщо взагалі працюватиме). Єдиний вихід з такої ситуації — використання порту з перериванням. У сучасних комп'ютерах операційні системи MS DOS і Windows 9x/Ме/2000 можуть підтримувати до 128 паралельних портів.
При конфігурації паралельних портів в комп'ютерах з шиною ISA/PCI звичайно переставляють перемички і перемикачі. Враховуючи різноманіття плати, що продається в даний час різними виробниками, необхідно перед конфігурацією ознайомитися з керівництвом по експлуатації, що практично завжди містить корисні відомості про цю процедуру.Таблиця 17.8. Стандартні адреси вводу-виводу і переривання паралельних портів
Стандартний порт Альтернативний порт Введення-вивід ПерериванняLPT1 - 3BCh-3BFh IRQ 7LPT1 LPT2 378h-37Ah IRQ 5LPT2 LPT3 278h-27Ah IRQ 5
USB і 1394 (i.Link) FireWire - нові інтерфейси вводу-виводу
В даний час для настільних і портативних комп'ютерів розроблено два високошвидкісні пристрої з послідовною шиною: USB (Universal Serial Bus — універсальна послідовна шина) і IEEE-1394, звана також i.Link або FireWire. Ці високошвидкісні комунікаційні порти відрізняються від стандартних паралельних і послідовних портів, встановлених в більшості сучасних комп'ютерів, ширшими можливостями. Перевага нових портів полягає у тому, що їх можна використовувати як альтернативу SCSI для високошвидкісних з'єднань з периферійними пристроями, а також під'єднувати до них всі типи зовнішніх периферійних пристроїв (тобто в даному випадку зроблена спроба об'єднання пристроїв вводу-виводу).
Новим напрямом в розвитку високошвидкісних периферійних шин є викорисання послідовної архітектури. Для передачі інформації в паралельній архітектурі, де біти передаються одночасно, необхідні лінії, що мають 8, 16 і більше дротів. Можна припустити, що за один і той же час через паралельний канал передається більше даних, ніж через послідовний, проте насправді збільшити пропускну здатність послідовного з'єднання набагато легше, ніж паралельного.
Паралельне з'єднання володіє рядом недоліків, одним з яких є фазовий зсув сигналу, через що довжина паралельних каналів, наприклад SCSI, обмежена (не повинна перевищувати 3 м). Проблема у тому, що, хоча 8- і 16-розрядні дані одночасно пересилаються передавачем, через затримки одні біти прибувають в приймач раніше інших. Отже, чим довше кабель, тим більше час затримки між першим і останнім прибулими бітами на приймальному кінці.
Послідовна шина дозволяє одноразово передавати 1 біт даних. Відсутність затримок при передачі даних дозволяє значно збільшити тактову частоту. Наприклад, максимальна швидкість передачі даних паралельного порту ЕРР/ЕСР досягає 2 Мбайт/с, тоді як порти IEEE-1394 (у яких використовується високошвидкісна послідовна технологія) підтримують швидкість передачі даних, рівну 400 Мбіт/с (близько 50 Мбайт/с), тобто в 25 разів вище. Швидкість передачі даних інтерфейсу USB 2.0 досягає 480 Мбіт/с (близько 60 Мбайт/с)!
Ще одна перевага послідовного способу передачі даних— можливість використання тільки одно- або двохдротяного каналу, тому перешкоди, що виникають при передачі, дуже малі, чого не можна сказати про паралельне з'єднання.
Вартість паралельних кабелів досить висока, оскільки дроти, призначені для паралельної передачі, не тільки використовуються у великій кількості, але і спеціальним чином укладаються, щоб запобігти виникненню перешкод, а це
56

вельми трудомісткий і дорогий процес. Кабелі для послідовної передачі даних, навпаки, дуже дешеві, оскільки складаються з декількох дротів і вимоги до їх екранування набагато нижчі, ніж у використовуваних для паралельних з'єднань.
Саме тому, а також враховуючи вимоги зовнішнього периферійного інтерфейсу Plug and Play і необхідність усунення фізичного нагромадження портів в портативних комп'ютерах, були розроблені ці дві високошвидкісні послідовні шини, використовувані вже сьогодні. Не дивлячись на те що шина IEEE 1394 була спочатку призначена для вузькоспеціалізованого використовування (наприклад, з відеокамерами стандарту DV), зараз вона застосовується і з іншими пристроями на зразок професійних сканерів і зовнішніх жорстких дисків.
Універсальна послідовна шина USBУ USB реалізована можливість підключення великої кількості периферійних пристроїв до комп'ютера. При підключенні
пристроїв до USB не потрібно встановлювати плати в роз'єми системної плати і реконфігуріровати систему, крім того, економно використовуються такі важливі системні ресурси, як IRQ (запити переривання). При підключенні периферійного устаткування до персональних комп'ютерів, оснащених шиною USB, його настройка відбувається автоматично, відразу після фізичного підключення, без перезавантаження або установки.
Основним ініціатором розробки стандарту USB виступила Intel. Починаючи з набору мікросхем системної логіки Triton П (82430НХ), в якому стандарт USB був втілений в мікросхемі РПХЗ South Bridge, компанія Intel підтримує цей стандарт у всіх своїх наборах мікросхем системної логіки. Спільно з Intel над створенням універсальної послідовної шини працювало ще сім компаній, серед яких Compaq, Digital, IBM, Microsoft, NEC і Northern Telecom. Ними був створений USB Implement Forum (USB-IF), метою якого є розвиток, підтримка і розповсюдження архітектури USB.
Перша версія USB анонсована в січні 1996 року, а версія 1.1 — у вересні 1998. У цій специфікації детальніше описані концентратори і інші пристрої. Більшість USB-пристроїв повинна бути сумісною із специфікацією 1.1, навіть якщо вони випущені до її офіційної публікації. У новій специфікації USB 2.0 швидкість передачі даних в 40 разів вища, ніж в оригінальній USB 1.0; крім того, забезпечується повна зворотна сумісність пристроїв. Плата розширення PCI (для настільних систем) і плата PC Card Cardbus-сумісних портативних комп'ютерів дозволяють модернізувати комп'ютери ранніх версій, що не мають вбудованих роз'ємів USB. Більшість плат розширення підтримує специфікацію USB 1.1, але деякі з них вже підтримують стандарт USB 2.0.
USB1.1Універсальна послідовна шина версії 1.1 — це інтерфейс, що працює із швидкістю 12 Мбіт/с (1,5 Мбайт/с) і заснований
на простому 4-дротяному з'єднанні. Ця шина підтримує до 127 пристроїв і використовує топологію зірки, побудовану на розширяльних концентраторах, які можуть входити в персональний комп'ютер, будь-який периферійний пристрій USB і навіть бути окремими пристроями. Для таких низькошвидкісних периферійних пристроїв, як клавіатура і миша, в універсальній послідовній шині передбачений "повільніший" підканал, що працює із швидкістю 1,5 Мбіт/с.
У USB використовується кодування даних NRZI (Non Return to Zero Invent). У цьому методі кодування зміна рівня напруги відповідає 0, а його відсутність — 1. NRZI є вельми ефективною схемою кодування даних, оскільки при її використанні не потрібні додаткові сигнали, наприклад синхроімпульси.
Для одночасного підключення декількох пристроїв USВ необхідно використовувати концентратор. За допомогою концентратора до одного порту USB можна підключити клавіатуру, мишу, цифрову камеру, принтер, телефон і т.д. У комп'ютері встановлюється модуль, що назвається кореневим концентратором, — початкова точка для підключення решти пристроїв. Практично всі системні плати мають два, чотири або більше портів USB. Підключаючи декілька концентраторів, можна створити каскадну структуру до п'яти рівнів в глибину. Типовий концентратор показаний на мал. 17.5.ПорадаДля підвищення надійності передачі даних рекомендується використовувати концентратор з власним енергозабезпеченням, підключений в адаптер АС. Концентратори, живлення до яких подається по шині, підключеній до роз'єму USB основного концентратора системи, далеко не завжди можуть забезпечити достатню потужність енергоємним пристроям на зразок оптичної миші.
Максимальна довжина кабелю між двома працюючими на граничній швидкості (12 Мбіт/с) пристроями або пристроєм і концентратором (мал. 17.6) — п'ять метрів.
У кабелі використовується екранована вита пара. Максимальна довжина кабелю для низькошвидкісних (1,5 Мбіт/с) пристроїв при використанні нескрученої пари дротів — три метри. Причому ці відстані зменшуються, якщо використовується тонший дріт.Швидкість передачі даних, підтримувана стандартом USB 1.1, менше, ніж при передачі даних по FireWire або SCSI, але, не дивлячись на це, такої швидкості цілком достатньо для підключення периферійних пристроїв. Інтерфейс USB 2.0 працює приблизно в 40 разів швидше, ніж USB 1.1; швидкість передачі даних досягає 480 Мбіт/с (або 60 Мбайт/с). Однією з властивостей USB 2.0 є можливість виконання паралельних операцій, що дозволяє пристроям USB 1.1 передавати дані одночасно, не переповнюючи канал шини USB.
Таблиця 17.9. Залежність максимальної довжини кабелю від питомого опору дротівТовщина Питомий опір, Ом/м Довжина (макс.), м
28 0,232 0,8126 0,145 1,3124 0,091 2,0822 0,057 3,3320 0,036 5,00
Роз'єми USBІснує два типи роз'ємів (штепселів) USB — А і В, які, на відміну від типового кабелю, під'єднуваного до послідовного
або паралельного порту, не прикручуються гвинтами. Штепсель USB (мал. 17.7) вставляється в роз'єм USB на персональному комп'ютері. У табл. 17.10 приведена схема розташування виводів в 4-дротяному роз'ємі USВ.
57

Роз'єми і гнізда серії А і ВТаблиця 17.10. Схема розташування висновків в роз'ємі USB
Контакт Сигнал Примітка1 VCC Кабель живлення2 Дані (-)3 Дані (+)4 Загальний Заземлення кабелю
USB задовольняє вимогам технології Plug and Play компанії Intel, зокрема вимозі гарячого підключення, при якому пристрій може під'єднуватися до комп'ютера без виключення живлення і перезавантаження системи. Потрібно просто підключити пристрій, після чого контроллер USB, встановлений в комп'ютері, самостійно його знайде, а також додасть необхідні для роботи ресурси і драйвери. Компанія Microsoft вже розробила спеціальні драйвери USВ і включила їх в операційні системи Windows 98 і вище. Підтримка універсальної послідовної шини необхідна також і в BIOS; шина USB встановлюється в нових системах, що мають вбудовані порти USB. Існує також плата USB, за допомогою яких можна додати можливості універсальної послідовної шини у вже існуючі комп'ютери. До USB можна підключити такі периферійні пристрої, як модеми, телефони, джойстики, клавіатури і пристрої управління покажчиком (миші).
Цікавою особливістю USB є можливість підведення потужності до всіх пристроїв, що підключаються, через шину. Завдяки підтримці Plug and Play система "опитує" пристрій, що підключається, про його енергетичні потреби і, якщо рівень потужності перевершує допустимий, видає попередження. Це найбільш ефективно для портативних комп'ютерів, місткість батарей яких обмежена.
Завдяки пристроям USB здійснюється самовизначення периферійного устаткування, що значно спрощує його установку. Це означає, що не потрібно встановлювати унікальні адреси для кожного периферійного пристрою — USB робить це автоматично. Причому при підключенні або відключенні пристроїв USB не потрібно вимикати комп'ютер або перезавантажувати систему. Проте повинна бути виконана одна умова: операційна система повинна підтримувати USB. Спочатку Windows 95 і Windows NT 4.0 не підтримували USB, але пізніше підтримка USB була реалізована у версії OSR 2 (OEM Service Release 2) Windows 95 (також званої Windows 95B).
Підтримка USBБагато систем, випущених ще до того, як у середині 1998 року була представлена операційна система Windows 98,
містять заблоковані вбудовані порти USB. Слід помітити, що за зовнішнім виглядом комп'ютера не можна визначити, які системи мають вбудовану підтримку USB. Зокрема, це торкається системної плати формфактора Baby-АТ. Зв'язано це з тим, що дані системи не були оснащені кабельними роз'ємами USB, необхідними для виводу з'єднувачів кореневого концентратора USB з системної плати на задню панель системного блоку.
В тому випадку, якщо підтримка USB відключена в базовій системі вводу-виводу, перезапустіть комп'ютер, відкрийте відповідний екран настройок BIOS і встановіть необхідні параметри USB. Встановіть при необхідності переривання USB. Після перезапуску комп'ютера, який вже "знає" про існування USB, операційна система розпізнає кореневий концентратор USB. Якщо ви використовуєте Windows 98 або новішу операційну систему, драйвери USB будуть встановлені автоматично; у Windows 95 це доведеться зробити вручну.
"Знайдені" порти USB можуть бути використані зразу ж після інсталяції драйверів і перезавантаження комп'ютера (звичайно, за наявності відповідних роз'ємів USB). В тому випадку, якщо системна плата не оснащена роз'ємами USB, слід придбати відповідні кабельні роз'єми. Не забудьте перед цим перевірити конфігурацію висновків роз'єму USB на системній платі. Стандартним є розташування в два ряди по п'ять висновків в кожному.
Одне з найзначніших достоїнств інтерфейсу типа USB полягає у тому, що для обслуговування всіх пристроїв універсальної послідовної шини потрібне тільки одне-єдине переривання. Це означає, що можна приєднати 127 пристроїв і
58

всі вони використовуватимуть одне переривання. У сучасних персональних комп'ютерах так часто не вистачає вільних адрес переривань, що ця, мабуть, найцінніша гідність USB.
В даний час випущено декілька унікальних пристроїв USB: USB-паралельний порт, USB-Ethernet, USB-SCSI, USB-PS/2 (стандартний порт клавіатури і миші) і мости прямого з'єднання USB, дозволяючі напряму підключити дві системи через USB. Пристрої USB-паралельний порт або USB-Ethernet дозволяють підключити периферійне устаткування з інтерфейсом RS232 або Centronics (наприклад, модеми або принтери) до порту USB. Перетворювач USB-Ethernet забезпечує підключення до локальної мережі через порт USВ. Драйвери, що поставляються з цими пристроями перетворення, дозволяють повністю емулювати роботу стандартного пристрою.
USB 2.0Специфікація USB 2.0 назад сумісна з USB 1.1 і використовує ті ж кабелі, роз'єми і програмне забезпечення, але працює
в 40 разів швидше за оригінальну специфікацію версій 1.0 і 1.1. Таке збільшення продуктивності дозволяє використовувати сучаснішу периферію — камери для відеоконференцій, сканери, принтери, пристрої зберігання даних. Для кінцевого користувача USB 2.0 нічим не відрізняється від 1.1, за винятком продуктивності. Всі існуючі пристрої USB 1.1 працюють на меншій швидкості з шиною USB 2.0. Порівняльні дані про продуктивність різних версій USB приведені в табл. 17.11.
Для роботи з високопродуктивними пристроями USB 2.0 необхідний концентратор, що підтримує цю ж версію специфікації USB. Можна використовувати старий концентратор USB 1.1, але збільшення продуктивності пристроїв USB 2.0 досягти не вдасться (максимальна швидкість передачі даних буде обмежена 1,5 Мбайт/с). Пристрої, підключені до концентратора USB 2.0, працюватимуть на максимальній швидкості — близько 60 Мбайт/с для USB 2.0 і 1,5 Мбайт/с для USB 1.1.Таблиця 17.11. Швидкість передачі даних різних версій USB
Інтерфейс Мбіт/с Мбайт/сUSB 1.1 (низька швидкість) 1,5 0,1875USB 1.1 (висока сюрость) 12 1,5USB2.0 480 60
Для одночасної спільної роботи пристроїв USB 2.0 і 1.1, підключених до високопродуктивного концентратора USB 2.0, використовується складна система буферизації вхідних даних. Таким чином, кожен пристрій працюватиме на максимально можливій швидкості.Як визначити, які з пристроїв підтримують стандарт USB 1.1, а які стандарт USB 2.0? В кінці 2000 року організація USB Implementer's Forum (USB-IF), яка являється власником і розробником стандартів USB, представила нові логотипи для виробів, що пройшли сертифікаційні випробування. Стандарт USB 1.1 тепер називається просто "USB", а стандарт USB 2.0 дістав назву "Hi-Speed USB".
IEEE-1394 (FireWire або i.Link)В кінці 1995 року відділ стандартів Інституту інженерів по електротехніці і електроніці (Institute of Electrical and
Electronic Engineers — IEEE ) опублікував стандарт IEEE-1394 (або скорочено 1394). Ці цифри— порядковий номер нового стандарту, який з'явився результатом обширних досліджень у області мультимедійних пристроїв. Його основна перевага полягає у високій швидкості передачі даних. На сьогоднішній день швидкість передачі, підтримувана цим стандартом, досягає 400 Мбіт/с.
Поточна версія стандарту 1394 одержала на даний момент назву 1394а (іноді її називають по року публікації стандарта— 1394а-2000). Стандарт 1394а призначений для вирішення проблем, пов'язаних з сумісністю і багатофункціональністю, які існували в оригінальній версії стандарту 1394. У цьому стандарті використовуються ті ж роз'єми і підтримуються ті ж швидкості передач, що і в оригінальному стандарті 1394.
Пропонований стандарт 1394b, як очікується, підтримуватиме швидкість передачі даних, рівну 1600 Мбіт/с; швидкості передач майбутніх версій цього стандарту зможуть досягти 3200 Мбіт/с. Стандарт 1394b підтримуватиме вищі швидкості, ніж існуючі в даний час стандарти 1394/1394а. Це пов'язано з впровадженням нових мережевих технологій, зокрема скляного і пластикового волоконно-оптичних кабелів і кабелю UTP 5-ї категорії, а також із збільшенням можливої відстані між пристроями, що використовують кабельне з'єднання 5-й категорії, і поліпшенням принципу передачі сигналів. Стандарт 1394b буде назад сумісний з пристроями 1394а.
FireWire — це високошвидкісна локальна послідовна шина, здатна передавати дані із швидкістю 100, 200 і 400 Мбіт/с (12,5, 25 і 50 Мбайт/с), а при роботі з деякими типами файлів — до 1 Гбіт/с. Ця шина використовує простий 6-дротяний кабель, що складається з двох різних пар ліній, призначених для передачі тактових імпульсів і інформації, а також двох ліній живлення. Як і USB, IEEE-1394 повністю підтримує технологію Pug and Play, включаючи можливість гарячого підключення (установка і витягання компонентів без відключення живлення системи). По структурі шина 1394 не так складна, як паралельна шина SCSI, і пристрої, що підключаються до неї, можуть споживати від неї струм до 1,5 А. По продуктивності шина IEEE-1394 перевершує Ultra-Wide SCSI, коштує набагато менше, а під'єднати пристрої до неї набагато простіше.
Шина 1394 побудована на розгалужувальній топології і дозволяє використовувати до 63 вузлів в ланцюжку і під'єднувати при цьому до кожного вузла до 16 пристроїв. Якщо цього недостатньо, то можна додатково підключити до 1023 шинних перемичок, які можуть сполучати більше 64000 вузлів! Крім того, шина 1394 може підтримувати пристрої, побудовані на одній шині, але працюючі на різних швидкостях передачі даних, як і SCSI. Більшість адаптерів 1394 має три вузли, кожний з яких підтримує 16 пристроїв.
Підключити до комп'ютера через шину 1394 можна практично всі пристрої, які можуть працювати з SCSI. Сюди входять всі види дискових накопичувачів, включаючи жорсткі, оптичні, CD- і DVD-ROM. До шини 1394 можуть підключатися цифрові відеокамери, пристрої із записом на магнітну стрічку і багато інших високошвидкісних периферійних пристроїв. Ймовірно, дуже скоро шина 1394 почне широко використовуватися як в настільних, так і в портативних комп'ютерах, а з часом замінить всі інші високошвидкісні шини.
В даний час набори мікросхем системної логіки, підтримуючі шину 1394, вже пропонуються виробниками. З'явилися адаптери PCI, що дозволяють додати підтримку 1394 в існуючі комп'ютери. Також підтримка роботи з цією шиною вбудована в Windows 95/98 і Windows NT/2000/XP. В даний час шина 1394 набула найширше поширення у області
59

цифрових відеопристроїв (камери, відеомагнітофони і т.д.). Подібні пристрої випускають компанії Sony, Panasonic, Sharp, Matsushita і ін. Окрім цифрових відеопристроїв стали з'являтися пристрої обробки відеоданих. Наприклад, компанії Adaptec і Texas Instruments випускають адаптери PCI, що підтримують IEEE-1394.
У табл. 17.12 приведена порівняльна характеристика двох нових технологий— IEEE-1394 і USB.Таблиця 17.12. Порівняння технологій IEEE-1394 і USB
IEEE-1394 (i.Link)
FireWire USB 1 .1 USB 2.0
Необхідність основного вузла Ні Так ТакМаксимальна кількість пристроїв
63 127 127
Гаряче підключення Так Так ТакМаксимальна довжина кабелю між пристроями, м
4,5 5 5
Швидкість передачі, Мбіт/с (Мбайт/с)
400(50) 12(1,5) 480(60)
Можлива швидкість передачі, Мбіт/с (Мбайт/с)
800(100), 1000 (125) Не визначена Не визначена
Типові пристрої, що підключаються
Цифрові відеокамери, цифрові відеокамери
високої роздільної здатності, HDTV,
високошвидкісні пристрої, сканери високої роздільної
здатності, електронні музичні інструменти
Клавіатури, миші, джойстики, модеми, цифрові відеокамери
низької роздільної здатності,
низькошвидкісні пристрої, принтери, сканери низької
роздільної здатності
Всі пристрої USB 1.1, а також цифрові відеокамери, цифрові відеокамери високої роздільної здатності, HDTV, високошвидкісні пристрої, сканери високої роздільної
здатності
Після появи USB 2.0 швидкості передачі даних IEEE-1394 і USB практично однакові (швидкість передачі даних IEEE -1394 і USB 1.1 відрізняються в 16 разів). Тому обговорювати переваги або недоліки порівнюваних технологій по цьому параметру недоцільно.
Для підключення периферії USB необхідний вузловий пристрій (найчастіше це комп'ютер), тоді як пристрої IEEE-1394 можна підключати напряму. Саме тому технологія IEEE -1394 набула найбільше поширення в цифрових відеопристроях.
Параметри процесорівПроцесори можна класифікувати по двох основних параметрах: розрядності і швидкодії. Швидкодія процесора —
досить простий параметр. Він вимірюється в мегагерцах (Мгц); 1 Мгц рівний мільйону тактів в секунду. Чим вища швидкодія, тим краще (тим швидший процесор). Розрядність процессора — параметр складніший. У процесор входить три важливі пристрої, основною характеристикою яких є розрядність:
• шина вводу і виводу даних;• внутрішні регістри;• шина адреси пам'яті.Процесори з тактовою частотою менше 16 Мгц не мають вбудованої кеш-пам'яті. У системах до 486-го процесора
швидка кеш-пам'ять встановлювалася на системну плату. Починаючи з процесорів 486, кеш-пам'ять першого рівня встановлювалася безпосередньо в корпусі і працювала на частоті процесора. А кеш-пам'ять на системній платі стали називати кеш-пам'яттю другого рівня. Вона працювала вже на частотах, підтримуваних системною платою.
У процесорах Pentium Pro і Pentium II кеш-пам'ять другого рівня встановлюється в корпусі і фізично представляє окрему мікросхему. Найчастіше така пам'ять працює на половинній (процесори Pentium II/III і AMD Athlon) або навіть меншій (дві п'ятих або третина) частоті ядра процесора. У табл. 3.1 приведені дані про робочі частоти кеш-пам’яті другого рівня процесорів Pentium П/Ш/Celeron і Athlon (моделі 1 і 2).Таблиця 3.1. Параметри кеш-пам'яті другого рівня Pentium ll/lll/Celeron і Athlon
ПроцесорЧастота, Мгц
Об'єм кеш-пам'яті, Кбайт
Тип кеш-пам'яті Робоча частота
Pentium III 450-600 512 Зовнішній Половина частоти ядра (225-300 Мгц)Athlon 550-700 512 Зовнішній Половина частоти ядра (275-350 Мгц)Athlon 750-850 512 Зовнішній Дві п'яті частоти ядра (300-340 Мгц)Athlon 900-1000 512 Зовнішній Третина частоти ядра (300-333 Мгц)У процесорах Pentium Pro, Pentium П/Ш Хеоп, сучасних моделях Pentium Ш, Celeron, К6-3, Athlon (модель 4),
Duron кеш-пам'ять працює на частоті ядра (табл. 3.2).Таблиця 3.2. Параметри кеш-пам'яті другого рівня сучасних процесорів
Процесор Частота, Мгц Об'єм кеш-пам'яті Тип кеш-пам'яті Робоча частотаPentium Pro 150-200 256 Кбайт-1 Мбайт Зовнішній Частота ядра
К6-3 350-450 256 Кбайт На пластині Частота ядраDuron 550-700+ 64 Кбайт На пластині Частота ядра
60

Celeron 300-600+ 128 Кбайт На пластині Частота ядраPentium II Хеоп 400-450 512Кбайт-2Мбайт Зовнішній Частота ядра
Athlon 650-1 000+ 256 Кбайт На пластині Частота ядраPentium III 500-1 000+ 256 Кбайт На пластині Частота ядра
Pentium III Xeon 500-1 000+ 256 Кбайт-2 Мбайт На пластині Частота ядраPentium 4 1300-2000 256 Кбайт На пластині Частота ядра
Xeon 1400-2000 256 Кбайт-1 Мбайт На пластині Частота ядраПричина того, що кеш-пам'ять другого рівня працювала на меншій в порівнянні з ядром процесора частоті, досить
проста: існуючі мікросхеми кеш-пам'яті не задовольняли умовам ринку. Компанією Intel була створена мікросхема швидкодійної кеш-пам'яті для процесора Хеоn, собівартість якої виявилася надзвичайно високою. Проте поява нових технологій виробництва процесорів дозволила використовувати кеш-пам'ять, що працює на частоті ядра, і в дешевих процесорах Celeron другого покоління. Ця конструкція була запозичена другим поколінням Intel Pentium Ш, а також процесорами К6-3, Athlon і Duron компанії AMD. Подібна архітектура, використовувана в даний час практично у всіх розробках Intel і AMD, є єдиним більш менш рентабельним способом застосування швидкодійної кеш-пам'яті другого рівня.
ПроцесорКратність тактової частоти
Напруга живлення, В
Розрядність внутрішніх
регістрів, біт
Розрядність шини даних,
біт
Максимальний об'єм пам'яті
Внутрішній кеш, Кбайт
Тип внутрішнього кешу
8088 1x 5 16 8 1 Мбайт - -8086 1x 5 16 16 1 Мбайт - -286 1x 5 16 16 16 Мбайт - -386SX 1x 5 32 16 16 Мбайт - -386SL 1x 3,3 32 16 16 Мбайт 01 Чт.386DX 1x 5 32 32 4 Гбайт - -486SX 1x 5 32 32 4 Гбайт 8 Чт.486SX2 2x 5 32 32 4 Гбайт 8 Чт.487SX 1x 5 32 32 4 Гбайт 8 Чт.486DX 1x 5 32 32 4 Гбайт 8 Чт.486SL2 1x 3,3 32 32 4 Гбайт 8 Чт.486DX2 2x 5 32 32 4 Гбайт 8 Чт.486DX4 2-3x 3,3 32 32 4 Гбайт 16 Чт.486Pentium OD 2,5x 5 32 32 4 Гбайт 2x16 Чт./3ап.Pentium 60/66 1x 5 32 64 4 Гбайт 2x8 Чт./3ап.Pentium 75-200 1,5-3x 3,3-3,5 32 64 4 Гбайт 2x8 Чт./3ап.Pentium MMX 1,5-4,5x 1,8-2,8 32 64 4 Гбайт 2x16 Чт./3ап.Pentium Pro 2-3x 3,3 32 64 64 Гбайт 2x8 Чт./3ап.Pentium II 3,5-4,5x 1,8-2,8 32 64 64 Гбайт 2x16 Чт./3ап.Pentium II РЕ 3,5-6 1,6 32 64 64 Гбайт 2x16 Чт./3ап.Celeron 3,5-4,5x 1,8-2,8 32 64 64 Гбайт 2x16 Чт./3ап.Celeron А 3,5-8x 1,5-2 32 64 64 Гбайт 2x16 Чт./3ап.Celeron III 4,5-9x 1,3-1,6 32 64 64 Гбайт 2x16 Чт./3ап.Pentium III 4-6x 1,8-2 32 64 64 Гбайт 2x16 Чт./3ап.Pentium HIE 4-9x 1,3-1,7 32 64 64 Гбайт 2x16 Чт./3ап.Pentium II Xeon 4-4,5x 1,8-2,8 32 64 64 Гбайт 2x16 Чт./3ап.Pentium III Xeon 5-6x 1,8-2,8 32 64 64 Гбайт 2x16 Чт./3ап.Pentium HIE Xeon 4,5-6,5x 1,65 32 64 64 Гбайт 2x16 Чт./3ап.Pentium 4 3-5x 1,7 32 64 64 Гбайт 12+8 Чт./3ап.Pentium 4 Xeon 3-5x 1,7 32 64 64 Гбайт 12+8 Чт./3ап.Itanium 3-5x 1,6 64 64 16 Гбайт 2x16 Чт./3ап.
Процесор Кеш другого рівня
Швидкодія кешу другого рівня
Вбудований співпроцесор
Інструкції мультимедіа
К-сть транзисторів
Дата появи на ринку
8088 - - - - 29 тис. Червень 1979 р. 8086 - - - - 29 тис. Червень 1978 р. 286 - - - - 134 тис. Лютий 1982 р. 386SX - Шина - - 275 тис. Червень 1988 р. 386SL' - Шина - - 855 тис. Жовтень 1990 р. 386DX - Шина - - 275 тис. Жовтень 1985 р. 486SX - Шина - - 1,185 млн. Квітень 1991 р. 486SX2 - Шина - - 1,185 млн. Квітень 1994 р. 487SX - Шина Є - 1,2 млн. Квітень 1991 р. 486DX - Шина Є - 1,2 млн. Квітень 1989 р. 486SL2 - Шина Необов'язково - 1,4 млн. НоябрЫ992г. 486DX2 - Шина Є - 1,2 млн. Березень 1992 р. 486DX4 - Шина Є - 1,6 млн. Лютий 1994 р. 486Pentium OD - Шина Є - 3,1 млн. Січень 1995 р. Pentium 60/66 - Шина Є - 3,1 млн. Березень 1993 р. Pentium 75-200 - Шина Є - 3,3 млн. Березень 1994 р. Pentium MMX - Шина Є ммх 4,1 млн. Січень 1997 р. Pentium Pro 256 Кбайт, Ядро Є - 5,5 млн. НоябрЫ995г.
512 Кбайт, 1 Мбайт
Pentium II 51 2 Кбайт Половина ядра Є ммх 7,5 млн. Травень 1997 р. Pentium II РЕ 256 Кбайт Ядро3 Є ммх 27,4 млн. Січень 1999 р. Celeron - - Є ммх 7,5 млн. Квітень 1998 р. Celeron А 128 Кбайт Ядро3 Є ммх 19 млн. Серпень 1998 р.
61

Celeron III 128 Кбайт Ядро3 Є SSE 28,1 млн4 Лютий 2000 р. Pentium III 512 Кбайт Половина ядра Є SSE 9,5 млн. Лютий 1999 р. Pentium HIE 256 Кбайт Ядро3 Є SSE 28,1 млн. Жовтень 1999 р. Pentium II Xeon 512 Кбайт, Ядро Є ММХ 7,5 млн. Квітень 1998 р.
1 Мбайт, 2 Мбайт
Pentium III Xeon 512 Кбайт, Ядро Є SSE 9,5 млн. Березень 1999 р. 1 Мбайт, 2 Мбайт
Pentium HIE Xeon 256 Кбайт, Ядро3 Є SSE 28,1 млн., Жовтень 1999 р., травень 1 Мбайт, 84 млн., 2000г. 2 Мбайт 140 млн.
Pentium 4 256 Кбайт Ядро3 Є SSE2 42 млн. Листопад 2000 р. Pentium 4 Xeon 256 Кбайт Ядро3 Є SSE2 42 млн. Травень 2001 р. Itanium 96 Кбайт5 Ядро3 Є ММХ 25 млн. Травень 2001 р.
ПроцесорКратність тактової частоти
Напруга живлення, В
Розрядність внутрішніх
регістрів, біт
Розрядність шини даних,
біт
Максимальний об'єм пам'яті
Внутрішній кеш, Кбайт
Тип внутрішнього кешу
AMDK5 1,5-1,75x 3,5 32 64 4 Гбайт 16+8 Чт./3ап.AMD Кб 2,5-4,5x 2,2-3,2 32 64 4 Гбайт 2x32 Чт./3ап.AMDK6-2 2,5-6x 1,9-2,4 32 64 4 Гбайт 2x32 Чт./3ап.AMDK6-3 3,5-4,5x 1,8-2,4 32 64 4 Гбайт 2x32 Чт./3ап.AMD Athlon 5-10x 1,6-1,8 32 64 8Тбайт 2x64 Чт./3ап.AMD Duron 5-10x 1,5-1,8 32 64 8Тбайт 2x64 Чт./3ап.AMD Athlon 4 (Thunderbird)
5-10x 1,5-1,8 32 64 8Тбайт 2x64 Чт./3ап.
Cyrix 6x86 2x 2,5-3,5 32 64 4 Гбайт 16 Чт./3ап.Cyrix 6x86MtyMII
2-3,5x 2,2-2,9 32 64 4 Гбайт 64 Чт./3ап.
Cyrix III 2,5-7x 2,2 32 64 4 Гбайт 64 Чт./3ап.NexgenNx586 2x 4 32 64 4 Гбайт 2x16 Чт./3ап.IDTWinchip 3-4x 3,3-3,5 32 64 4 Гбайт 2x32 Чт./3ап.IDT Winchip2/2A
2,33-4x 3,3-3,5 32 64 4 Гбайт 2x32 Чт./3ап.
RisemP6 2-3,5x 2,8 32 64 4 Гбайт 2x8 Чт./3ап.FPU—пристрій для виконання операцій з плаваючою крапкою (внутрішній співпроцесор).Чт. — кеш-пам'ять тільки для операцій читання.Чт./Зап. — кеш-пам'ять для операцій читання і записи.М — мільйонів транзисторів.Шина — кеш-пам'ять працює на частоті системної шини.Ядро — кеш-пам'ять працює на частоті процесора.ММХ — мультимедійні розширення, 57 додаткових команд для роботи з графікою і звуком.3DNow — ММХ плюс 21 додаткова команда для роботи з графікою і звуком.Enh. 3DNow — 3DNow плюс 24 додаткові команди для роботи з графікою і звуком.SSE — потокові розширення SIMD (Single Instruction Multiple Data), ММХ плюс 70 додаткових команд для роботи з
графікою і звуком.SSE2 — потокові розширення SIMD2, SSE плюс 144 додаткові команди для роботи з графікою і звуком.1В процесор 386SL вбудовано кеш-контроллер, але мікросхеми пам'яті встановлюються додатково.2 Пізніше компанія Intel створила версії процесорів SL Enhanced, працюючі при на
пряженії 5 В і 3 В, які одержали назву SX, DX і DX2.3 Вбудована кеш-пам'ять другого рівня, працююча на частоті процесора.4 Кеш-пам'ять другого рівня, що має об'їм 128 Кбайт (загальний об'єм пам'яті
256 Кбайт, доступний — 728 Кбайт); використовує той же кристал, що і Pentium IIIE.
ПроцесорКеш
другого рівня
Швидкодія кешу другого рівня
Вбудований співпроцесор
Інструкції мультимедіаК-сть
транзисторівДата появи на ринку
AMDK5 - Шина Є - 4,3 млн. Березень 1996 р.AMD Кб - Шина Є ММХ 8,8 млн. Квітень 1997 р.AMDK6-2 - Шина Є 3DNow 9,3 млн. Травень 1998 р.AMDK6-3 256 Ядро Є 3DNow 21,3 млн. Лютий 1999 р.AMD Athlon 512 1/2-1/3 ядра Є Enh. 3DNow 22 млн. Червень 1999 р.AMD Duron 64 Ядро Є Enh. 3DNow 25 млн. Червень 2000 р.AMD Athlon 4 (Ttiunderbird)
256 Ядро Є Enh. 3DNow 37 млн. Червень 2000 р.
Cyrix 6x86 - Шина Є - Змлн Люті 996 р.Cyrix 6x86MX/MII - Шина Є MMX 6,5 млн. Травень 1997 р.Cyrix III 256 Ядро Є 3DNow 22 млн. Лютий 2000 р.NexgenNx586 - Шина Є - 3,5 млн. Березень 1994 р.IDTWinchip - Шина Є MMX 5,4 млн. Жовтень 1997 р.IDTWinchip2/2A - Шина Є 3DNow 5,9 млн. Вересень 1998 р.RisemP6 - Шина Є MMX 3,6 млн. Жовтень 1998 р.
5 В процесор Itanium включена додаткова кеш-пам'ять третього рівня об'ємом 2 Мбайт (150 млн. транзисторів) або 4 Мбайт (300 млн. транзисторів), встановлена в картріджі процесора і працююча на його частоті.
62

Швидкодія процесораШвидкодія — це одна з характеристик процесора, яку часто тлумачать по-різному. Тут ви дізнаєтеся про
швидкодію процесорів взагалі і процесорів Intel зокрема.Швидкодія комп'ютера багато в чому залежить від тактової частоти, звичайно вимірюваної в мегагерцах (Мгц).
Вона визначається параметрами кварцового резонатора, що є кристалом кварцу, заключеним в невеликий олов'яний контейнер. Під впливом електричної напруги в кристалі кварцу виникають коливання електричного струму з частотою, визначуваною формою і розміром кристала. Частота цього змінного струму і називається тактовою частотою. Мікросхеми звичного комп'ютера працюють на частоті декількох мільйонів герц. (Герц — одне коливання в секунду.) Швидкодія вимірюється в мегагерцах, тобто в мільйонах циклів в секунду.
Якнайменшою одиницею вимірювання часу (квантом) для процесора як логічного пристрою є період тактової частоти, або просто такт. На кожну операцію витрачається мінімум один такт. Наприклад, обмін даними з пам'яттю процесор Pentium П виконує за три такти плюс декілька циклів очікування. (Цикл очікування — це такт, в якому нічого не відбувається; він необхідний тільки для того, щоб процесор не "тікав" вперед від менш швидкодійних вузлів комп'ютера.)
Розрізняється і час, що витрачається на виконання команд.• 8086 і 8088. У цих процесорах на виконання однієї команди йде приблизно 12 тактів.• 286 і 386. Ці процесори зменшили час на виконання команд приблизно до 4,5 тактів.• Процесор 486 і велика частина Intel-сумісних процесорів четвертого покоління, таких, як AMD 5x86, зменшили
цей параметр до 2 тактів.• Серія Pentium, Кб. Архітектура процесорів Pentium і інших Intel-сумісних процесорів п'ятого покоління,
створених в AMD і Cyrix, включаюча двійні конвейєри команд і інші удосконалення, забезпечила виконання однієї або двох команд за один такт.
• Pentium Pro, Pentium П/Ш/Celeron і Athlon/Duron. Процесори класу Р6, а також другі процесори шостого покоління, створені компаніями AMD і Cyrix, дозволяють виконати мінімум три команди за один такт.
Різна кількість тактів, необхідних для виконання команд, утрудняє порівняння продуктивності комп'ютерів, засноване тільки на їх тактовій частоті (тобто кількості тактів в секунду). Чому при одній і тій же тактовій частоті один процесор працює швидше за інше? Причина криється в продуктивності.
Процесор 486 володіє вищою швидкодією в порівнянні з 386-им, оскільки на виконання команди йому вимагається в середньому в два рази менше тактів, ніж 386-му. А процесору Pentium — в два рази менше тактів, ніж 486-му. Таким чином, процесор 486 з тактовою частотою 133 Мгц (типа AMD 5x86-133) працює навіть повільніше, ніж Pentium з тактовою частотою 75 Мгц! Це відбувається тому, що при одній і тій же частоті Pentium виконує удвічі більше команд, ніж процесор 486. Pentium П і Pentium Ш— приблизно на 50% швидший за процесор Pentium, що працює на тій же частоті, тому що вони можуть виконувати значно більше команд протягом тієї ж кількості циклів.
Порівнюючи відносну ефективність процесорів, можна побачити, що продуктивність Pentium Ш, працюючого на тактовій частоті 1 000 Мгц, теоретично рівна продуктивності Pentium, працюючого на тактовій частоті 1 500 Мгц, яка, у свою чергу, теоретично рівна продуктивності процесора 486, працюючого на тактовій частоті 3 000 Мгц, а вона, у свою чергу, теоретично рівна продуктивності процесорів 386 або 286, працюючих на тактовій частоті 6 000 Мгц, або ж 8088-го, працюючого на тактовій частоті 12 000 Мгц. Якщо врахувати, що первинний PC з процесором 8088 працював на тактовій частоті, рівній всього лише 4,77 Мгц, то сьогоднішні комп'ютери більш ніж в 1,5 тис. раз швидші в порівнянні з ним. Тому не можна порівнювати продуктивність комп'ютерів, ґрунтуючись тільки на тактовій частоті; необхідно брати до уваги те, що на ефективність системи впливають і інші чинники.
Оцінювати ефективність центрального процесора досить складно. Центральні процесори з різною внутрішньою архітектурою виконують команди по-різному: одні і ті ж команди в різних процесорах можуть виконуватися або швидше, або повільніше. Щоб знайти задовільну міру для порівняння центральних процесорів з різною архітектурою, працюючих на різних тактових частотах, Intel винайшла специфічний ряд еталонних тестів, які можна виконати на мікросхемах Intel, щоб зміряти відносну ефективність процесорів. Ця система тестів недавно була модифікована для того, щоб можна було вимірювати ефективність 32-розрядних процесорів; вона називається індексом (або показником) iCOMP 2.0 (intel Comparative Microprocessor Performance — порівняльна ефективність мікропроцесора Intel). В даний час використовується третя версія цього індексу — iCOMP 3.0. Докладнішу інформацію про еталонні тести, включаючи індекс iCOMP, можна одержати на одному з Web-вузлів Intel за адресою: http://developer.intel.com/procs/perf/resources/spectrum.htm.
Індекс iCOMP 2.0 обчислюється за результатами декількох незалежних випробувань і досить об'єктивно характеризує відносну продуктивність процесора. При підрахунку iCOMP враховуються операції з плаваючою комою і операції, необхідні для виконання мультимедійних програм.
Не так давно компанія Intel анулювала індекс iCOMP 2.0 і випустила його нову версію — індекс iCOMP 3.0. Ця версія є оновленим еталонним тестом, що враховує все зростаюче використання тривимірної графіки, мультимедійних засобів, технологій і програмного забезпечення Internet, а також обробку могутніх потоків даних і додатку, використовувані для інтенсивних обчислень. Індекс ICOMP 3.0, по суті, об'єднує в собі шість еталонних тестів: WinTune 98 Advanced CPU Integer, CPUMark 99, 3D WinBench 99-3D, MultimediaMark 99, Jmark 2.0 і WinBench 99-FPU WinMark. У результатах нових тестів враховується набір команд SSE (потокові розширення SIMD), а також додаткові команди для обробки графіки і звуку, використовувані в Pentium Ш. Результати, одержані при тестуванні серії процесорів Pentium Ш без урахування нового набору команд, будуть такими ж, як і для Pentium II, працюючих на аналогічній тактовій частоті.
У табл. 3.6 приведені індекси iCOMP 3.0 сімейства нових процесорів Intel Pentium Ш.Таблиця 3.6. Індекси iCOMP 3.0 для процесорівПроцесор Індекс Процесор Індекс
63

Pentium II 350 1000 Pentium III 650 2270 Pentium II 450 1240 Pentium III 700 2420 Pentium III 450 1500 Pentium III 750 2540 Pentium III 500 1650 Pentium III 800 2690 Pentium III 550 1780 Pentium III 866 2890 Pentium III 600 1930 Pentium III 1000 3280 Pentium III 600E 2110
Кеш-пам'ять першого рівняУ всіх процесорах, починаючи з 486-го, є вбудований (першого рівня) кеш-контроллер з кеш-пам'яттю об'ємом 8
Кбайт в процесорах 486DX, а також 32, 64 Кбайт і більш в сучасних моделях. Кеш — це швидкодійна пам'ять, призначена для тимчасового зберігання програмного коду і даних. Звернення до вбудованої кеш-пам'яті відбуваються без станів очікування, оскільки її швидкодія відповідає можливостям процесора, тобто кеш-пам'ять першого рівня (або вбудований кеш) працює на частоті процесора.
64
Таблиця 3.10. Об'єм пам'яті, що адресується процесорами компанії IntelТип процесора Розрядність
шини адреси Байт Кбайт Мбайт Гбайт Тбайт
8088/8086 20 1048576 1024 1 - - 286/386SX 24 16777216 16384 16 - - 386Щ/486/КлассР5 32 4294967296 4194304 4096 4 - Клас Р6 Клас Р7 36 68719476736 67108864 65536 64 - Itanium 44 17592186044416 17179869184 16777216 16384 16
Примітка. Pentium і AMD Кб відносяться до процесорів сімейства 586 (п'яте покоління). Pentium Pro/II/III/Celeron і AMD Athlon/Duron — до процесорів 686 (шосте покоління), а Pentium 4 розглядається як процесор 786 (сьоме покоління).
Використання кеш-пам'яті зменшує традиційний недолік комп'ютера, що полягає у тому, що оперативна пам'ять працює більш поволі, ніж центральний процесор (так званий ефект "темно-зеленої шийки") - Завдяки кеш-пам'яті процесору не доводиться чекати, поки чергова порція програмного коду або даних поступить з відносно повільної основної пам'яті, що приводить до відчутного підвищення продуктивності.
У сучасних процесорах вбудований кеш виконує ще важливішу роль, тому що він часто є єдиним типом пам'яті у всій системі, який може працювати синхронно з процесором. У більшості сучасних процесорів використовується множник тактової частоти, отже, вони працюють на частоті, у декілька разів перевищуючої тактову частоту системної платі, до якої вони підключені. Наприклад, тактова частота (1 ГГц), на якій працює процесор Pentium TTT, в сім з половиною разів перевищує тактову частоту системної платі, рівну 133 Мгц. Оскільки оперативна пам'ять підключена до системної платі, вона також може працювати тільки на тактовій частоті, що не перевищує 133 Мгц. У такій системі зі всіх видів пам'яті тільки вбудований кеш може працювати на тактовій частоті 1 ГГц. Розглянутий в даному прикладі процесор Pentium Ш на 1 ГГц має вбудований кеш загальним об'ємом 32 Кбайт (у двох окремих блоках по 16 Кбайт).
Якщо дані, необхідні процесору, знаходяться вже у внутрішній кеш-пам'яті, то затримок не виникає. Інакше центральний процесор повинен одержувати дані з кеш-пам'яті другого рівня або (у менш складних системах) з системної шини, тобто безпосередньо з основної пам'яті.
Щоб зрозуміти значення кеш-пам'яті, необхідно порівняти відносні швидкості процесорів і ОЗУ. Основна проблема полягає у тому, що швидкодія процесора виражається звичайно в Мгц (у мільйонах тактів в секунду), тоді як швидкість пам'яті виражається в наносекундах (тобто мільярдних частках секунди).
Для того, щоб розібратися з принципами роботи кеш-пам'яті першого і другого рівнів, розглянемо наступну аналогію.
Герой нашої історії (в даному випадку — ви), куштуючий різні страви, виступає в ролі процесора, який витягує необхідні дані з пам'яті і проводить їх обробку. Кухня, на якій готуються ваші улюблені блюда, є основною оперативною пам'яттю (SIMM/DIMM). Офіціант є кеш-контроллером, а стіл, за яким ви сидите, виступає як кеш-пам'ять першого рівня. Роль кеш-пам'яті другого рівня виконує візок із замовленими блюдами, неквапом мандрівна між кухнею і вашим столом.
Ролі розподілені, пора починати нашу історію. Щодня, приблизно в один і той же час ви обідаєте в певному ресторані. Входьте в обідній зал, сідаєте за столик і замовляєте, наприклад, хот-дог. Для того, щоб зберегти відповідність подій, припустимо, що середня швидкість поглинання їжі рівна одному біту в чотири секунди (цикл процесора 233 Мгц складає близько 4 нс). А також визначимо, що кухарю (тобто кухні) для приготування кожного замовленого блюда потрібно 60 с (значить, швидкість основної пам'яті 60 нс).
Таким чином, при перших відвідинах ресторану ви сідаєте за столик і замовляєте хот-дог, після чого доводиться чекати цілих 60 секунд, коли ж приготують замовлене блюдо. Коли офіціант нарешті приносить замовлення, ви не поспішаючи, з середньою швидкістю, приймаєтеся за їжу. Швидко доївши хот-дог, кличете до себе офіціанта і замовляєте гамбургер. Поки його готують, ви знову чекаєте тих же 60 секунд. Принесений гамбургер з'їдається з тією ж швидкістю. Підібравши останні крихти, знову звете офіціанта і замовляєте котлети "по-київськи". Після 60-секундного очікування принесене блюдо з'їдається з аналогічною швидкістю. Після цього вирішуєте замовити на десерт, скажімо, яблучний пиріг. Замовлений пиріг ви одержуєте після того, що став звичним 60-секундного очікування. Одним словом, обід складається головним чином з тривалих очікувань, які перемежаються енергійним поглинанням блюд, що замовляються.
Після того, як ви два дні підряд рівно в 18.00 приходите в ресторан і замовляєте одні і ті ж блюда в одній і тій же послідовності, у офіціанта з'являється ділова думка: "Сьогодні в 18.00 знову з'явиться цей дивний відвідувач і зробить своє звичне замовлення: хот-дог, гамбургер, котлети "по-київськи" і яблучний пиріг на десерт. Чом би не приготувати ці блюда наперед? Я думаю, він належним чином оцінить мої старання". Отже, ви приходите в ресторан, замовляєте хот-дог, і офіціант зразу ж, без щонайменшої паузи, ставить перед вами замовлене блюдо. Після того, як ви обробилися з хот-догом і збираєтеся замовити чергове блюдо, на столі з'являється тарілка з гамбургером. Частина обіду, що залишилася, проходить приблизно так само. Ви стрімко, з швидкістю один біт в чотири секунди, поглинаєте їжу, не чекаючи, поки замовлене блюдо буде приготоване на кухні. На цей раз час обіду заповнений виключно ретельним пережовуванням їжі, і все завдяки кмітливості і практичному підходу офіціанта.
Приведений приклад достатньо точно описує роботу кеш-пам'яті першого рівня в процесорі. Роль кеш-пам'яті першого рівня в даному випадку виконує піднос, на якому може знаходитися одне або декілька блюд. За відсутності офіціанта простір підноса є якимсь резервним запасом (тобто буфер) продуктів харчування. Якщо буфер заповнений, значить, можна їсти до тих пір, поки піднос не опустіє. Офіціант є кешем-контроллером, що вживає певним заходам і намагається вирішити, які ж блюда слід наперед поставити на стіл відповідно до ваших можливих побажань. Подібно
65
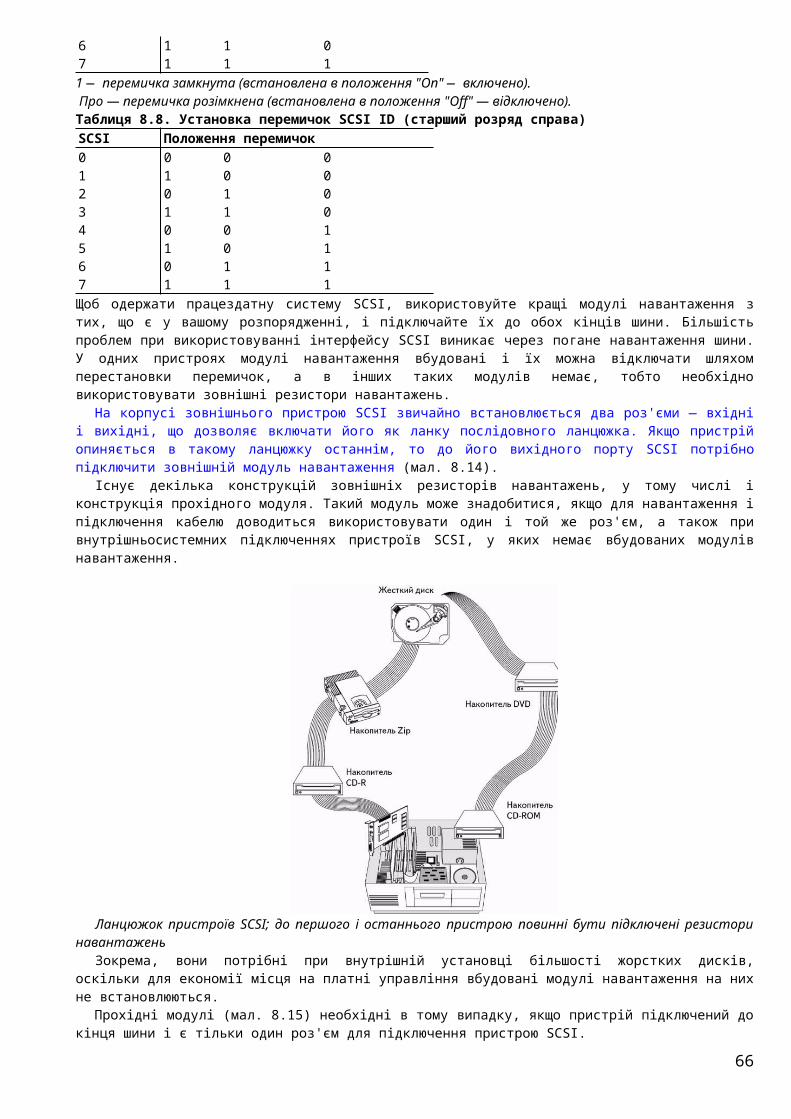
справжньому кеш-контроллеру, офіціант скористається своїм досвідом для того, щоб визначити, яке блюдо буде замовлене наступним. Якщо він визначить правильно, значить, не доведеться довго чекати.
Настав день четвертий. Ви з'являєтеся в ресторані, як завжди, рівно в 18.00 і починаєте із звичного хот-дога. Офіціант, що вивчив на той час ваші смаки, вже приготував хот-дог, і ви зразу ж приступаєте до трапези.
Після хот-дога офіціант приносить вам гамбургер і замість слів подяки чує: "Взагалі-то, я гамбургер не замовляв. Принесіть мені, будь ласка, відбивну". Офіціант помилився в своїх припущеннях, і вам знову доведеться чекати цілих 60 секунд, поки на кухні приготують замовлене блюдо. Подібна подія, тобто спроба доступу до тієї частини кешованого файлу, який відсутній в кеш-пам'яті, називається промахом кеша (cache miss). Як наслідок, виникає пауза або, якщо говорити про систему Pentium 233 Мгц, при кожному промаху кеша швидкодія системи знижується до 16 Мгц (тобто до швидкості оперативної пам'яті). Кеш-пам'ять першого рівня більшої частини процесорів Intel має коефіцієнт збігу, рівний приблизно 90%.
Це означає, що кеш-пам'ять містить коректні дані 90% часу і, отже, процесор працює на повній швидкості (в даному випадку з частотою 233 Мгц) приблизно 90% всього часу. Що залишилися 10% часу кеш-контроллер звертається до повільнішої основної пам'яті, при цьому процесор знаходиться в стані очікування. Фактично відбувається зниження швидкодії системи до рівня оперативної пам'яті, швидкодія якої рівна 60 не (або 16 Мгц).
У нашому прикладі швидкодія процесора приблизно в 14 разів вища за швидкодію оперативної пам'яті. З розвитком наукового прогресу, швидкодія пам'яті збільшилася з 16 Мгц (60 не) до 266 Мгц (3,8 не), тоді як тактова частота процесорів виросла до 2 ГГц і більш. Таким чином, навіть в найсучасніших системах пам'ять все ще в 7,5 або більше разів повільніше за процесор. Кеш-пам'ять дозволяє компенсувати цю різницю.
Основна особливість кеш-пам'яті першого рівня полягає у тому, що вона завжди інтегрована з ядром процесора і працює на тій же частоті. Це властивість в поєднанні з коефіцієнтом збігів, рівним 90%, робить кеш-пам'ять важливої становлячої ефективності системи.
Кеш-пам'ять другого рівняДля того, щоб зменшити відчутне уповільнення системи, що виникає при кожному промаху кеша, задіюється кеш-
пам'ять другого рівня.Розвиваючи аналогію з рестораном, можна позначити вторинний кеш як сервіровочний столик з "черговими"
блюдами, розташування якого дозволяє офіціанту принести будь-яке з наявних блюд через 15 секунд. У системі класу Pentium (Socket 7), кеш-пам'ять другого рівня встановлена на системній платі, тобто працює на тактовій частоті системної платі (66 Мгц, або 15 не). Розглянемо ситуацію, коли ви замовляєте блюдо, якого немає в числі раніше принесених. В цьому випадку, замість того щоб відправитися на кухню і через 60 секунд принести приготоване блюдо, офіціант в першу чергу перевіряє столик з "черговими" блюдами. За наявності там замовленого блюда він повертається вже через 15 секунд. Результат в реальній системі виражається в наступному: замість зниження швидкодії системи з 233 до 16 Мгц і відповідно швидкодію основної пам'яті до 60 не відбувається витягання необхідних даних з кеш-пам'яті другого рівня, швидкодія якої рівна 15 не (66 Мгц). Таким чином, швидкодія системи змінюється з 233 до 66 Мщ.
Коефіцієнт збігу кеш-пам'яті як першого, так і другого рівнів складає 90%. Таким чином, розглядаючи систему в цілому, можна сказати, що 90% часу вона працює з повною тактовою частотою (у нашому прикладі 233 Мгц), одержуючи дані з кеш-пам'яті першого рівня; 10% часу дані витягуються з кеш-пам'яті другого рівня. Процесор працює з кеш-пам'яттю другого рівня тільки 90 % цього часу, а що залишилися 10% через промахи кеша— з повільнішою основною пам'яттю. Таким чином, об'єднуючи кеш-пам’ять першого і другого рівнів, одержуємо, що звична система працює з частотою процесора 90% часу (у нашому випадку 233 Мгц), з частотою системної платі 9% часу (тобто 90% від 10% при частоті 66 Мгц) і з тактовою частотою основної пам'яті приблизно 1% часу (10% від 10% при частоті 16 Мгц). Це наочно демонструє важливість кеш-пам’яті першого і другого рівнів; за відсутності кеш-пам'яті система часто звертається до ОЗУ, швидкість якого значно нижче за швидкість процесора.
Це наводить на цікаві роздуми. Уявіть, що ви збираєтеся підвищити ефективність оперативної пам'яті або кеш-пам'яті другого рівня удвічі. На що ж саме витратити гроші? Беручи до уваги, що оперативна пам'ять безпосередньо використовується приблизно 1% часу, подвійне підвищення її продуктивності приведе до підвищення швидкодії системи тільки в цей період часу! Навряд це звучить достатньо переконливо. З другого боку, якщо удвічі підвищити ефективність кеш-пам'яті другого рівня, вийде збільшення швидкодії системи, відповідне 9% часу, і це, безумовно, істотніше поліпшення.
Системотехніки і фахівці з розробки процесорів компаній Intel і AMD, не втрачаючи часу дарма, розробили методи підвищення ефективності кеш-пам'яті другого рівня. У системах класу Pentium (Р5) кеш-пам'ять другого рівня звичайно встановлюється на системній платі і працює, відповідно, з її тактовою частотою. Intel значно підвищила продуктивність процесорів, перемістивши кеш-пам'ять з системної платі безпосередньо в процесор, що збільшило її робочу частоту до частоти процесора. Спочатку мікросхеми кеша встановлювалися в одному корпусі разом з основним процесором. Але така конструкція виявилася дуже дорогою, тому, починаючи з процесорів сімейства Pentium П, компанія Intel стала придбавати мікросхеми кеш-пам'яті у сторонніх виробників (Sony, Toshiba, NEC, Samsung і т.д.). Мікросхеми поставлялися вже в готовому вигляді, в корпусному виконанні, тому Intel почала їх встановлювати на монтажній платі поряд з процесором. Саме тому процесор Pentium П був спочатку розроблений у вигляді картріджа.
Одна з істотних проблем полягала в швидкодії мікросхем кеш-пам'яті сторонніх виробників. Швидкість найшвидших мікросхем досягала 3 не і вище, що було еквівалентно тактовою частоті 333 Мгц. Але процесори вже працювали на вищих швидкостях, тому в Pentium II і перших моделях Pentium TIT кеш-пам'ять другого рівня працює на половинній частоті процесора. У деяких моделях процесора Athlon швидкість кеш-пам'яті другого рівня зменшена до двох п'ятих або навіть однієї третини тактової частоти ядра.
66
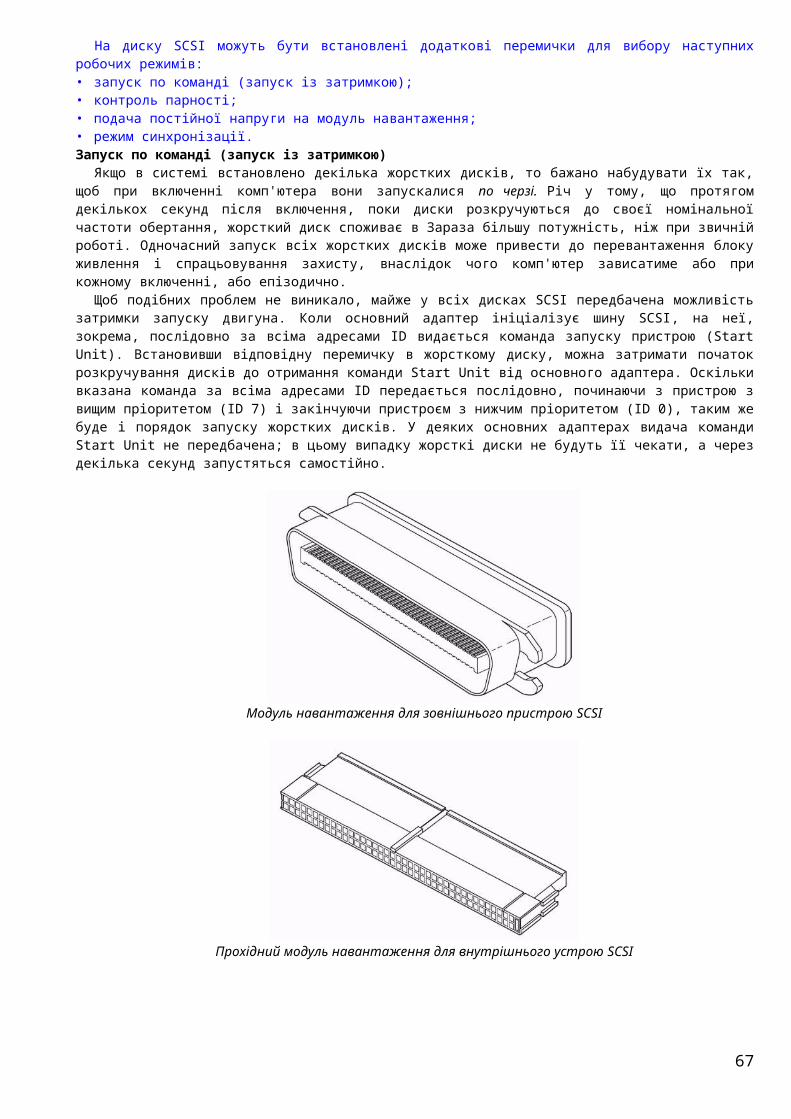
Якісний стрибок в технології відбувся з появою процесорів Celeron 300A і вище. У цих процесорах зовнішні мікросхеми кеш-пам'яті другого рівня не використовуються. Натомість кеш-пам'ять як першого, так і другого рівнів інтегрована безпосередньо в ядро процесора. Таким чином, кеш-пам'ять обох рівнів працює з повною тактовою частотою процесора, що дозволяє підвищувати її швидкодію при можливому збільшенні швидкості процесора. У останніх моделях Pentium Ш, а також у всіх процесорах Хеоп і Celeron кеш-пам'ять другого рівня як і раніше працює з тактовою частотою ядра процесора, а значить, при невдалому обігу в кеш-пам'ять першого рівня очікування або уповільнення операцій не відбувається. У сучасних моделях процесорів Athlon і Duron також використовується вбудована кеш-пам'ять, що працює з частотою ядра. Як ви знаєте, при невдалому зверненні до зовнішньої кеш-пам'яті відбувається зниження швидкості кеша до половинної частоти ядра або, що ще гірше, до частоти повільнішої системної платі. Використовування вбудованого кеша дозволяє значно підвищити ефективність процесора, оскільки 9% часу в системі використовуватиметься кеш-пам'ять другого рівня, працююча з повною частотою ядра. До числа переваг вбудованої кеш-пам'яті відноситься також зменшення її вартості, оскільки вона містить менше компонентів.
Повернемося до розглянутої раніше аналогії, використовуючи як приклад сучасний процесор Pentium Ш з тактовою частотою 1 ГГц. Тепер швидкість поглинання їжі рівна одному байту в секунду (тактовій частоті 1 ГГц відповідає тривалість циклу 1 нс). Кеш-пам'ять першого рівня працює на цій же частоті, тобто швидкість вживання блюд, що знаходяться на вашому столі, рівна швидкості процесора (а ваш столик відповідає кеш-пам’яті першого рівня). Відчутне підвищення швидкодії відбувається у тому випадку, коли ви замовляєте блюдо, якого немає на столику (промах кеша першого рівня), і офіціанту доводиться звертатися до столика з "черговими" блюдами. У дев'яти випадках з десяти він знаходить там необхідне блюдо, яке приносить через 1 з (частота кеш-пам'яті другого рівня рівна 1 ГГц, що відповідає швидкості 1 не). Отже, сучасні системи працюють 99% часу (сумарний коефіцієнт збігу кеш-пам'яті першого і другого рівнів) з частотою 1 ГГц і, як і раніше, в одному випадку із ста знижують швидкість до частоти оперативної пам'яті (приготування блюда на кухні). При збільшенні швидкості пам'яті до 133 Мгц (7,5 не) час очікування замовленого блюда з кухні досягне 7,5 с. Ех, якби швидкість обслуговування в ресторані підвищувалася так само, як швидкодія процесора!
Режими процесораВсі 32-розрядні і пізніші процесори Intel, починаючи з 386-го, можуть виконувати програми в декількох режимах.
Режими процесора призначені для виконання програм в різних середовищах; у різних режимах можливості чіпа неоднакові, тому що команди виконуються по-різному. Залежно від режиму процесора змінюється схема управління пам'яттю системи і задачами.
Процесори можуть працювати в трьох режимах: реальному, захищеному і віртуальному реальному режимі (реальному усередині захищеного).
Реальний режимУ первинному IBM PC використовувався процесор 8088, який міг виконувати 16-розрядні команди, застосовуючи
16-розрядні внутрішні регістри, і адресувати тільки 1 Мбайт пам'яті, використовуючи 20 розрядів для адреси. Все програмне забезпечення PC спочатку було призначене для цього процесора; воно було розроблене на основі 16-розрядної системи команд і моделі пам'яті об'ємом 1 Мбайт. Наприклад, DOS, все програмне забезпечення DOS, Windows від 1.x до 3.x і всі програми для Windows від 1.x до 3.x написані з розрахунку на 16-розрядні команди. Ці 16-розрядні операційні системи і програми були розроблені для виконання на первинному процесорі 8088.
Пізніші процесори, наприклад 286, могли також виконувати ті ж самі 16-розрядні команди, що і первинний 8088, але набагато швидше. Іншими словами, процесор 286 був повністю сумісний з первинним 8088 і міг виконувати всі 16-розрядні програми точно так, як і 8088, але, звичайно ж, значно швидше. Шістнадцятирозрядний режим, в якому виконувалися команди процесорів 8088 і 286, був названий реальним режимом. Всі програми, що виконуються в реальному режимі, повинні використовувати тільки 16-розрядні команди, 20-розрядні адреси і підтримуватися архітектурою пам'яті, розрахованою на місткість до 1 Мбайт. Для програмного забезпечення цього типу звичайно використовується однозадачний режим, тобто одночасно може виконуватися тільки одна програма. Немає ніякого вбудованого захисту для запобігання перезапису елементів пам'яті однієї програми або навіть операційної системи іншою програмою; це означає, що при виконанні декількох програм цілком можуть бути зіпсовані дані або код однієї з них, а це може привести всю систему до краху (або останову).
Захищений режимПершим 32-розрядним процесором, призначеним для PC, був 386-й. Цей чіп міг виконувати абсолютно нову 32-
розрядну систему команд. Щоб повністю використовувати перевагу 32-розрядної системи команд, були необхідні 32-розрядна операційна система і 32-розрядні програми. Цей новий режим називався захищеним, оскільки програми, що виконуються в ньому, захищені від перезапису своїх областей пам'яті іншими програмами. Такий захист робить систему надійнішою, оскільки жодна програма з помилками вже не зможе так легко пошкодити інші програми або операційну систему. Крім того, програму, "потерпілу крах", можна досить просто завершити без збитку для всієї системи.
Знаючи, що розробка нових операційних систем і програм, що використовують переваги 32-розрядного захищеного режиму, займе якийсь час, Intel передбачила в процесорі 386 назад сумісний реальний режим. Завдяки цьому процесор 386 міг виконувати немодифіковані 16-розрядні програми. Причому вони виконувалися набагато швидше, ніж на будь-якому процесорі попереднього покоління. Для більшості користувачів цього було досить; їм не потрібне все 32-розрядне програмне забезпечення — достатньо було того, щоб 16-розрядні програми, що були у них, працювали швидше. На жаль, через це процесор ніколи не працював в 32-розрядному захищеному режимі, і всі можливості такого режиму не використовувалися.
67

Коли високопродуктивний процесор, подібний Pentium Ш, працює в реальному режимі, він нагадує 'Turbo 8088". Слово 'Turbo" означає, що процесор має перевагу в швидкодії при виконанні 16-розрядних програм; хоча він може виконувати тільки 16-розрядні команди і звертатися до пам'яті в межах все того ж 1 Мбайт, передбаченого картою пам'яті процесора 8088. Тому, навіть якщо у вас система з Pentium Ш і оперативною пам'яттю місткістю 128 Мбайт, при роботі з Windows 3.x або DOS насправді використовується тільки перший мегабайт пам'яті, а інші 127 практично не застосовуються!
В зв'язку з цим з'явилася необхідність в нових операційних системах і програмах, які б використовували всі переваги сучасних процесорів. Проте деякі користувачі спочатку чинили опір усіляким спробам переходу до 32-розрядного середовища. Співтовариство користувачів виявилося вельми стійким в своїх прив’язаностей і не бажало змінювати звичок.
Через опір користувачів 32-розрядні операційні системи, такі, як Unix і її різновиди (наприклад, Linux), OS/2 і навіть Windows NT\2000, розповсюджувалися на ринку персональних комп'ютерів достатньо повільно. Зі всіх перерахованих систем тільки Windows 2000 стала по-справжньому широко поширеним програмним продуктом, та і то завдяки величезній популярності ОС Windows 95 і що послідували за нею Windows 98 і Me. Останньою повністю 16-розрядною операційною системою була Windows серії 3.x. Хоча насправді вона працювала як надбудова DOS.
У Microsoft зрозуміли, наскільки вперті користувачі комп'ютерів, і розробили Windows 95 як проміжну систему для переходу в 32-розрядний світ. Windows 95 — в основному 32-розрядна операційна система, але в ній можна виконувати старі 16-розрядні програми. Windows 95 побачила світло в серпні 1995 року, тобто через 10 років після появи першого 32-розрядного процесора для PC. Потрібно "всього лише" 10 років, щоб впровадити програмне забезпечення, яке може повністю використовувати процесори!
Процесор Itanium, що з'явився не так давно, став первістком миру 64-розрядних можливостей. Цей процесор також сумісний зі всім існуючим 32-розрядним програмним забезпеченням. Але для того, щоб скористатися властивостями процесора в повному об'ємі, потрібно повноцінні 64-розрядні операційні системи і програми. Компанія Microsoft вже випустила 64-розрядні версії операційної системи Windows XP, тоді як різними компаніями створюються 64-розрядні програми для серверів і робочих станцій.
Віртуальний реальний режимДля зворотної сумісності 32-розрядна система Windows 9x використовує третій режим в процесора — віртуальний
реальний режим. Він, по суті, є режимом виконання 16-розрядного середовища (реальний режим), яке реалізоване усередині 32-розрядного захищеного режиму (тобто віртуально, а не реально). Виконуючи команди у вікні підказки DOS усередині Windows 95/98, ви створюєте віртуальний сеанс реального режиму. Оскільки захищений режим є достовірно багатозадачним, фактично можна виконувати декілька сеансів реального режиму, причому в кожному сеансі власне програмне забезпечення працює на віртуальному комп'ютері. І всі ці програми можуть працювати одночасно, навіть під час виконання інших 32-розрядних програм.
Зверніть увагу, що будь-яка програма, що виконується у віртуальному вікні реального режиму, може звертатися тільки до пам'яті об'ємом до 1 Мбайт, причому для кожної такої програми це буде перший і єдиний мегабайт пам'яті в системі. Іншими словами, якщо ви виконуєте програму DOS у віртуальному реальному вікні, йому буде доступна пам'ять тільки об'ємом до 640 Кбайт. Так відбувається тому, що є тільки 1 Мбайт загальної оперативної пам'яті в 16-розрядному середовищі, а верхні 384 Кбайт зарезервовані для системи. Віртуальне реальне вікно повністю імітує середовище процесора 8088, і, якщо не враховувати швидкодію, програмне забезпечення виконуватиметься так, як воно виконувалося першим PC в реальному режимі. Кожна віртуальна машина одержує власні 1 Мбайт адресного простору і власний екземпляр реальних апаратних підпрограм управління апаратурою (базову систему вводу-виводу), причому при цьому емулюються всі регістри і можливості реального режиму.
Віртуальний реальний режим використовується при виконанні програм у вікні DOS, а також при виконанні 16-розрядних програм, написаних для DOS або Windows 3.x, в Windows 95/98. При запуску програми DOS операційна система Windows 9x створює віртуальну машину DOS, на якій ця програма може виконуватися.
Важливо відзначити, що всі процесори Intel (а також Intel-сумісні AMD і Cyrix) при включенні живлення починають працювати в реальному режимі. При завантаженні 32-розрядна операційна система автоматично перемикає процесор в 32-розрядний режим і управляє ним в цьому режимі.
Деякі програми DOS і Windows 3.x поводяться непередбаченим чином, тобто роблять речі, які не підтримуються навіть у віртуальному реальному режимі. Діагностичне програмне забезпечення — прекрасний тому приклад: воно коректно не працюватиме у вікні реального режиму (віртуального реального) під управлінням Windows 95/98 або NT. Щоб на Pentium II запустити таке програмне забезпечення в первинному спрощеному режимі, необхідно перервати процес початкового завантаження системи і просто завантажити DOS. Це можна виконати в Windows 95/98, натискаючи клавішу <F8>, коли на екрані з'являється підказка Starting Windows.... Потім, коли з'явиться завантажувальне меню, в ньому потрібно вибрати команду завантаження простої 16-розрядної операційної системи реального режиму DOS. Краще всього вибрати Safe mode command prompt, якщо ви збираєтеся використовувати діагностичні процедури (звичайно не виконувані в захищеному режимі), які повинні бути запущені з мінімумом драйверів і іншого програмного забезпечення.
Операційна система Windows Me створювалася, як ви знаєте, на основі Windows 98. Намагаючись відучити користувачів від 16-розрядного режиму роботи, Microsoft видалила опцію завантажувального меню (Startup). Операційні системи Windows NT і 2000 також позбавлені можливості перервати завантаження так само. Для запуску комп'ютера в режимі DOS доведеться створити завантажувальний диск, який і буде потім використовуватися для завантаження системи в реальному режимі. Як правило, цей режим потрібен для певного технічного обслуговування, зокрема для виконання апаратної діагностики або безпосереднього редагування секторів диска.
68

Хоча реальний режим використовується DOS і "стандартними" програмами DOS, є спеціальні програми, які "розширюють" DOS і дозволяють доступ до додаткової пам'яті XMS (понад 1 Мбайт). Вони іноді називаються розширювачами DOS і звичайно включаються як частина програмного забезпечення DOS або Windows 3.x, в якому використовуються. Протокол, що описує, як виконувати DOS в захищеному режимі, називається DPMI (DOS protected mode interface — інтерфейс захищеного режиму DOS). Він використовувався в Windows 3.x для звернення до додаткової пам'яті XMS при роботі програм для Windows 3.x. Цей протокол дозволяв 16-розрядним програмам використовувати пам'ять, що перевищує 1 Мбайт. Розширювачі DOS особливо часто застосовуються в іграх DOS; саме завдяки ним ігрова програма може використовувати набагато більший об'єм пам'яті, ніж стандартний (1 Мбайт), до якого може адресуватися більшість програм, що працюють в реальному режимі. Ці розширювачі DOS перемикають процесор в реальний режим і назад, а у разі запуску під управлінням Windows застосовують DPMI, вбудований в Windows, і тим самим дозволяють іншим програмам спільно використовувати частину додаткової пам'яті XMS системи.
Є ще одне виключення — перші 64 Кбайт додаткової пам'яті в реальному режимі доступні програмам. Це результат помилки в першому комп'ютері IBM AT, пов'язаної з 21-й лінією адреси пам'яті (А20, оскільки АТ — перший рядок адреси). Управляючи сигналом на лінії А20, програмне забезпечення реального режиму може діставати доступ до перших 64 Кбайт додаткової пам'яті — це перші 64 Кбайт пам'яті, наступні за першим мегабайтом. Ця область пам'яті називається областю верхніх адрес пам'яті (high memory area — НМА).
Технологія ММХЗалежно від контексту, ММХ може означати multi-media extensions (мультимедійні розширення) або matrix math
extensions (матричні математичні розширення). Технологія ММХ використовувалася в старших моделях процесорів Pentium п'ятого покоління як розширення, завдяки якому швидшає компресія/декомпресія відеоданих, маніпулювання зображенням, шифрування і виконання операцій вводу-виводу — майже всі операції, використовувані в багатьох сучасних програмах.
У архітектурі процесорів ММХ є два основні удосконалення. Перше, фундаментальне, полягає у тому, що всі мікросхеми ММХ мають більший внутрішній вбудований кеш, ніж їх побратими, що не використовують цю технологію. Це підвищує ефективність виконання кожної програми і всього програмного забезпечення незалежно від того, чи використовує воно фактично команди ММХ.
Інше удосконалення ММХ полягає в розширенні набору команд процесора 57 новими командами, а також у введенні нової можливості виконання команд, що називається одиночний потік команд — множинний потік даних (Single Instruction — Multiple Data, SIMD).
У сучасних мультимедійних і мережевих програмах часто використовуються цикли; хоча вони займають близько 10% (або навіть менше) об'єму повного коду програми, на їх виконання може піти до 90% загального часу. SIMD дозволяє одній команді здійснювати одну і ту ж операцію над декількома даними, подібно тому як викладач, читаючи лекцію, звертається до всієї аудиторії, а не до кожного студента окремо. Технологія SIMD дозволяє прискорити виконання циклів при обробці графічних, анімаційних, відео- і аудіофайлів; інакше ці цикли віднімали б час у процесора.
Intel також додала 57 нових команд, спеціально розроблених для ефективнішої обробки звукових, графічних і відеоданих. Ці команди призначені для виконання з високим ступенем паралелізму послідовностей, які часто зустрічаються при роботі мультимедійних програм. Високий ступінь паралелізму в даному випадку означає, що одні і ті ж алгоритми застосовуються до багатьох даних, наприклад до даних в різних точках при зміні графічного зображення.
Такі компанії, як AMD і Cyrix, ліцензіювали у Intel технологію ММХ і реалізували її у власних процесорах.
Інструкції SSEУ лютому 1999 року Intel представила процесор Pentium Ш, що містить оновлення технології ММХ, що одержала
назву SSE (Streaming SIMD Extensions — потокові розширення SIMD). До цього моменту інструкції SSE носили ім'я Katmai New Instructions (KNI), оскільки спочатку вони були включені в процесор Pentium Ш з кодовим ім'ям Katmai. Процесори Celeron 533А і вище, створені на основі ядра Pentium III, теж підтримують інструкції SSE. Раніші версії процесора Pentium II, рівно як Celeron 533 і нижче (створені на основі ядра Pentium II), SSE не підтримують.
Інструкції SSE містять 70 нових команд для роботи з графікою і звуком на додаток до існуючих команд ММХ. Фактично цей набір інструкцій окрім назви KNI мав ще і другу назву — ММХ-2. Інструкції SSE дозволяють виконувати операції з плаваючою комою, реалізовані в окремому модулі процесора. У технологіях ММХ для цих цілей використовувався стандартний пристрій з плаваючою комою.
Інструкції SSE2, що містять в собі 144 додаткові команди SIMD, були представлені в листопаді 2000 року разом з процесором Pentium 4. У SSE2 були включені всі інструкції попередніх наборів ММХ і SSE.
Потокові розширення SIMD (SSE) містять цілий ряд нових команд для виконання операцій з плаваючою комою і цілими числами, а також команди управління кеш-пам’яттю. Нові технології SSE дозволяють ефективніше працювати з тривимірною графікою, потоками аудіо- і відеоданих (DVD-відтворення), а також додатками розпізнавання мови. В цілому SSE забезпечує наступні переваги:
• Вищу роздільну здатність /якість при перегляді і обробці графічних зображень;• поліпшена якість відтворення звукових і відеофайлів у форматі MPEG2, а також одночасне кодування і
декодування формату MPEG2 в мультімедійних програмах;
69
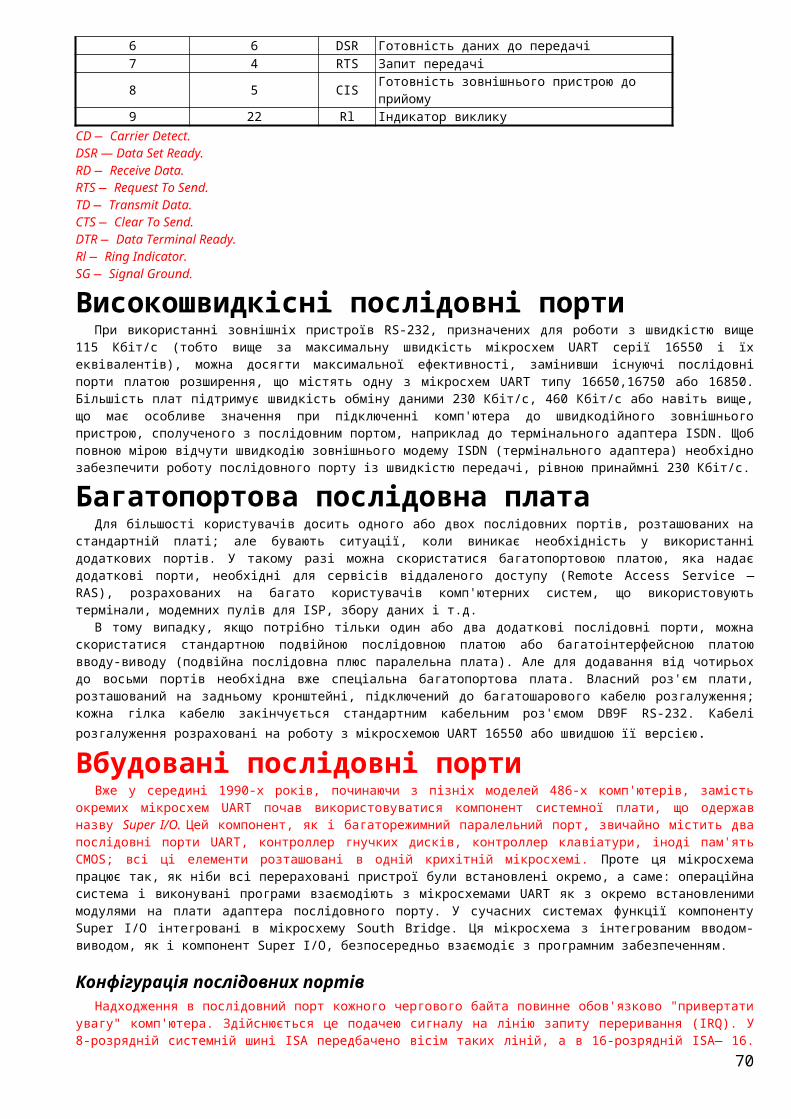
• зменшення завантаження процесора і підвищення точності/швидкості реагування привиконанні програмного забезпечення для розпізнавання мови.
Інструкції SSE і SSE2 особливо ефективні при декодуванні файлів формату MPEG2, який є стандартом стиснення звукових і відеоданих, використовуваним в DVD-дисках. Отже, SSE-оснащені процесори дозволяють досягти максимальної швидкості декодування MPEG2 без використовування додаткових апаратних засобів (наприклад, платня декодера MPEG2). Крім того, процесори, що містять набір інструкцій SSE, значно перевершують попередні версії процесорів при розпізнаванні мови.
Однією з основних переваг SSE по відношенню до ММХ є підтримка операцій SIMD з плаваючою комою, що дуже важливе при обробці тривимірних графічних зображень. Технологія SIMD, як і ММХ, дозволяє виконувати відразу декілька операцій при отриманні процесором однієї команди. Зокрема, SSE підтримує виконання до чотирьох операцій з плаваючою комою за цикл; одна інструкція може одночасно обробляти чотири блоки даних. Для виконання операцій з плаваючою комою інструкції SSE можуть використовуватися разом з командами ММХ без помітного зниження швидкодії. SSE також підтримує попереджуючу вибірку даних (prefetching), яка є механізмом попереднього прочитування даних з кеш-пам'яті.
Зверніть увагу, що якнайкращий результат використовування нових інструкцій процесора забезпечується тільки при їх підтримці на рівні використовуваних програм. На сьогоднішній день більшість компаній, що займаються розробкою програмного забезпечення, модифікувала програми, пов'язані з обробкою графіки і звуку, що дозволило більш повно використовувати можливості SSE. Наприклад, графічний додаток Adobe Photoshop підтримує інструкції SSE, що значно підвищує ефективність використовування SSE-оснащених процесорів. Підтримка інструкцій SSE вбудована в DirectX 6.1 і в самі останні відео- і аудіодрайвери, що поставляються з операційними системами Windows 98 Second Edition, Windows Me, Windows NT 4.0 (з пакетом оновлення 5 або пізнішим) і Windows 2000.
Інструкції SSE є розширенням технологій ММХ, а SSE2 — розширенням інструкцій SSE. Таким чином, процесори, що підтримують SSE2, підтримують також інструкції SSE, а процесори, що підтримують інструкції SSE, у свою чергу, підтримують оригінальні команди ММХ. Це означає, що стандартні ММХ-програми можуть виконуватися практично на будь-яких системах.
3DNow і Enhanced 3DNowТехнологія 3DNow розроблена компанією AMD у відповідь на реалізацію підтримки інструкцій SSE в процесорах
Intel. Вперше (травень 1998 року) 3DNow реалізована в процесорах AMD Кб, а подальший розвиток — Enhanced 3DNow — ця технологія одержала в процесорах Athlon і Duron. Аналогічно SSE, технології 3DNow і Enhanced 3DNow призначені для прискорення обробки тривимірної графіки, мультимедіа і інших інтенсивних обчислень.
3DNow є набором з 21 інструкції SIMD, які оперують масивом даних у вигляді одиничного елементу. У Enhanced 3DNow до існуючих додані ще 24 нові інструкції. Технології обробки даних 3DNow і Enhanced 3DNow хоча і подібні SSE, але несумісні на рівні інструкцій, тому виробникам програмного забезпечення необхідно окремо реалізувати підтримку цих технологій.
Технологія 3DNow, як і SSE, підтримує операції SIMD з плаваючою комою, а також дозволяє виконувати до чотирьох операцій з плаваючою комою за один цикл. Інструкції 3DNow для операцій з плаваючою комою можуть використовуватися разом з командами ММХ без помітного зниження швидкодії. Підтримується і попереджуюча вибірка даних — механізм попереднього прочитування даних з кеш-пам'яті.
Всі технології прискорення обробки даних компаній Intel і AMD реалізовані на рівні операційних систем Windows 9x і Windows NT/2000. Окрім цього, всі програмні інтерфейси DirectX (з версії 6) компанії Microsoft і Open GL компанії SGI оптимізовані для технології 3DNow, а практично всі сучасні відеодрайвери SDfx, ATI, Matrox і nVidia підтримують 3DNow і Enhanced 3DNow. Не дивлячись на те що технологія 3DNow підтримується багатьма комп'ютерними іграми і драйверами відеоадаптерів, існує ряд професійних графічних програм (до їх числа відноситься і Adobe Photoshop), що не підтримують 3DNow.
Перегрів і охолоджуванняУ комп'ютерах з швидкодійними процесорами можуть виникати серйозні проблеми, пов'язані з перегрівом
мікросхем. Більш швидкодійні процесори споживають велику потужність і відповідно виділяють більше тепла. Для відведення тепла необхідно вживати додаткові заходи, оскільки вбудованого вентилятора може виявитися недостатньо.
Для охолоджування процесора потрібно придбати додатковий теплоотвод (радіатор). В деяких випадках може потрібно нестандартний теплоотвод з більшою площею поверхні (з подовженими ребрами).
Теплоотводи бувають пасивними і активними. Пасивні теплоотводи є простими радіаторами, а активні містять невеликий вентилятор, що вимагає додаткового живлення.
Теплоотводи можуть бути притиснутими до мікросхеми або приклеєними до її корпусу. У першому випадку для поліпшення теплового контакту між радіатором і корпусом мікросхеми їх поверхні слід змазати теплопроводящей пастою. Вона заповнить повітряний зазор, забезпечивши кращу передачу тепла. На мал. 3.19 показані способи з'єднання теплоотвода і процесора.
Ефективність теплоотводов визначається відношенням температури радіатора до розсіюваної потужності. Чим менше це відношення, тим ефективність розсіювання тепла вище. Для збільшення ефективності радіатора в нього вбудовують вентилятори. Такі теплоотводи називаються активними (мал. 3.20). Роз'єм живлення вентилятора схожий на звичний роз'єм живлення накопичувача, але останнім часом випускаються радіатори з вентилятором, який підключається до системної плати.
70

Активні теплоотводи з вбудованим вентилятором випускаються для швидкодійних процесорів, проте у разі відмови такого теплоотвода процесор швидко перегрівається. Вентилятори звичайно підключаються до роз'єму живлення дисковода або спеціального роз'єму живлення 12В для вентилятора на системній платі. Проте нерідко ці вентилятори є дешевими пристроями на підшипниках з гарантією роботи всього на один рік. Коли підшипники зношуються, вентилятор починає видавати скрегіт і зупиняється, що приводить до перегріву процесора і виходу його з ладу.
Мал. 3.21. Елементи охолоджування процесорів Pentium 11/111Надійність пасивних теплоотводов стовідсоткова, оскільки вони не мають ніяких механічних компонентів, що
виходять з ладу. В більшості випадків вони є алюмінієвим радіатором, який розсіює тепло через конвекцію (мал. 3.22). Проте пасивні радіатори не охолоджують процесор достатньою мірою, якщо через їх пластини не протікає потік повітря, звичайно створюваний вентилятором блоку живлення або додатковим вентилятором, встановленим в корпусі. Якщо корпус і блок живлення розроблені з урахуванням розподілу температур, то можна використовувати менш дорогий пасивний теплоотвод замість активного.
Для ефективної роботи радіатора необхідно забезпечити надійний контакт з корпусом процесора. Навіть невеликий повітряний прошарок між процесором і радіатором приведе до перегріву процесора і виходу його з ладу. Для надійності з'єднання тепло-відвідних елементів іноді використовуються спеціальні кріпильні матеріали, наприклад теплопровідний клей. Один з прикладів кріплення радіатора показаний на мал. 3.23.
У більшості нових систем використовується поліпшений формфактор системної платі, званий АТХ. У системах з системною платою і корпусом цього типу поліпшене охолоджування процесора: він встановлений близько від джерела живлення, а вентилятор джерела живлення в більшості систем АТХ встановлений так, що обдуває процесор. І тому в таких системах можна використовувати пасивний теплоотвод (тобто обійтися без вентилятора процесора).
71
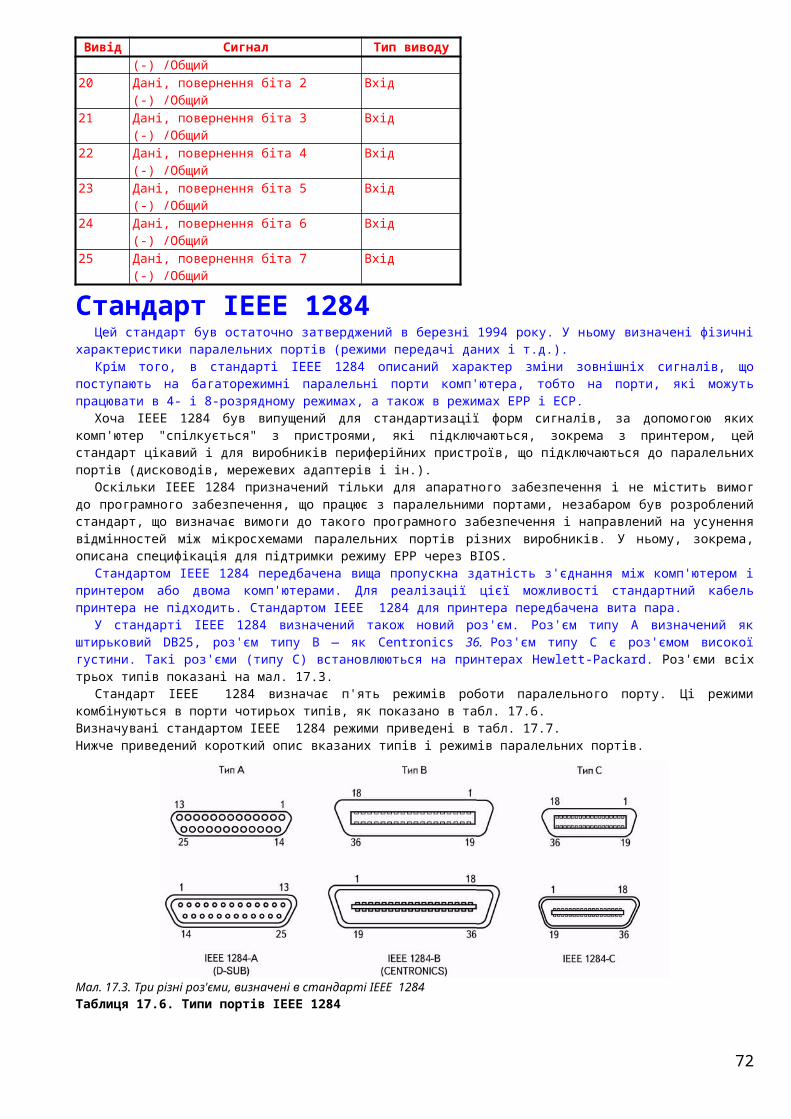
Оперативна пам'ять.Оперативна пам'ять — це робоча область для процесора комп'ютера. У ній під час роботи зберігаються
програми і дані. Оперативна пам'ять часто розглядається як тимчасове сховище, тому що дані і програми в ній зберігаються тільки при включеному комп'ютері або до натиснення кнопки скидання (reset). Перед виключенням або натисненням кнопки скидання всі дані, піддані змінам під час роботи, необхідно зберегти на запам'ятовуючий пристрій, який може зберігати інформацію постійно (звично це жорсткий диск). При новому включенні живлення збережена інформація знов може бути завантажена в пам'ять.
Пристрої оперативної пам'яті іноді називають запам'ятовуючими пристроями з довільним доступом. Це означає, що звернення до даних, що зберігаються в оперативній пам'яті, не залежить від порядку їх розташування в ній. Коли говорять про пам'ять комп'ютера, звичайно мають на увазі оперативну пам'ять, перш за все мікросхеми пам'яті або модулі, в яких зберігаються активні програми і дані, використовувані процесором. Проте іноді термін пам'ять відноситься також до зовнішніх запам'ятовуючих пристроїв, таким як диски і накопичувачі на магнітній стрічці.
За декілька років поняття RAM (Random Access Memory) перетворилося із звичної абревіатури в термін, що позначає основний робочий простір пам'яті, створюване мікросхемами динамічної оперативної пам'яті (Dynamic RAM — DRAM) і використовуване процесором для виконання програм. Однією з властивостей мікросхем DRAM (і, отже, оперативної пам'яті в цілому) є динамічне зберігання даних, що означає, по-перше, можливість багатократного запису інформації в оперативну пам'ять, а по-друге, необхідність постійного оновлення даних (тобто, по суті, їх перезапис) приблизно кожні 15 мс. Також існує так звана статична оперативна пам'ять (Static RAM — SRAM), що не вимагає постійного оновлення даних. Слід помітити, що дані зберігаються в оперативній пам'яті тільки при включеному живленні.
Новачки часто плутають оперативну пам'ять з пам'яттю на диску, оскільки місткість пристроїв пам'яті обох типів виражається в однакових одиницях — мега- або гігабайтах.
Зверніть увагу: оскільки неможливо постійно зберігати файли в оперативній пам'яті, всі змінені після завантаження в пам'ять файли повинні бути знов збережені на жорсткому диску перед виключенням комп'ютера. Якщо змінений файл не буде збережений, то первинна копія файлу на жорсткому диску залишиться незмінною.
Під час виконання програми в оперативній пам'яті зберігаються її дані. Мікросхеми оперативної пам'яті (RAM) іноді називають енергозалежною пам'яттю: після виключення комп'ютера дані, що зберігаються в них, будуть втрачені, якщо вони заздалегідь не були збережені на диску або іншому пристрої зовнішньої пам'яті. Щоб уникнути цього, деякі додатки автоматично роблять резервні копії даних.
Файли комп'ютерної програми при її запуску завантажуються в оперативну пам'ять, в якій зберігаються під час роботи з вказаною програмою. Процесор виконує програмно реалізовані команди, що містяться в пам'яті, і зберігає їх результати. Оперативна пам'ять зберігає коди натиснутих клавіш при роботі з текстовим редактором, а також величини математичних операцій. При виконанні команди Зберегти (Save) вміст оперативної пам'яті зберігається у вигляді файлу на жорсткому диску.
Фізично оперативна пам'ять в системі є набором мікросхем або модулів, що містять мікросхеми, які звичайно підключаються до системної плати. Ці мікросхеми або модулі можуть мати різні характеристики і, щоб функціонувати правильно, повинні бути сумісні з системою, в яку встановлюються.
Як і процесор, пам'ять — один з найдорожчих компонентів сучасного комп'ютера, хоча загальна вартість пам'яті в звичному настільному комп'ютері за останні декілька років знизилася.
Хоча пам'ять значно подешевшала, модернізувати її доводиться набагато частіше, ніж кілька років тому. В даний час нові типи пам'яті розробляються значно швидше, і ймовірність того, що в нові комп'ютери не можна буде встановити пам'ять застарілого типу, як ніколи велика. Тому при заміні системної плати часто доводиться замінювати і пам'ять.
У зв'язку з цим при виборі типу встановлюваної пам'яті слід все добре обдумати і прорахувати, щоб мінімізувати витрати на майбутню модернізацію (або ремонт).
У сучасних комп'ютерах використовуються запам'ятовуючі пристрої трьох основних типів:• ROM (Read Only Memory). Постійний пристрій (ПЗП), що запам'ятовує, не здатний виконувати
операцію запису даних.
72

• DRAM (Dynamic Random Access Memory). Динамічний пристрій, що запам'ятовує, з • довільним порядком вибірки.• SRAM (Static RAM). Статична оперативна пам'ять.
Пам'ять типа ROMУ пам'яті типа ROM (Read Only Memory), або ПЗП, дані можна тільки зберігати, змінювати їх не
можна. Саме тому така пам'ять використовується тільки для читання даних. ROM також часто називається незалежною пам'яттю, тому що будь-які дані, записані в неї, зберігаються при виключенні живлення. Тому в ROM поміщаються команди запуску персонального комп'ютера, тобто програмне забезпечення, яке завантажує систему.
Помітьте, що ROM і оперативна пам'ять — не протилежні поняття. Насправді ROM є частиною оперативної пам'яті системи. Іншими словами, частина адресного простору оперативної пам'яті відводиться для ROM. Це необхідно для зберігання програмного забезпечення, яке дозволяє завантажити операційну систему.
Основний код BIOS міститься в мікросхемі ROM на системній платі, але на плати адаптерів також є аналогічні мікросхеми. Вони містять допоміжні підпрограми базової системи вводу-виводу і драйвери, необхідні для конкретної плати, особливо для тієї плати, яка повинна бути активізовані на ранньому етапі початкового завантаження, наприклад відеоадаптер. Плата, не потребуюча в драйверах на ранньому етапі початкового завантаження, звичайно не має ROM, тому що їх драйвери можуть бути завантажені з жорсткого диска пізніше — в процесі початкового завантаження.
В даний час в більшості систем використовується одна з форм Rash-пам'яті, яка називається електронно-перепрограміруємою постійною пам'яттю (Electrically Erasable Programmable Read-only Memory— EEPROM). Rash-пам'ять є по-справжньому незалежною і перезаписуваною, вона дозволяє користувачам легко модифікувати ROM, програмно-апаратні засоби системної плати і інших компонентів (таких, як відеоадаптери, плата SCSI, периферійні пристрої і т.п.).
Пам'ять типа DRAMДинамічна оперативна пам'ять (Dynamic RAM — DRAM) використовується в більшості систем
оперативної пам'яті сучасних персональних комп'ютерів. Основна перевага пам'яті цього типу полягає у тому, що її комірки упаковані дуже щільно, тобто в невелику мікросхему можна упакувати багато бітів, а значить, на їх основі можна побудувати пам'ять великої ємності.
Елементи пам'яті в мікросхемі DRAM — це крихітні конденсатори, які утримують заряди. Саме так (наявністю або відсутністю зарядів) і кодуються біти. Проблеми, пов'язані з пам'яттю цього типу, викликані тим, що вона динамічна, тобто повинна постійно регенеруватися, оскільки інакше електричні заряди в конденсаторах пам'яті "стікатимуть" і дані будуть втрачені. Регенерація відбувається, коли контроллер пам'яті системи бере крихітну перерву і звертається до всіх рядків даних в мікросхемах пам'яті. Більшість систем має контроллер пам'яті (звичайно вбудовуваний в набір мікросхем системної плати), який налаштований на відповідну промисловим стандартам частоту регенерації, рівну 15 мкс. До всіх рядків даних обіг здійснюється після проходження 128 спеціальних циклів регенерації. Це означає, що кожні 1,92 мс (128x15 мкс) прочитуються всі рядки в пам'яті для забезпечення регенерації даних.
Регенерація пам'яті, на жаль, віднімає час у процесора: кожен цикл регенерації по тривалості займає декілька циклів центрального процесора. У старих комп'ютерах цикли регенерації могли займати до 10% (або більше) процесорного часу, але в сучасних системах, що працюють на частотах, рівних сотням мегагерц, витрати на регенерацію складають 1% (або менше) процесорного часу. Деякі системи дозволяють змінити параметри регенерації за допомогою програми установки параметрів CMOS, але збільшення часу між циклами регенерації може привести до того, що в деяких елементах пам'яті заряд стече, а це викличе збої пам'яті. В більшості випадків надійніше дотримуватися рекомендованої або заданої за змовчуванням частоти регенерації. Оскільки витрати на регенерацію в сучасних комп'ютерах складають менше 1%, зміна частоти регенерації робить незначний вплив на характеристики комп'ютера.
У пристроях DRAM для зберігання одного біта використовується тільки один транзистор і пара конденсаторів, тому вони більш місткі, ніж мікросхеми інших типів пам'яті. В даний час є мікросхеми динамічної оперативної пам'яті місткістю 512 Мбайт і більше. Це означає, що подібні мікросхеми містять більше 256 млн. транзисторів! Адже Pentium 4 має тільки 42 млн. транзисторів. Звідки така різниця? Річ у тому, що в мікросхемі пам'яті всі транзистори і конденсатори розміщуються послідовно, звично у вузлах квадратних решіток, у вигляді дуже простих, періодично повторюваних структур, на відміну від процесора, що є складнішою схемою різних структур, що не має чіткої організації.
Транзистор для кожного однорозрядного регістра DRAM використовується для читання стану суміжного конденсатора. Якщо конденсатор заряджений, в комірці записана 1; якщо заряду немає —
73

записаний 0. Заряди в крихітних конденсаторах весь час стікають, от чому пам'ять повинна постійно регенеруватися. Навіть миттєве переривання подачі живлення або який-небудь збій в циклах регенерації приведе до втрати заряду в комірці DRAM, а отже, і до втрати даних.
Динамічна оперативна пам'ять використовується в персональних комп'ютерах; оскільки вона недорога, мікросхеми можуть бути щільно упаковані, а це означає, що запам'ятовуючий пристрій великої ємності може займати невеликий простір. На жаль, пам'ять цього типу не відрізняється високою швидкодією, звичайно вона набагато "повільніша" за процесор. Тому існує безліч різних типів організації DRAM, дозволяючих поліпшити цю характеристику.
Кеш-пам'ять — SRAMІснує тип пам'яті, досконало відмінний від інших, — статична оперативна пам'ять (Static RAM —
SRAM). Вона названа так тому, що, на відміну від динамічної оперативної пам'яті (DRAM), для збереження її вмісту не вимагається періодичної регенерації. Але це не єдина її перевага. SRAM має вищу швидкодію, ніж динамічна оперативна пам'ять, і може працювати на тій же частоті, що і сучасні процесори.
Час доступу SRAM не більш 2 нс; це означає, що така пам'ять може працювати синхронно з процесорами. Проте для зберігання кожного біта в конструкції SRAM використовується кластер з шести транзисторів. Використання транзисторів без яких-небудь конденсаторів означає, що немає необхідності в регенерації. (Адже якщо немає ніяких конденсаторів, то і заряди не втрачаються.) Поки подається живлення, SRAM пам'ятатиме те, що збережене. Чому ж тоді мікросхеми SRAM не використовуються для всієї системної пам'яті? Відповідь можна знайти в наступній таблиці.
Тип Швидкодія Густина Вартість
Динамічна оперативна пам'ять Низьке Висока Низька Статична оперативна пам’ять SRAM
Високе Низька Висока В порівнянні з динамічною оперативною пам'яттю швидкодія SRAM набагато вища, але густина її набагато
нижча, а ціна досить висока. Нижча густина означає, що мікросхеми SRAM мають великі габарити, хоча їх інформаційна місткість набагато менше. Велике число транзисторів і кластеризоване їх розміщення не тільки збільшує габарити мікросхем SRAM, але і значно підвищує вартість технологічного процесу в порівнянні з аналогічними параметрами для мікросхем DRAM. Наприклад, місткість модуля DRAM може дорівнювати 64 Мбайт або більше, тоді як місткість модуля SRAM приблизно того ж розміру складає тільки 2 Мбайт, причому їх вартість буде однаковою. Таким чином, габарити SRAM в середньому в 30 разів перевищують розмір динамічної оперативної пам'яті, те ж саме можна сказати і про вартість. Все це не дозволяє використовувати SRAM як оперативної пам'яті в персональних комп'ютерах.
Не дивлячись на це, розробники все-таки застосовують пам'ять типа SRAM для підвищення ефективності PC. Але щоб уникнути значного збільшення вартості встановлюється тільки невеликий об'єм високошвидкісної SRAM, яка використовується як кеш-пам'ять. Кеш пам’ять працює на тактових частотах, близьких або навіть рівних тактовим частотам процесора, причому звичайно саме ця пам'ять безпосередньо використовується процесором при читанні і записі. Під час операцій читання дані у високошвидкісну кеш-пам'ять заздалегідь записуються з оперативної пам'яті з низькою швидкодією, тобто з DRAM.
Ще недавно час доступу динамічної оперативної пам'яті був не менше 60 нс (що відповідають тактовій частоті 16 Мгц). Коли процесор персонального комп'ютера працював на тактовій частоті 16 Мгц і нижче, DRAM могла бути синхронізована з системною платою і процесором, тому кеш був не потрібен. Проте, як тільки тактова частота процесора піднялася вище 16 Мгц, синхронізувати DRAM з процесором стало неможливо, і саме тоді розробники почали використовувати SRAM в персональних комп'ютерах. Це відбулося в 1986 і 1987 роках, коли з'явилися PC з процесором 386, працюючим на частотах 16 і 20 Мгц. Саме в цих персональних комп'ютерах вперше знайшла застосування так звана кеш-пам'ять, тобто високошвидкісний буфер, побудований на мікросхемах SRAM, який безпосередньо обмінюється даними з процесором. Оскільки швидкодія кеша може бути порівнянне з швидкодією процесора, контроллер кеша може передбачати потреби процесора в даних і заздалегідь завантажувати необхідні дані у високошвидкісну кеш-пам'ять. Тоді при видачі процесором адреси пам'яті дані можуть бути передані з високошвидкісного кеша, а не з оперативної пам'яті, швидкодія якої набагато нижча.
Ефективність кеш-пам'яті виражається коефіцієнтом збігу, або коефіцієнтом успіху. Коефіцієнт збігу рівний відношенню кількості вдалого обігу в кеш до загальної кількості обігу. Попадання — це подія, що полягає у тому, що необхідні процесору дані заздалегідь прочитуються в кеш з оперативної пам'яті; інакше кажучи, у разі попадання процесор може прочитувати дані з кеш-пам'яті. Невдалим обігом в кеш вважається таке, при якому контроллер кеша не передбачив потреби в даних, що знаходяться за вказаною абсолютною адресою. У такому разі необхідні дані не були заздалегідь подані в кеш-пам'ять, тому процесор повинен відшукати їх в повільнішій оперативній пам'яті, а не в швидкодійному кеші. Коли
74

процесор прочитує дані з оперативної пам'яті, йому доводиться якийсь час "чекати", оскільки тактова частота оперативної пам'яті значно нижче, ніж процесора. Якщо процесор працює на частоті 233 Мгц, то тривалість його циклу рівна приблизно 4 нс, тоді як тривалість циклу оперативної пам'яті може складати 60 нс, що відповідають тактовій частоті 16 Мгц. Таким чином, кожного разу, коли процесор прочитує дані з оперативної пам'яті, його робота сповільнюється. Це настільки відчутно, що здається, ніби він працює на тактовій частоті 16 Мгц! Уповільнення обумовлене станом очікування. Якщо процесор знаходиться в стані очікування, то впродовж всього циклу (такту) ніякі операції не виконуються; процесор, по суті, чекає, поки необхідні дані поступлять з повільнішої оперативної пам'яті. Тому саме кеш-пам'ять дозволяє скоротити кількість "простоїв" і збільшити швидкодію комп'ютера в цілому.
Щоб мінімізувати час очікування при прочитуванні процесором даних з повільної оперативної пам'яті, в сучасних персональних комп'ютерах звичайно передбачені два типи кеш-пам'яті: кеш-пам'ять першого рівня (L1) і кеш-пам'ять другого рівня (L2). Кеш пам’ять першого рівня також називається вбудованим або внутрішнім кешем; він безпосередньо вбудований в процесор і фактично є частиною мікросхеми процесора. У всіх процесорах 486 і вище кеш-пам'ять першого рівня інтегрована в мікросхему процесора.
Кеш-пам'ять другого рівня називається вторинним або зовнішнім кешем; він встановлюється поза мікросхемою процесора. Спочатку вона встановлювалася на системній плати. (Так було у всіх комп'ютерах на основі процесорів 386, 486 і Pentium.) Якщо кеш-пам'ять другого рівня встановлена на системній платі, то вона працює на її частоті. В цьому випадку кеш-пам'ять другого рівня звичайно знаходиться поряд з роз'ємом процесора.
Для підвищення ефективності в пізніших комп'ютерах на основі процесорів Pentium Pro, Pentium II/III і Athlon кеш-пам'ять другого рівня є частиною процесора. Звичайно ж, він зовнішній по відношенню до кристала центрального процесора, просто ця окрема мікросхема встановлюється усередині корпусу (картріджа) процесора. Тому на системній платі для процесорів Pentium Pro або Pentium II немає ніякого кеша. У останніх моделях процесорів Pentium Ш і Athlon кеш-пам'ять другого рівня є частиною мікросхеми процесора (подібно кеш-пам'яті першого рівня) і працює на вищих частотах (на частоті процесора, половинної або третини). У процесорах Itanium для збільшення продуктивності використовується три рівні кеш-пам'яті.
Швидкий посторінковий режим динамічної оперативної пам'ятіЩоб скоротити час очікування, стандартна пам'ять DRAM розбивається на сторінки. Звичайно для
доступу до даних в пам'яті вимагається вибрати рядок і стовпець адреси, що займає якийсь час. Розбиття на сторінки забезпечує швидший доступ до всіх даних в межах деякого рядка пам'яті, тобто якщо змінюється не номер рядка, а тільки номер стовпця. Такий режим доступу до даних в пам'яті називається (швидким) посторінковим режимом (Fast Page Mode), а сама пам'ять — пам'яттю Fast Page Mode. Інші варіації посторінкового режиму називаються Static Column або Nibble Mode.
Сторінкова організація пам'яті — проста схема підвищення ефективності пам'яті, відповідно до якої пам'ять розбивається на сторінки завдовжки від 512 байт до декількох кілобайт. Електронна схема перегортування дозволяє при зверненні до елементів пам'яті в межах сторінки зменшити кількість станів очікування. Якщо потрібний елемент пам'яті знаходиться поза поточною сторінкою, то додається одне або більше станів очікування, оскільки система вибирає нову сторінку.
Щоб збільшити швидкість доступу до пам'яті, були розроблені інші схеми доступу до динамічної оперативної пам'яті. Однією з найістотніших змін було упровадження пакетного (burst) режиму доступу в процесорі 486 і пізніших. Переваги пакетного режиму доступу виявляються тому, що в більшості випадків доступ до пам'яті є послідовним. Після установки рядка і стовпця адреси в пакетному режимі можна звертатися до наступних трьох суміжних адрес без додаткових станів очікування. Проте доступ в пакетному режимі звичайно обмежується чотирма операціями. Щоб пояснити це, звернемося до схеми синхронізації по кількості циклів для кожної операції доступу. Схема синхронізації типового доступу в пакетному режимі для стандартної динамічної оперативної пам'яті виглядає таким чином: х-у-у-у, де х — час виконання першої операції доступу (тривалість циклу плюс час очікування), а у — число циклів, необхідних для виконання кожної подальшої операції доступу.
Схема синхронізації в пакетному режимі для стандартної DRAM з часом доступу 60 нc звичайно виглядає так: 5-3-3-3. Це означає, що перша операція доступу займає п'ять циклів на системній шині з частотою 66 Мгц, що приблизно рівно 75 (5x15 нc; 15 нc — тривалість одного циклу) нc, тоді як подальші операції займають по три цикли кожна (3x15 нc = 45 нc). Помітьте, що без розбиття на сторінки схема доступу до пам'яті виглядала б як 5-5-5-5, тому що для кожної передачі даних запам'ятовуючому пристрою потрібно б один і той же час очікування.
75

DRAM, підтримуюча розбиття на сторінки і пакетний режим, називається пам'яттю з швидким посторінковим режимом (Fast Page Memory— FPM). Цим підкреслюється, що для доступу до даних в пам'яті без зміни сторінки потрібна менша кількість циклів очікування. У більшості комп'ютерів 486 і новіших використовується пам'ять FPM, а в старіші комп'ютери встановлювали звичну динамічну оперативну пам'ять.
Інший метод прискорення пам'яті FPM називається чергуванням. Цей метод використовує спільно два окремі банки пам'яті, розподіляючи парні і непарні байти між цими банками. Коли відбувається звернення до одного банку, в іншому банку вибираються рядок і стовпець адреси. До моменту закінчення вибірки даних в першому банку в другому закінчаться цикли очікування і він буде готовий до вибірки даних. Коли дані вибираються з другого банку, в першому йде процес вибірки рядка і стовпця адреси для наступної операції доступу. Це поєднання (перекриття за часом) операцій доступу в двох банках приводить до зменшення часу очікування і забезпечує швидший пошук даних. Єдина проблема полягає у тому, що для використання цього методу необхідно встановити ідентичні пари банків, а при цьому подвоюється кількість мікросхем SIMM або DIMM. Чергування широко використовувалося в 32-розрядних пристроях, що запам'ятовують, для процесора 486, але малоефективно у разі 64-розрядної пам'яті в процесорі Pentium. Щоб використовувати чергування пам'яті в Pentium, необхідно встановити 128-розрядну пам'ять, тобто чотири мікросхеми SIMM з 72-ма контактами або дві мікросхеми DIMM.
Оперативна пам'ять EDOПочинаючи з 1995 року в комп'ютерах на основі Pentium використовується новий тип оперативної пам'яті
— EDO (Extended Data Out). Це вдосконалений тип пам'яті FPM; його іноді називають Hyper Page Mode. Пам'ять типа EDO була розроблена і запатентована компанією Micron Technology (пізніше ліцензії придбали багато інших виготівників). Пам'ять EDO збирається із спеціально виготовлених мікросхем, які враховують перекриття синхронізації між черговими операціями доступу. Як випливає з назви — Extended Data Out, драйвери виводу даних на мікросхемі, на відміну від FPM, не вимикаються, коли контроллер пам'яті видаляє стовпець адреси на початку наступного циклу. Це дозволяє сумістити (за часом) наступний цикл з попереднім, економлячи приблизно 10 нс в кожному циклі.
Таким чином, контроллер пам'яті EDO може почати виконання нової команди вибірки стовпця адреси, а дані прочитуватимуться за поточною адресою. Це майже ідентично використанню різних банків для чергування пам'яті, але, на відміну від чергування, не потрібно одночасно встановлювати два ідентичні банки пам'яті в системі.
Для оперативної пам'яті EDO схема синхронізації в пакетному режимі має вигляд 5-2-2-2, а не 5-3-3-3, як для стандартної пам'яті Fast Page Mode. Це означає, що чотири передачі даних з пам'яті EDO займають 11 повних системних циклів (порівняйте з 14-ма повними циклами для пам'яті FPM). Завдяки цьому при проведенні спеціальних тестів швидкодія збільшилася на 22%, проте у фактичних випробуваннях пам'яті EDO на еталонних тестах швидкодія всієї системи звичайно збільшується приблизно на 5%. Хоча таке збільшення може показатися зовсім невеликим, головна перевага EDO полягає у тому, що в пристроях подібного типу використовуються ті ж самі мікросхеми динамічної оперативної пам'яті, що і в FPM. І вартість пристроїв рівна вартості пам'яті FPM. Але при цьому EDO володіє вищою ефективністю, ніж FPM.
Для того, щоб використовувати пам'ять EDO, набір мікросхем системної логіки на системній плати повинен підтримувати її. Більшість подібних наборів мікросхем, починаючи з набору 430FX (Triton), випущеного компанією Intel в 1995 році, підтримують EDO. Оскільки мікросхеми пам'яті EDO коштували стільки ж, скільки і стандартні мікросхеми, Intel, а вслід за нею і решта виробників стала підтримувати EDO у всіх наборах мікросхем системної логіки.
Оперативна пам'ять EDO ідеальна для систем з швидкодією шини до 66 Мгц. Такі шини в персональних комп'ютерах використовувалися до 1997 року включно; проте протягом 1998 року пам'ять EDO була замінена новішою і швидшою пам'яттю SDRAM (Synchronous DRAM — синхронна DRAM). Ця нова архітектура стала новим стандартом оперативної пам'яті персонального комп'ютера.
Burst EDOПам'ять Burst Extended-Data-Out Dynamic Random Access Memory (Burst EDO, BEDO DRAM) є
різновидом пам'яті EDO. Це в основному та ж пам'ять, що і EDO, але з ще швидшою передачею даних. На жаль, тільки один набір мікросхем системної логіки (Intel 440FX Natoma) підтримував її, і вона була швидко замінена пам'яттю SDRAM, яка підтримується в переважній більшості наборів мікросхем. Пам'ять BEDO в даний час не використовується і не виробляється.
SDRAMЦе тип динамічної оперативної пам'яті DRAM, робота якої синхронізується з шиною пам'яті. SDRAM
(Synchronous DRAM) передає інформацію у високошвидкісних пакетах, що використовують
76
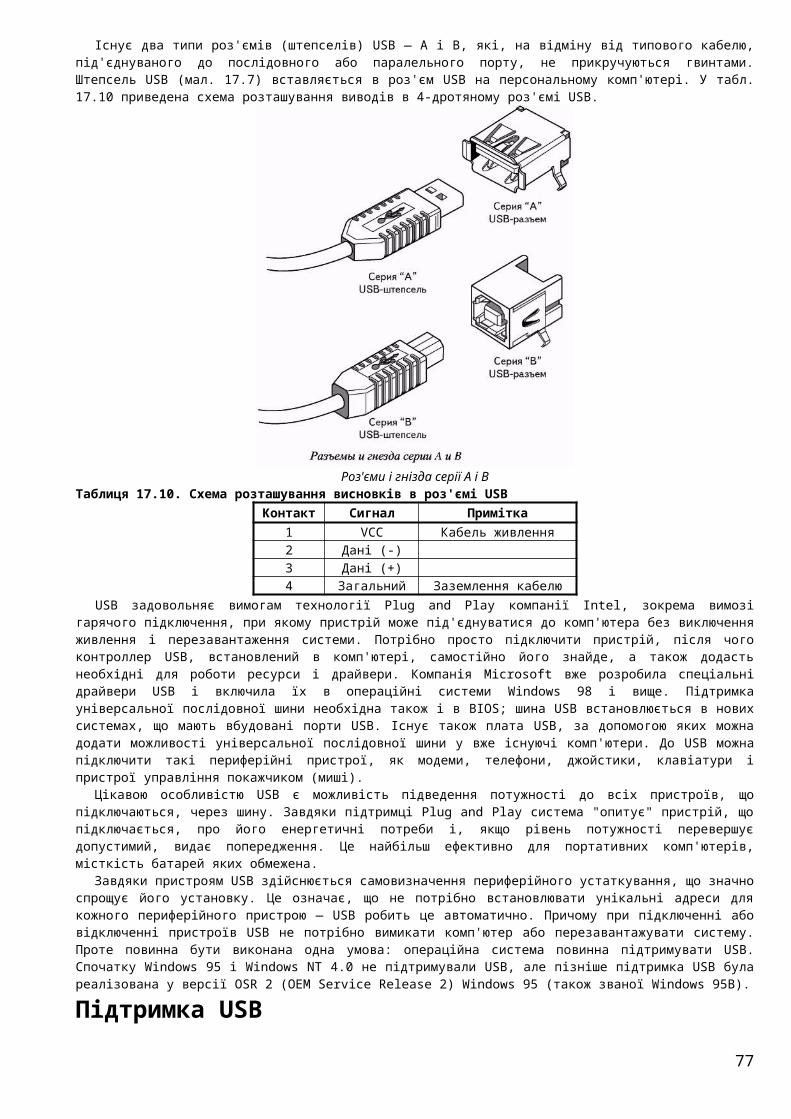
високошвидкісний синхронізований інтерфейс. SDRAM дозволяє уникнути використання більшості циклів очікування, необхідних при роботі асинхронної DRAM, оскільки сигнали, по яких працює пам'ять такого типу, синхронізовані з тактовим генератором системної плати.
Як і для оперативної пам'яті EDO, для пам'яті цього типу потрібна підтримка набором мікросхем системної логіки. Починаючи з наборів 430VX і 430ТХ, випущених в 1997 році, всі набори мікросхем системної логіки компанії Intel повністю підтримують SDRAM; це найпопулярніший тип пам'яті для нових систем. SDRAM добре підходить для архітектури Pentium II/III і нової високоефективної системної плати.
Ефективність SDRAM значно вища в порівнянні з оперативною пам'яттю FPM або EDO. Оскільки SDRAM — це тип динамічної оперативної пам'яті, її початковий час очікування такий ж, як у FPM або EDO, але загальний час циклу набагато коротший. Схема синхронізації пакетного доступу SDRAM виглядає так: 5-1-1-1, тобто чотири операції читання завершуються всього лише за вісім циклів системної шини (порівняйте з 11-у циклами для EDO і 14-у для FPM).
Окрім цього, пам'ять SDRAM може працювати на частоті 100 Мгц (10 нс) і вище, що стало новим стандартом для системної швидкодії починаючи з 1998 року. Фактично всі нові персональні комп'ютери, продані в 1998 році, мають пам'ять типа SDRAM. Останні оновлення SDRAM підтримують робочу частоту 133 Мгц (згідно специфікації PC 133).
Пам'ять SDRAM поставляється у вигляді модулів DIMM і, як правило, її швидкодія оцінюється в мегагерцах, а не в наносекундах.
Таблиця 6.5. Швидкодія пам'яті SDRAMТривалість циклу, нс Частота, Мгц Специфікація
15 66 РС66 10 100 РС66 8 125 РС100 7,5 133 РС133
Хоча швидкодії SDRAM істотно вище, ніж у пам'яті попередніх типів, вартує вона не набагато дорожче, тому їй і вдалося так швидко завоювати тверді позиції на ринку PC.
Нові типи динамічної оперативної пам'ятіDDR SDRAM
Пам'ять DDR (Double Data Rate — подвійна швидкість передачі даних) — це ще більш вдосконалений стандарт SDRAM, при використанні якого швидкість передачі даних подвоюється. Це досягається не за рахунок подвоєння тактової частоти, а за рахунок передачі даних двічі за один цикл: перший раз на початку циклу, а другий — в кінці. Саме завдяки цьому і подвоюється швидкість передачі (причому використовуються ті ж самі частоти і синхронізуючі сигнали).
Пам'ять DDR пропонується такими випускаючими процесори компаніями, як AMD і Cyrix, і такими виготівниками наборів мікросхем системної логіки, як VIA Technologies, ALi (Acer Labs, Inc.) і SiS (Silicon integrated Systems). Ця дешева пам'ять (для виробництва якої не потрібна ліцензія) будується на основі мікросхем RDRAM. Компанія Intel в своїх нових високопродуктивних комп'ютерах випуску 1999 року встановлює тільки мікросхеми RDRAM, а пам'ять DDR — в дешевих персональних комп'ютерах. Офіційно стандартизація DDR була зроблена Консорціумом DDR, в який входять компанії Fujitsu, Ltd., Hitachi, Ltd., Hyundai Electronics Industries Co., Mitsubishi Electric Corp., NEC Corp., Samsung Electronics Co., Texas Instruments, Inc. і Toshiba Corp. В основному пам'ять DDR SDRAM використовується в системах, оснащених процесорами компаній AMD і Cyrix.
Пам'ять DDR SDRAM випускається у вигляді 184-контактних модулів DIMM.Модулі DIMM пам'яті DDR SDRAM випускаються відзначаються своєю швидкодією і звичайно
працюють при напрузі 2,5 В. Вони є, по суті, розширення модулів DIMM пам'яті PC 100 або РС133 і призначені для підтримки подвоєної синхронізації, при якій передача даних, на відміну від стандарту SDRAM, відбувається при кожному тактовому переході (двічі за один цикл).
Тип модуля DIMM Ширина шини, байт
Частота шини, МГц
К-сть циклів даних за такт
Пропускна здатність, Мбайт/с
PC 66 SDRAMM 64 66 1 533PC 100 SDRAMM 64 100 1 800PC 133 SDRAMM 64 133 1 1066PC 1600 DDR-SDRAMM 64 100 2 1600PC 2100 DDR-SDRAMM 64 133 2 2133PC 2400 DDR-SDRAMM 64 150 2 2400PC 2400 DDR-SDRAMM 64 167 2 2666
77
PC 2700 DDR-SDRAMM 64 183 2 2933PC 3200 DDR-SDRAMM 64 200 2 3200PC 4300 DDR-SDRAMM 64 267 2 4266
RDRAMРадикально новий тип пам'яті RDRAM, або Rambus DRAM, використовується у високопродуктивних
персональних комп'ютерах з 1999 року. Така пам'ять безпосередньо підтримується в наборах мікросхем системної логіки. Аналогічний тип пам'яті вже використовувався в ігрових приставках — в популярній моделі Nintendo 64.
Звичні типи пам'яті (FPM/RDO і SDRAM) іноді називають пристроями з широким каналом. Ширина каналу пам'яті рівна ширині шини даних процесора (у системах Pentium — 64 біт). Максимальна продуктивність пам'яті SDRAM у виконанні DIMM складає 100x8 (частота х кількість передаваних даних за один такт), або 800 Мбайт/с.
В той же час пам'ять RDRAM є пристроєм з вузьким каналом передачі даних. Кількість даних, передаваних за один такт, досягає тільки 16 біт (2 байт), не рахуючи двох додаткових бітів контролю по парності, проте швидкість передачі даних набагато вища.
Мал. 6.2. 184-контактний модуль DIMM пам'яті DDR SDRAMМікросхеми RDRAM збільшують пропускну здатність пам'яті: у них передбачена "подвоєна" (16-
розрядна) шина передачі даних, частота збільшена до 800 Мгц, а пропускна здатність рівна 1,6 Гбайт/с. Для підвищення продуктивності можна використовувати двух- і чотирьохканальні RDRAM, які дозволяють збільшити швидкість передачі даних до 3,2 або 6,4 Гбайт/с відповідно. В перших моделях Pentium IV використовувалися обидва банки, одночасно створюючи двоканальну структура з пропускною здатністю 3,2 Гбайт/с.
Сучасні модулі RIMM працюють на тільки з вихідною частотою 800МГц, але і з частотами 1066 і 1200 МГц та існують як о одоканальних 16-розрядних так і в багатоканальних 32- та 64-розрядних версіях, пропускна здатність яких становить 9,6 Гбайт/с.
Один канал пам'яті Rambus може підтримувати до 32 окремих пристроїв RDRAM (мікросхем RDRAM), які встановлюються в модулі RIMM (Rambus Inline Memory Modules). Вся робота з пам'яттю організовується між контроллером пам'яті і окремим (а не всіма) пристроєм. Кожні 10 (100 Мгц) нс одна мікросхема RDRAM може передавати 16 байт. RDRAM працює швидше SDRAM приблизно в три рази.
Для підвищення продуктивності було запропоноване ще одне конструктивне рішення: передача управляючої інформації відокремлена від передачі даних по шині. Для цього передбачені незалежні схеми управління, а на адресній шині виділені дві групи контактів: для команд вибору рядка і стовпця і для передачі інформації по шині даних шириною 2 байти. Шина пам'яті працює на частоті 400 Мгц; проте дані передаються по фронтах тактового сигналу, тобто двічі в тактовому імпульсі. Права межа тактового імпульсу називається парним циклом, а ліва — непарним. Синхронізація здійснюється за допомогою передачі пакетів даних на початку парного циклу. Максимальний час очікування складає 2,5 нс.
На мал. 6.3 показане відношення між тактовим сигналом і циклами передачі даних. П'ять повних циклів тактового сигналу відповідають десяти циклам даних.
Архітектура RDRAM також підтримує множинні транзакції, що чергуються, одночасно виконувані в окремих тимчасових областях. Отже, передача даних може бути здійснена до завершення попередньої передачі.
Не менш важливе те, що пам'ять RDRAM споживає мало енергії. Напруга живлення модулів пам'яті RIMM, як і пристроїв RDRAM, досягає тільки 2,5 В. Напруга низьковольтних сигналів змінюється від 1,0 до 1,8 В, тобто перепад напруг рівний 0,8 В. Кроме того, RDRAM має чотири режими зниженого споживання енергії і може автоматично переходити в режим очікування на завершальній стадії транзакції, що дозволяє ще більше економити споживану потужність.
Як згадувалося раніше, мікросхеми RDRAM встановлюються в модулі RIMM (мал. 6.4), за розміром і формою подібні DIMM, але не взаємозамінні. В даний час доступні модулі пам'яті RIMM місткістю 1 Гбайт і більш.
78

Контроллер пам'яті RDRAM з одним каналом Rambus дозволяє встановити не більш три модулі RIMM.
Мал. 6.3. Відношення між тактовим сигналом і циклами передачі даних пам'яті RDRAM
Мал. 6.4. 184-контактний модуль RIMM
Компанія Intel сконцентрувала свої зусилля на упровадженні пам'яті Rambus, що, здавалося, дозволило б досягти значного успіху на ринку. На жаль, затримки у випуску відповідних наборів мікросхем, виниклі через технічні складнощі конструкції пам'яті RDRAM, послужили причиною збільшення вартості модулів пам'яті RIMM в три або більше рази в порівнянні з модулями DIMM того ж об'єму. Не дивлячись на високу ефективність RDRAM, пам'ять DDR SDRAM зараз набагато більш популярна, не говорячи вже про її низьку вартість. Компанія Rambus одержала, до засмучення виробників мікросхем пам'яті, патенти на стандартну пам'ять і конструкції DDR SDRAM. Тому компанії, що виробляють пам'ять SDRAM, DDR або RDRAM, зобов'язані відраховувати певну суму Rambus. Судові розгляди, збуджені компаніями, які намагаються оспорити ці патенти, відчутних результатів поки не принесли.
Модулі SIMM і DIMMСпочатку оперативна системна пам'ять встановлювалася у вигляді окремих мікросхем, які завдяки своїй
конструкції одержали назву мікросхем з дворядним розташуванням виводів (Dual Inline Package — DIP). Системна плата оригінальних систем IBM XT і AT містила до 36 роз'ємів, призначених для підключення мікросхем пам'яті. Надалі мікросхеми пам'яті встановлювалися на окремій плати, яка, у свою чергу, підключалася в роз'єми шини. Я дотепер пам'ятаю, скільки часу віднімала ця утомлива і одноманітна робота.
При використовуванні мікросхем DIP, що вимагають істотних витрат часу і сил, виникала ще одна сумно відома проблема: через якийсь час, в результаті термодинамічних циклів мікросхеми пам'яті виходили з своїх гнізд. Це було пов'язано з періодичним нагріванням і охолоджуванням комп'ютера, виникаючим при включенні і виключенні живлення. Кінець кінцем це приводило до втрати контактів і появи помилок пам'яті. На щастя, для вирішення цієї проблеми було достатньо повторно вставити мікросхему у відповідне кубло.
У одному з альтернативних варіантів мікросхеми пам'яті упаювалися в системну плату або плату розширення. Це дозволяло уникнути втрати контактів і робило з'єднання надійнішим, але в той же час викликало іншу проблему. При пошкодженні однієї з мікросхем пам'яті на її місце доводилося упаювати іншу або вдаватися до заміни системної плати або плати розширення, на якій вона була встановлена. В результаті вартість такої пам'яті була дуже високою.
Модуль пам'яті, що об'єднав в собі всі необхідні властивості, одержав назву SIMM. У сучасних системах використовуються модулі пам'яті з однорядним розташуванням виводів (Single Inline Memory Module — SIMM), з дворядним розташуванням виводів (Dual Inline Memory Module — DIMM) або, як альтернатива окремим мікросхем пам'яті, модулі RIMM. Модулі пам'яті є платою невеликого розміру, що підключаються в спеціальні роз'єми системної плати або плати розширення. Мікросхеми пам'яті упаюються прямо в плату модуля, а тому їх видалення або заміна неможливі. Тому у разі пошкодження окремої мікросхеми доведеться замінити весь модуль пам'яті. По суті, модуль пам'яті можна вважати однією мікросхемою RAM великої ємкості.
79

На сьогоднішній день існує два основні типи модулів SIMM, два основні типи модулів DIMM і лише один тип модулів RIMM. Всі вони використовуються в настільних системах. Типи модулів розрізняються кількістю виводів, шириною рядки пам'яті або типом використовуваної пам'яті.
Існує, наприклад, два основні типи модулів SIMM: 30-контактний (8 біт плюс 1 додатковий біт контролю парності) і 72-контактний (32 біт плюс 4 додаткові біти контролю парності), володіючі різними властивостями. 30-контактний модуль SIMM має менші розміри, причому мікросхеми пам'яті можуть бути розташовані як на одній стороні плати, так і на обох.
Також є два типи модулів DIMM. Модулі пам'яті DIMM звичайно містять стандартні мікросхеми SDRAM або DDR SDRAM і відрізняються один від одного фізичними характеристиками. Стандартний модуль DIMM має 168 виводів, по одному пазу радіусу з кожної сторони і два пази у області контакту. Модулі DDR DIMM, у свою чергу, мають 184 виводи, по два пази з кожної сторони і лише один паз у області контакту. Ширина тракту даних модулів DIMM може бути рівна 64 розрядам (без контролю парності) або 72 розрядам (з контролем парності або підтримкою коду корекції помилок ЕСС). На кожній стороні плати DIMM розташовані різні виводи сигналу. Саме тому вони називаються модулями пам'яті з дворядним розташуванням виводів. Ці модулі приблизно на один дюйм (25 мм) довші за модулі SIMM, але завдяки своїм властивостям містять набагато більше виводів.
Модуль пам'яті RIMM також двосторонній. На сьогоднішній день існує тільки один 184-контактний модуль, що має по одному пазу радіусу з кожної сторони і два пази, розташовані в центральній частині області контакту. Ширина тракту даних модуля RIMM досягає 16 (без підтримки коду корекції помилок) або 18 біт (з підтримкою коду корекції помилок).
На мал. 6.5-6.7 показані типові 30- і 72-контактні модулі SIMM, а також 168-контактний модуль SDRAM DIMM.
Модулі пам'яті вельми компактні, враховуючи їх місткість. В даний момент існує декілька їх різновидів, які відрізняються різною місткістю і швидкодією. У табл. 6.6 приведені ємкості 30- і 72-контактних модулів SIMM, 168-контактних модулів DIMM і 184-контактних модулів RIMM.
Мікросхеми динамічної пам'яті (DRAM), встановлені в модулях різних типів (SIMM, DIMM або RIMM), можуть мати різну швидкодію. Для модулів SIMM ця величина змінюється від 50 до 120 не. Існують різні версії модулів DIMM з частотами РС66, РС100 і РС133 (відповідно 66, 100 і 133 Мгц). Модулі пам'яті DDR DIMM мають частоту PC 1600 і РС2100 (1600 і 2100 Мбайт/с відповідно).
Якщо в систему вимагається встановити пам'ять з певною частотою, то завжди можна скористатися модулем, частота якого вище необхідної величини. Слід помітити, що яких-небудь проблем при використовуванні модулів пам'яті з різною частотою звичайно не виникає. Різниця в їх вартості достатньо невелика, тому я звичайно купую модулі пам'яті, частота яких вища, ніж це необхідно для виконання певних додатків. Це дозволяє використовувати їх при наступній модернізації системи.
Мал. 6.5. Звичний 30-контактний (9-розрядний) модуль SIMM
Мал. 6.6. Звичний 72-контактний (36-розрядний) модуль SIMM
80

Мал. 6.7. Звичний 168-контактний (72-розрядний) модуль DIMM
Банк (bank) — це якнайменший об'єм пам'яті, необхідний для формування одинарного рядка пам'яті, що адресується процесором. Це мінімальна кількість прочитуваної або записуваної процесором фізичної пам'яті, яка звичайно відповідає ширині шини даних процесора. Якщо процесор має 64-розрядну шину даних, то ширина банку пам'яті також досягає 64 розрядів (біт). При використанні двохканальної або чергується пам'яті формується віртуальний банк, ширина якого удвічі більше абсолютної ширини шини даних процесора.
Не завжди буває так, що модуль пам'яті великої ємкості після установки в комп'ютер працює нормально. Модулі великої ємкості можна використовувати тільки в тому випадку, якщо їх підтримує системна плата. Допустиму місткість і необхідну швидкодію модулів SIMM можна з'ясувати в документації до комп'ютера.
Апаратна і програмна частини BIOSBIOS є інтерфейсом між апаратним забезпеченням і операційною системою. BIOS не схожа на
стандартне програмне забезпечення, оскільки знаходиться в мікросхемах, встановлених на системній платі або платі адаптерів.
BIOS в PC-сумісній системі або знаходиться в мікросхемі системної плати або в мікросхемі плати адаптерів, наприклад у відеоадаптері, або завантажується з диска (драйвери).
Системна BIOS містить драйвери основних компонентів (клавіатури, дисковода, жорсткого диска, послідовного і паралельних портів і т.д.), необхідні для початкового запуску комп'ютера. У міру появи нових пристроїв (відеоадаптерів, накопичувачів CD-ROM, жорстких дисків з інтерфейсом SCSI і т.д.) їх процедури ініціалізації не додавалися в системну BIOS. Гостра необхідність в таких пристроях при запуску комп'ютера відсутня, тому потрібні драйвери завантажуються з диска під час запуску операційної системи. Це відноситься до звукових адаптерів, сканерів, принтерів, пристроїв PC Card (PCMCIA) і т.д.
В той же час існує цілий ряд драйверів, які повинні бути активізовані під час початкового завантаження. Наприклад, чи можна завантажитися з жорсткого диска, якщо драйвери, потрібні для виконання цієї операції, повинні бути завантажені безпосередньо з цього диска? Очевидно, що необхідні драйвери повинні бути заздалегідь завантажені в ПЗП (read-only memory — ROM) системної плати або плати адаптера.
Проте деякі пристрої необхідні при запуску комп'ютера. Наприклад, для відображення інформації на екрані монітора вимагається активізувати відеоадаптер, але його підтримка не вбудована в системну BIOS. Крім того, існує величезна кількість відеоадаптерів, і помістити всі їх драйвери в системну BIOS неможливо. У таких випадках необхідні драйвери поміщаються в мікросхему BIOS на платі цього пристрою. А системна BIOS при завантаженні шукає BIOS відеоадаптера і завантажує її до запуску операційної системи.
Таке розташування BIOS запобігає необхідності постійної модернізації системної BIOS при появі нових моделей пристроїв, особливо використовуваних при початковому завантаженні комп'ютера. Власна BIOS, як правило, встановлюється на наступні плати:
• відеоадаптери — завжди мають власну мікросхему BIOS;• SCSI-адаптери — зверніть увагу, що ця BIOS не підтримує всі SCSI-пристрої, тобто з
диска необхідно завантажувати додаткові драйвери для накопичувачів CD-ROM, сканерів, пристроїв Zip і інших з інтерфейсом SCSI;
• мережеві адаптери — для початкової ініціалізації пристрою або нормального функціонування в бездискових робочих станціях або терміналах;
81

• плата оновлення IDE або дисковода — для підтримки функції завантажувального пристрою при запуску системи;
• плата для вирішення проблеми Y2K — в них міститься коректна процедура переходу в нове тисячоліття.
BIOS і CMOS RAMІноді користувачі плутають BIOS і CMOS RAM системи. Причиною плутанини є те, що програма Setup BIOS використовується для установки і зберігання параметрів конфігурації в CMOS RAM. Слід помітити, що це абсолютно різні компоненти.Звичайно BIOS знаходиться в окремій мікросхемі системної плати. Крім того, на системній платі розташована так звана мікросхема RTC/NVRAM, що містить годинник реального часу і незалежну пам'ять. По суті, ця мікросхема є цифровим датчиком часу з декількома додатковими байтами пам'яті.Мікросхема Motorola MC146818, використана вперше як RTC/NVRAM, містила 64 байт пам'яті, з яких 10 байт були виділені для функціонування годинника. Не дивлячись на те, що вона називається незалежною, при вимкненому живленні параметри часу/дати і дані, що знаходяться в пам'яті, будуть знищені. Мікросхема, створена на основі технології Complementary Metal-Oxide Semiconductor (CMOS), має знижене споживання електроенергії, і для неї цілком досить потужності батареї комп'ютера. Саме тому мікросхема носить назву CMOS RAM, хоча з технічної точки зору її слід було б назвати мікросхемою RTC/NVRAM. Сила струму, споживаного переважно мікросхем RTC/NVRAM, не перевищує одного мікроампера (мільйонної частки ампера), тому для їх роботи досить однієї невеликої батареї. Протягом останніх п'яти років для цього використовувалася літієва батарея, при виході з ладу якої вся інформація, що зберігається в мікросхемі, руйнується. У окремих системах використовуються мікросхеми Dallas Semiconductor RTC/NVRAM (наприклад, DS12885 або DS12887), що також містять батарею. При завантаженні програми BIOS Setup і подальшій конфігурації/збереженні параметрів жорсткого диска або інших пристроїв настановчі параметри системи записуються у відповідну область пам'яті RTC/NVRAM (або, кажучи інакше, CMOS RAM). При кожному завантаженні системи для визначення її конфігурації проводиться прочитування параметрів, що зберігаються в мікросхемі CMOS RAM. Не дивлячись на наявність певного зв'язку між базовою системою вводу-виводу (BIOS) і CMOS RAM, це абсолютно різні компоненти.
Системна BIOSУ всіх системних платах є мікросхема, в якій записано програмне забезпечення, що називається
BIOS або ROM BIOS. Ця мікросхема містить стартові програми і драйвери, необхідні для запуску системи і функціонування основного апаратного забезпечення. У ній також міститься процедура POST (самотестування при включенні живлення) і дані системної конфігурації. Всі ці параметри записані в CMOS-пам'ять, яка живиться від батареї, встановленої на системній плати. Цю CMOS-пам'ять часто називають NVRAM (Non-Volatile RAM).
Таким чином, BIOS є комплектом програм, що зберігаються в одній або декількох мікросхемах. Ці програми виконуються при запуску комп'ютера до завантаження операційної системи. BIOS в більшості PC-сумісних комп'ютерів виконує чотири основні функції.
• POST— самотестування при включенні живлення процесора, пам'яті, набору мікросхем системної логіки, відеоадаптера, контроллерів диска, дисковода, клавіатури і інших життєво важливих компонентів системи.
• Програма установки параметрів BIOS (Setup BIOS) — конфігурація параметрів системи. Ця програма запускається при натисненні певної клавіші (або комбінації клавіш) під час виконання процедури POST. У старих комп'ютерах на базі процесорів 286 і 386 для запуску цієї програми необхідна спеціальна дискета.
• Завантажувач операційної системи — підпрограма, що виконує пошук діючого основного завантажувального сектора на дискових пристроях. При виявленні сектора, відповідного певному мінімальному критерію (його сигнатура повинна закінчуватися байтами 55AAh), виконується код початкового завантаження. Ця програма завантажує завантажувальний сектор операційної системи, який, у свою чергу, завантажує файли ядра операційної системи.
• BIOS — набір драйверів, призначених для взаємодії операційної системи і апаратного забезпечення при завантаженні системи. При запуску DOS або Windows в режимі захисту від збоїв використовуються драйвери пристроїв тільки з BIOS.
Мікросхеми ROMROM (Read-Only Memory) — тип пам'яті, яка може постійно (або практично постійно) зберігати
дані. Ці записані дані зберігаються в пам'яті навіть при відключенні живлення. Таким чином, для зберігання стартових процедур (і BIOS) найбільш підходить пам'ять ROM. Аналогічна пам'ять використовується і в інших пристроях з власною BIOS, наприклад у відеоадаптерах.
82

Помітьте, що ROM і оперативна пам'ять — не протилежні поняття. Насправді ROM є частиною оперативної пам'яті системи. Іншими словами, частина адресного простору оперативної пам'яті відводиться для ROM. Це необхідно для зберігання програмного забезпечення, яке дозволяє завантажити операційну систему.
Наприклад, при включенні персонального комп'ютера лічильник команд автоматично приймає значення (адреса) FFFFOh; команди, розміщені за цією адресою, повинні забезпечити завантаження операційної системи. Цим командам відводиться рівно 16 байт від кінця першого мегабайта оперативної пам'яті і від кінця ROM. Якби ці адреси указували на елементи звичної пам'яті, всі дані, що зберігаються в ній, у тому числі і команди, зникли б при виключенні живлення, і процесор при наступному включенні не знайшов би там ніяких команд. Але, якщо ця адреса указує на осередок ROM, програма запуску системи в незмінному вигляді виконується кожного разу при включенні комп'ютера.
Звичайно першою адресою ROM системи є F0000h, розташована за 64 або 128 Кбайт від кінця першого мегабайта. Оскільки ємність ROM звичайно рівна 128 Кбайт, програми ROM повністю займають останні 128 Кбайт першого мегабайта, включаючи критичну адресу FFFFOh першої команди запуску. Ємність сучасних мікросхем ROM може досягати 256 або 512 Кбайт. Такий збільшений об'єм дозволяє розташовувати драйвери інтегрованих на системній плати пристроїв.
Здається дивним, що персональний комп'ютер при запуску починає виконувати команду, розташовану за 16 байт від кінця ROM, але це зроблено навмисне. Просто за цією адресою поміщається команда переходу JMP, згідно якої процесор переходить до фактичного початку програми; в більшості випадків вона близька до адреси F0000h, яка розташована приблизно на 64 Кбайт раніше в карті пам'яті. Це все одно, що починати читання книгу з 16-ї сторінки від кінця; причому на ній повинен бути вказаний номер сторінки, з якою фактично починається виклад. Зате подібна угода дозволяє вільно змінювати об'єм ROM.
Основний код BIOS міститься в мікросхемі ROM на системній плати, але на платах адаптерів також є аналогічні мікросхеми. Вони містять допоміжні підпрограми базової системи вводу-виводу і драйвери, необхідні для конкретної плати, особливо для тієї плати, яка повинна бути активізована на ранньому етапі початкового завантаження, наприклад відеоадаптер. Плата, не потребуюча драйверів на ранньому етапі початкового завантаження, звичайно не має ROM, тому що їх драйвери можуть бути завантажені з жорсткого диска пізніше — в процесі початкового завантаження. У старих персональних комп'ютерах для BIOS на системній плати відводилося до шести мікросхем, але тепер BIOS звичайно розміщується на одній мікросхемі.
На платах адаптерів, для яких при запуску потрібні драйвери, також розміщені мікросхеми ROM. Це відеоадаптери, більшість плати SCSI (Small Computer Systems Interface), плата контроллерів Enhanced IDE і деякі мережеві плати. Мікросхема ROM на цій платі містить драйвери і програми запуску, які будуть виконані при початковому завантаженні. Наприклад, відеоадаптер може ініціалізуватися, не дивлячись на те що ROM на системній плати не містить драйверів для цього пристрою. Не можна завантажувати початкові драйвери режиму VGA з диска, тому що екран залишатиметься темним (і ви не зможете управляти процесом завантаження), поки не завантажаться ці драйвери. Що ж відбувається при завантаженні? Програма, що зберігається в ROM системної плати, сканує спеціальну область адаптера ROM оперативної пам'яті (адреси C0000-DFFFFh) у пошуках пари байт сигнатури (55AAh), яка указує на початок ROM. Базова система вводу-виводу системної плати автоматично виконує програми в ROM будь-якого адаптера, який вона знаходить в процесі сканування. Процес виявлення і ініціалізації відеоадаптера можна спостерігати в більшості комп'ютерів при включенні живлення і під час виконання POST.
Затінювання ROMМікросхеми ROM дуже "повільні": час доступу рівний 150 нс при часі доступу запам’ятовуючого
пристрою DRAM 60 нс або менше. Тому в багатьох системах ROM затінюється, тобто її вміст копіюється в мікросхеми динамічної оперативної пам'яті при запуску, щоб скоротити час доступу в процесі функціонування. Процедура затінювання копіює вміст ROM в оперативну пам'ять, привласнюючи їй адреси, що спочатку використалися для ROM, яка потім фактично відключається. Це підвищує швидкодію системи пам'яті. Втім, в більшості випадків достатньо затінити тільки базову систему вводу-виводу на системній платі і, можливо, на відеоплаті.
83

Затінювання ефективне головним чином в 16-розрядних операційних системах типа DOS або Windows 3.x. Якщо комп'ютер працює під управлінням 32-розрядної операційної системи типа Windows 9x або Windows NT/2000, то затінювання фактично даремне, тому що ці операційні системи не використовують 16-розрядний код з ROM. Замість нього вони завантажують 32-розрядні драйвери в оперативну пам'ять, замінюючи ними 16-розрядний код базової системи вводу-виводу, який, таким чином, використовується тільки протягом запуску системи. Засіб управління затінюванням знаходиться в програмі Setup BIOS.
Існує чотири різні типи мікросхем пам'яті ROM.• ROM (Read Only Memory).• PROM (Programmable ROM) — програмована ROM.• EPROM (Erasable PROM) — стираєма програмована ROM.• EEPROM (Electrically Erasable PROM) — електронно-стираєма програмована ROM, також
звана Flash ROM.Незалежно від типа ROM, дані в ній зберігаються до тих пір, поки не будуть стерті навмисно.У табл. 5.1 приведені ідентифікаційні номери, звичайно використовувані для маркіровки мікросхем
пам'яті ROM кожного типу.Таблиця 5.1. Ідентифікаційні номери мікросхем пам'яті ROMТип Ідентифікаційний номер Інші ознаки ROM Більше не використовується PROM 27nnnn EPROM 27nnnn Кварцове віконце EEPROM 28хххх або 29хххх
Пропалювана при виготовленні пам'ять ROMСпочатку в більшості мікросхем ROM вже на етапі виготовлення були пропалені "О" і "1", тобто
таку пам'ять ROM можна представити у вигляді матриці, в якій вже при виготовленні в потрібних місцях записуються нулі і одиниці. Матриця є кремнієвим кристалом (мікросхема). Такі мікросхеми називаються пропалюваними при виготовленні, тому що дані записуються в маску, з якою способом фотолітографії виготовляється матриця. Подібний виробничий процес економічно виправдовує себе при виготовленні сотень тисяч мікросхем з однаковою інформацією. Якщо необхідно змінити хоча б один-єдиний біт, доведеться переробити маску, а це обійдеться недешево. Тому такий тип пам'яті ROM не використовується.
Пам'ять PROMУ пам'ять PROM після виготовлення можна записати будь-які дані. Вона була розроблена в кінці
70-х років компанією Texas Instruments і мала ємність від 1 Кбайт (8 Кбіт) до 2 Мбайт (16 Мбіт) або більше. Ці мікросхеми можуть бути ідентифіковані по номерах виду 27nnnn в маркіровці, де 27 указує PROM типа TI, а nnnn — ємність кристала (мікросхеми) в кілобітах. Наприклад, в більшості персональних комп'ютерів з PROM використовувалися мікросхеми 27512 або 271000, які мали ємність 512 Кбіт (64 Кбайт) або 1 Мбіт (128 Кбайт).
Мається на увазі, що ці мікросхеми після виготовлення не містять ніякої інформації, насправді при виготовленні вони прописуються двійковими одиницями. Іншими словами, мікросхема PROM ємністю 1 Мбіт містить 1 млн. одиниць (фактично 1 048 576). При програмуванні такої "порожньої" PROM в неї записуються нулі. Цей процес звичайно виконується за допомогою спеціального програмуючого пристрою.
Процес програмування часто називається пропалюванням. Кожну "1" можна представити як непошкоджений плавкий запобіжник. Більшість таких мікросхем працює при напрузі 5 В, але при програмуванні PROM подається вища напруга (звично 12 В) за різними адресами в межах адресного простору, відведеного для мікросхеми. Ця вища напруга фактично записує "0", спалюючи плавкі запобіжники в тих місцях, де необхідно перетворити 1 в 0. Хоча можна перетворити 1 в 0, цей процес незворотній, тобто не можна перетворити 0 в 1. Програмуючий пристрій досліджує програму, яку необхідно записати в мікросхему, і потім вибірково змінює в мікросхемі 1 на 0 тільки там, де це необхідно. Тому мікросхеми PROM часто називаються мікросхемами ОТР (One Time Programmable — програмовані один раз). Вони можуть бути запрограмовані тільки один раз. Більшість мікросхем PROM вартує зовсім недорого, приблизно 3 долари. Тому при заміні програми в PROM стара мікросхема викидається, а нова пропалюється відповідно до нових даних.
84

Процес програмування PROM займає від декількох секунд до декількох хвилин, залежно від місткості мікросхеми і вживаного алгоритму.
Необхідно відзначити, що для зміни BIOS в сучасних комп'ютерах подібні пристрої не застосовуються. У них використовуються мікросхеми Flash ROM.
Пам'ять EPROMЦе різновид пам'яті PROM, який у свій час був вельми популярний. Дані в пам'яті EPROM
можна стирати. Мікросхему EPROM чітко видно через кварцове віконце, розташоване прямо над кристалом. Фактично крізь вікно ви можете бачити кристал! Мікросхеми EPROM мають той же номер 27nnnn, що і стандартні PROM, причому вони функціонально і фізично ідентичні, якби не прозоре кварцове вікно над матрицею.
Вікно пропускає ультрафіолетове проміння. Інтенсивне ультрафіолетове опромінювання стирає інформацію на матриці (мікросхемі) EPROM. Вікно зроблене з кристала кварцу, тому що звичне скло не пропускає ультрафіолетового проміння. Кварцове вікно підвищує вартість мікросхеми EPROM. Таке підвищення буде невиправданим, якщо інформацію не потрібно стирати.
Ультрафіолетове проміння стирає інформацію на мікросхемі, викликаючи хімічну реакцію, яка як би відновлює (спаює) плавкі запобіжники. Так, будь-який двійковий 0 в мікросхемі стає двійковою 1. Для цього вимагається, щоб довжина хвилі ультрафіолетового проміння була рівна приблизно 2,537 ангстрема, а їх інтенсивність — досить високо. (12 000 мВт/см2). Джерело повинне розташовуватися в безпосередній близькості — не далі 2-3 см (приблизно 1 дюйм), а час експозиції складати від 5 до 15 хв. Пристрій стирання EPROM містить джерело ультрафіолетового проміння (звично це ультрафіолетова лампа розжарювання), розташова над висувною скринькою, в якому розміщуються стирані мікросхеми.
Кварцове вікно на мікросхемі EPROM звичайно заклеюється липкою стрічкою, щоб попередити випадкове проникнення ультрафіолетового проміння. Вони входять до складу сонячного світла і, звичайно, присутні навіть в звичному кімнатному освітленні.
Пам'ять EEPROM, або Flash ROMЦе новіший тип пам'яті ROM — електронно-стираєма програмована постійна пам'ять. Дані
мікросхеми також називаються Flash ROM, і їх можна перепрограмувати, не знімаючи з плати, на яку вони встановлені, без спеціального устаткування. Використовуючи Flash ROM, можна стирати і перепрограмувати ROM безпосередньо на системній платі, не видаляючи мікросхему з системи і навіть не відкриваючи системного блоку! Для того, хто перепрограмовує не потрібен пристрій стирання ультрафіолетовим опромінюванням або який-небудь інший програмуючий пристрій.
Flash ROM можна взнати по номеру 28хххх або 29хххх і відсутності вікна в мікросхемі. За наявності Flash ROM на системній платі можна легко модернізувати ROM, не міняючи мікросхеми. В більшості випадків достатньо завантажити модифіковану програму, одержану з Web-серверу виробника системної плати, а потім запустити програму модифікації.
Рекомендується періодично відвідувати Web-сервер виробника системної плати, щоб стежити за модифікаціями базової системи вводу-виводу для вашого комп'ютера. Модифікована базова система вводу-виводу може містити помилки або забезпечувати підтримку нових пристроїв, яких первинно не було у вашій системі. Наприклад, іноді необхідно модифікувати базову систему вводу-виводу, щоб підтримати завантаження з дисковода LS-120 (дискета ємністю 120 Мбайт).
Виробники ROM BIOSПрактично всі сучасні виробники BIOS надають її код виробникам системної плати і готових
комп'ютерів. Далі мова піде про існуючі версії BIOS.На розробці PC-сумісних програм ROM BIOS спеціалізуються такі компанії, як American
Megatrends, Inc. (AMI), Award Software і Phoenix Software. Виготівники системної плати одержують від них ліцензії на установку ROM BIOS, після чого можуть працювати над апаратною частиною, не займаючись програмним забезпеченням. Для того, щоб встановити на плату мікросхему пам'яті ROM із записаною програмою BIOS, розробнику доводиться вирішувати безліч задач, пов'язаних з пристроєм комп'ютера. Добитися сумісності ROM BIOS і системної плати — задача непроста. Універсальних мікросхем ROM BIOS не існує. AMI, Award, Microid Research і Phoenix поставляють різним виготівникам варіанти BIOS, виконані для конкретних комп'ютерів.
85

Зовсім недавно відбулися великі зміни в компаніях, розробляючих базові системи вводу-виводу. Так, в 1995 році Phoenix підписала контракт з Intel і забезпечувала всю системну плату Intel базовими системами вводу-виводу до 1999 року (тепер такий контракт підписаний з AMI). Для AMI це чудова сделка— як відомо, Intel продає приблизно 80 % (або більше) всієї системної плати.
У середині 1998 року Phoenix перекупила компанію Award, і тепер розроблені нею нові програми продаватимуться під егідою Phoenix. Таким чином, залишилося дві найкрупніші компанії — Phoenix і AMI. Більшість неамериканських виготівників системної плати все ще використовує базову систему вводу-виводу AMI, проте провідною компанією у області розробки BIOS є Phoenix. Нею не тільки розробляються нові базові системи вводу-виводу для комп'ютерів останніх поколінь, але і упроваджуються нові стандарти.
BIOS OEM-виробниківБагато OEM-виробників (Original Equipment Manufacturers) створюють власні мікросхеми пам'яті
ROM. Наприклад, Compaq і AT&T розробили свої варіанти BIOS, сумісні з BIOS компаній AMI, Phoenix і Award, і періодично випускають модернізовані версії BIOS, в яких усунені недоліки попередніх версій і додані нові можливості. Перш ніж встановити на комп'ютері нестандартну мікросхему ROM BIOS, переконайтеся, що вона виготовлена солідною фірмою, яка займається удосконаленням версій своїх програм (важлива не сама мікросхема, а те, що в ній записано).
Деякі OEM-виробники не займаються розробкою BIOS, а замовляють її в незалежних компаніях. Наприклад, для комп'ютерів Hewlett-Packard необхідна спеціальна, унікальна базова система вводу-виводу. Але Hewlett-Packard не займається розробкою подібного роду систем; вона уклала контракт з Phoenix — відомим розробником базових систем вводу-виводу. Таким чином, в комп'ютері Vectra PC компанії Hewlett-Packard використовується BIOS компанії Phoenix. Зверніть увагу: не дивлячись на те що базову систему вводу-виводу розробила Phoenix, будь-які її оновлення можна одержати тільки у Hewlett-Packard.BIOS компанії AMI
Не дивлячись на те що AMI адаптує програми BIOS для конкретних комп'ютерів, вона не продає компаніям-виробникам початковий код BIOS: виробник може замовити нову версію при її випуску. Оскільки багато компаній не можуть (або не хочуть) замовляти кожен змінений варіант, вони пропускають декілька версій, перш ніж закупити нову.Новіші версії AMI BIOS називаються Hi-Rex (High flexibility). AMI Hi-Rex BIOS використовується в системній платі багатьох виробників. AMI— єдиний виробник BIOS, що випускає також свою системну плату.
Будь-яка версія AMI BIOS після включення комп'ютера під час самотестування виводить перший ідентифікаційний рядок повідомлень в нижньому лівому кутку екрану, відразу під інформацією про авторські права.
Базова система вводу-виводу AMI продається через мережу дистриб'юторів, список яких можна знайти на Web-вузлі за адресою: http: //www.ami.com. Проте майте на увазі, що ви не зможете придбати оновлення безпосередньо в AMI.BIOS компанії Award
Award — унікальний виробник BIOS. Вона продає виробникам коди своїх BIOS і дозволяє змінювати їх для адаптації до конкретних систем. (У такому разі це вже не Award BIOS, а її адаптований варіант.) Наприклад, AST і багато інших виробників закупляють готові початкові програми BIOS, а не розробляють їх, починаючи з нуля. Звичайно, AMI і Phoenix також адаптують коди своїх BIOS під комп'ютери конкретних виробників, але вони не продають їм початкових програм. Деякі розробники нібито власних BIOS насправді починали з програм, придбаних в Award або інших компаніях.
Можливості BIOS компанії Award досить широкі. Вона містить програму настройки, яка викликається натисненням комбінації клавіш <Ctrl+Alt+Esc>. Програма настройки дозволяє задати тип жорсткого диска, що необхідне для повної реалізації можливостей накопичувачів IDE і ESDI. Тест POST досить хороший. Технічна підтримка Award доступна за адресою: http://vww.award.com.
У середині 1998 року Award була придбана компанією Phoenix, і тепер базові системи вводу-виводу під ім'ям Award не виробляються. Проте нові версії продовжують підтримувати попередні
86
версії базової системи вводу-виводу. В цілому BIOS компанії Award характеризується прекрасною якістю, хорошою сумісністю і високим рівнем технічної підтримки.BIOS компанії Phoenix
Протягом багатьох років ця програма була еталоном сумісності, з яким порівнювалася продукція інших компаній. Phoenix одна з перших легально переробила IBM BIOS по методу "чистої ділянки пам'яті", або "чорного ящика". Група інженерів вивчила IBM BIOS і склала список можливостей даної програми і вимог, яким вона повинна задовольняти. Ця інформація була передана групі інженерів, які не були знайомі з IBM BIOS. Таким чином, вони могли легально розробляти нову BIOS. Система, що вийшла, була оригінальною і не була копією IBM BIOS, проте функціонувала аналогічно. Довгий час цю систему "доводили до пуття", і тепер її використання викликає набагато менше проблем, пов'язаних з сумісністю, ніж застосування систем інших розробників BIOS.
Phoenix BIOS має дві істотні переваги перед рештою програм. Перше — висока якість виконання процедури POST. Програма відрізняється продуманою системою звукових кодів, які дозволяють на слух діагностувати серйозні несправності системної плати, перешкоджаючі нормальній роботі комп'ютера. Ви можете, наприклад, по звуку виявити несправну мікросхему в нульовому банку пам'яті.
Друге — це документація. Крім докладних описів, прикладених до комп'ютера, Phoenix опублікувала серію технічних довідників, які є основою промислових стандартів BIOS. У довідниках Phoenix міститься вичерпна інформація про Phoenix BIOS, а також про BIOS всіх PC-сумісних комп'ютерів.
Phoenix надає технічну підтримку і документацію за адресою: http://www.phoenix.com; такі ж допомоги надає їх найбільший дистриб'ютор — Micro Firmware, Inc. (http://www.firmware.com). Micro Firmware пропонує оновлення застарілих базових систем вводу-виводу Phoenix, зокрема для комп'ютерів компаній Packard Bell, Gateway 2000 (з системною платою Micronics), Micron Technologies і ін.
Параметри системи, що зберігаються в ROM BIOSЗапуск програми Setup BIOS
Для запуску цієї програми необхідно під час завантаження системи натиснути певну клавішу або комбінацію клавіш. Нижче представлені клавіші запуску цієї програми для BIOS різних виробників, які необхідно натискати під час виконання процедури POST.
• AMI BIOS — <Delete>.• Phoenix BIOS — <F2>.• Award BIOS — <Delete> або комбінація клавіш <Ctrl+Alt+Esc>.• Microid Research BIOS — <Esc>.Якщо жодна з цих клавіш не забезпечує запуску програми Setup BIOS, подивіться документацію до
вашої системної плати або зверніться до її виробника.У деяких системах для запуску програми Setup BIOS використовуються перераховані нижче
клавіші.• IBM Aptiva/Valuepoint — <F1> (під час виконання процедури POST).• Старі версії Phoenix BIOS — <Ctrl+Alt+Esc> або <Ctrl+Alt+S> (у режимі командної стрічк).• Compaq — <F10> (під час виконання процедури POST).Після запуску програми з'явиться її основний екран з меню і підменю. Далі розглядаються команди
цих меню і підменю Setup BIOS для системної плати Intel SE440BX-2. Зверніть увагу, що аналогічні команди використовуються у відповідних програмах інших виробників.
Основне меню програми Setup BIOSУ більшості сучасних програм Setup BIOS основне меню складається з параметрів, приведених в
табл. 5.8.Таблиця 5.8. Параметри основного меню програми Setup BIOSПараметр
Опис Maintenance (Підтримка) Визначення робочої частоти процесора і видалення паролів. Це меню доступне тільки в режимі
Configure, встановлюваному за допомогою перемички на системній плати Main (Основні Розподіл ресурсів апаратного забезпечення
87
параметри) Advanced (Додаткові параметри)
Установка додаткових властивостей (залежить від використовуваного набору мікросхем)
Security (Безпека) Установка паролів і активізація інших засобів безпеки Power (Живлення) Установка параметрів управління живленнямBoot (Завантаження) Визначення параметрів завантаження і блоку живлення Exit (Вихід) Збереження або відміна установлених параметрів
Параметри меню MaintenanceПараметри цього меню призначені для установки робочої частоти процесора і видалення паролів. У
всій старій системній плати робочі параметри процесора встановлюються за допомогою перемичок на системній плати. У більшості нової системної плати ці параметри встановлюються за допомогою програми Setup BIOS. У системній плати Intel SE440BX-2 параметри процесора можна встановлювати як за допомогою перемичок, так і програмно (тільки в режимі Configure). Перемикання в цей режим здійснюється за допомогою перемички на системній плати. Підменю Extended Configuration
Підменю Extended Configuration для системної плати Intel включає параметри установки параметрів пам'яті, які детально описуються в розділі "Додаткові параметри меню Advanced" далі на чолі.
Параметри меню MainЩе перші версії програми Setup BIOS містили це меню. Тут встановлюються системні дата і час,
параметри жорсткого диска і дисководів, а також основні параметри відео. У сучасних програмах Setup BIOS в цьому меню відображається додаткова інформація, наприклад номер версії BIOS, тип і робоча частота процесора, кількість встановленої пам'яті і параметри кодів корекції помилок (Error Correcting Code — ЕСС).
У базовій системі вводу-виводу раніших версій загальний об'єм встановленої пам'яті складався з двох частин — основної і додаткової пам'яті. Основна пам'ять, іноді звана звичною (conventional), була першими 640 Кбайт ОЗП. Весь об'єм пам'яті, що починався з 1024 Кбайт, називався додатковою пам'яттю.
У деяких програмах Setup BIOS відображається об'єм основної і додаткової пам'яті, а також загальний об'єм встановленої пам'яті. Зверніть увагу, що ці параметри змінити не можна — вони носять чисто інформативний характер.
Параметри меню AdvancedУ цьому меню можна встановити параметри, визначувані набором мікросхем системної логіки. Вибір значення параметра Plug and Play O/S особливо важливий при використовуванні
операційної системи, яка не задовольняє специфікації Plug and Play, наприклад Windows NT. В цьому випадку залиште значення за умовчанням (No), і BIOS автоматично конфігурує пристрої.
Якщо ж використовується операційна система, що задовольняє специфікації Plug and Play, наприклад Windows 9x або Windows 2000, а значення описаного параметра встановлене за умовчанням (No), то операційна система самостійно конфігурує всі пристрої і запише всі необхідні дані в BIOS. Для прискорення часу завантаження при використанні операційної системи, що задовольняє специфікації Plug and Play, встановіть значення Yes. Таким чином, буде пропущений етап конфігурації BIOS.
Параметр Reset Configuration Data корисний при установці нового пристрою або зміні конфігурації вже встановленого (наприклад, адаптер був встановлений в інший роз'єм системної плати). У такому разі для усунення невідповідності збережених параметрів реальним встановіть значення Yes параметра Reset Configuration Data і перезавантажите комп'ютер. Після цього всі необхідні зміни будуть збережені в CMOS-пам'яті. Не забудьте при наступному перезавантаженні повернути значення за умовчанням описаного параметра.Параметри підменю PCI Configuration
Підменю PCI Configuration використовується для вибору пріоритету переривань (IRQ) плати розширення, що підключаються в роз'єми PCI. При виборі значення Auto (the default) базова система вводу-виводу і операційна система самостійно призначають переривання IRQ для кожного роз'єму, за винятком спеціальної плати PCI, що використовує унікальні значення переривань. Параметри
88
Додаткові параметри меню AdvancedУ всіх системніх платах кількість цих параметрів визначається можливостями набору мікросхем.
Якщо ви точно не знаєте, який набір мікросхем і тип пам'яті використовується у вашій системній плати, встановлюйте значення Auto. Рекомендовано з'ясувати тип всіх використовуваних у вашій системі компонентів, і тоді можна тонше її конфігурувати, що, природно, приведе до підвищення продуктивності, хай навіть і до невеликого.Параметри меню Peripheral Configuration
Ці параметри використовуються для конфігурації пристроїв, інтегрованих в системну плату, наприклад послідовних і паралельних портів, інтегрованого звукового адаптера і портів USB.
Якщо жоден з послідовних або паралельних портів не використовується, то його краще відключити, таким чином звільняючи ресурси для інших пристроїв.
Якщо ви використовуєте клавіатуру і мишу USB в операційній системі, яка не підтримує USB-пристроїв (наприклад, DOS), то не забудьте активізувати їх підтримку в BIOS за допомогою установки значення Enabled параметра Legacy USB Support. Цю підтримку можна відключити при використовуванні операційних систем Windows 98 або Windows 2000, оскільки необхідні для нормальної роботи драйвери завантажуються автоматично.
Навіть якщо підтримка клавіатури і миші USB в BIOS відключена, їх можна використовувати для роботи з програмою Setup BIOS. Нижче приведений скорочений алгоритм завантаження системи, в якій встановлені ці пристрої.
1. При включенні комп'ютера підтримка клавіатури і миші USB в BIOS відключена.2. Починає виконуватися процедура POST.3. Підтримка клавіатури і миші USB тимчасово активізується, і їх можна використовувати для
роботи з програмою Setup BIOS.4. Процедура POST завершує роботу, і підтримка клавіатури і миші USB в BIOS відключається.5. Завантажується операційна система. До завантаження драйверів USB-пристроїв клавіатура
і миша USB не пізнаються системою. І лише завантаження драйверів USB-пристроївприводить їх в робочий стан.
Перед установкою операційної системи не забудьте активізувати підтримку USB-пристроїв в BIOS. Потім встановите операційну систему. Після цього підтримку можна знову відключити. Але я не рекомендую цього робити, оскільки при завантаженні в режимі DOS клавіатура і миша не працюватимуть. Зверніть увагу, що не рекомендується використовувати одночасно клавіатуру USB і мишу PS/2 (або навпаки). Також пам'ятаєте, що в BIOS підтримуються тільки клавіатура і миша USB. Для інших USB-пристроїв необхідно завантажувати відповідні драйвери.Параметри меню IDE Configuration
За допомогою цих параметрів (табл. 5.16) можна конфігурувати IDE-пристрої, наприклад жорсткі диски, накопичувачі CD-ROM і LS-120 (SuperDisk), накопичувачі на магнітній стрічці і т.д.
Деякі жорсткі диски у момент включення живлення комп'ютера не готові до роботи, тому їм необхідна невелика затримка для повного розкручування двигуна. Завантаження системи буде відкладене на величину цієї затримки.Параметри підменю IDE Configuration
У цьому підменю виконується конфігурація кожного встановленого IDE-пристрою.Найважливішими в програмі Setup BIOS є параметри жорсткого диска. У більшості сучасної
системної плати встановлені два контроллери IDE, які підтримують до чотирьох пристроїв. У сучасних BIOS є можливість автовизначення пристрою і його автоматичної конфігурації. Наявність такої можливості дозволяє уникнути помилок при ручному введенні параметрів пристрою. При автовизначенні пристрою BIOS посилає йому команду Identify Drive. Пристрій у відповідь на цю команду повідомляє інформацію про свої параметри. Таким чином відбувається автоматична конфігурація пристрою. Якщо вибрати значення Auto для жорсткого диска, то його параметри визначатимуться при кожному запуску комп'ютера. У такий спосіб можна без проблем правильно конфігурувати новий IDE-пристрій.
Окрім значення параметра Auto, в багатьох BIOS є таблиця з параметрами приблизно для 47 типів пристроїв. У ній для кожного пристрою визначені кількість циліндрів і головок, передкорекція запису, зона парковки і кількість секторів. Найчастіше в цій таблиці містяться дані про застарілі моделі жорстких дисків.
89

У всіх BIOS можна встановити значення параметра User або User Defined. При цьому можна уручну ввести у відповідні поля параметри пристрою (якщо вони відомі).
Залежно від об'єму жорсткого диска, для нього можна вибрати режим роботи — Standard і LBA. Значення Standard використовується для застарілих моделей жорстких дисків, об'ємом до 528 Мбайт. Це значення параметра в даний час практично не використовується, оскільки сучасні версії BIOS (з 1998 року) підтримують диски об'ємом до 136,9 Гбайт.
В більшості випадків при виборі значення Auto конфігурація жорсткого диска виконується коректно. По можливості завжди встановлюйте це значення, оскільки запит про необхідну для конфігурації інформацію звернений безпосередньо до пристрою. На основі одержаних даних BIOS настроює пристрій на максимальну швидкодію.
Якщо у вас виникне бажання поекспериментувати з параметрами жорсткого диска, вибирайте значення User і вводьте у відповідні поля необхідні значення. Проте пам'ятаєте: при такій "ручній конфігурації" можна ввести невірні параметри; це приведе або до зниження продуктивності, або, у гіршому разі, до того, що система просто не завантажиться.
Параметри меню SecurityУ більшості BIOS можна встановити два типи пароля — Supervisor і User. Пароль Supervisor
управляє доступом до програми Setup BIOS, а User використовується для управління завантаженням комп'ютера.
Якщо встановлений пароль Supervisor, при запуску програми Setup BIOS з'явиться діалогове вікно з пропозицією ввести його. При введенні правильного пароля користувач дістає доступ до параметрів BIOS. Якщо ж пароль був введений невірно, в доступі до параметрів BIOS користувачу буде відмовлено.
Якщо встановлений пароль User, при запуску системи з'явиться діалогове вікно з пропозицією ввести його. При введенні правильного пароля завантаження комп'ютера буде продовжене. Якщо ж встановлені обидва типи паролів, то для продовження завантаження необхідно ввести хоча б один з них. У більшості систем пароль має довжину сім або вісім символів.
Багато системної плати мають перемикач, за допомогою якого, забувши пароль, ви можете видалити всі типи паролів BIOS. Цей перемикач в цілях безпеки ніяк не помічений, а знайти його можна тільки в документації до системної плати. Паролі можна видалити також за допомогою меню Maintenance, але при цьому необхідно знати пароль для доступу до програми Setup BIOS.
В тому випадку, якщо ви знаєте пароль і, отже, можете ввійти в BIOS Setup, для видалення паролів скористайтеся параметром Clear All Passwords; якщо ж він недоступний, видаліть пароль, вибравши функцію Set Password і натиснувши клавішу <Enter> у командному рядку.
Якщо вам не вдається видалити пароль жодним з описаних способів, спробуйте витягнути з системної плати батарею і через 15-20 хвилин встановити її на місце. Всі параметри, у тому числі і паролі, в CMOS-пам'яті будуть стерті.
Параметри меню Power ManagementУправління живленням — це автоматичний переклад комп'ютера на знижене енергоспоживання в
періоди неактивності. В даний час існує дві системи управління живленням: АРМ (Advanced Power Management), яка підтримується практично всіма системами, починаючи з систем на базі процесорів 386 і 486; ACPI (Advanced Configuration and Power Interface), використовувана у всіх нових комп'ютерах з 1998 року. Відмінність між цими системами наступна: у АРМ основна роль управління живленням відводиться апаратному забезпеченню, а в ACPI— програмному забезпеченню і BIOS, що, природно, спрощує настройку цієї системи і роботу з нею.
При переході в режим очікування BIOS припиняє жорсткий диск і знижує (або відключає) енергоспоживання відеосистеми (монітор повинен відповідати специфікації VESA DPMS — Display Power Management Signaling). У цьому режимі система чутлива до зовнішніх дій, тобто вона реагує на натиснення клавіш, переміщення миші, сигнали факс-модему або мережевого адаптера. Поява однієї з описаних подій приведе до негайної активізації монітора.
У більшості комп'ютерів операційна система володіє розширеними засобами управління живленням і бере на себе всі функції, що раніше виконувалися BIOS. Новіша специфікація управління живленням, яка тісно пов'язана як з апаратним, так і з програмним забезпеченням, називається ACPI. Деякі параметри системи управління живленням ACPI встановлюються в BIOS.
90

Параметри меню BootУ цьому меню визначаються параметри процесу завантаження системи. Параметри меню Boot дозволяють визначити, які пристрої і в якій послідовності використовуватимуться для завантаження комп'ютера. Крім того, за допомогою цього меню можна звернутися до параметрів підменю Hard Drive і Removable Devices, завдяки яким можна конфігурувати порядок ініціалізації вказаних пристроїв під час початкового завантаження. Наприклад, призначивши жорсткі диски як перший варіант початкового завантаження, відкрийте підменю жорсткого диска і визначите порядок завантаження системи — спочатку з вторинного дисковода, а потім з первинного. Як правило, порядок завантаження, заданий за умовчанням, кардинально відрізняється від тільки що представленого.Деякі сучасні системи дозволяють завантажитися із зовнішніх дисководів USB, наприклад Zip-
дисководів або LS-120 SuperDisk.Параметри підменю IDE Drive Configuration
За допомогою цього підменю можна вибрати порядок початкового завантаження для дисководів IDE комп'ютера. Параметри BIOS дозволяють встановити в системі більше одного завантажувального жорсткого диска, а також визначити порядок їх завантаження на рівні BIOS, не використовуючи дляцього спеціальну програму диспетчера початкового завантаження. Це меню дуже зручно при роботі з декількома операційними системами.
Plug and Play BIOSУстановка і конфігурація пристроїв в PC-сумісному комп'ютері досить складний процес.
Користувач повинен призначити пристрою переривання, порти вводу-виводу і канали DMA, тобто ресурси, не використовувані в даний момент іншими пристроями. Це виконувалося за допомогою перемичок і перемикачів на плати встановлюваного пристрою. При невірному виборі параметрів виникав конфлікт пристроїв, який найчастіше був причиною інших помилок: наприклад, система відмовлялася завантажуватися.
Технологія Plug and Play значно спростила процес установки і конфігурації нових пристроїв. Користувачу необхідно лише вставити плату у вільний роз'єм, а система автоматично виділить необхідні ресурси.
Технологія Plug and Play складається з наступних основних компонентів:• Plug and Play BIOS;• Extended System Configuration Data (ESCD);• операційна система Plug and Play.При завантаженні комп'ютера Plug and Play BIOS ініціює конфігурацію пристроїв, відповідних
специфікації Plug and Play. Якщо адаптер був вже встановлений в системі, то BIOS прочитує конфігураційну інформацію з ESCD, ініціалізує пристрій і продовжує завантаження. Якщо ж пристрій вперше з'явився в системі, BIOS запрошує у ESCD вільні ресурси. Одержавши їх, вона конфігурує новий пристрій. Якщо ж за допомогою вільних ресурсів не можна конфігурувати новий пристрій, то BIOS продовжує завантаження комп'ютера, а конфігурацією займається операційна система. Параметри всіх коректно конфігурованих пристроїв записуються в базу даних ESCD.
ACPIСтандартний метод взаємодії апаратного забезпечення, операційної системи і додатків для
управління живленням комп'ютера визначається за допомогою ACPI (Advanced Configuration and Power Interface). У попередній системі управління живленням АРМ (Advanced Power Management) основна увага надавалася енергоспоживанню процесора,жорсткого диска і монітора. ACPI контролює не тільки енергоспоживання, але і конфігурацію пристроїв Plug and Play. При використовуванні ACPI конфігурація пристроїв Plug and Play і управління енергоспоживанням здійснюється на рівні операційної системи, а не за допомогою програми установки параметрів BIOS.
Система ACPI підключає і конфігурує пристрої у міру їх використовування. Наприклад, якщо помістити відеокасету у відеомагнітофон і включити комп'ютер, який ним управляє, буде включений не монітор, а телевізор.
Підтримується ACPI операційними системами Windows 98/ME і Windows 2000. В процесі завантаження операційна система виконує ряд тестів апаратного забезпечення для визначення
91
сумісності з ACPI. Якщо якийсь з пристроїв не підтримує ACPI, то для нього використовується система управління живленням АРМ.
Іноді при ініціалізації ACPI може з'явитися повідомлення про помилку на червоному (проблеми з апаратним забезпеченням або BIOS) або синьому (проблеми з програмним забезпеченням) екрані.
Найчастіше ці помилки є слідством часткової або повної несумісності реалізації підтримки ACPI в BIOS або драйвером пристрою. Якщо ви зіткнулися з проблемами ACPI, зверніться до виробника системної плати за оновленнями BIOS.
Класифікація носіїв інформаціїНосій інформації — матеріальний предмет, на якому (або в якому) можливо розмістити інформацію і згодом передати її в оперативну пам'ять комп'ютера.Типи цифрових носіїв інформаціїМагнітні носії:
стримери (магнітна стрічка) флопі-диски вінчестери (HDD) zip-диски D-VHS
Магнітооптичні системи: Магнітооптичний диск (Mini Disk)
Оптичний запис: CD DVD Blue-Ray DVD HD-DVD
Flash-пам'ять: Флеш-пам'ять
Фізичні носії: Перфокарти Перфострічки
Принципи роботи накопичувачів на жорстких дискахУ накопичувачах на жорстких дисках дані записуються і прочитуються універсальними головками
читання/запису з поверхні магнітних дисків, що обертаються, розбитих на доріжки і сектори (512 байт кожен).
Мал. 10.1. Вид накопичувача на жорстких дисках із знятою верхньою кришкою
У накопичувачах звичайно встановлюється декілька дисків, і дані записуються на обох сторонах кожного з них. У більшості накопичувачів є щонайменше два або три диски (що дозволяє виконувати запис на чотирьох або шести сторонах), але існують також пристрої, що містять до 11 і більш дисків. Однотипні (однаково розташовані) доріжки на всіх сторонах дисків об'єднуються в циліндр
92

. Для кожної сторони диска передбачена своя доріжка читання/запису, але при цьому всі головки змонтовані на загальному стержні, або стійці. Тому головки не можуть переміщатися незалежно один від одного і рухаються тільки синхронно.
Жорсткі диски обертаються набагато швидше, ніж гнучкі. Частота їх обертання навіть в більшості перших моделей складала 3 600 об/хв (тобто в 10 разів більше, ніж в накопичувачі на гнучких дисках) і до останнього часу була майже стандартом для жорстких дисків. Але в даний час частота обертання жорстких дисків зросла. Наприклад, в портативному комп'ютері Toshiba диск об'ємом 3,3 Гбайт обертається з частотою 4 852 об/хв, але вже існують моделі з частотами 5 400, 5 600, 6 400, 7 200, 10 000 і навіть 15 000 об/хв. Швидкість роботи того або іншого жорсткого диска залежить від частоти його обертання, швидкості переміщення системи головок і кількості секторів на доріжці.При нормальній роботі жорсткого диска головки читання/записи не торкаються (і не повинні торкатися!) дисків. Але при виключенні живлення і зупинці дисків вони опускаються на поверхню. Під час роботи пристрою між головкою і поверхнею диска, що обертається, утворюється дуже малий повітряний зазор (повітряна подушка). Якщо в цей зазор потрапить порошинка або відбудеться струс, головка "зіткнеться" з диском, що обертається "на повному ходу". Якщо удар буде достатньо сильним, відбудеться поломка головки. Наслідки цього можуть бути різними — від втрати декількох байтів даних до виходу з ладу всього накопичувача. Тому в більшості накопичувачів поверхні магнітних дисків легують і покривають спеціальними мастилами, що дозволяє пристроям витримувати щоденні "зльоти" і "приземлення" головок, а також серйозніші потрясіння.
Мал. 10.2. Доріжки і сектори накопичувача на жорстких дисках
Оскільки пакети магнітних дисків містяться в щільно закритих корпусах і їх ремонт не передбачений, густина доріжок на них дуже висока — до 30 000 і більш на дюйм. Блоки HDA (Head Disk Assembly — блок головок і дисків) збирають в спеціальних цехах, в умовах практично повної стерильності. Обслуговуванням HDA займаються лічені фірми, тому ремонт або заміна яких-небудь деталей усередині герметичного блоку HDA обходиться дуже дорого. Вам доведеться змиритися з думкою, що рано чи пізно накопичувач вийде з ладу, і питання тільки в тому, коли це відбудеться і чи встигнете ви зберегти свої дані.Розкривати накопичувач на жорстких дисках в "домашніх умовах" не рекомендується. Деякі виробники накопичувачів конструктивно виконують їх таким чином, що при розкритті обривається захисна стрічка. Розкривши самостійно накопичувач, ви тим самим розриваєте цю захисну стрічку і позбавляєтеся гарантійних зобов'язань виробника.
Основні вузли накопичувачів на жорстких дискахІснує багато різних типів накопичувачів на жорстких дисках, але практично всі вони складаються з
одних і тих же основних вузлів. Конструкції цих вузлів і якість використовуваних матеріалів можуть бути різними, але основні їх робочі характеристики і принципи функціонування однакові. До основних елементів конструкції типового накопичувача на жорсткому диску відносяться наступні:
• диски;• головки читання/запису;• механізм приводу головок;• двигун приводу дисків;• друкована плата з схемами управління;• кабелі і роз'єми;• елементи конфігурації (перемички і перемикачі).
93

Диски, двигун приводу дисків, головки і механізм приводу головок звичайно розміщуються в герметичному корпусі, який називається HDA (Head Disk Assembly — блок головок і дисків). Звичайно цей блок розглядається як єдиний вузол; його майже ніколи не розкривають. Інші вузли, що не входять в блок HDA (друкована плата, лицьова панель, елементи конфігурації і монтажні деталі) є знімними.
Механізми приводу головокМабуть, ще важливішою деталлю накопичувача, ніж самі головки, є механізм, який встановлює їх в
потрібне положення і називається приводом головок. Саме з його допомогою головки переміщаються від центру до країв диска і встановлюються на заданий циліндр. Існує багато конструкцій механізмів приводу головок, але їх можна розділити на два основні типи:
• з кроковим двигуном;• з рухомою котушкою.Тип приводу багато в чому визначає швидкодію і надійність накопичувача, достовірність
прочитування даних, його температурну стабільність, чутливість до вибору робочого положення і вібрацій. Скажемо відразу, що накопичувачі з приводами на основі крокових двигунів набагато менш надійні, ніж пристрої з приводами від рухомих котушок. Привід — найважливіша деталь накопичувача. У табл. 10.4 приведені два типи приводу головок накопичувача на жорстких дисках і показана залежність характеристик пристрою від конкретного типу приводу.
Отже, у накопичувачів з приводом на основі крокового двигуна середня швидкість доступу до даних достатньо низька (тобто великий час доступу), вони чутливі до коливань температури і вибору робочого положення під час операцій читання і записи, в них не здійснюється автоматична парковка головок (тобто переміщення їх на безпечну "посадочну смугу" при виключенні живлення). Крім того, звично один або двічі в рік їх доводиться переформатувати, щоб привести реальне розташування зон запису у відповідність з розміткою заголовків секторів. Цілком очевидно, що накопичувачі з приводом
94

головок від крокових двигунів в усіх відношеннях поступаються пристроям, в яких використовуються приводи з рухомими котушками.Таблиця 10.4. Залежність характеристик накопичувачів від типу приводуХарактеристика Привід з кроковим двигуном Привід з рухомою котушкою Час доступу до даних Велике Мале Стабільність температури Низька (дуже!) Висока Чутливість до вибору робітника Постійна Відсутній положення Автоматична парковка головок Виконується (не завжди) Виконується Профілактичне обслуговування Періодичне переформатування Не потрібен Загальна надійність (відносна) Низька Висока
У накопичувачах на гнучких дисках для переміщення головок використовується привід з кроковим двигуном. Його параметрів (у тому числі і точність) виявляється цілком достатньо для дисководів цього типу, оскільки густина доріжок запису на гнучких дисках значно нижче (135 доріжок на дюйм), ніж в накопичувачах на жорстких дисках (більше 5 000 доріжок на дюйм). У більшості накопичувачів, що випускаються сьогодні, встановлюються приводи з рухомими котушками.Привід з кроковим двигуном
Кроковий двигун — це електродвигун, ротор якого може повертатися тільки ступінчасто, тобто на строго певний кут. Якщо покрутити його вал уручну, то можна почути неголосні клацання (або тріск при швидкому обертанні), які виникають всякий раз, коли ротор проходить чергове фіксоване положення.
Крокові двигуни можуть встановлюватися тільки у фіксованих положеннях. Розміри цих двигунів невеликі (порядка декількох сантиметрів), а форма може бути різною — прямокутною, циліндровою і т.д. Кроковий двигун встановлюється поза блоком HDA, але його вал проходить всередину через отвір з герметизуючою прокладкою. Звичайно двигун розташовується у одного з кутів корпусу накопичувача і його можна легко взнати.
Одна з найсерйозніших проблем, властивих механізмам з кроковими двигунами, — нестабільність їх температур. При нагріві і охолоджуванні диски розширяються і стискаються, внаслідок чого доріжки зміщуються щодо своїх колишніх положень. Оскільки механізм приводу головок не дозволяє зсунути їх на відстань, меншу одного кроку (перехід на одну доріжку), компенсувати ці погрішності температур неможливо. Головки переміщаються відповідно до поданої на кроковий двигун кількості імпульсів.
На мал. 10.8 показаний зовнішній вигляд приводу з кроковим двигуном.Привід з рухомою котушкою
Привід з рухомою котушкою використовується практично у всіх сучасних накопичувачах. На відміну від систем з кроковими двигунами, в яких переміщення головок здійснюється усліпу, в приводі з рухомою котушкою використовується сигнал зворотного зв'язку, щоб можна було точно визначити положення головок щодо доріжок і скоректувати їх у разі потреби. Така система дозволяє забезпечити вищу швидкодію, точність і надійність, ніж традиційний привід з кроковим двигуном.
Привід з рухомою котушкою працює за принципом електромагнетизму. По конструкції він нагадує звичний гучномовець. Як відомо, в гучномовці рухома котушка, сполучена з дифузором, може переміщатися в зазорі постійного магніта.
95

Мал. 10.8. Зовнішній вигляд приводу з кроковим двигуном
При протіканні через котушку електричного струму вона зміщується разом з дифузором щодо постійного магніта. Якщо струм в котушці періодично змінюється (відповідно до звукового електричного сигналу), то виникаючі при цьому коливання дифузора породжують сприйманий людиною звук. У типовій конструкції приводу рухома котушка жорстко з'єднується з блоком головок і розміщується в полі постійного магніта. Котушка і магніт ніяк не зв'язані між собою; переміщення котушки здійснюється тільки під впливом електромагнітних сил. При появі в котушці електричного струму вона так само, як і в гучномовці, зміщується щодо жорстко закріпленого постійного магніта, пересуваючи при цьому блок головки. Подібний механізм виявляється вельми швидкодійним і не таким галасливим, як привід з кроковим двигуном.
На відміну від приводу з кроковим двигуном, в пристроях з рухомою котушкою немає наперед зафіксованих положень. Натомість в них використовується спеціальна система наведення (позиціонування), яка точно підводить головки до потрібного циліндра (тому привід з рухомою котушкою може плавно переміщати головки в будь-які положення). Ця система називається сервоприводом і відрізняється від раніше розглянутої тим, що для точного наведення (позиціонування) головок використовується сигнал зворотного зв'язку, несучий інформацію про реальне взаємне розташування доріжок і головок. Цю систему часто називають системою із зворотним зв'язком (або з автоматичним регулюванням).
Коливання температур не позначаються на точності роботи приводу з рухомою котушкою і зворотним зв'язком. При стисненні і розширенні дисків всі зміни їх розмірів відстежуються сервоприводом, і положення головок (не будучи приреченими) коректуються належним чином. Для пошуку конкретної доріжки використовується наперед записана на диску допоміжна інформація (сервокод) і в процесі роботи завжди визначається реальне положення циліндра на диску з урахуванням всіх відхилень температур. Оскільки сервокод прочитується безперервно, в процесі нагріву накопичувача і розширення дисків, наприклад, головки відстежують доріжку і проблем з прочитуванням даних не виникає. Тому привід з рухомою котушкою і зворотним зв'язком часто називають системою стеження за доріжками.
Механізми приводу головок з рухомою котушкою бувають двох типів:• лінійний;• поворотний.Ці типи відрізняються тільки фізичним розташуванням магнітів і котушок.Лінійний привід (мал. 10.9) переміщає головки по прямій, строго уздовж лінії радіусу диска.
Котушки розташовуються в зазорах постійних магнітів. Головна гідність лінійного приводу полягає у тому, що при його використовуванні не виникають азимутні погрішності, характерні для поворотного приводу. (Під азимутом розуміється кут між площиною робочого зазора головки і напрямом доріжки запису.) При переміщенні з одного циліндра на іншій головки не повертаються і їх азимут не змінюється.
96
Проте лінійний привід має істотний недолік: його конструкція дуже масивна. Щоб підвищити продуктивність накопичувача, потрібно понизити масу приводного механізму і самих головок. Чим легший механізм, тим з великими прискореннями він може переміщатися з одного циліндра на іншій. Лінійні приводи набагато важчі поворотних, тому в сучасних накопичувачах вони не використовуються.
Поворотний привід (див. мал. 10.7) працює за тим же принципом, що і лінійний, але в ньому до рухомої котушки кріпляться кінці важелів головок. При русі котушки щодо постійного магніта важелі переміщення головок повертаються, пересуваючи головки до осі або до країв дисків. Завдяки невеликій масі така конструкція може рухатися з великими прискореннями, що дозволяє істотно скоротити час доступу до даних. Швидкому переміщенню головок сприяє і той факт, що плечі важелів робляться різними: то, на якому змонтовані головки, має велику довжину.
До недоліків цього приводу слід віднести те, що головки при переміщенні від зовнішніх циліндрів до внутрішніх повертаються і кут між площиною магнітного зазора головки і напрямом доріжки змінюється. Саме тому ширина робочої зони диска (зони, в якій розташовуються доріжки) виявляється часто обмеженою (для того, щоб неминуче виникаючі азимутні погрішності залишалися в допустимих межах).
Мал. 10.9. Лінійний привід з рухомою котушкою
В даний час поворотний привід використовується майже у всіх накопичувачах з рухомою котушкою.
Автоматична парковка головокПри виключенні живлення важелі з головками опускаються на поверхні дисків. Накопичувачі
здатні витримати тисячі "зльотів" і "посадок" головок, але бажано, щоб вони відбувалися на спеціально призначених для цього ділянках поверхні дисків, на яких не записуються дані. При цих зльотах і посадках відбувається знос (абразія) робочого шару, оскільки з-під головок вилітають "клуби пилу", що складаються з частинок робочого шару носія; якщо ж під час зльоту або посадки відбудеться струс накопичувача, то вірогідність пошкодження головок і дисків істотно зросте.
Однією з переваг приводу з рухомою котушкою є автоматична парковка головок. Коли живлення включене, головки позиціонуються і утримуються в робочому положенні за рахунок взаємодії магнітних полів рухомої котушки і постійного магніта. При виключенні живлення поле, що утримує головки над конкретним циліндром, зникає, і вони починають безконтрольно ковзати по поверхнях дисків, що ще не зупинилися, що може стати причиною пошкоджень. Для того, щоб запобігти можливим пошкодженням накопичувача, поворотний блок головок під'єднується до поворотної
97

пружини. Коли комп'ютер включений, магнітна взаємодія звичайно перевершує пружність пружини. Але при відключенні живлення головки під впливом пружини переміщаються в зону парковки до того, як диски зупиняться. У міру зменшення частоти обертання дисків головки з характерним потріскуванням "приземляються" саме в цій зоні.
Так, щоб в накопичувачах з приводом від рухомої котушки привести в дію механізм парковки головок, достатньо просто вимкнути комп'ютер; ніякі спеціальні програми для цього не потрібні. У разі раптового зникнення живлення головки паркуються автоматично.
Повітряні фільтриМайже у всіх накопичувачах на жорстких дисках використовується два повітряні фільтри: фільтр
рециркуляциі і барометричний фільтр. На відміну від змінних фільтрів, які встановлювалися в старих накопичувачах великих машин, вони розташовуються усередині корпусу і не підлягають заміні протягом всього терміну служби накопичувача.
У старих накопичувачах відбувалося постійне перекачування повітря зовні всередину пристрою і навпаки крізь фільтр, який потрібно було періодично міняти. У сучасних пристроях від цієї ідеї відмовилися. Фільтр рециркуляциі в блоці HDA призначений тільки для очищення внутрішньої "атмосфери" від невеликих частинок робочого шару носія, які, не дивлячись на всім заходам, що вживаються, все ж таки обсипаються з дисків при зльотах і посадках головок (а також від будь-яких інших дрібних частинок, які можуть проникнути всередину HDA). Оскільки накопичувачі персональних комп'ютерів герметизуються і в них не відбувається перекачування повітря зовні, вони можуть працювати навіть в умовах сильного забруднення навколишнього повітря (мал. 10.13).
Мал. 10.13. Циркуляція повітря в накопичувачі на жорсткому диску
Вище наголошувалося, що блок HDA герметичний, проте це не зовсім так. Зовнішнє повітря проникає всередину HDA крізь барометричний фільтр, оскільки це необхідне для вирівнювання тиску зсередини і зовні блоку. Саме тому, що жорсткі диски не є повністю герметичними пристроями, компанії-виготівники указують для них діапазон висот над рівнем моря, в якому вони зберігають працездатність (звично від -300 до +3 000 м). Для деяких моделей максимальна висота підйому обмежена 2 000 м, оскільки в більш розрідженому повітрі просвіт між головками і поверхнями носіїв виявляється недостатнім. У міру зміни атмосферного тиску повітря виходить з накопичувача або, навпаки, проникає в нього крізь вентиляційний отвір, щоб вирівняти тиск зовні і усередині пристрою. Проте це не приводить до забруднення "атмосфери" усередині накопичувача. Річ у тому, що барометричний фільтр, встановлений на цьому отворі, здатний затримувати частинки розміром більше 0,3 мкм, що відповідає стандартам чистоти атмосфери усередині блоку HDA. У деяких пристроях використовуються щільніші (тонкі) фільтри, що дозволяють затримувати ще дрібніші частинки. Ви легко знайдете вентиляційні отвори на більшості блоків HDA, тоді як самі барометричні фільтри знаходяться усередині блоку.
Кілька років тому я проводив на гаваях семінар, на якому присутні декілька співробітників астрономічної обсерваторії, розташованої на горі Мауна-Кеа. Вони скаржилися, що у всіх них комп'ютерах жорсткі диски дуже швидко виходять з ладу, а деякі відмовляються працювати із самого початку. У цьому немає нічого дивовижного, оскільки обсерваторія знаходиться на вершині гори,
98
висота якої 4200 м, а в таких умовах навіть люди відчувають, м'яко кажучи, дискомфорт. Тому всім співробітникам обсерваторії було наказано користуватися для зберігання даних тільки дискетами або накопичувачами на магнітній стрічці. Через деякий час компанія Adstar (дочірнє підприємство IBM, що займається виробництвом жорстких дисків) розробила серію повністю герметичних накопичувачів (але, звичайно, з повітрям всередині) формату 3,5 дюйми. Оскільки повітря в цих пристроях знаходиться під тиском, подібні накопичувачі можуть працювати на будь-якій висоті над рівнем моря (наприклад, в літаку) і навіть в екстремальних умовах — витримувати струси, коливання температур і т.д. Такі накопичувачі призначені для військових і промислових цілей.
Плата управлінняУ кожному накопичувачі, у тому числі і на жорстких дисках, є хоча б одна плата. На ній
вмонтовуються електронні схеми для управління двигуном шпінделя і приводом головок, а також для обміну даними з контроллером (представленими в наперед обумовленій формі). У накопичувачах IDE контроллер встановлюється безпосередньо в накопичувачі, а для SCSI необхідно використовувати додаткову платню розширення.
Досить часто несправності виникають не в механічних вузлах накопичувачів, а в платні управління. На перший погляд це твердження може показатися дивним, оскільки загальновідоме, що електронні вузли надійніші механічних, проте факт залишається фактом. Тому багато несправних накопичувачів можна відремонтувати, замінивши лише платню управління, а не весь пристрій. Ця можливість особливо приваблива тому, що ви зможете знов дістати доступ до записаних в накопичувачі даних, чого, природно, не вдасться зробити, якщо його повністю замінити.
Знімати і замінювати платню управління дуже просто, оскільки вони підключаються до накопичувачів за допомогою роз'ємів і кріпляться стандартними гвинтами. Якщо накопичувач вийшов з ладу, а у вас є запасний екземпляр, перевірте працездатність платні управління, замінивши її явно справною. Якщо підозри підтверджуються, замовте нову платню у виготівника. Можете купити відремонтовану платню і навіть продати окремо несправну платню і старий накопичувач. Всі подробиці можна взнати в сервісних центрах відповідних компаній.
Плата управління випускається багатьма компаніями, причому частіше всього вони коштують набагато дешевше, ніж вироби-оригінали, випущені виробниками накопичувачів.
ATA RAIDНадлишковий масив незалежних (або недорогих) дискових накопичувачів (Redundant Array of
Independent/Inexpensive Disks — RAID) розроблявся в цілях підвищення відмовостійкості і ефективності систем комп'ютерних запам'ятовуючих пристроїв. Технологія RAID була розроблена в Каліфорнійському університеті в 1987 році. У її основу був встановлений принцип використання декількох дисків невеликого об'єму, взаємодіючих один з одним за допомогою спеціального програмного і апаратного забезпечення, як один диск великої ємності.
Первинна конструкція RAID передбачала просте з'єднання областей пам'яті декількох окремих дисків. Але, як виявилося, подібна схема приводить до зменшення надійності матриці і практично не впливає на її швидкодію. Наприклад, чотири диски, об'єднані в матрицю, яка працює як один диск, "збоїтимуть" в чотири рази частіше, ніж один диск тієї ж ємності. Для підвищення надійності і швидкодії матриці учені університету Берклі запропонували шість різних рівнів RAID. Кожний з цих рівнів характеризується певною відмовостійкістю (надійністю), ємністю запам’ятовуючого пристрою, і швидкодією.
У липні 1992 року була створена організація RAID Advisory Board (RAB), яка займається стандартизацією, класифікацією і вивченням RAID. Зібрані матеріали знаходяться на Web-вузлі організації http://vww.raid.advisory.com. RAB займається розробкою специфікацій RAID, узгодженням програм для його різних рівнів, а також систематизацією класу програм для апаратного забезпечення RAID.
В даний час організація RAB визначила сім стандартних рівнів RAID, від RAID 0 до RAID 6. Як правило, надлишковий масив незалежних дискових накопичувачів (RAID) може бути реалізований за допомогою плати контроллера RAID. Крім того, для цього може використовуватися відповідне програмне забезпечення (що, правда, не рекомендується). Існує декілька рівнів RAID.
• Рівень RAID 0 — розшарування. Вміст файлу записується одночасно на декілька дисків матриці, яка працює як один дисковод великої ємності. Цей рівень забезпечує високу
99

швидкість виконання операцій читання/запису, але дуже низьку надійність. Для реалізації рівня необхідні, як мінімум, два дисководи.
• Рівень RAID 1 — дзеркальне віддзеркалення. Дані, записані на одному диску, дублюються на іншому, що забезпечує чудову відмовостійкість (при пошкодженні одного диска відбувається прочитування даних з іншого диска). При цьому помітного підвищення ефективності матриці в порівнянні з окремим дисководом не відбувається. Для реалізації рівня необхідні, як мінімум, два дисководи.
• Рівень RAID 2 — розрядний код корекції помилок. Одночасно відбувається побітове дроблення даних і запис коду корекції помилок (ЕСС) на декількох дисках. Цей рівень призначений для запам'ятовуючих пристроїв, що не підтримують ЕСС (всі дисководи SCSI і АТА мають вбудований внутрішній код корекції помилок). Забезпечує високу швидкість передачі даних і достатню надійність матриці. Для реалізації цього рівня потрібно декілька дисководів. Але в даний час не існує комерційних контроллерів RAID 2 або дисководів, що не підтримують код корекції помилок.
• Рівень RAID 3 — розшарування з контролем парності. Об'єднання рівня RAID 0 з додатковим дисководом, використовуваним для обробки інформації контролю парності. Цей рівень фактично є видозміненим рівнем RAID 0, для якого характерне зменшення загальної корисної ємності матриці при збереженні числа дисководів. Проте при цьому досягається високий рівень цілісності даних і відмовостійкості, оскільки у разі пошкодження одного з дисків, дані можуть бути відновлені. Для реалізації цього рівня необхідні, як мінімум, три дисководи (два або більш для даних і один для контролю парності).
• Рівень RAID 4 — зблоковані дані з контролем парності. Цей рівень подібний рівню RAID 3 і відрізняється тільки тим, що запис інформації здійснюється на незалежні дисководи у вигляді великих блоків даних, що приводить до збільшення швидкості читання великих файлів. Для реалізації цього рівня необхідні, як мінімум, три дисководи (два або більш для даних і один для контролю парності).
• Рівень RAID 5 — зблоковані дані з розподіленим контролем парності. Цей рівень подібний RAID 4, але припускає вищу продуктивність, яка досягається за рахунок розподілу системи контролю парності по категоріях жорстких дисків. Для реалізації цього рівня необхідні, як мінімум, три дисководи (два або більш для даних і один для контролю парності).
• Рівень RAID 6 — зблоковані дані з подвійним розподіленим контролем парності. Подібний рівню RAID 5 і відрізняється тим, що дані контролю парності записуються двічі за рахунок використання двох різних схем контролю парності. Це забезпечує вищу надійність матриці у разі множинних відмов дисковода. Для реалізації цього рівня необхідні, як мінімум, чотири дисководи (два або більш для даних і два для контролю парності).
Існують також додаткові рівні RAID, представлені певними компаніями як нестандартні реалізації. Ці рівні офіційно не підтримуються RAID Advisory Board. Зверніть увагу, що вищий номер рівня не означає вищу ефективність або надійність; порядок нумерації рівнів RAID абсолютно довільний.
До недавнього часу практично всі контроллери RAID створювалися на основі дисководів SCSI. З професійної точки зору, SCSI RAID є найприйнятнішим варіантом, оскільки він об'єднує в собі позитивні сторони RAID з достоїнствами SCSI як інтерфейсу, призначеного для підтримки декількох дисководів. В даний час з'явилися контроллери ATA RAID, які дозволяють значно зменшити вартість реалізацій RAID. Як правило, контроллери ATA RAID використовуються в розрахованих на одного користувача системах не стільки для підвищення надійності, скільки для підвищення їх ефективності.
Реалізації АТА RAID багато в чому простіші, ніж професійні адаптери SCSI RAID, використовувані в мережевих файлових серверах. Стандарт АТА RAID призначений в основному для індивідуальних користувачів, прагнучих до підвищення продуктивності системи або простого дзеркального віддзеркалення дисків для резервування даних. Ради підвищення функціональності системи адаптери АТА RAID підтримують рівень RAID 0, який забезпечує розшарування даних. На жаль, це приводить до зниження надійності дискової матриці, оскільки при пошкодженні диска всі дані, що знаходяться на ньому, будуть втрачені. Надійність матриці, що працює на рівні RAID 0, підвищується із збільшенням кількості використовуваних дисководів. Не чекайте, що при використанні чотирьох дисководів ефективність матриці також збільшиться в чотири рази. Вона
100
буде просто близька до постійної швидкості передачі даних. Певні непродуктивні витрати виникають через контроллер, що виконує розшарування даних, а також можуть бути пов'язані з періодом часу очікування (мається на увазі час, використовуваний для пошуку даних). Проте навіть в цьому випадку ефективність матриці буде вищою, ніж якого-небудь окремого дисковода.
Для досягнення вищої надійності адаптери ATA RAID підтримують рівень RAID 1, який є дзеркальним відображенням дисковода. При цьому відбувається дублювання даних, записаних на одному з дисків. При пошкодженні якого-небудь дисковода система може працювати з даним, збереженими на іншому диску. На жаль, ефективність матриці при цьому практично не змінюється; більш того, використовуватиметься тільки половина існуючого об'єму диска. Іншими словами, встановлюються два диски, а по суті виходить тільки один (другий диск є дзеркальним відображенням першого).
Для того, щоб об'єднати високу ефективність з підвищенням надійності матриці, слід скористатися рівнями RAID 3 або RAID 5. Наприклад, практично всі професійні контроллери RAID, використовувані в мережевих файлових серверах, призначені для роботи на рівні RAID 5. При цьому вартість подібних контроллерів значно вища. Крім того, для реалізації рівня RAID 5 необхідні, як мінімум, три дисководи. Більшість контроллерів ATA RAID дозволяє об'єднувати різні рівні RAID, наприклад рівні 0 і 1, що дає можливість підвищити надійність матриці за відсутності додаткових витрат. Для реалізації цих рівнів потрібні чотири дисководи, два з яких утворюють рівень RAID 0. При цьому їх вміст записується в другий масив дисків, створюючих рівень RAID 1. Подібна схема дозволяє приблизно в два рази підвищити ефективність матриці, зберігши при цьому резервний набір даних.
Контроллери IDE RAID в даний час поставляються компаніями Arco Computer Products, Iwill, Promise Technology і ін. Типовим прикладом контроллера ATA RAID є Promise FastTrak 100/TX4. Цей контроллер дає можливість з'єднати до чотирьох дисководів, які, у свою чергу, можуть бути організовані в рівні RAID 0, 1 або режим 0+1. У цій платі також використовуються окремі канали передачі даних (кабелі) АТА для кожного дисковода, чим досягається максимальна ефективність системи. Компанія Promise Technology також пропонує менш дорогий контроллер стандарту АТА RAID, що має тільки два канали даних — FastTrak 100/TX2. Цей контроллер теж дозволяє сполучати до чотирьох дисководів, але при сумісному використовуванні двох кабелів АТА ефективність матриці буде нижчою. Це пов'язано з тим, що дисковод може одноразово передавати дані тільки по одному кабелю, що знижує удвічі продуктивність всієї матриці.
При пошуку потрібного контроллера АТА RAID в першу чергу зверніть увагу на наступні параметри:
• підтримка рівнів RAID (в основному це рівні 0, 1 і поєднання рівнів 0+1);• два або чотири канали;• підтримка швидкостей АТА/100;• підтримка роз'ємів PCI з частотами 33 або 66 Мгц.Надлишковий масив незалежних дискових накопичувачів може бути організований і без
дорогих контроллерів RAID. Для цього слід скористатися засобами операційних систем старших моделей (найчастіше серверних). Наприклад, операційні системи Windows NT/2000 і ХР Server підтримують реалізацію RAID на програмному рівні, використовуючи при цьому як розшарування, так і дзеркальне відображення даних. Для установки параметрів і управління функціями RAID, а також відновлення пошкоджених даних в цих операційних системах використовується програма Disk Administrator. Проте при організації серверу, який повинен поєднувати в собі ефективність і надійність, краще скористатися контроллерами АТА або SCSI RAID, апаратно підтримуючими рівні RAID 3 або 5.
Тема: Оптичні носії інформації.План.
1. Основні параметрів оптичних накопичувачів. 1.1. Параметри швидкодії накопичувачів CD-ROM.1.2. Інтерфейс.1.3. Механізм завантаження диску.1.4. Інші особливості накопичувачів на компакт-дисках.
2. Основні параметри записуючих накопичувачів CD-ROM.
101

2.1. Накопичувачі CD-R.2.2. Накопичувачі CD-RW.
3. Накопичувачі DVD.3.1. Специфікації DVD.3.2. Стандарти DVD.
4. Структурна схема накопичувача CD-ROM.
1. Основні параметрів оптичних накопичувачів. При виборі накопичувача CD-ROM необхідно враховувати такі параметри:• продуктивність;• тип інтерфейсу, що використовується для підключення до комп'ютера;• тип механізму завантаження і витягу компакт-диску.Звичайно фірми-виробники випускають серії моделей накопичувачів CD-ROM з різними
швидкостями зчитування, різними механізмами завантаження диска і типами адаптерів, що забезпечують контакт із комп'ютером. Тому ціни на накопичувачі CD-ROM мають великий діапазон. Щоб правильно вибрати пристрій, необхідно мати повне представлення про його параметри.1.1. Параметри швидкодії накопичувачів CD-ROM.Приводимі в документації до накопичувачів CD-ROM параметри характеризують в основному продуктивність пристрою. Основні характеристики накопичувачів CD-ROM — швидкість передачі і час доступу до даних, наявність внутрішніх буферів і їхня ємність, а також тип використовуваного інтерфейсу.Швидкість передачі данихЦей параметр визначає обсяг даних, що може передати накопичувач з компакт-диску на комп'ютер за одну секунду. Основною одиницею виміру швидкості передачі даних є кількість переданих кілобайтів (у сучасних моделях мегабайтів) даних за секунду (Кбайт/с). Наприклад, якщо зазначено, що швидкість передачі даних дорівнює 150 Кбайт/с, то даний накопичувач буде зчитувати з компакт-диску 150 Кбайт даних за секунду при сталому режимі. Помітимо, що мова йде про безперервне зчитування даних, а не зчитування з різних місць диска. Очевидно, що ця характеристика відбиває максимальну швидкість зчитування накопичувача. Чим вища швидкість зчитування, тим краще, однак необхідно пам'ятати, що існують і інші важливі параметри.У відповідності зі стандартним форматом запису за кожну секунду повинно зчитуватися 75 блоків даних по 2048 корисних байтів. Швидкість передачі даних при цьому повинна бути дорівнювати 150 Кбайт/с. Це стандартна швидкість передачі даних для пристроїв CD-DA, що також називаються одношвидкісними. Цей термін означає, що запис на компакт-диски здійснюється у форматі з постійною лінійною швидкістю (CLV); при цьому швидкість обертання диска змінюється так, щоб лінійна швидкість залишалася постійною.Оскільки дані з диска CD-ROM, на відміну від музичних компакт-дисків, можна зчитувати з довільною швидкістю (головне, щоб лінійна швидкість була постійною), її цілком можна підвищити. На сьогоднішній день випускаються накопичувачі, у яких інформація може зчитуватися з різними швидкостями, кратними швидкості, що прийнята для одношвидкісних накопичувачівЧас доступуЧас доступу до даних для накопичувачів CD-ROM визначається так само, як і для жорстких дисків. Він дорівнює затримці між одержанням команди і моментом зчитування першого біта даних. Час доступу виміряється в мілісекундах. При цьому мається на увазі середній час доступу, оскільки реальний час доступу залежить від розташування даних на диску. Очевидно, що при роботі на внутрішніх доріжках диска час доступу буде меншим, ніж при зчитуванні інформації з зовнішніх доріжок. Тому в паспортах на накопичувачі приводиться середній час доступу, обумовлений як середнє значення при виконанні декількох випадкових зчитувань даних з диска.Зрозуміло, чим менше час доступу, тим краще, особливо в тих випадках, коли дані потрібно знаходити і зчитувати швидко. Час доступу до даних на CD-ROM постійно скорочується. Помітимо, що цей параметр для накопичувачів CD-ROM набагато гірший, ніж для жорстких дисків (100-200 мс для CD-ROM і 8 мс для жорстких дисків). Настільки істотна різниця пояснюється принциповими розходженнями в конструкціях: у жорстких дисках використовується кілька голівок, і діапазон їхнього механічного переміщення менший. Накопичувачі CD-ROM використовують один лазерний промінь, що переміщається уздовж усього диска. До того ж дані на компакт-диску записані уздовж спіралі і після переміщення зчитуавльної головки для читання даної доріжки необхідно ще чекати, коли
102

лазерний промінь потрапить на ділянку з потрібними даними. При читанні зовнішніх доріжок час доступу більший, ніж при читанні внутрішніх доріжок.Час доступу до даних у сучасних накопичувачах CD-ROM істотно знизився в порівнянні з першими одношвидкісними моделями. Звичайно, коли збільшується швидкість передачі даних, відповідно зменшується і час доступу. Кеш-пам'ятьУ багатьох накопичувачах CD-ROM наяявні вбудовані буфери, або кеш-пам'ять. Ці буфери являють собою встановлювані на платі накопичувача мікросхеми пам'яті для запису зчитуємих даних, що дозволяє передавати в комп'ютер за одне звертання великі масиви даних. Як правило ємність буфера складає 256 Кбайт, хоча випускаються моделі як з великими, так і з меншими обсягами (чим більше — тим краще!). Як правило, у більш швидкодіючих пристроях ємність буферів більша. Це робиться для досягнення більш високих швидкостей передачі даних. Наприклад, у накопичувачі Kenwood з технологією True/MultiBeam ємність буфера складає 2 Мбайт. Ця пам'ять служить для збереження даних від семи променів лазера.Накопичувачі, у яких є буфер (кеш-пам'ять), володіють рядом переваг. Завдяки буферу дані в комп'ютер можуть передаватися з постійною швидкістю. Наприклад, дані для зчитування звичайно розкидані по диску, і, оскільки накопичувачі CD-ROM мають відносно великий час доступу, це може привести до затримок надходження в комп'ютер зчитувальних даних. Це практично непомітно при роботі з текстами, але, якщо в накопичувача великий час доступу і немає буфера даних, виникаючі паузи сильно діють на нерви при виводі зображень або звукового супроводу. Крім того, якщо для керування накопичувачами використовуються досить складні програми-драйвери, то в буфер може бути заздалегідь записаний зміст диска і звертання до фрагмента запитуваних даних відбувається набагато швидше, ніж при пошуку "з нуля". Прямий доступ до пам'ятіВ даний час практично у всіх комп'ютерах встановлюється контролер Bus Master IDE. Ці контролери дозволяють поміщати дані безпосередньо в оперативну пам'ять, минаючи процесор. При використанні подібних контролерів завантаження процесора накопичувачем CD-ROM (незалежно від типу інтерфейсу) зменшується до 11%. Якщо у вашій системі є контролер Bus Master IDE, обов'язково установіть для накопичувачів CD-ROM і жорстких дисків прямий доступ до пам'яті.Практично всі сучасні накопичувачі CD-ROM (12x і вище) і системні плати на базі процесорів Pentium підтримують передачу даних безпосередньо в пам'ять. Щоб визначити, є чи у вашій системі підтримка прямого доступу до пам'яті, клацніть на System у вікні Control Panel. В закладці Device Manager клацніть на знаку "+" біля групи пристроїв Hard Disk Controllers. Якщо в списку є пристрій Bus Master..., то у вашій системі підтримується прямий доступ до пам'яті. Для установки прямого доступу до пам'яті недостатньо мати контролер Bus Master IDE, потрібні ще пристрої (жорсткі диски і накопичувачі CD-ROM), що будуть підтримувати цей режим. Визначте тип встановлених у вашій системі накопичувачів і проконсультуйтеся у виробників про підтримувані властивості. Жорсткі диски і накопичувачі CD-ROM, що підтримують режими MultiWord DMA Mode 2 (16,6 Мбайт/с), UltraDMA Mode 2 (33 Мбайт/с) або більш швидкі, можуть використовувати прямий доступ до пам'яті.Для того щоб активізувати прямий доступ до пам'яті жорсткого диска або накопичувача CD-ROM, двічі клацніть на ньому у закладці Устройства діалогового вікна Свойства: Система й у вікні властивостей, що з'явилося, даного пристрою у вкладці Настройка (Settings) установіть прапорець DMA.1.2. Інтерфейс.Під інтерфейсом накопичувача CD-ROM розуміють фізичне з'єднання накопичувача із шиною розширення. Оскільки інтерфейс — це канал, за допомогою якого дані передаються від накопичувача до комп'ютера, його значення надзвичайно велике. Для підключення накопичувача CD-ROM до комп'ютера використовується чотири типи інтерфейсів:
• SCSI/ASPI (Small Computer System Interface/Advanced SCSI Programming Interface);• IDE/ATAPI (Integrated Device Electronics/AT Attachment Packet Interface);• Паралельний порт;• порт USB.
Інтерфейс SCSI/ASPIІнтерфейсом SCSI (Small Computer System Interface — інтерфейс малих комп'ютерних систем) називається спеціалізована шина, до якої можна підключати різні типи периферійних пристроїв.
103

Взаємодія між накопичувачем CD-ROM (і іншими SCSI-пристроями) і основним адаптером здійснюється за допомогою стандартного програмного інтерфейсу за назвою ASPI (Advanced SCSI Programming Interface). SCSI — універсальний і високопродуктивний інтерфейс для накопичувачів CD-ROM, до якого можна підключити й інші периферійні пристрої.При цьому додаткові пристрої, наприклад накопичувачі на магнітній стрічці або додаткові накопичувачі CD-ROM, можна підключати послідовно до того самого основного адаптера, а не встановлювати для кожного з них у роз’єм системної шини комп'ютера окремі плати. Завдяки цій властивості при підключенні до комп'ютера декількох периферійних пристроїв, зокрема накопичувачів CD-ROM, варто віддавати перевагу саме інтерфейсові SCSI.Підводячи підсумок, відзначимо, що при покупці накопичувача CD-ROM з інтерфейсом SCSI необхідно переконатися в наявності ASPI-драйвера для операційної системи і перевірити відповідність програми ASPI-Manager основного адаптера SCSI драйверові накопичувача.SCSI — самий підходящий інтерфейс для накопичувачів CD-ROM і інших пристроїв. Він дозволяє домогтися високої продуктивності, а також підключити до семи (і більше) пристроїв до одного основного адаптера. Недолік цього інтерфейсу — його висока вартість. Якщо ви не збираєтеся підключати до шини SCSI яких-небудь інших периферійних пристроїв, крім накопичувача CD-ROM, то не витрачайте гроші на можливості, що ніколи не будуть затребувані. У цьому випадку краще використовувати інтерфейс IDE/ATAPI.1.3. Механізм завантаження диску.Існує два принципово різних типи завантаження компакт-дисків: у контейнери накопичувача й у висувні лотки. Кожний з них має свої переваги і недоліки. Від того, який тип завантаження ви виберете, залежить спосіб вашого "спілкування" з накопичувачем — адже ви будете зіштовхуватися з цим механізмом щораз, коли захочете поставити новий компакт-диск!Сьогодні випускаються такі накопичувачі, у які можна завантажити відразу кілька компакт-дисків. Ці пристрої схожі на багатодискові програвачі для автомобілів.
КонтейнериЦей механізм завантаження дисків використовується в більшості високоякісних накопичувачів на компакт-дисках. Диск встановлюється в спеціальний щільно закритий контейнер з рухливою металевою заслонкою. При установці контейнера в накопичувач металева заслонка спеціальним механізмом зміщається вбік, відкриваючи лазерному променеві шлях до поверхні компакт-диску.Контейнери — самий зручний механізм завантаження дисків. Якщо усі ваші диски мають контейнери, то вам залишається тільки вибрати потрібний і вставити його в накопичувач (приблизно так само, як при роботі з 3,5-дюймовими дискетами). Контейнер можна спокійно брати в руки, не побоюючись забруднити або пошкодити поверхню компакт-диску. Крім захисту компакт-диску від забруднення й ушкоджень контейнер більш точно встановлюється в накопичувач. Це зменшує похибки позиціонування зчитуючого пристрою і, у кінцевому рахунку, час доступу до даних.Єдиний недолік контейнерів — їхня висока вартість. Після того як усі ваші диски будуть мати свої контейнери, робота з ними стане суцільним задоволенням — береш і вставляєш! Зрозуміло, що та коробочка, у яку був вкладений диск при покупці, стає просто не потрібною — її функції виконує контейнер.Ще одним немаловажним достоїнством накопичувачів, розрахованих на диски в контейнерах, є те, що їх можна встановлювати навіть боком. Висувні лоткиУ більшості простих накопичувачів на компакт-дисках для установки диска використовуються висувні лотки. Це такі ж пристрої, які застосовуються в програвачах звукових компакт-дисків класу CD-DA. Оскільки диски не треба укладати в окремі контейнери, механізм завантаження виходить більш дешевим. Правда, щораз при установці нового диска його необхідно брати в руки, а це підвищує ризик забруднити або подряпати його.Лоток сам по собі досить ненадійна конструкція. Його досить легко зламати, наприклад необережно зачепивши ліктем або упустивши що-небудь зверху в той момент, коли він висунутий з накопичувача. Крім того, будь-який бруд, що потрапив на диск або на лоток, втягується всередину пристрою при поверненні механізму в робоче положення. Тому накопичувачі з лотками не можна застосовувати в промислових або інших несприятливих зовнішніх умовах. Якщо компакт-диск покладений на лоток з перекосом, то при завантаженні можуть бути ушкоджені і диск і накопичувач. Єдине, щоправда, досить істотна перевага пристроїв цього типу — їхня дешевизна.
104
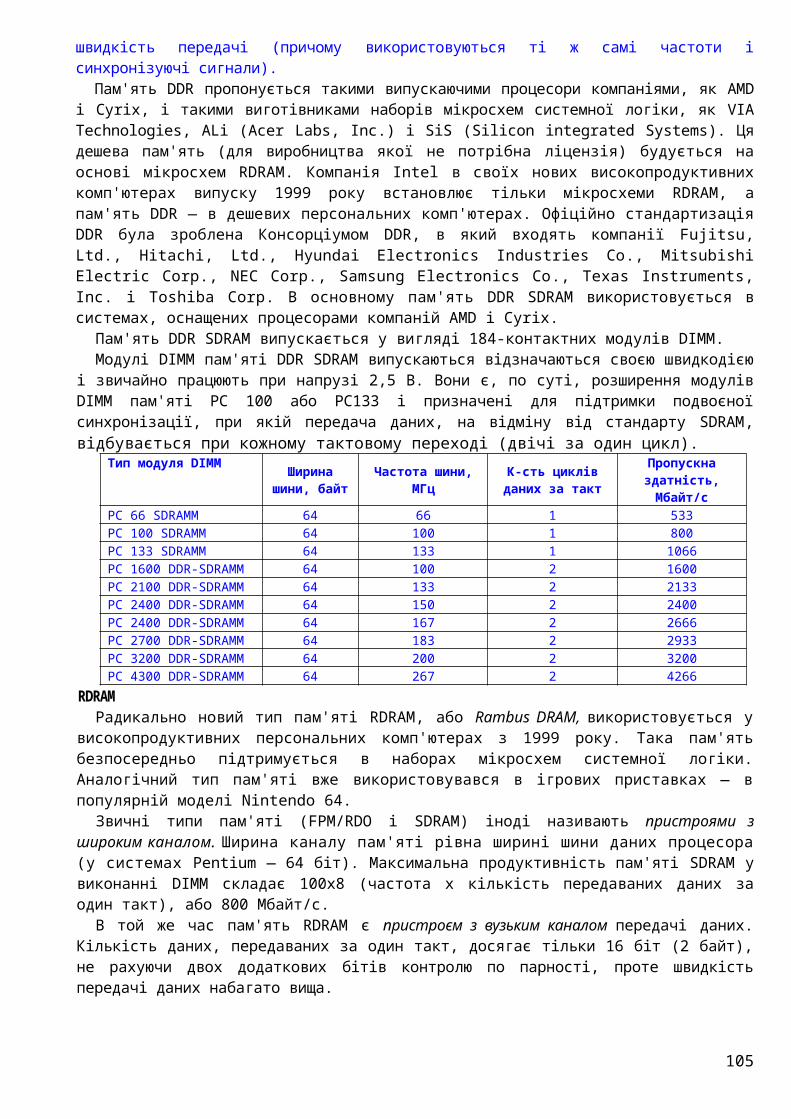
1.4. Інші особливості накопичувачів на компакт-дискахБезумовно, достоїнства пристроїв у першу чергу визначаються їхніми технічними характеристиками, але існують і інші немаловажні фактори. Крім якості конструкції і надійності, при виборі накопичувача необхідно враховувати такі його властивості:
• захист від пилу;• автоматичне очищення лінз;• тип накопичувача (зовнішній чи внутрішній).
Захист від пилу.Головними ворогами пристроїв на компакт-дисках є пил і бруд. Їхнє потрапляння в оптичний пристрій або в механізм приводить до помилок зчитування даних, або у кращому випадку — до зниження швидкодії. В одних накопичувачах лінзи та інші відповідальні вузли розташовуються в окремих герметизованих відсіках, в інших для запобігання попаданню пилу всередину накопичувача використовуються своєрідні "шлюзи" із двох заслонок (зовнішньої і внутрішньої). Усі ці міри дозволяють продовжити термін служби пристрою. Автоматичне очищення лінз.Якщо лінзи лазерного пристрою забруднені, зчитування даних сповільнюється, оскільки дуже багато часу іде на повторні операції пошуку і читання (у гіршому випадку дані можуть взагалі не зчитуватися). У таких випадках варто використовувати спеціальні чистячі диски. У деяких сучасних високоякісних моделях накопичувачів наявний вбудований пристрій очищення лінз. Він є досить корисним, коли комп'ютер працює в складних зовнішніх умовах.2. Основні параметри записуючих накопичувачів CD-ROMТепер є можливість створювати власні компакт-диски (як CD-ROM, так і аудіо) за допомогою нового покоління пристроїв — записуючих накопичувачів CD-ROM. Для цього необхідно придбати компакт-диск з можливістю запису і пристрій для здійснення цього, причому витрати будуть істотно нижчі, ніж при покупці іншого пристрою, наприклад Zip або Jazz. Компакт-диск з мжливістю запису найкраще підходить для архівування даних з погляду вартості і простоти процесу запису. Ще одною перевагою використання такого компакт-диску для створення архіву є тривалий термін збереження, набагато перевищуючи терміни збереження на інших пристроях (наприклад, таких як магнітна стрічка).Більшість записуваних накопичувачів CD-ROM — пристрої WORM (write-once, read many— однократний запис, багаторазове читання), призначені для тривалого збереження. Фактичним стандартом цього типу пристроїв стали накопичувачі CD-R. Вони ідеально підходять для резервного копіювання системи і подібних операцій. Однак при частому резервному копіюванні або архівуванні, незважаючи на низьку вартість носія, стає невигідно використовувати пристрої CD-R. В даному випадку необхідно звернути увагу на пристрої багаторазового запису CD-RW.2.1. Накопичувачі CD-RНа накопичувачах CD-R (CD-Recordable)— їх іноді називають CD-WORM (Compact-Disk Write-Once Read-Many) — ви можете записувати власні компакт-диски. Такі накопичувачі дуже зручні для невеликих фірм, що зацікавлені в поширенні своїх баз даних на компакт-дисках. Записаний майстер-диск можна тиражувати.Диск CD-R відрізняється від звичайного компакт-диску. На його поверхні не випалюються заглиблення. Чистий диск CD-R покритий шаром красячої речовини з такими ж відбиваючими властивостями, як в алюмінієвого покриття звичайного компакт-диску, і зчитувальний пристрій не зможе знайти на ньому жодного штриха. Коли на диск починають записувати дані, промінь лазера розігріває шар золота і шар красячої речовини. При нагріванні деякі ділянки поверхні починають розсіювати світло точно так само, як заглиблення на скляному майстру-диску звичайного компакт-диску. Пристрій, що зчитує, теж сприймає ці ділянки як заглиблення, хоча це просто "цятки" з меншим коефіцієнтом відбиття, які утворилися в результаті хімічної реакції при нагріванні золота і красячої речовини.Багато сучасних моделей накопичувачів CD-R можуть виконувати запис в усіх форматах (від ISO 9660 до ХА) і зчитувати дані подібно звичайним накопичувачам CD-ROM. Вартість пристроїв і чистих дисків постійно знижується.
Ємність дисків CD-RУсі диски CD-R мають стандартну ємність — 650 Мбайт, що еквівалентно 74 хвилинам музики. Деякі фірми випускають диски ємністю 700 Мбайт (80 хвилин музики). Звичайно "зайві" 50 Мбайт не пошкодять, але ящо використовувати стандартні диски, тоді є гарантія можливості прочитати їх на будь-яких типах оптичних накопичувачів.
105

Запис диска на накопичувачі CD-RНакопичувач CD-R на сьогоднішній час практично мають таку ж швидкість заису інформації як їх "побратим" CD-ROM швидкість зчитування. Найшвидші моделі CD-R записують і читають зі швидкістю 52х. Для запису CD-R необхідно спеціальне програмне забезпечення, здатне надати безперервний потік даних. При швидкості запису 48х необхідно забезпечити потік даних 7200 Кбайт/с. Це реалізується за допомогою буфера, що створюється на жорсткому диску і з якого дані записуються на CD-R.
Програмне забезпечення для запису CD-RЦе програмне забезпечення перетворить дані на жорсткому диску у формат CD-R. Найчастіше воно поставляється разом з накопичувачем.Для запису диска необхідно близько 1,5 Гбайт вільного місця на жорсткому диску. З них 650 Мбайт — це дані, які необхідно записати на CD-R. Усі необхідні дані з різних джерел, наприклад з дисків сервера, дисків комп'ютерів у локальній мережі, компакт-дисків і ін., треба "скласти" в одному місці. Ще 650 Мбайт буде зайнято "образом" диска, що створить програма запису з вашого матеріалу.При записі компакт-диску необхідно дотримуватися наступних рекомендацій.
• Намагайтеся для збереження матеріалу компакт-диску використовувати найшвидший жорсткий диск із встановлених у вашій системі. Для запису не використовуйте наступні джерела: накопичувачі на гнучких дисках, Zip або інші пристрої збереження даних з паралельним інтерфейсом, накопичувачі CD-ROM, пристрої мережі.
• Перед записом перевірте жорсткий диск на наявність помилок і, якщо дозволяє час, виконайте дефрагментацію.
• Відключіть систему керування живленням. • ЯКЩО комп'ютер підключений до мережі, то краще на час запису відключити його, щоб колеги
при пошуку потрібного файлу на вашому комп'ютері не перервали процес запису.• Перевірте кількість вільного місця на тимчасовому диску. Для запису компакт-диску ємністю
650 Мбайт необхідно звільнити як мінімум 1,3 Гбайт.• Не забудьте протерти м'якою тканиною поверхня записуваного компакт-диску.
Якщо після виконання цих рекомендацій при записі з'являються помилки, спробуйте зменшити швидкість запису.
Багаторазовий записБільшість сучасних накопичувачів CD-R підтримує багаторазовий запис. При покупці накопичувача зверніть увагу на його ХА-сумісність.2.2. Накопичувачі CD-RW.Після визначення стандарту CD-RW у "Жовтогарячій книзі" ці накопичувачі стали популярною альтернативою накопичувачам CD-R. Диск CD-RW можна перезаписувати мінімум кілька тисяч разів. Постійне зниження вартості пристроїв CD-RW дозволяє їх використовувати для резервного копіювання, архівування й інших задач збереження даних.Накопичувачі CD-RW ще іноді називають що стираємими CD (erase CD), або CD-E.Кількість циклів запису обмежується здатністю відбиваючої поверхні диска CD-RW. Багато стандартних накопичувачів CD-ROM і CD-R не можуть читати диски CD-RW, a виробники нових пристроїв забезпечують використання будь-якого формату дисків у своїх накопичувачах. Накопичувачі CD-RW можуть записувати диски CD-R і читати будь-які диски CD-ROM. Матеріал дисків CD-RWСвітлочутлива фарба на диску CD-R змінює відбиваючі властивості при попаданні променя лазера. Це зміна властивостей необоротня. Диск CD-RW також має шар, який змінює відбиваючу здатність при попаданні променя лазера, але на відміну від диска CD-R це оборотньо.Активний шар диска CD-RW являє собою сплав Ag-In-Sb-Te (срібло-індій-сурма-телур), що при звичайному стані володіє відбиваючими властивостями. Активний матеріал розташований поверх полікарбонатної основи, на якій створений спіральний зразок для точного позиціонування диска і правильного розташування канавок.При записі диска в накопичувачі CD-RW лазер працює на повній потужності (режим Pwrite) і розігріває активний матеріал до температури 500—700 °С, розплавляючи його. У такому стані матеріал втрачає відбиваючі здатності. Періодично розігріваючи за допомогою лазера активний матеріал, можна створити відбиваючі і не відбиваючі ділянки диска, тобто штрихи.
106

Для повернення диска в первісний стан лазер на низькій потужності (режим Perase) розігріває активний матеріал до температури 200 °С (нижче температури плавлення), і відбиваючі властивості відновлюються. Таким чином, зміна потужності лазера приводить до запису на диск інформації. Потрібно звернути увагу на те, що в такий спосіб не можна, не записавши даних, "очистити" диск.Читання дисків CD-RWСтандарт CD визначає, що поверхня компакт-диску повинна мати відбиваючу здатність не менш як 70% (тобто диск повинен відбити не менш 70% світла, яке падає на його поверхню). Відбиваюча здатність штрихів повинна бути не більш 28%. При створенні в 1980 році технології запису на компакт-диски чутливість фотодатчиків у програвачах CD була відносно невелика.Відбиваюча здатність диска CD-RW лежить у межах 15-25%, що істотно нижче необхідного мінімуму, визначеного стандартом. Однак різниця між відбиваючою здатністю диска і штрихів близько 60% (стандартне значення звичайного CD-ROM), чого цілком достатньо для правильного розпізнавання штрихів сучасними фотодатчиками. Таким чином, не потрібно ніяких додаткових змін у накопичувачі для читання дисків CD-RW.3. Накопичувачі DVD.Майбутнє компакт-дисків — цифровий універсальний диск, так званий DVD (Digital Versatile Disc). Це новий стандарт, що значно збільшує обсяг пам'яті і, отже, кількість використовуваних для компакт-дисків програм. Головна проблема сучасної технології CD-ROM полягає в тому, що вона жорстко обмежена об’ємом пам'яті диска. Диск CD-ROM може містити максимум 750 Мбайт даних, і хоча це дуже великий об’єм, але його виявляється недостатньо для багатьох нових програм, особливо для тих, у яких використовується відео.Новий DVD-стандарт може замінити відеокасети. У майбутньому, замість того щоб брати стрічку в місцевому відеопрокаті, ви зможете купити або взяти напрокат фільм на диску CD-ROM. Диски нового стандарту будуть застосовуватися на ринку розваг з таким же успіхом, як і на комп'ютерному ринку.3.1. Специфікації DVD.У відповідності зі стандартом DVD-диск є однобічним, одношаровим і містить 4,7 Гбайт інформації. Новий диск має такий же діаметр, як сучасні компакт-диски, однак він у два рази тонший (0,6 мм). Застосовуючи стиск MPEG-2, на новому диску можна розмістити 135 хвилин відео — повнометражний повноекранний фільм з повною кількістю кадрів, із трьома каналами якісного звуку і чотирма каналами субтитрів. Значення ємності диска не випадкове: стандарт створювався під егідою кіноіндустрії, що давно шукала недорогу і надійну заміну відеокасетам.Необхідно розуміти різницю між дисками DVD-Video і DVD-ROM. Перший містить тільки відео і відтворюється в програвачі DVD, а другий — різні типи даних і зчитується за допомогою накопичувача DVD у комп'ютері. Ці два типи дисків DVD можна порівняти зі звуковим компакт-диском і CD-ROM.Сучасні моделі накопичувачів DVD підтримують двошарові DVD-диски ємністю 8,5 Гбайт, двосторонні диски ємністю 9,4 Гбайт на одній стороні, а також двошарові диски ємністю 17 Гбайт. Для збільшення ємності DVD-диска можна змінювати такі параметри:
• зменшувати довжину штриха (~2,08х, від 0,972 до 0,4 мкм);• зменшувати відстань між доріжками (-2,16х, від 1,6 до 0,74 мкм);• збільшувати область даних (~1,02х, від 86 до 87,6 см );• забезпечувати більш ефективну модуляцію (~1,06х);• підвищувати ефективність коду корекції помилок (~1,32х);• зменшувати сектори (~1,06х, від 2 048/2 352 до 2 048/2 060 байт).
У накопичувачі DVD використовується лазер з меншою довжиною хвилі, що дозволяє зчитувати більш короткі штрихи. Для подвоєння розміру в накопичувачі DVD можна використовувати дві сторони диска і, крім того, можна записувати дані на два окремих шари кожної зі сторін.
З розвитком технології блакитного лазера вже в недалекому майбутньому можливе збільшення щільності в кілька разів. Пристрої DVD відрізняються швидкістю зчитування даних. Стандартна швидкість — 1,3 Мбайт/с, що приблизно еквівалентно накопичувачеві 9х CD-ROM. Час доступу складає близько 150—200 мс. На сьогоднішній день доступні накопичувачі DVD 16х. Як і звичайні накопичувачі CD-ROM, накопичувачі DVD випускаються з інтерфейсом SCSI і IDE/ATA, а крім того, оснащуються кабелем для підключення пристрою до звукового адаптера.Накопичувачі DVD цілком сумісні з попередніми стандартами, можуть зчитувати дані зі звичайних CD-ROM і програвати аудіодиски. При цьому швидкість зчитування буде еквівалентна швидкості звичайного накопичувача CD-ROM. Багато виробників почали встановлювати накопичувач DVD-ROM у випускаємі моделі комп'ютерів. Крім накопичувача, у комп'ютері встановлюється плата-декодер MPEG-2 для відтворення відео на
107

DVD-дисках. Відсутність такої плати позначиться на швидкодії системи, і, швидше за все, ви не зможете подивитися відеофільм на повному екрані. Така плата в даний час пропонується декількома виробниками устаткування.3.2. Стандарти DVDDVD — досить нова технологія і поки не "визначилася" зі стандартами. Стандарт відео на DVD-дисках підтримується творцями фільмів практично в усьому світі.Деякі компанії, включаючи Paramount, Disney і Fox, створили систему DIVX. Улітку 1999 року цей стандарт припинив своє існування через несумісність програвачів DVD з DIVX.У табл. 1.4 приводиться порівняння стандартів DVD.
1.4 - DVDТаблиця Стандарти
Стандарт Ємність Сумісність Примітки
DVD-RAM2,6 Гбайт на одній
стороні
Несумісні з накопичувачами DVD-
ROM
Необхідна операційна система Windows 95
OSR 2.x та нов.
DVD-R
3,95 Гбайт (оригінальний
диск)4,7 Гбайт (версія
1999 року)
Практично всі програвачі можуть
відтворювати ці диски
Нові моделі будуть підтримувати DVD-
RW
DVD-RW (оригінальна
назва DVD-R/W)4,7 Гбайт
Практично всі програвачі зможуть
відтворювати ці диски
Перші пристрої з'явилися
наприкінці 1999 року
DVD+RW2,8 Гбайт на одній
стороні
Деякі моделі накопичувачів DVD-
ROM фірм Sony і Philips можуть
працювати з такими дисками
Фірми HP, Philips і Sony випустили такі пристрої в середині
1999 року
У світі DVD постійно виникають конфлікти. На основі специфікації серпня 1997 року з'явилися диски DVD-R і DVD-RAM, а в жовтні 1997 року фірма Pioneer оголосила про створення пристрою для запису дисків DVD-R. Диск DVD-RAM перезаписуваний; крім того, він несумісний з дисками DVD-ROM. Диски DVD-R і DVD-RAM не підтримують кілька шарів; DVD-RAM можна записувати на обох сторонах. Фірми Philips, Sony і Hewlett-Packard оголосили про створення нового формату дисків, названого DVD+RW, що несумісний з існуючими форматами. Проте розроблений накопичувач може відтворювати диски DVD-ROM і звичайні компакт-диски. Фірма Pioneer розробила власний стандарт перезаписуваних DVD-дисків — DVD-R/W.4. Структурна схема накопичувача CD-ROMНакопичувачі CD-ROM відрізняються від програвачів музичних дисків в основному мікропроцесором, що виконує декодування електричних сигналів. У звукових програвачах записані на компакт-дисках цифрові дані перетворяться в аналогові електричні сигнали, що надходять потім на стереопідсилювач. При цьому допускаються невеликі похибки— головне, щоб вони лежали за межами чутливості людського слуху. При зчитуванні ж з накопичувача CD-ROM похибки неприпустимі. Кожен біт повинен бути зчитаний дуже точно, тому досить значну частину всього обсягу диска CD-ROM займають коди корекції помилок (Error Correcting Code — ЕСС). З їхньою допомогою можна в більшості випадків знайти і виправити неправильно зчитані дані, що дозволяє знизити ймовірність збоїв до прийнятної величини.
Нижче приведений алгоритм роботи накопичувача CD-ROM.1. Напівпровідниковий лазер генерує малопотужний інфрачервоний промінь, що попадає на
відбиваюче дзеркало.2. Серводвигун по командах, які надходить від вбудованого мікропроцесора, зміщає рухливу каретку
з відбиваючим дзеркалом до потрібної доріжки на компакт-диску.3. Відбитий від диска промінь фокусується лінзою, розташованою під диском, відбиває від дзеркала
і попадає на розділюючу призму.
108
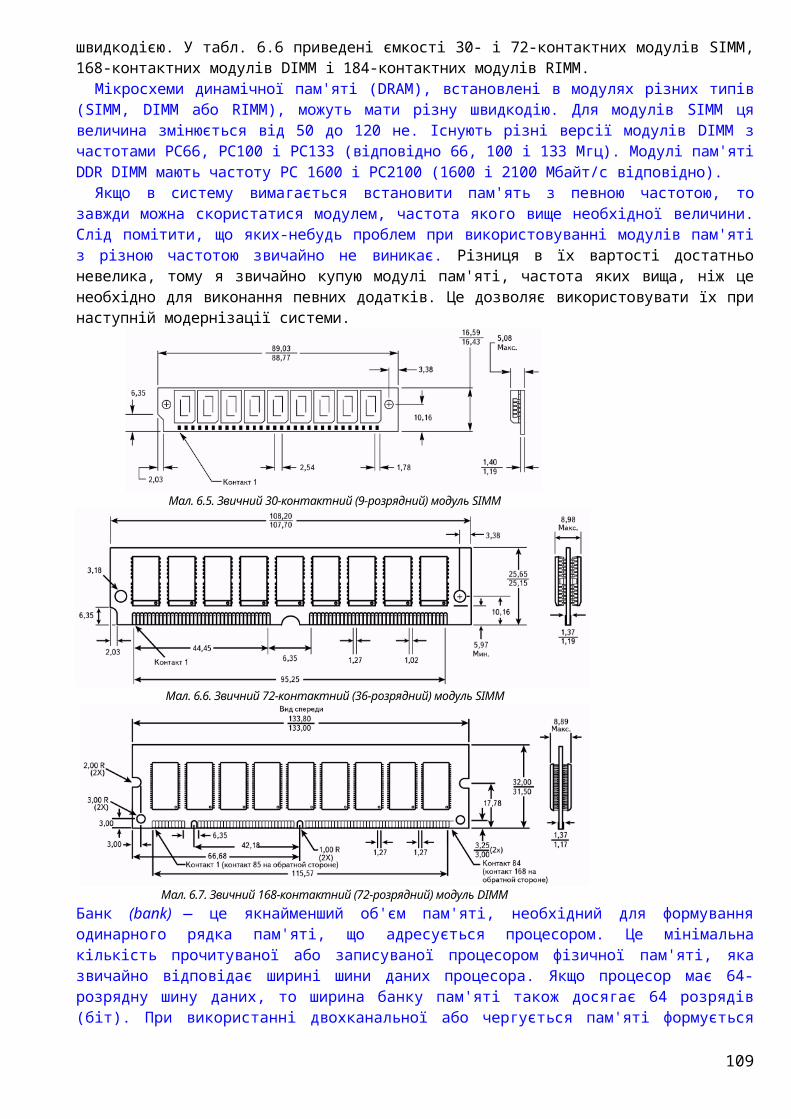
4. Розділююча призма направляє відбитий промінь на іншу фокусирующую лінзу.5. Ця лінза направляє відбитий промінь на фотодатчик, що перетворює світлову енергію в
електричні імпульси.6. Сигнали з фотодатчика декодуються вбудованим мікропроцесором і передаються в комп'ютер у
виді даних.
Рис. 1.1 - Структура накопичувача CD-ROMШтрихи, нанесені на поверхню диска, мають різну довжину. Інтенсивність відбитого променю змінюється, відповідним чином змінюючи електричний сигнал, що надходить на фотодатчик. Біти даних зчитуються як переходи між високими і низькими рівнями сигналів, що фізично записуються як початок і кінець кожного штриха.Оскільки для програмних файлів і файлів з даними важливий кожен біт, у накопичувачах CD-ROM використовуються досить складні алгоритми виявлення і корекції помилок. Завдяки таким алгоритмам імовірність неправильного зчитування даних складає менш I1025. Іншими словами, безпомилково зчитується два квадрильйони дисків, що відповідає стопці компакт-дисків висотою біля двох мільярдів кілометрів!Для реалізації цих методів корекції помилок до кожних 2048 корисних байт додається 288 контрольних. Це дозволяє відновлювати навіть сильно ушкоджені послідовності даних (довжиною до 1 000 помилкових бітів). Використання настільки складних методів виявлення і корекції помилок зв'язані з тим, що, по-перше, компакт-диски піддаються зовнішнім впливам, а по-друге, подібні носії споконвічно розроблялися лише для запису звукових сигналів, вимоги до точності яких не настільки високі.Якщо дані в програвачі звукових компакт-дисків зчитані неправильно, то вони інтерполюються. Наприклад, якщо три послідовних значення сигналу виражаються числами 10, 13 і 20 і середнє значення через ушкодження або забруднення поверхні диска втрачено, то його можна з високим ступенем ймовірності відновити як середнє значення між 10 і 20 (15). Незважаючи на те, що відновлене значення неточне, слухач не помітить цієї похибки. Якщо ж така ситуація виникне при зчитуванні з CD-ROM, наприклад, програмного файлу, то пропущений біт може з рівною імовірністю бути нульовим або одиничним, і інтерполювати його значення, природно, буде неможливо.Саме через настільки високі вимоги до точності відтворення накопичувачі CD-ROM з'явилися пізніше своїх музичних побратимів, а їхні перші зразки були занадто дорогими для масового покупця. Крім того, фірми-виробники трохи запізнилися з прийняттям відповідних стандартів, що стримувало виробництво CD-ROM. До того ж, була відсутня база програмного забезпечення, що могла б стимулювати збільшення темпів виробництва CD-ROM.Після зниження вартості виробництва накопичувачів і дисків вони все рівно не одержали належного поширення у світі PC. Це можна пояснити невеликими розмірами програм того часу. Зараз практично все програмне забезпечення поставляється на компакт-дисках, навіть якщо воно займає десяту частину диска. Виробники програм дотримують наступного правила: якщо програмний продукт займає більше двох дискет, раціональніше використовувати компакт-диск.Переваги запису на компакт-диск великих програм очевидні. Для поширення операційної системи Windows 98 треба було б близько 70 дискет, формат запису яких, розроблений фірмою Microsoft, дозволяє помістити на дискеті 1,71 Мбайт даних. Вартість виробництва, упакування і поширення такої кількості дискет непорівнянна з виробництвом одного компакт-диску.
109

Тема: Магніто-оптичні та Zip-диски. Нові напрямки в розвутку носіїв інформації .План.1. Магнітооптичні накопичувачі
2. Zip-накопичувачі.
3. Флеш-карти.
1. Магнітооптичні накопичувачіОднією із найпопулярніших технологій зйомних накопичувачів є магнітооптичні. Відкриті для
комерційного використовування в 1985 році, сучасні магнітооптичні накопичувачі мають ємкість
більше 5 Гбайт, що практично в 2,5 рази більше, ніж у самого ємкого знімного магнітного
накопичувача.Існує два типи магнітооптичних накопичувачів і носіїв: 3,5- і 5,25-дюймові ємністю до 640 Мбайт і 5 Гбайт
відповідно. У перших моделях магнітооптичних накопичувачів застосовувалася технологія одноразового запису, який дозволяв дописувати інформацію на носій, але не дозволяла її стирати. Такі накопичувачі ще можна зустріти на ринку, проте для користувачів стаціонарних комп'ютерів набагато більше поширені накопичувачі з можливістю повторного запису.
Магнітооптична технологіяПри нормальних температурах магнітна поверхня магнітооптичного диска дуже стабільна і
може зберігати дані близько 30 років. Для зміни даних на магнітооптичному диску
використовується лазерний промінь і магнітне поле. На мал. 12.8 показана схема процесів запису і
читання.
Оптичною частиною магнітооптичного накопичувача є лазерний промінь, який під час
стирання працює в режимі високої потужності, розігріваючи необхідну ділянку магнітооптичного
диска до температури приблизно 200°С ("точка Кюрі", в якій немагнітна в нормальних умовах
речовина стає сприйнятливою до магнітного поля). Це дозволяє стерти будь-яку існуючу на
розігрітій ділянці інформацію за допомогою однорідного магнітного поля, не зачіпаючи інші
частини диска, які мають нормальну температуру.
Після цього лазерний промінь і магнітне поле використовуються для запису інформації в певне
місце за рахунок збільшення випромінюваної потужності лазера і додатку контрольованого
магнітного поля до носія.
При прочитуванні лазер використовується в режимі низької потужності для створення
нейтрально поляризованого освітлення на поверхні магнітооптичного диска. Місця на диску, які
містять логічний 0, відображають світло з кутом поляризації, відмінним від кута поляризації
областей, що містять логічну 1. Ця різниця в один градус називається ефектом Керра.
У старих магнітооптичних накопичувачах для прочитування і запису необхідні дві різні
операції, проте в сучасніших, починаючи з Plasmon DW260, випущеного в 1997 році,
застосовується метод LIMDOW (Light Intensity Modulated Direct Overwrite) для однієї операції з
певними типами носіїв. У накопичувачах LIMDOW магніти вбудовані безпосередньо в сам диск, а
не використовуються у вигляді окремих магнітів, як в старих накопичувачах. Продуктивність
накопичувачів LIMDOW достатня для відтворення відеоданих у форматі MPEG-2, а крім того,
вони зручні для зберігання великих об'ємів інформації.
110

Мал. 12.8. У магнітооптичних накопичувачах лазер в режимі високої енергії застосовується для розігрівання
магнітної поверхні, щоб змінити магнітний стан ділянки диска під час циклу запису (зліва), а під час циклу
читання (справа) лазер перемикається в режим низької енергії
В даний час на ринку представлена безліч різноманітних магнітооптичних пристроїв. Найбільш
ширше поширені моделі, приведені в табл. 12.9.
Таблиця 12.9. Поширені магнітооптичні накопичувачі і носії
Розмір,
дюймів
Накопичувач і
інтерфейсЄмкість
Продуктивність,
Мбайт/с
Ціна
накопичу
вача,
доларів
Ціна
носія,
доларів
3,5
Fujitsu
DynaM0640SE,
зовнішній, SCSI
640 Мбайт, можна
використовувати
носії ємністю 540,
230 і 128 Мбайт
3,9 - максимальна для
носіїв ємністю 640
Мбайт (нижче для
носіїв меншої
ємкості)
329 25
5,25
Pinnacle Ultra
Magneto Optical
Drive, внутрішній,
SCSI
5,2 Гбайт, можна
використовувати
носії ємністю 4,8, 2,6,
1,3 Гбайт і 640 Мбайт
6,0 (читання), 3,5
(запис)1425 100
Існують зовнішні магнітооптичні накопичувачі розміром 5,25 дюйми з інтерфейсом SCSI, проте
їх ціна досить висока. Деякі виробники пропонують моделі для інтерфейсу ATAPMDE, але вони
не так широко поширені, як пристрої SCSI.
Порівняння магнітооптичних і магнітних накопичувачів
В порівнянні з поширеними знімними високоємкими накопичувачами магнітооптичні набагато
дорожчі (особливо 5,25-дюймові). Проте вартість мегабайта магнітооптичних накопичувачів
значно нижче, а крім того, термін зберігання їх носіїв істотно більше, а загальна продуктивність
вища. Поява операційних систем Windows 9д:/Ме і Windows NT/2000 істотно спростила установку
пристроїв SCSI, так що з цим проблем не виникне. Якщо ви можете дозволити собі покупку
дорогого 5,25-дюймового магнітооптичного накопичувача, то одержите достатньо швидкий і
надійний пристрій з дисками, що довго зберігаються; його також можна використовувати як
пристрій зберігання в щоденній роботі.
111

2. Zip-накопичувачі.Принцип роботи
Чому пристрій називається дисководом Zip? Ім'я ("Zip" по-англійськи означає: «миттєво
переміщати») цілком відповідає ключовим атрибутам продукту: швидкість, мобільність, простота і
безпека.
Ці накопичувачі можуть зберігати 100, 250, а тепер і 750 Мб даних на картриджах, що нагадують
дискету формату 3,5", забезпечують час доступу, рівний 29 мс і швидкість передачі даних, що
складає 7 Мб/с при використанні інтерфейсу SCSI. При цьому частота обертання диска складає
2945 об/хв – 3676 об/хв в залежності від типу пристрою.
Якщо пристрій підключається до системи через паралельний порт, то швидкість передачі даних
обмежена швидкістю паралельного порту. Накопичувачі Zip використовують спеціальні 3,5-
дюймові диски, також вироблені фірмою Iomega.
Фірма Iomega не випадково однієї з перших представила накопичувач зі змінним магнітним носієм
формату 3,5"; довгі роки вона займалася розробкою і продажем накопичувачів типу Bernoulli з
дисками ємністю 35, 65, 105 і 150 Мб. Диски типу Bernoulli вважаються самих міцних і надійними
з усіх змінних носіїв. По суті, вони являють собою гнучкі диски, вставлені у жорсткий футляр.
Принцип роботи дисків Bernoulli наступний. Диск у накопичувачі обертається, спираючись на
повітряну подушку, причому, зазор між диском і головками складає долі міліметра. Створюваний
обертовим диском повітряний потік відхиляється певним чином за допомогою, так званої,
пластини Бернуллі. Вона нерухома і розташовується таким чином, що диск підштовхується
повітряним потоком упритул до головки, але не торкався її. Диск обертається дуже швидко, і
дотик головок до поверхонь диска при таких швидкостях привів би до швидкого зносу поверхні
диска.
Популярний накопичувач Zip саме і є одним з варіантів накопичувачів Bernoulli фірми Iomega,
розробленим під стандарт 3,5" дисків. Однак у ньому використовуються і технології,
застосовувані при виробництві жорстких дисків.
Самі по собі пристрої, засновані на принципі Бернуллі, і жорсткі диски – пристрої досить надійні.
Але існує припущення, що саме сполучення цих двох технологій в одному пристрої і привело до
зниження його надійності.
Zip: конструкція, експлуатація, діагностика
Технологія змінного носія
На жаль, незважаючи на багаторазові спроби різних виробників випустити на ринок надійний
пристрій із знімними носіями, нікому з них поки не вдалося обдурити закони природи. Причина
досить прозаїчна – споконвічно саме поняття «змінний носій» не дуже-то «дружить» зі словом
«надійність».
Якщо провести аналогію між HDD і Zip-дисководом, то змінний картридж Zip – це вінчестер з
відкритою камерою.
Технологія зборки камер HDD передбачає їхнє виробництво тільки в чистих приміщеннях, що
відповідають вимогам класу 100. Це означає, що в одному кубічному футі повітря може бути
присутнім не більш 100 порошин розміром від 0,5 мкм (тому що головки летять над поверхнею на
висоті 0,08...0,5 мкм).
Крім того, робоча камера HDD герметизується і перекачування повітря ззовні в неї або взагалі не
відбувається, або здійснюється крізь спеціальний барометричний фільтр, здатний затримувати
частки розміром більші ніж 0,3 мкм. Усередині самої робочої камери HDD також знаходяться
112
додаткові повітряні фільтри рециркуляції, призначені для очищення внутрішньої «атмосфери»
герметичної камери від невеликих часток робочого шару носія, що, незважаючи на всі
обережності, все-таки обсипаються з дисків при посадках головок.
Завдяки всім цим обережностям виробника, HDD можуть працювати навіть в умовах сильного
забруднення навколишнього повітря.
Що ж картридж Zip? Він відкритий не тільки для мікроскопічних, але і для великих часток,
тютюнового диму, пилу, прокачуваного через комп'ютер, «аматорських» пальців і т.д.
Однією з основних причин, що приводять до виходу головок і поверхонь з ладу, є неефективна
робота фільтрів очищення повітря в робочій камері Zip Iomega.
Найпростіший фільтр, встановлений у картриджі Zip, справитися з великою кількістю пилу не
може, тому що він тільки частково виконує свої функції .
Зустрічі головок і поверхонь з частками пилу відбуваються досить часто, у результаті чого
головки швидко забруднюються і псують поверхню диска.
При подачі напруги живлення шпиндельний двигун розкручує диск до 2941 (3676) об/хв.
Конструкція блоку головок у Zip Iomega досить проста. Кожна головка встановлена на кінці
важеля на пружині, що злегка притискає неї до диска. Мало хто догадується про те, що без руху
диск як би затиснутий між парою головок (знизу і зверху).
На відміну від HDD, головки Zip не знаходяться увесь час у робочій камері, вони вводяться під час
роботи в картридж і виводяться після закінчення роботи з Zip Iomega. На наш погляд, це дуже
істотна відмінність, у порівнянні з HDD, що є фактором зниження надійності пристрою. Головки
HDD знаходяться в постійному повітряному потоці, а головкам Zip приходиться різко входити в
турбулентну зону, причому вони входять у робочу зону «стрибком із трампліна».
Рис. 1.2 - Конструкція головок Zip-дисководу
«Трамплін» потрібний для того, щоб розтиснути головки на початку їхнього старту із створенням
зазору між головками більшого, ніж товщина диска. «Трамплін» створюється спеціальним
пристосуванням, установленим на каретці магнітних головок, і складається з пари двосхилих
пластмасових рамп і металевих екстракторів, укріплених на кожній з головок (див. рис. 1.2). При
старті головок з місця їхнього паркування екстрактори наїжджають на похилі поверхні
(«трампліни»), розтискаються і, «плавно» з'їжджаючи (по задумах конструкторів) по схилу за
«трампліном», разом з головками опускаються на диск, де їх підхоплює й утримує на деякій
відстані від поверхні диска повітряний потік. Не дивно, що в подібному механізмі така
несправність, як обривши екстракторів зустрічається досить часто/
При вимиканні живлення, або ж по команді виконавчого пристрою головки виводяться з робочої
камери. При вимиканні живлення – вони різко висмикуються з робочої зони за допомогою досить
потужної поворотньої пружини (тому що блок головок досить масивний). При цьому вони
113

втягуються на місце паркування через іншу сторону двосхилих рамп («трамплін» навпаки) і
опускаються на спеціальний коврик з пористого матеріалу. Вважається, що коврик чистить
головки і знімає з них статичну напругу. Ймовірно, що екстрактори можуть відриватися і під час
приземлення. На наш погляд, уже сама по собі посадка на коврик для головок досить болісна,
тому що для нормального очищення їм необхідно із силою опуститися і проїхати по ньому як по
«нождачному папері». При такому приземленні і існує ймовірність відриву головок.
Конструктивні особливості привода головок Zip-дисководу
На відміну від HDD, в Zip-дисководі застосовується лінійний привод з рухливою котушкою.
Механізми привода головок з рухливою котушкою бувають двох типів: лінійні і поворотні. Ці
типи відрізняються тільки фізичним розташуванням магнітів і котушок.
Привод з рухливою котушкою являє собою електромагніт. Його конструкція нагадує конструкцію
звичайного гучномовця. При протіканні струму визначеної полярності котушка втягується або
висувається з зазору постійного магніту. У Zip рухлива котушка жорстко з'єднана з блоком
головок і розміщається в полі лінійного постійного магніту. Котушка і магніт ніяк не зв'язані між
собою: переміщення котушки здійснюється тільки під впливом електромагнітних сил (див.
рис. 1.4).
Рис. 1.4. - Конструкція привода Zip-дисководу
Лінійний привод, застосовуваний в Zip-дисководі, переміщає головки по прямій лінії, строго
вздовж лінії радіуса диска. Перевага полягає в тому, що при його використанні не виникає
азимутальних похибок, характерних для поворотного привода, але є істотний недолік: блок
головок у подібному механізмі повинен бути досить масивним, а для керування ними, потрібно,
відповідно, і досить масивний і, головне, потужний, двигун (див. рис. 1.4).
У силу своєї «важкої вагової категорії», а, відповідно, і нездатності працювати досить швидко,
лінійний привод не може застосовуватися в сучасних HDD.
У виробництві жорстких дисків використовується поворотний привод, що працює по тому ж
принципі, що і лінійний, але в ньому до рухливої котушки кріпляться кінці важелів головок. При
русі котушки щодо постійного магніту важелі переміщення головок повертаються, пересуваючи
головки до осі або до країв дисків. Завдяки невеликій масі така конструкція може рухатися з
великими прискореннями, що дозволяє істотно скоротити час доступу до даних. Швидкому
переміщенню головок сприяє і те, що плечі важелів виготовляються різними – те, на якому
змонтовані головки, має велику довжину.
114

Ймовірність виходу з ладу пристроїв де використовується масивний лінійний привод набагато
вища, ніж у пристроїв з поворотним приводом (відповідно, використання лінійного привода в Zip-
дисководі теж може служити причиною виникнення такої несправності, як обриви головок).
Z-доріжки
У пристроях з рухливою котушкою немає попередньо зафіксованих положень. Замість цього в них
використовується спеціальна система наведення (позиціонування), що точно підводить головки до
потрібної доріжки.
Система точного наведення головок на доріжки називається сервоприводом, а для його роботи
потрібен сигнал зворотного зв'язку, що несе інформацію про реальне взаємне розташування
доріжок і головок.
Коливання температур не позначаються на точності роботи привода. При стиску і розширенні
дисків (обертання, температура) усі зміни їхніх розмірів відслідковуються сервоприводом і
положення головок коректуються. Для пошуку конкретної доріжки використовується заздалегідь
записана на диску допоміжна інформація (сервокод). Оскільки сервокод зчитується безупинно, то
зміна розміру диска під впливом температури приводить до відстеження головкою змін положень
доріжки і втрат даних не відбувається.
Як правило, сервокоди записуються на носій виробником і не змінюються протягом усього
терміну його експлуатації. Відомо також, що для запису сервокодів необхідно дуже точне, дороге
устаткування, яке використовує лазерний приціл для точної установки головок, а відстань між
позиціями, де записуються сервокоди, визначається інтерференційним методом, з точністю до долі
хвилі лазерного випромінювання.
На жаль, немає інформації, і вона не публікується Iomega – про структуру сервокодів і місця
їхнього розташування на доріжках. Відомо, що службова інформація зберігається на спеціальних,
закритих для користувача доріжках диска картриджа, відомих як Z-доріжки. Кількість їх 4, на
кожній стороні по дві, причому одна з них – дублююча. Коли усі з цих чотирьох Z-доріжок
ушкоджені, немає можливості прочитати які-небудь дані з диска й інформація втрачається
назавжди.
Причому, ніяких відомих засобів відновлення або зміни мертвих Z-доріжок картриджа немає.
Ймовірно, вони можуть бути відроджені тільки виробником. Саме з Z-доріжками і зв'язана
проблема, що називається «Клік смерті».
Кліки – ознака того, що пристрій має проблеми з доступом до даних, які зберігається на дискеті. У
випадку виникнення таких проблем Zip-дисковод робить рекалібровку головок, тобто повертає
каретку з магнітними головками у вихідний стан, а потім знову виводить головки в положення над
дискетою для забезпечення стійкого читання сервоміток і запису інформації на диску. При цьому
робиться не тільки повторна спроба надійно замкнути зворотний зв'язок по більш стійкому
зчитуванню інформації на дискеті, але і відбувається «протирання» головок для видалення з них
нальоту магнітних часток і усунення електростатичного заряду, який зібрався на них.
Свопування
У Zip-дисководах використовується ще одна спеціальна функція (sweep) – свопування диска. Її
основне призначення – усунення наслідків повітряного тертя, що виникає між головкою і
поверхнею носія при великих оборотах обертання диска. (Хоча головки не торкаються поверхні
носія, вони розташовуються настільки близько до нього, що явище стирання поверхні виникає
неминуче). Крім того, у негерметичній камері бувають ще і стикання головок з порошинами. Якщо
115

головка буде постійно знаходитися в одному місці над доріжкою, то перераховані вище причини
приведуть до передчасного зносу поверхні диска.
Для того, щоб цього не відбулося, і виконується процедура свопування: коли звертання до
картриджа нема, блок головок рухається безупинно назад над поверхнею диска, послідовно
проходячи всі доріжки по зростаючій, а потім – по спадаючій, і навпаки. Таким чином,
відбувається постійний рух блоку головок уздовж поверхні диска, навіть якщо немає звертань до
диска. Тому не рекомендовано залишати Zip-диск у дисководі, якщо Ви в цей момент не працюєте
з ним.
3. Флеш-карти.Новітня технологія зберігання — флеш-пам'ять — протягом декількох років була основним або
допоміжним носієм даних для портативних комп'ютерів. Проте бурхливе зростання ринку
цифрових камер і МРЗ-плейєрів, що використовують цю пам'ять, привело до повсюдного
розповсюдження цих пристроїв.
Як працює флеш-пам'ятьФлеш-пам'ять відноситься до пристроїв тривалого зберігання. Дані в ній зберігаються у вигляді
блоків, а не байтів, як в звичних модулях пам'яті. Флеш-пам'ять також використовується в
найсучасніших комп'ютерах для мікросхем BIOS, перезаписуваних за допомогою процесу
тунельовання Фоулера-Нордхейма. Флеш-пам'ять повинна бути очищена перед записом нових
даних.
Висока продуктивність, низькі вимоги при тому, що перепрограмує і невеликий розмір новітніх
пристроїв флеш-пам'яті робить цей тип пам'яті прекрасним доповненням при використанні в
портативних комп'ютерах і цифрових камерах. У цій області флеш-пам'ять часто називають
"цифровою плівкою". На відміну від справжньої плівки, цифрова може бути стерта і використана
наново.
Типи пристроїв флеш-пам'ятіНа сьогоднішній день популярні декілька типів флеш-пам'яті і важливо знать, який з них
використовується у вашій цифровій камері. Нижче приведені основні типи сучасних пристроїв
флеш-пам'яті.
• CompactRash.
• SmartMedia.
• ATA PC Cards (PCMCIA).
• MultiMediaCard.
• Memory Stick.
На відміну від карт Memory Stick, які можна було придбати тільки у виробника — компанії
Sony, карти SmartMedia і CompactRash можна придбати у багатьох виробників.
CompactFlashФлеш-пам'ять CompactFlash була розроблена компанією SanDisk Corporation в 1994 році і
використовувала архітектуру АТА для емуляції дискового накопичувача; пристрій CompactRash
підключався до комп'ютера і йому, подібно решті дисків, привласнювалося ім'я диска.
116

Спочатку ця пам'ять мала розмір типу I (товщина 3,3 мм); новіший пристрій типу II (товщина 5
мм) має велику ємкість. Обидві карти CompactRash мають ширину 36,398 мм (1,433 дюйми) і
довжину 42,799 мм (1,685 дюйми). За розробку стандартів цього типу пам'яті відповідає асоціація
CompactRash (http: //vww.compactflash.org).
SmartMediaСпочатку відоме як SSHDC (Solid State Roppy Disk Card — твердотільна дискета), це
найпростіший пристрій: карти SmartMedia містять в собі тільки флеш-пам'ять без яких-небудь
ланцюгів управління. Іншими словами, для сумісності з рештою поколінь карт SmartMedia
необхідні додаткові пристрої. Форум Solid State Roppy Disk (http: //ssf dc .or. jp/english) відповідає
за розробку стандартів SmartMedia.
MultiMediaCard
Сучасний мініатюрний пристрій флеш-пам'яті MultiMediaCard (MMC), що запам'ятовує,
використовується в цифрових фотокамерах і безлічі інших пристроїв, включаючи інтелектуальні
телефони, МРЗ-плейєри, а також цифрові портативні відеокамери. Технологія ММС була спільно
розроблена компаніями SanDisk і Infineon Technologies AG (що була Siemens AG) в листопаді 1997
року. Цей пристрій використовує стандартний 7-контактний послідовний інтерфейс і включає
флеш-пам'ять із зниженою напругою живлення. До числа планованих розробок входить пристрій
флеш-пам'яті Secure MultiMediaCard, що запам'ятовує, призначене для запису авторської цифрової
музики. У 1998 році для підтримки стандарту ММС і розробки нових виробів була утворена
асоціація MultiMediaCard Association (www.nimca.org).
Sony Memory StickКомпанія Sony, яка веде розробки у області як портативних комп'ютерів, так і цифрових камер і
супутніх товарів, має власну версію флеш-пам'яті, відому під назвою Sony Memory Stick. У цьому
пристрої використовується унікальний перемикач захисту від стирання, який убереже
неакуратного фотографа від видалення знімків Великого Каньйону з уживаними автомобілями на
передньому плані, які він планував продавати через Web.
АТА-сумісна PC Card (PCMCIA)
Хоча формфактор PC Card (PCMCIA) використовується сьогодні для широкого спектру
пристроїв: від ігрових приставок до модемів, від адаптерів SCSI до мережевих адаптерів, спочатку
він замислювався для комп'ютерної пам'яті, що видно з колишньої абревіатури PCMCIA (Personal
Computer Memory Card International Association — Міжнародна асоціація карт пам'яті для
персональних комп'ютерів).
На відміну від звичних модулів пам'яті, пам'ять PC Card працює як дисковий накопичувач,
використовуючи стандарт PCMCIA ATA. Модуль PC Card буває трьох типів (тип I завтовшки 3,3
мм, тип П завтовшки 5 мм і тип ТТТ завтовшки 10,5 мм), при цьому всі три типи мають довжину
3,3 дюйми і ширину 2,13 дюйми. Карти типу I і П використовуються для АТА-сумісної флеш-
пам'яті, тоді як карти типа Ш використовуються для невеликих АТА-сумісних жорстких дисків.
- 'Порівняння пристроїв флеш пам яті
Вирішуючи питання про вибір пристрою зберігання інформації, бажано зіставити особливості
кожного продукту з вашими вимогами. Перед покупкою пристроїв флеш-пам'яті потрібно
перевірити наступне.
117

• Які пристрої флеш-пам'яті підтримуються вашою цифровою камерою або іншим
пристроєм?
• Яку ємкість підтримує ваш пристрій? Пристрої флеш-пам'яті мають ємність до 128 Мбайт
або навіть вище, проте не кожна цифрова камера може працювати з пристроями флеш-
пам'яті такої високої ємкості. Щоб одержати додаткову інформацію про сумісність,
відвідайте Web-вузол виробника карти флеш-пам'яті.
• Чим одні пристрої флеш-пам'яті кращі за інших? Деякі виробники покращують свої
продукти на додачу до базових вимог, що пред'являються до пристроїв флеш-пам'яті.
Наприклад, компанія Lexar випускає дві серії швидші, ніж звичні, карти (серії 4х і 8х), а
також модель, що підключаються до порту USB для швидкої передачі даних. При цьому
замість дорогого і громіздкого пристрою зчитування карт використовується звичний USB-
кабель.
У табл. 12.10 порівнюються основні типи пристроїв флеш-пам'яті.
Тільки карти ATA Data Rash можна напряму підключати до портативних комп'ютерів через
роз'єм PC Card. Вся решта типів пристроїв вимагає спеціальних адаптерів для передачі даних. На
мал. 12.9 показані відносні габарити пристроїв флеш-пам'яті
SmartMedia, CompactRash, Memory Stick і MultiMediaCard.
Переміщення пристроїв флеш-пам'яті з камери в комп'ютер
В даний час існує декілька пристроїв для перенесення даних з карт флеш-пам'яті цифрових
камер і інших пристроїв в комп'ютер. І хоча деякі цифрові камери поставляються з послідовним
кабелем RS-232, це найповільніший метод навіть для камер з низькою роздільною здатністю,
тобто менш одного мегапікселя (1000 крапок по горизонталі).
Мал. 12.9. Пристрої флеш-пам'яті SmartMedia, CompactFlash, Memory Stick і MultiMediaCard
Типи відеоадаптерівМонітору необхідне джерело вхідних даних. Сигнали, що подаються на монітор, поступають з
відеоадаптера, що вбудованого в систему або підключається до комп'ютера.Існує три способи підключення комп'ютерних систем до електронно-променевого або
рідкокристалічного монітора.• Окрема відеоплата. Цей метод, для реалізації якого потрібні роз'єми розширення AGP або
PCI, забезпечує найвищий рівень ефективності і максимальну експлуатаційну гнучкість при виборі об'єму пам'яті і необхідних можливостей.
118
• Набір мікросхем графічного ядра, вбудований в системну плату. Ефективність цього методу нижча, ніж при використанні окремої відеоплати, а об'єм пам'яті змінити практично неможливо.
• Набір мікросхем системної плати з інтегрованим відеоадаптером. Найнижча вартість будь-якої графічної конфігурації і досить низька ефективність, особливо для тривимірних ігор або роботи з графічними програмами. Роздільна здатність і можливості перенесення кольорів нижчі, ніж при використанні окремих відеоадаптерів.
Як правило, відеоадаптери використовуються в більшості систем, створених на основі системної плати Baby-AT або ATX, тоді як в системній плати LPX, NLX і Micro-АТХ звичайно використовуються вбудовувані набори мікросхем графічного ядра. У багатьох сучасних недорогих комп'ютерах, створених на базі системної плати формфактора Micro-ATX, Rex-ATX або NLX, використовуються набори мікросхем системної логіки з інтегрованою відеосистемою, як в серії Intel 810. Модернізація систем з інтегрованим графічним ядром (мікросхем відеосистеми, що містять набір, або набір мікросхем системної плати, включаючий графічне ядро) звичайно здійснюється за допомогою окремої відеоплати. Проте в системи такого типу роз'єм AGP як правило не включається.
ВідеоадаптериВідеоадаптер формує сигнали управління монітором. З появою в 1987 році комп'ютерів
сімейства PS/2 компанія IBM ввела нові стандарти на відеосистеми, які практично зразу ж витіснили старі. Більшість відеоадаптерів підтримує принаймні один з наступних стандартів:
• MDA (Monochrome Display Adapter);• HOC (Hercules Graphics Card);• CGA (Color Graphics Adapter);• EGA (Enhanced Graphics Adapter);• VGA (Video Graphics Array);• SVGA (Super VGA);• XGA (extended Graphics Array).В даний час на ринку можна знайти адаптери VGA, SVGA і XGA. Решта типів відеоадаптерів
вже можна вважати реліктами комп'ютерної ери.Адаптер VGA
У комп'ютерах PS/2 більшість схем відеоадаптера розташована на системній платі. Ці схеми реалізовані у вигляді спеціалізованої інтегральної мікросхеми і випускаються компанією IBM. Для того, щоб пристосувати новий стандарт до раніших систем, IBM випустила так званий адаптер дисплея PS/2 (PS/2 Display Adapter), який частіше називають платою VGA. Цей відеоадаптер містить всі електронні схеми, необхідні для підтримки специфікації VGA, на одній повнорозмірній платі з 8-бітовим інтерфейсом. Сама IBM давно припинила виробництво плати VGA, але вони ще зустрічаються в деяких комп'ютерах.
BIOS VGA — це програма, призначена для управління схемами VGA. Через BIOS програми можуть ініціювати деякі процедури і функції VGA, не звертаючись при цьому безпосередньо до адаптера. Таким чином, програми стають апаратно-незалежними і можуть викликати деякі функції, що зберігаються в системній BIOS.
Подальший розвиток і вдосконалення VGA, пов'язане з модернізацією апаратури, приведе до появи відповідної модифікації BIOS. При цьому можуть бути додані нові функції. Таким чином, адаптер VGA навіть після модернізації виконуватиме всі графічні і текстові функції, введені в його специфікацію у момент створення. Використовуючи адаптер VGA, можна працювати зі всіма програмами, спочатку розробленими для адаптерів MDA, CGA і EGA.
У ідеальному випадку програмісти повинні користуватися інтерфейсом BIOS, а не звертатися до програмно доступних компонентів відеоадаптера. Тільки в цьому випадку гарантується сумісність програм зі всіма нинішніми і майбутніми моделями відеоадаптерів. Проте досить часто програмісти, вважаючи, що це поліпшить якість продукту, звертаються до адаптера напряму, без посередництва BIOS. В результаті створюється високопродуктивний програмний продукт, міцно прив'язаний до однієї-єдиної моделі апаратури.
Вся апаратура VGA забезпечує відображення до 256 відтінків на екрані з палітри в 262 144 кольори (256 Кбайт). Природно, для цього повинен використовуватися аналоговий монітор.
119

Монітори VGA бувають не тільки кольоровими, але і монохромними. Накладаючи (підсумовуючи) сигнали всіх кольорів, одержують 64 градації сірого замість відтінків різних кольорів, причому перетворення кольору в яскравість виконується програмами BIOS. Програма підсумовування ініціалізується в тому випадку, якщо BIOS при завантаженні системи знаходить монохромний монітор. У цій програмі використовується перетворення, в якому формула бажаного кольору переписується так, щоб в неї були включені всі три основні кольори, внаслідок чого утворюється нова градація сірого. Таким чином, виведений на екран колір певної ділянки зображення полягає, наприклад, з 30% червоного, 59% зеленого і 11% синього, а виглядає як сірий. Користувачі, що віддають перевагу монохромному монітору, в цьому режимі можуть працювати з програмами, спроектованими для кольорового відображення.
В даний час основним адаптером VGA вважається адаптер з 16-ма кольорами і роздільною здатністю 640x480. Ці параметри повинні підтримуватися всіма адаптерами, що працюють під управлінням операційної системи Windows. Якщо при завантаженні системи виникають проблеми, то вона завантажується в так званому безпечному режимі, де за умовчанням використовується адаптер VGA в режимі 640x480, 16 кольорів.
Адаптери SVGAЗ появою відеоадаптерів XGA і 8514/А конкуренти IBM вирішили не копіювати ці розширення
VGA, а почати випуск дешевших адаптерів з роздільною здатністю, яка вища за роздільну здатність продуктів IBM. Ці відеоадаптери утворили категорію Super VGA, або SVGA.
SVGA володіють ширшими можливостями, ніж плата VGA. Спочатку SVGA не був стандартом. Під цим терміном малися на увазі численні і відмінні одна від одної розробки різних компаній, вимоги до параметрів яких були жорсткішими, ніж вимоги до VGA.
Наприклад, одні відеоадаптери пропонували декілька форматів зображення (800x600 і 1024x768) з роздільною здатністю вище, ніж у VGA, тоді як інші мали таку ж або навіть більшу роздільну здатність (але і обширнішу палітру відтворних відтінків в кожному форматі). Не дивлячись на відмінності, всі ці відеоадаптери відносяться до категорії плати SVGA.
Зовні плата SVGA мало чим відрізняється від своїх побратимів VGA. На них встановлені такі ж роз'єми.
Стандарти SVGA асоціації VESAУ жовтні 1989 року асоціація VESA, враховуючи складність програмування безлічі
модифікацій плати SVGA, що випускаються, запропонувала стандарт для єдиного програмного інтерфейсу з цією платою. До цієї асоціації увійшли представники більшості компаній, що випускають апаратуру для ПК, у тому числі і апаратуру відображення.
Мал. 15.9. Роз'їм SVGAТаблиця 15.4. Призначення контактів стандартного 15-контактного роз'єму VGAКонтакт Сигнал Напрям передачі 1 Червоний Вихід 2 Зелений Вихід 3 Синій Вихід 4 Монітор ID 2 Вхід 5 Логічний нуль (самотестування монітора) - 6 Загальний для червоного аналогового - 7 Загальний для зеленого заставного - 8 Загальний для синього аналогового - 9 Ключ (контакт пропущений) - 10 Загальний для синхронізації - 11 Монітор ID 0 Вхід 12 Монітор ID 1 Вхід 13 Синхронізація рядків Вихід
120
14 Синхронізація кадрів Вихід 15 Монітор ID 3 Вхід
Новий стандарт був названий VESA BIOS Extension. Якщо відеоадаптер задовольняє цьому стандарту, програмним шляхом легко визначити специфічні відповідності і використати їх надалі. Достоїнство VESA BIOS полягає у тому, що для роботи з будь-яким адаптером SVGA програміст може використовувати єдиний драйвер. З адаптерами SVGA різних моделей від різних виробників можна спілкуватися через єдиний програмний інтерфейс VESA.
В даний час більшість адаптерів SVGA, що випускаються, підтримує специфікацію VESA BIOS Extension. Ця підтримка в основному необхідна для DOS-програм реального режиму (в основному ігор) і операційних систем, відмінних від Windows. Для користувачів Windows 9x і Windows NT/2000 ці розширення BIOS не потрібні, оскільки для роботи використовується відеодрайвер встановленого відеоадаптера.
Існуючий стандарт VESA на плату SVGA передбачає використання практично всіх поширених варіантів форматів зображення і кодування колірних відтінків, аж до роздільної здатності 1280x1024 пікселів при 16 777 216 відтінках (24-бітове кодування кольору). Деякі відеоадаптери підтримують роздільну здатность 1880x1440. Проте іноді відеоадаптер SVGA, який рекламується як VESA-сумісний, не працює з конкретним драйвером, наприклад з драйвером на 800x600 пікселів з 256-ма кольорами, який входить в Windows.
Компоненти відеосистемиДля роботи відеоадаптера необхідні наступні основні компоненти:• BIOS (Basic Input/Output System — базова система вводу-виводу);• графічний процесор, іноді званий набором мікросхем системної логіки відеоадаптера;• відеопам'ять;• цифроаналоговий перетворювач, він же DAC — Digital to Analog Converter;• роз'єм;• відеодрайвер.Багато популярних адаптерів сьогодні мають додаткові модулі, призначені для спеціальних
цілей, наприклад для прискорення відображення тривимірних об'єктів.
Мал. 15.10. Hercules 3D Prophet ll GTS Pro— типовий відеоадаптер середнього класу, оптимізований для комп'ютерних ігор. У цьому адаптері, як і в більшості сучасних графічний плати, використовується незмінна Flash-BIOS
BIOS відеоадаптераВідеоадаптери мають свою BIOS, яка подібна системною BIOS, але повністю незалежна від неї.
(Інші пристрої в комп'ютері, такі як SCSI-адаптери, можуть також мати власну BIOS.) Якщо ви включите монітор першим і негайно подивитеся на екран, то зможете побачити пізнавальний знак BIOS відеоадаптера на самому початку запуску системи.
121
BIOS відеоадаптера, подібно системній BIOS, зберігається в мікросхемі ROM; вона містить основні команди, які надають інтерфейс між устаткуванням відеоадаптера і програмним забезпеченням. Програма, яка звертається до функцій BIOS відеоадаптера, може бути автономною програмою, операційною системою або системної BIOS. Звернення до функцій BIOS дозволяє вивести інформацію про монітор під час виконання процедури POST і почати завантаження системи до початку завантаження з диска будь-яких інших програмних драйверів.
BIOS відеоадаптера, як і системну BIOS, можна модернізувати двома способами. Якщо BIOS записана в мікросхемі EEPROM, то її вміст можна модифікувати за допомогою спеціальної програми, що поставляється виробником адаптера. Інакше мікросхему можна замінити новою, знову-таки поставляється виробником. BIOS, яку можна модифікувати за допомогою програмного забезпечення, іноді називається flash BIOS.
Оновлення BIOS відеоадаптера може бути потрібним в тому випадку, якщо старий адаптер використовується в новій операційній системі або виробник знаходить істотний дефект в первинному коді програми. Але не впадайте в спокусу модернізувати BIOS відеоадаптера тільки тому, що з'явилася нова, переглянута версія. Прагніть слідувати правилу: не модернізуйте, якщо в цьому немає необхідності.Графічний процесор
У конструкції відеоадаптера може використовуватися один з трьох типів процесора або спеціалізованого комплекту мікросхем. Тип пристрою, який буде встановлений в конкретній плати, практично не залежить від стандарту відображення, підтримуваного відеоадаптером VGA, SVGA або XGA.
Найстаріша архітектура відеоадаптерів називається структурою із збереженням кадру зображення (frame-buffer technology). Вона припускає методику побудови зображення, при якій відеоадаптер відповідає тільки за зберігання і регенерацію статичного кадру зображення. Сам же кадр будується виключно зусиллями програми і центрального процесора комп'ютера. Природно, при такій методиці на центральний процесор лягає величезне навантаження, оскільки він повинен практично повністю управляти побудовою всіх деталей зображення.
У сучасній комп'ютерній графіці застосовується також спеціалізований графічний співпроцесор. Така архітектура припускає включення до складу відеоадаптера власного процесора, який виконував би всі обчислення, необхідні для побудови зображення. При цьому центральний процесор майже повністю звільняється для виконання інших задач (не пов'язаних безпосередньо з формуванням картинки). Таким чином, відібравши практично всі графічні функції у центрального процесора комп'ютера і поклавши їх на спеціалізований (максимально для цього пристосований) процесор відеоадаптера, ця архітектура забезпечує мінімальний час реакції системи.
Існує проміжний варіант архітектури — відеоакселератор (accelerator chip) з обмеженим набором функцій. Така архітектура, вживана в багатьох відеоадаптерах, представлених на сучасному комп'ютерному ринку, припускає, що електронні схеми відеоадаптера вирішують алгоритмічно прості, але віднімаючі багато часу задачі. Зокрема, електронні схеми відеоадаптера виконують побудову графічних примітивів — прямих ліній, кіл і т.п., а за центральним процесором комп'ютера залишається конструювання зображення, розкладання його на складові і пересилка у відеоадаптер інструкцій, наприклад: намалювати прямокутник певного розміру і кольору.
У сучасних графічних системах застосовується також процесор тривимірної графіки (ЗD-графіки), використовуваний практично у всіх відеоадаптерах, оптимізованих для комп'ютерних ігор, а також в більшості найпоширеніших відеоплат. Процесор тривимірної графіки, що є блоком обробки ЗD-графіки, розташовується в наборі мікросхем акселератора і використовується для формування зображення багатокутників, створення світлових ефектів і промальовування півтонів. Вартість ЗD-графічних процесорів залежить від використаних наборів мікросхем, модулів пам'яті і швидкодії RAMDAC (цифроаналогового перетворювача з ОЗУ).
Таким чином, при виборі відеоадаптера уважно віднесіться до підбору необхідного набору мікросхем і зверніть увагу на виконувані їм операції.
Системна плата з інтегрованим графічним ядромВпродовж цілого ряду років вбудована графічна система була одним з основних елементів
недорогих комп'ютерів. При цьому аж до недавнього часу більшість стандартних компонентів
122

графічної системи була перенесена безпосередньо на системну плату. У багатьох недорогих системах, зокрема створених на основі системної плати форм-фактора LPX, стандартні відеосхеми типа VGA були включені в системну плату. Робочі характеристики і можливості вбудованої відеосистеми лише небагато чим відрізняються від плати розширення, використовуючих ті ж або подібні набори мікросхем. Крім того, в більшості випадків вбудовану відеосистему можна з успіхом замінити відеоадаптером.
Слід помітити, що процес інтеграції системної плати з іншими компонентами привів до розробки наборів мікросхем, що включають підтримку відео- і аудіофункцій 3D. По суті, в набір мікросхем системної плати була включена велика частина раніше згадуваних компонентів відеоплати, при цьому як відеопам'ять використовується частина основної системної пам'яті. Метод сумісного використовування основної системної пам'яті, що одержав назву уніфікованої архітектури пам'яті (Unified Memory Architecture — UMА), також використовувався вбудованим графічним ядром, що містить власні набори мікросхем. Проте з підвищенням ступеня інтеграції наборів мікросхем системної плати цей метод набув ширше поширення.
Першою серед виробників інтегрованих наборів мікросхем, що містять відео і аудіокомпоненти, була компанія Cyrix. У Cyrix, що входила тоді в корпорацію National Semiconductor, був розроблений набір з двох мікросхем, що одержав назву MediaGX. Набір MediaGX об'єднав в собі функції процесора, контроллера пам'яті, обробки звуку і графіки, що дозволило значно зменшити вартість комп'ютерів, що випускаються (правда, їх продуктивність була набагато нижчою, ніж систем класу Pentium з аналогічними тактовими частотами). Після того, як компанія Cyrix була продана VIA Technologies, в National Semiconductor створили поліпшену версію MediaGX, що одержала назву Geode GX1, яка призначалася для використовування в малопотужних мережевих клієнтах-терміналах, інтерактивних комп'ютерних приставках і інших пристроях.
Компанія Intel стала наступним розробником інтегрованих наборів мікросхем, що сповістила із створенням набору серії 810 (кодова назва Whitney) про початок широкомасштабної промислової підтримки цієї конструкції. До числа наборів мікросхем Intel, що мають інтегроване графічне ядро, відносяться наступні:
• все сімейство Intel 810;• Intel 815 і 815Е.Intel не є єдиною компанією, розробляючою інтегровані набори мікросхем; існує ще декілька
провідних виробників, що займаються створенням подібних наборів мікросхем системної логіки, призначених для недорогих комп'ютерів і системної плати, створеної на базі процесорів Intel і AMD.
На жаль, перераховані набори мікросхем не зможуть задовольнити любителів сучасних комп'ютерних ігор. Не дивлячись на це, інтегрованої графічної системи, створеної на їх основі і включаючої підтримку AGP 2х і швидших 3D-функций, цілком достатньо для користувача, що працює із стандартними офісними програмами.
Відеопам'ятьПри формуванні зображення відеоадаптер звертається до пам'яті. Місткість пам'яті на
відеоадаптері (відеопам'яті) може бути різною: 4, 8, 16, 32, 64 або 128 Мбайт. Більшість сучасних плати мають мінімум 64 Мбайт, а в багатьох комп'ютерах встановлена відеопам'ять об'ємом 128 Мбайт. Додаткова пам'ять не збільшує швидкодії відеоадаптера, але дозволяє підвищити роздільну здатність зображення і/або кількість відтворних кольорів.
Як відеопам'ять можуть використовуватися мікросхеми пам'яті різних типів.
Прискорювачі тривимірної графіки (3D Accelerator)
Зображення тривимірних об'єктів можуть складатися з величезної кількості елементів. У програмах створення тривимірної графіки використовується технологія зберігання в пам'яті і обробки не самих зображень, а набору абстрактних графічних елементів, що становлять ці зображення. До недавнього часу для перетворення цих абстрактних елементів в "живі" образи, крім програм створення тривимірної графіки, потрібні спеціальні програми. Вони перенавантажували процесор, і, як наслідок, сповільнювалася робота всієї решти програм.
123

Зараз ситуація змінилася. Поєднання вищих роздільних здатностей екрану, 24- або 32-розрядного кольору і спеціальних процесорів для обробки тривимірної графіки привело до появи комп'ютерних ігор нового покоління. Наприклад, сучасні тривимірні спортивні ігри, що дозволяють змінювати освітлення і кут огляду, настільки реалістичні, що випадковий спостерігач цілком може прийняти гру за звичну телепередачу.
Набір примітивних тривимірних об'єктів, вживаних в ранніх комп'ютерних іграх, давно не відповідає сьогоднішнім вимогам. В цілому персональні комп'ютери мають серйозних конкурентів в ігровому світі (більш того, зараз індустрія префіксальних ігор витісняє ігри для ПК) в особі високоефективних спеціалізованих ігрових консолей, таких як Sony PlayStation 2 і Nintendo GameCube (а також Xbox від Microsoft, яка була створена на базі персонального комп'ютера). Щоб залишитися "на плаву" в світі розваг, що бурхливо розвивається, персональний комп'ютер повинен ефективно працювати з тривимірною реалістичною анімацією, виконуваною в режимі реального часу. Саме цю потребу і забезпечують акселератори тривимірної графіки.
Отже, головною функцією програм створення тривимірної графіки є перетворення графічних абстрактних об'єктів в зображення на екрані комп'ютера. Як правило абстрактні об'єкти включають три складових.
• Вершини. Задають місцеположення об'єкту в тривимірному просторі; саме їх положення задається координатами X, У і Z.
• Примітиви. Це прості геометричні об'єкти, за допомогою яких конструюються складніші об'єкти. Їх положення задається розташуванням визначальних точок (звично вершин). Для конструювання зображень тривимірних об'єктів при побудові примітивів враховується також ефект перспективи.
• Текстури. Це двомірні зображення, або поверхні, що накладаються на примітиви. Програмне забезпечення підсилює ефект тривимірності, змінюючи вид текстур залежно від положення примітиву (тобто відстані до примітиву і його нахилу); цей процес називається перспективною корекцією. У деяких програмах використовується інша процедура, звана відображенням MIP; в цьому випадку застосовуються різні версії однієї і тієї ж текстури, які містять різну кількість деталей (залежно від відстані до об'єкту в тривимірному просторі). При відображенні об'єктів, що віддаляються, зменшується насиченість і яскравість кольорів текстури.
Ці абстрактні математичні описи повинні бути візуалізовані, тобто перетворені у видиму форму. Процедура візуалізації грунтується на жорстко стандартизованих функціях, призначених для складання цілісного зображення, що виводиться на екран, з окремих абстракцій. Нижче представлені дві стандартні функції.
• Геометрізація. Визначення розмірів, орієнтації і розташування примітивів в просторі і розрахунок впливу джерел світла.
• Растеризація. Перетворення примітивів в пікселі на екрані з нанесенням потрібних затінювань і текстур.
У сучасні відеоадаптери, в яких графічний процесор може виконувати функції прискорення тривимірної графіки, вбудовуються спеціальні електронні схеми, що виконують растеризацію набагато швидше, ніж програмне забезпечення. Нижче перераховані функції растеризації, здійснювані більшістю призначених для цього сучасних наборів мікросхем.
• Растрове перетворення. Визначення того, які пікселі екрану покриваються кожним з примітивів.
• Обробка півтонів. Колірне наповнення пікселів з плавними колірними переходами між об'єктами.
• Утворення текстури. Накладення на примітиви двомірних зображень і поверхонь.• Визначення видимості поверхонь. Визначення пікселів, що покриваються найближчими до
глядача об'єктами.• Анімація. Швидке і чітке перемикання між послідовними кадрами рухомого зображення.• Згладжування. Плавна зміна колірних меж для згладжування контурів формованих об'єктів.
Технологія тривимірної графікиПрактично у всіх прискорювачах тривимірної графіки застосовуються описані нижче
технології.
124

• Затуманення. Імітація газу або туману в іграх.• Затінювання Гуро. Інтерполяція кольорів для згладжування нерівностей кола і сфери.• Альфа-змішування. Одна з перших технологій тривимірної графіки, використовувана для
створення реалістичних об'єктів, наприклад "прозорого" диму, води і скла.Нижче перераховані технології, найчастіше використовувані в сучасних прискорювачах
тривимірної графіки.• Буфер шаблонів. Активно використовується в іграх (особливе в жанрі авіасимуляторів) при
моделюванні ландшафту, літаків і інших об'єктів поза скляною кабіною льотчика.• Z-буферизація. Спочатку застосовувалася в системах автоматизованого проектування.
Частина відеопам'яті, відведена під Z-буфер, містить інформацію про глибину сцени. При візуалізації ця інформація використовується для побудови закінченого зображення: пікселі, які розташовуються ближче, будуть візуалізовані, на відміну від пікселів, закритих іншими об'єктами.
• Рельєфне текстурірованіє. Призначено для відтворення спеціальних світлових ефектів, таких, як водні брижі, каміння і інші складні поверхні. Це додає велику реалістичність ігровим сценам і ландшафтам.
• Поліпшені технології накладення текстур. Для візуалізації тривимірних сцен з високим ступенем деталізації необхідно застосовувати спеціальні методи накладення текстур, які усувають небажані ефекти і роблять сцени реалістичнішими.
• Білінейная фільтрація. Поліпшення якості зображення невеликих текстур, поміщених на великі багатокутники. Ця технологія усуває ефект "блоковості" текстур.
• Множинне відображення. Поліпшення якості відображення об'єктів шляхом формування послідовності текстур одного і того ж зображення з роздільною здатністю, що зменшується; є різновидом згладжування.
• Трілінейная фільтрація. Комбінація білінейной фільтрації і так званого накладення mip mapping (текстури, що мають різний ступінь деталізації залежно від відстані до точки спостереження).
• Анізотропна фільтрація. Використовувана в деяких відеоадаптерах, дозволяє зробити сцену ще реалістичнішої. Проте ця технологія поки не набула належного поширення через високі вимоги до апаратної частини відеоадаптера.
• Однопрохідна або мул'тіпроходная візуалізація. У різних відеоадаптерах застосовуються різні технології візуалізації. В даний час практично у всіх відеоадаптерах фільтрація і основна візуалізація виконуються за один прохід, що дозволяє збільшити частоту кадрів.
• Апаратне або програмне прискорення. При апаратний виконуваній візуалізації досягається набагато краща якість зображень і швидкість анімації, ніж при програмній. Використовуючи спеціальні драйвери, нові відеоадаптери виконують всі потрібні обчислення з нечуваною раніше швидкістю. Для роботи з програмами тривимірної графіки, а також для сучасних ігор це технологічне рішення просте неоцінимо.
• Щоб забезпечити таку продуктивність, більшість відеоадаптерів працює на високих частотах (іноді перевищуючих робочу частоту мікросхеми, тобто розігнані), а отже, виділяють велику кількість тепла. Для усунення перегріву застосовуються вентилятори і теплоотводи (мал. 15.12).
• Повноекранне згладжування. Зменшення нерівностей, що виникають при збільшенні дозволу, за допомогою згладжування колірних меж для забезпечення плавних колірних переходів. Раніше згладжування використовувалося тільки для певних об'єктів; сучасні акселератори, створені компаніями nVidia і АІ, дозволяють використовувати цю технологію для всього екрану.
• Сполучення/згладжування вершин. Згладжування областей зчленовувань двох полігональних об'єктів, наприклад рук або ніг з тілом анімованого персонажа. Для виконання функції сполучення вершин у відеоадаптерах серії GeForce компанії nVidia використовується двохматрична технологія на програмній основі, а в процесорі RADEON компанії ATI використовується, у свою чергу, чотирьохматричне сполучення, підтримуване на апаратному рівні.
• Інтерполяція ключового кадру або трансформація вершин. Пожвавлення переходу від одного виразу обличчя до іншого, що дозволяє за відсутності скелетної анімації зробити міміку
125

обличчя реалістичнішої. Для отримання докладнішої інформації звернетеся на Web-вузол компанії ATI.
• Програмована трансформація вершин і обробка півтонів. Технологія nfiniteFX компанії nVidia (відеоадаптер GeForceS), дозволяюча розробникам програмного забезпечення модифікувати ефекти на зразок сполучення вершин і обробки півтонів (поліпшений метод перетворення неправильних поверхонь). Це дозволяє позбавитися застосування щодо малої кількості ефектів з наперед певними характеристиками.
Аудіоадаптери.Починаючи з 1988 року звукові пристрої стають невід'ємною частиною кожного персонального
комп'ютера. В процесі конкурентної боротьби був вироблений універсальний, широко підтримуваний стандарт звукового програмного і апаратного забезпечення. Звукові пристрої перетворилися з дорогих екзотичних доповнень в звичну частину системи практично будь-якої конфігурації.
У сучасних комп'ютерах апаратна підтримка звуку може бути реалізована в одній з наступних форм:
• аудіоадаптер, що поміщається в роз'єм шини PCI або ISA;• мікросхема на системній плати, що випускається компаніями Crystal, Analog Devices,
Sigmatel, ESS і др.;• звукові пристрої, інтегровані в основний набір мікросхем системної плати, до яких
відносяться найсучасніші набори мікросхем компаній Intel, SiS і VIA Technologies, створені для недорогих комп'ютерів.
Область застосування звукової платиМультимедійний комп'ютер, оснащений колонками і мікрофоном, володіє рядом можливостей:• додавання стереозвуку до розважальних (ігрових) програм;• збільшення ефективності навчальних програм (для маленьких дітей);• додавання звукових ефектів в демонстраційні і повчальні програми;• створення музики за допомогою апаратних і програмних засобів MIDI;• додавання у файли звукових коментарів;• реалізація звукових мережевих конференцій;• додавання звукових ефектів до подій операційної системи;• звукове відтворення тексту;• програвання аудіокомпакт-дисків;• програвання файлів формату mрЗ;• програвання відеокліпів;• відтворення DVD-фільмів;• підтримка управління голосом.
Роз'єми звукової платиБільшість звукових плат має однакові роз'єми. Через ці мініатюрні (1/8 дюйма) роз'єми сигнали
подаються з плати на акустичні системи, навушники і входи стереосистеми; до аналогічних роз'ємів підключається мікрофон, програвач компакт-дисків і магнітофон. Колірні позначення роз'ємів кожного типу визначені в керівництві РС99 Design Guide і можуть варіюватися для різних звукових адаптерів.
• Лінійний вихід плати. Сигнал з цього роз'єму можна подати на зовнішні пристрої — акустичні системи, навушники або на вхід стереопідсилювача, за допомогою якого сигнал можна підсилити до певного рівня. У деякій звуковій платі, наприклад в Microsoft Windows Sound System, є два вихідні гнізда: одне для сигналу лівого каналу, а інше — для правого.
• Лінійний вхід плати. Цей вхідний роз'єм використовується при мікширування або запису звукового сигналу, що поступає від зовнішньої аудіосистеми на жорсткий диск.
126

Мал. 16.1. Основні роз'єму введення і висновку, характерні для більшості звукових адаптерів
• Роз’єм для акустичної системи і навушників. Цей роз'єм присутній не у всіх платах. Сигнали на акустичні системи подаються з того ж роз'єму (лінійного виходу), що і на вхід стереопідсилювача. Якщо на платі є два окремих вихідних роз'єми, то на тому з них, який призначений для акустичних систем і навушників, сигнал потужніший — він повинен забезпечити нормальний рівень гучності для навушників і невеликих акустичних систем. Вихідна потужність більшості звукових плат складає приблизно 4 Вт. Сигнал на лінійному виході при цьому не проходить через підсилювальний каскад, і тому якість звуку в ньому вища.
• Мікрофонний вхід, або вхід монофонічного сигналу. До цього роз'єму підключається мікрофон для запису на диск голосу або інших звуків. Запис з мікрофону є монофонічним. Для підвищення якості сигналу в багатьох звукових платах використовується автоматичне регулювання підсилення (Automatic Gain Control — AGC). Рівень вхідного сигналу при цьому підтримується постійним і оптимальним для перетворення. Для запису краще всього використовувати електродинамічний або конденсаторний мікрофон, розрахований на опір навантаження від 600 Ом до 10 кОм. У деяких дешевих звукових платах мікрофон підключається до лінійного входу.
• Роз’єм для джойстика/MIDI. Для підключення джойстика використовується 15-контактний D-подібний роз'єм. Два його контакти можна використовувати для управління пристроєм MIDI, наприклад клавішним синтезатором. (В цьому випадку необхідно придбати Y-подібний кабель). Деякі звукові плати для пристроїв MIDI мають окремий роз'єм. У деяких сучасних комп'ютерах порт для джойстика може знаходитися на системній платі або на окремій платі розширення. В цьому випадку при підключенні ігрового контроллера необхідно уточнити, який саме використовується в поточній конфігурації операційної системи.
• Роз’єм MIDI. Аудіоадаптери звичайно використовують той же порт джойстика, що і роз’єм MIDI. Два контакти в роз'ємі призначені для передачі сигналів до пристрою MIDI (наприклад, клавішному синтезатору) і від нього. В більшості випадків краще придбати окремий роз'єм MIDI у виробника аудіоадаптера, який включається в порт джойстика. Такий роз'єм має два круглі 5-контактні роз'єми DIN, використовувані для підключення пристроїв MIDI, а також роз’єм для джойстика. Оскільки сигнали для пристроїв MIDI і джойстика передаються по різних контактах, можна підключати джойстик і пристрій MIDI одночасно. Таким чином, якщо ви плануєте підключати до персонального комп'ютера зовнішні пристрої MIDI, то вам потрібен тільки цей роз'єм. А файли MIDI, одержувані з Web-серверів, можна відтворювати за допомогою внутрішнього синтезатора звукової плати.
• Внутрішній контактний роз'єм. На багатьох звукових платах є спеціальний роз'єм для підключення до внутрішнього накопичувача CD-ROM. Це дозволяє відтворювати звук з компакт-дисків через акустичні системи, підключені до звукової плати. Зверніть увагу, що цей
127

роз'єм відрізняється від роз'єму для підключення контроллера CD-ROM до звукової плати, оскільки дані по цьому внутрішньому роз'єму не передаються на шину комп'ютера. Але навіть якщо цього роз'єму немає, ви все одно можете прослуховувати аудіокомпакт-диски через акустичну систему, під'єднавши за допомогою зовнішнього кабелю лінійний вхід звукової карти до вихідного роз'єму для навушників на приводі CD-ROM. При установці CD-ROM, CD-RW, дисковода DVD або нового звукового адаптера не забудьте з'єднати дисковод і звукову плату за допомогою внутрішнього CD-кабелю; інакше ви не зможете відтворювати музичні компакт-диски або чути звуковий супровід деяких ігор.
Додаткові роз'ємиБільшість сучасних звукових адаптерів підтримує можливості відтворення DVD, обробки звуку
і т.д., а отже, мають декілька додаткових роз'ємів.• Вхід і вихід MIDI. Такий роз'єм, не поєднаний з ігровим портом, дозволяє одночасно
використовувати як джойстик, так і зовнішні пристрої MIDI.• Вхід і вихід SPDIF (SP/DIF). Цей роз'єм (Sony/Philips Digital Interface) використовується для
передачі цифрових аудіосигналів між пристроями без їх перетворення до аналогового вигляду. Деякі виробники інтерфейс SPDIF називають Dolby Digital.
ЗауваженняУ з'єднувачах SPDIF використовуються кабелі із стандартним роз'ємом RCA, що мають хвильовий опір, рівний 75 Ом (як і кабелі складового відеосигналу). Це дозволяє використовувати кабелі складового відеосигналу, що мають роз'єми RCA, із з'єднувачами SPDIF. Не дивлячись на те що звукові кабелі теж оснащені роз'ємами RCA, їх хвильовий опір менше, що обмежує їх використання в такій якості.
• CD SPDIF. Цей роз'єм призначений для підключення накопичувача CD-ROM до звукової плати за допомогою інтерфейсу SPDIF.
• Вхід TAD. Роз’єм для підключення модемів з підтримкою автовідповідача (Telephone Answering Device) до звукової плати.
• Цифровий вихід DIN. Цей роз'єм призначений для підключення багатоканальних цифрових акустичних систем.
• Вхід Аuх. Забезпечує підключення до звукової карти інших джерел сигналу, наприклад телетюнера.
• Вхід I2S. Дозволяє підключати до звукової карти цифровий вихід зовнішніх джерел, наприклад DVD.
Додаткові роз'єми звичайно розташовуються безпосередньо на звуковій платі або під'єднуються до зовнішнього блоку або дочірньої плати. Наприклад, Sound Blaster Live! Platinum 5.1 є пристроєм, що складається з двох частин. Сам звуковий адаптер підключається в роз'єм PCI, а додаткові з'єднувачі під'єднуються до зовнішнього комутаційного блоку LiveDrive IR, який встановлюється в невживаний відсік дисковода.
На мал. 16.3 показаний звуковий адаптер Santa Cruz компанії Voyetra Turtle Beach, що містить внутрішні роз'єми, характерні для більшої частини сучасної 3D-звуковых плати.
Мал. 16.2. Звукова плата Sound Blaster Live! Platinum 5.1, що поставляється з комунікаційним блоком LiveDrive IR
128

Роз’єм для накопичувача CD-ROMУ деяких застарілих моделях звукової плати використовувався контроллер накопичувача CD-
ROM. Хоча інтегрований контроллер звукової плати і накопичувача CD-ROM може бути достатньо швидкодійним і полегшувати настройку засобів мультимедіа на старих комп'ютерах, але рекомендовано підключати дисковод компакт-дисків через стандартний інтерфейс EIDE або SCSI і уникати використання роз'єму для дисковода компакт-дисків на звуковій платі. Фактично всі нові комп'ютери сьогодні мають інтерфейс EIDE, а SCSI-адаптер дозволяє під'єднувати до одного і того ж інтерфейсу інші пристрої, наприклад накопичувачі на жорстких дисках, стрічкові накопичувачі і сканери. В цьому випадку значно легше знайти високоякісний програмний драйвер, що забезпечує високі експлуатаційні показники.
Драйвери звукової платиДля більшості плати передбачаються універсальні драйвери для DOS- і Windows-програм. У
операційних системах Windows 9x і Windows NT вже існують драйвери для більшості популярних звукових плат. Драйвери для інших плат можна придбати окремо. В більшості випадків драйвери створюються розробниками плати, а розповсюджуються компанією Microsoft.
Програми DOS звичайно не мають широкого вибору драйверів, але більшість ігор і інших програм підтримує адаптери Sound Blaster. Якщо купити адаптер, сумісний з платою Sound Blaster, то не повинно бути ніяких утруднень з вибором відповідного драйвера практично для всіх програм.Мінімальні вимоги, що пред'являються до звукової плати
Заміна колишнього аудіоадаптера Sound Blaster Pro стандарту ISA звуковою платою PCI дозволило значно поліпшити робочі характеристики системи, проте для повноцінної участі в комп'ютерних баталіях вам слід звернути увагу на наступні можливості звукової плати.
• Підтримка тривимірного звуку, реализована в наборі мікросхем. Вираз "тривимірний звук" означає, що звуки, відповідні тому, що відбувається на екрані, лунають далі або ближче, за спиною або десь осторонь. Microsoft DirectX 8.0 включає підтримку тривимірного звуку, проте для цього краще використовувати аудіоадаптер з апаратно-вбудованою підтримкою тривимірного звуку. DirectX 8.0 може використовуватися разом з іншими API тривимірного звуку, до яких відносяться, наприклад, ЕАХ компанії Creative, 3D Positional Audio компанії Sensaura і технологія A3D нині не існуючої компанії Aureal.
• 3D-звукове прискорення. Звукова плата з наборами мікросхем, підтримуючими цю можливість, має достатньо низький коефіцієнт завантаження процесора, що приводить до загального збільшення швидкості ігор. Для отримання якнайкращих результатів скористайтеся наборами мікросхем, що підтримують прискорення найбільшого числа 3D-потоков; інакше при обробці тривимірного звуку центральний процесор може зіткнутися з певними труднощами, що кінець кінцем позначиться на швидкості гри.
• Ігрові порти, що підтримують ігрові контроллери з силовим зворотним зв'язком. Якщо комп'ютерні ігри недостатньо коректно працюють з контроллерами USB або ж ігрові контроллери з силовим зворотним зв'язком використовують тільки сам ігровий порт, перевірте його настройки.
Не турбуйтеся про те, що перераховані можливості можуть влетіти вам в копієчку. Сьогодні існує безліч звукових плат середнього рівня, підтримуючих, як мінімум, дві з перерахованих функцій. Нові набори мікросхем тривимірного звуку, що поставляються різними виробниками, дозволяють любителям комп'ютерних ЗD-ігор модернізувати систему відповідно до своїх побажань.
Стиснення аудіоданихІснує дві основні області, в яких використовується стиснення звукових даних:• використання звукових фрагментів на Web-вузлах;• зменшення об'єму високоякісних музичних файлів.Спеціальні програми редагування звукових файлів, наприклад RealProducer компанії Real або
Microsoft Windows Media Encoder 7, дозволяють зменшувати об'єм звукових фрагментів при мінімальній втраті якості, що необхідне для їх використання в глобальній мережі.
129

Найпопулярніший формат звукових файлів — .mp3. Якість цих файлів наближається до якості компакт-диска, за розміром вони набагато менше звичних файлів .wav. Порівняйте самі: п'ятихвилинний звуковий файл формату .wav з якістю компакт-диска має розмір близько 50 Мбайт, тоді як такий же звуковий файл формату .mp3 — близько 4 Мбайт.
Єдиним недоліком файлів .mp3 є відсутність захисту від несанкціонованого використання, тобто будь-який охочий може вільно завантажити такий файл з Internet (благо Web-вузлів, що пропонують ці "піратські" записи, існує велика кількість). Описуваний формат файлів, не дивлячись на свої недоліки, набув досить широкого поширення, і його можна сміливо назвати наступним кроком після компакт-дисків в світі звукозапису. Багато фірм вже приступили до випуску програвачів файлів .mp3.
Файли MIDIДругий тип аудіофайла— файл MIDI, який настільки ж відрізняється від .wav, як векторний
малюнок від растру. Файли MIDI мають розширення .mid або .rmi і є повністю цифровими, містять не запис звуку, а команди, використовувані аудіоустаткуванням для його створення. Подібно тому як по командах відеоадаптери створюють зображення тривимірних об'єктів, звукова плата MIDI використовує файли MIDI, щоб синтезувати музику.
MIDI — могутня мова програмування, яка набула поширення в 80-ті роки і була розроблена спеціально для електронних музичних інструментів. Стандарт MIDI став новим словом у області електронної музики. За допомогою MIDI можна створювати, записувати, редагувати і відтворювати музичні файли на персональному комп'ютері або на MIDI-сумісному електронному музичному інструменті, підключеному до комп'ютера.
Файли MIDI, на відміну від інших типів звукових файлів, вимагають відносно невеликого об'єму дискового простору. Для запису години стереомузики, що зберігається у форматі MIDI, потрібно менше 500 Кбайт. У багатьох іграх використовується запис звуків у форматі MIDI, а не записі дискретизованого аналогового сигналу.
Файл MIDI — фактично цифрове представлення музичної партитури. Воно складене з декількох виділених каналів, кожний з яких представляє різний музичний документ або тип звуку. У кожному каналі визначаються частоти і тривалість звучання нот, які будуть програні інструментом точно так, як і нотний запис. Таким чином, файл MIDI для струнного квартету містить чотири канали, які представляють дві скрипки, альт і віолончель.Файли MIDI не призначені для заміни звукових файлів типу .wav. Найбільший дефект технології MIDI — можливість відтворювати тільки ті звуки, які передбачені в синтезаторі. Найочевидніший недолік полягає у тому, що за допомогою файлів MIDI не можна створити голоси (якщо не брати до уваги ефект хору, передбачений в синтезаторах).
Всі три специфікації МРС, а також РС9х:, передбачають підтримку MIDI у всіх звукових платах. Стандарт General MIDI, підтримуваний більшістю звукових плат, передбачає до 16 каналів в єдиному файлі MIDI, але це не обов'язково обмежує вас 16 інструментами. Один канал може представляти звук групи інструментів; таким чином, можна синтезувати повний оркестр.
Оскільки файл MIDI складається з цифрових команд, його редагувати набагато легше, ніж звуковий файл типу .wav. Відповідне програмне забезпечення дозволяє вибирати будь-який канал MIDI, записувати ноти, а також додавати різні ефекти.
Деякі пакети програм можуть навіть виробляти запис музики у файлі MIDI, використовуючи стандартну музичну систему позначень. Композитор може записати музику безпосередньо на комп'ютері, відредагувати її при необхідності, а потім роздрукувати ноти для виконавців. Це дуже зручно для професійних музикантів, які вимушені витрачати багато часу на переписування нот.
Загальні принципи функціонування RAIDОсновні задачі, які дозволяють розв’яти RAID, це забезпечення відмовостійкості дискової системи і підвищення її продуктивності.
Відмовостійкість досягається тим, що вводиться надмірність. У RAID об'єднується більше дисків, ніж це необхідно для отримання необхідної місткості.
130

Продуктивність дискової системи підвищується за рахунок того, що сучасні інтерфейси (зокрема, SCSI) дозволяють здійснювати операції запису і прочитування фактично одночасно з декількома дисками. Тому в першому наближенні можна розраховувати, що швидкість запису або читання, у разі застосування RAID, збільшується пропорційно кількості дисків, об'єднуваних в RAID.
Можливість одночасної роботи з декількома дисками можна реалізувати двома способами: з використанням паралельного доступу (parallel-access array) і з використанням незалежного доступу (independent-access array).
Для організації паралельного доступу робочий простір дисків розмічається на зони певного розміру (блоки) для розміщення даних і надлишкової інформації. Інформація, що підлягає запису на диски (запит на обслуговування), розбивається на такі ж по величині блоки, і кожен блок записується на окремий диск. Під час вступу запиту на читання, необхідна інформація збирається з декількох блоків.
Зрозуміло, що в цьому випадку швидкість запису (рівно як і швидкість читання) збільшується пропорційно кількості дисків, об'єднаних в RAID.
Для організації незалежного доступу робочий простір дисків також розмічається на зони певного розміру (блоки). Проте, на відміну від попереднього випадку, кожен запит на запис або читання обслуговується тільки одним диском.
Природно, в цьому випадку швидкість запису буде не вищою, ніж при роботі з одним диском. Проте масив з незалежним доступом в кожен момент часу може обслуговувати одночасно декілька запитів, кожен диск обслуговує свій запит.
Таким чином, обидва архітектурні рішення сприяють підвищенню продуктивності, але механізм підвищення продуктивності у цих рішень різний. Відповідно, властивості RAID істотно залежать від того, який з цих двох механізмів в ньому використовується. Саме тому при порівнянні RAID різного рівня в першу чергу необхідно порівнювати розмір логічних блоків. Точніше кажучи, не власне розмір, а співвідношення розміру блоку і величини запиту на обслуговування (об'єм інформації, належному запису або прочитуванню).
Іншим чинником, що впливає на продуктивність, є спосіб розміщення надлишкової інформації. Надлишкова інформація може зберігатися на спеціально виділеному для цього диску і може розподілятися по всіх дисках.
І, нарешті, в RAID різних рівнів застосовуються різні способи обчислення надлишкової інформації. Це також впливає на характеристики RAID (надійність, в першу чергу, продуктивність і вартість). Основні способи: повне дублювання інформації, застосування кодів з корекцією помилок (застосовується код з корекцією одиночних помилок і виявленням подвійних помилок ECC – код Хеммінга) і обчислення парності (Parity).Архітектура основних рівнів RAIDТепер давайте розглянемо архітектуру основних рівнів (basic levels) RAID детальніше. Перед розглядом приймемо деякі допущення. Для демонстрації принципів побудови RAID систем розглянемо набір з N дисків (для спрощення N вважатимемо парним числом), кожний з яких складається з M блоків.
131
Дані позначатимемо - Dm,n, де m - число блоків даних, n - число підблоків, на які розбивається блок даних D.
Диски можуть підключатися як до одного, так і до декількох каналів передачі даних. Використовування більшої кількості каналів збільшує пропускну спроможність системи.
RAID 0. Дисковий масив без відмовостійкості (Striped Disk Array without Fault Tolerance)Є дисковим масивом, в якому дані розбиваються на блоки, і кожним блоком записуються (або ж прочитується) на окремий диск. Таким чином, можна здійснювати декілька операцій вводу-виводу одночасно.
Переваги:
щонайвища продуктивність для програм вимагаючих інтенсивної обробки запитів вводу-виводу і даних великого об'єму; простота реалізації; низька вартість на одиницю об'єму.
Недоліки:
не відмовостійке рішення; відмова одного диска спричиняє за собою втрату всіх даних масиву.
RAID 1. Дисковий масив з дублюванням або дзеркало (mirroring)Дзеркалювання - традиційний спосіб для підвищення надійності дискового масиву невеликого об'єму. У простому варіанті використовується два диски, на які записується однакова інформація, і у разі відмови одного з них залишається його дубль, який продовжує працювати в колишньому режимі.
132
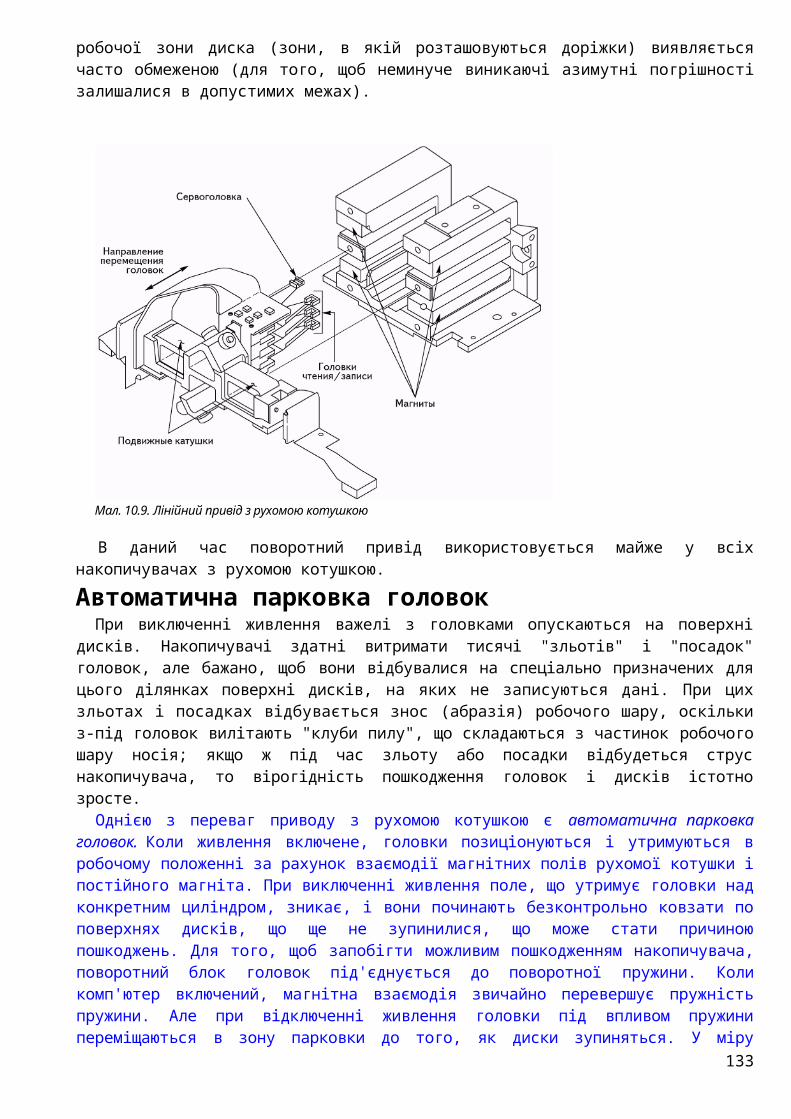
Переваги:
простота реалізації; простота відновлення масиву у разі відмови (копіювання); достатньо висока швидкодія для програм з великою інтенсивністю запитів.
Недоліки:
висока вартість на одиницю об'єму - 100% надмірність; невисока швидкість передачі даних.
RAID 2. Відмовостійкий дисковий масив з використанням коду Хеммінга (Hamming Code ECC).Надмірне кодування, яке використовується в RAID 2, носить назву коду Хеммінга. Код Хеммінга дозволяє виправляти одиночні і знаходити подвійні несправності. Сьогодні активно використовується в технології кодування даних в оперативній пам'яті типа ECC. І кодуванні даних на магнітних дисках.
В даному випадку показаний приклад з фіксованою кількістю дисків у зв'язку з громіздкістю опису (слово даних складається з 4-х біт, відповідно ECC код з 3-х).
Переваги:
швидка корекція помилок ("на льоту"); дуже висока швидкість передачі даних великих об'ємів; при збільшенні кількості дисків, накладні витрати зменшуються; достатньо проста реалізація.
Недоліки:
висока вартість при малій кількості дисків; низька швидкість обробки запитів (не підходить для систем орієнтованих на обробку транзакцій).
133

RAID 3. Відмовостійкий масив з паралельною передачею даних і парністю (Parallel Transfer Disks with Parity)Дані розбиваються на підблоки на рівні байт і записуються одночасно на всі диски масиву окрім одного, який використовується для парності. Використовування RAID 3 вирішує проблему великої надмірності в RAID 2. Більшість контрольних дисків, використовуваних в RAID рівня 2, потрібна для визначення положення несправного розряду. Але в цьому немає потреби, оскільки більшість контроллерів в змозі визначити, коли диск відмовив за допомогою спеціальних сигналів, або додаткового кодування інформації, записаної на диск і використовуваної для виправлення випадкових збоїв.
Переваги:
дуже висока швидкість передачі даних; відмова диска мало впливає на швидкість роботи масиву; малі накладні витрати для реалізації надмірності.
Недоліки:
непроста реалізація; низька продуктивність при великій інтенсивності запитів даних невеликого об'єму.
RAID 4. Відмовостійкий масив незалежних дисків з диском парності, що розділяється (Independent Data disks with shared Parity disk)Дані розбиваються на блоковому рівні. Кожен блок даних записується на окремий диск і може бути прочитаний окремо. Парність для групи блоків генерується при записі і перевіряється при читанні. RAID рівня 4 підвищує продуктивність передачі невеликих об'ємів даних за рахунок паралелізму, даючи можливість виконувати більше одного звертання по вводу/виводу одночасно. Головна відмінність між RAID 3 і 4 полягає у тому, що в останньому, розшарування даних виконується на рівні секторів, а не на рівні бітів або байтів.
Переваги:
дуже висока швидкість читання даних великих об'ємів; 134
висока продуктивність при великій інтенсивності запитів читання даних; малі накладні витрати для реалізації надмірності.
Недоліки:
достатньо складна реалізація; дуже низька продуктивність при записі даних; складне відновлення даних; низька швидкість читання даних малого об'єму при одиничних запитах; асиметричність швидкодії щодо читання і запису.
RAID 5. Відмовостійкий масив незалежних дисків з розподіленою парністю (Independent Data disks with distributed parity blocks)Цей рівень схожий на RAID 4, але на відміну від попереднього парність розподіляється циклічно по всіх дисках масиву. Ця зміна дозволяє збільшити продуктивність запису невеликих об'ємів даних в багатозадачних системах. Якщо операції запису спланувати належним чином, то, можливо, паралельно обробляти до N/2 блоків, де N - число дисків в групі.
Переваги:
висока швидкість запису даних; достатньо висока швидкість читання даних; висока продуктивність при великій інтенсивності запитів читання/запису даних; малі накладні витрати для реалізації надмірності.
Недоліки:
швидкість читання даних нижча, ніж в RAID 4; низька швидкість читання/запису даних малого об'єму при одиничних запитах; достатньо складна реалізація; складне відновлення даних.
RAID 6. Відмовостійкий масив незалежних дисків з двома незалежними розподіленими схемами парності (Independent Data disks with two independent distributed parity schemes)Дані розбиваються на блоковому рівні, аналогічно RAID 5, але на додаток до попередньої архітектури використовується друга схема для підвищення відмовостійкості. Ця архітектура є стійкою до подвійних відмов. Проте при виконанні логічного запису реально відбувається шість звернень до диска, що сильно збільшує час обробки одного запиту.
135

Переваги:
висока відмовостійкість; достатньо висока швидкість обробки запитів; відносно малі накладні витрати для реалізації надмірності.
Недоліки:
дуже складна реалізація; складне відновлення даних; дуже низька швидкість запису даних.
Сучасні RAID контроллери дозволяють комбінувати різні рівні RAID. Таким чином, можна реалізувати системи, які об'єднують в собі достоїнства різних рівнів, а також системи з великою кількістю дисків. Звично це комбінація нульового рівня (stripping) і якого або відмовостійкого рівня.
RAID 10. Відмовостійкий масив з дублюванням і паралельною обробкоюЦя архітектура виявляє собою масив типа RAID 0, сегментами якого є масиви RAID 1. Він об'єднує в собі дуже високу відмовостійкість і продуктивність.
Переваги:
висока відмовостійкість; висока продуктивність.
Недоліки:
дуже висока вартість; обмежене масштабування.
136

RAID 30. Відмовостійкий масив з паралельною передачею даних і підвищеною продуктивністю.Є масивом типа RAID 0, сегментами якого є масиви RAID 3. Він об'єднує в собі відмовостійкість і високу продуктивність. Звичайно використовується для програм вимагаючих послідовної передачі даних великих об'ємів.
Переваги:
висока відмовостійкість; висока продуктивність.
Недоліки:
висока вартість; обмежене масштабування.
RAID 50. Відмовостійкий масив з розподіленою парністю і підвищеною продуктивністюВиявляє собою масив типа RAID 0, сегментами якого є масиви RAID 5. Він об'єднує в собі відмовостійкість і високу продуктивність для програм з великою інтенсивністю запитів і високу швидкість передачі даних.
Переваги:
висока відмовостійкість; висока швидкість передачі даних; висока швидкість обробки запитів.
Недоліки:
висока вартість; обмежене масштабування.
137

RAID 7. Відмовостійкий масив, оптимізований для підвищення продуктивності. (Optimized Asynchrony for High I/O Rates as well as High Data Transfer Rates). RAID 7® є зареєстрованою торговою маркою Storage Computer Corporation (SCC)Для розуміння архітектури RAID 7 розглянемо її особливості:
1. Всі запити на передачу даних обробляються асихронно і незалежно. 2. Всі операції читання/запису кешируются через високошвидкісну шину x-bus. 3. Диск парності може бути розміщений на будь-якому каналі. 4. У мікропроцесорі контроллера масиву використовується операційна система реального часу орієнтована на обробку процесів. 5. Система має хорошу масштабованість: до 12-ти host-інтерфейсів, і до 48-ми дисків. 6. Операційна система контролює комунікаційні канали. 7. Використовуються стандартні SCSI диски, шини, материнські плати і модулі пам'яті. 8. Використовується високошвидкісна шина X-bus для роботи з внутрішньою кеш пам'яттю. 9. Процедура генерації парності інтегрована в кеш. 10. Диски, приєднані до системи, можуть бути задекларіровани як що окремо стоять. 11. Для управління і моніторингу системи можна використовувати SNMP агент.
Переваги:
висока швидкість передачі даних і висока швидкість обробки запитів (1.5 - 6 разів вище за інші стандартні рівні RAID); висока масштабованість хост інтерфейсів; швидкість запису даних збільшується із збільшенням кількості дисків в масиві; для обчислення парності немає необхідності в додатковій передачі даних.
Недоліки:
власність одного виробника; дуже висока вартість на одиницю об'єму; короткий гарантійний термін; не може обслуговуватися користувачем; потрібно використовувати блок безперебійного живлення для запобігання втраті даних з кеш пам'яті.
Розглянемо тепер стандартні рівні разом для порівняння їх характеристик. Порівняння виробляється в рамках архітектури, згаданої в таблиці.
RAIDМінімумдисків
Потребав дисках
ВідмовостійкістьШвидкістьпередачі даних
Інтенсивністьобробкизапитів
Практичневикористання
0 2 N < 1 диск < RAID 3дуже високадо N х 1 диск
Графіка, відео
1 2 2N* < RAID 6R > 1 дискW = 1 диск
до 2 х 1 дискW = 1 диск
малі файл-сервери
2 7 2N<X<N+1 < RAID 1 ~ RAID 3 Низька мейнфрейми
3 3 N+1 < RAID 1 < RAID 7 Низька Графіка, відео
4 3 N+1 < RAID 1R < RAID 3W < RAID 5
R = RAID 0W << 1 диск
файл-сервери
5 3 N+1 < RAID 1R < RAID 4W < RAID 3
R = RAID 0W < 1 диск
сервери баз даних
6 4 N+2 найвища низькаR > 1 дискW < RAID 4
використовується украй рідко
7 12 N+1 < RAID 1 найвища найвища різні типи програм
138

Лекція №2Історичні аспекти розвитку комп’ютерних систем
1. Механічні комп’ютери2. Комп’ютери на основі електронних ламп3. Комп’ютери, що базуються на транзисторах4. Комп’ютери на основі інтегральних схем5. Покоління надвелеких інтегральних схем
1. Механічні комп’ютери
Першою людиною, що створила рахункову машину, був французький учений Блез Паскаль (1623-1662), на честь якого названа одна з мов програмування.
Рахункова машина була створена в 1642 році і була механічною: з шестернями і ручним приводом. Рахункова машина Паскаля могла виконувати тільки операції додавання і віднімання.
Через тридцять років німецький математик Лейбніц (1646-1716) побудував іншу механічну машину, яка окрім додавання і віднімання могла виконувати операції множення і ділення. По суті, Лейбніц три століття назад створив подібність кишенькового калькулятора з чотирма функціями.
Ще через 150 років професор математики Кембріджського університету Чарльз Беббідж (1792-1871), винахідник спідометра, розробив і сконструював різницеву машину. Ця механічна машина, яка, як і машина Паскаля, могла тільки додавати і віднімати, формувала таблиці чисел для морської навігації. У машину був закладений тільки один алгоритм - метод кінцевих різниць з використанням поліномів. У цієї машини був досить цікавий спосіб виведення інформації : результати видавлювалися сталевим штампом на мідній дощечці, що передбачило пізніші засоби введення-виводу - перфокарти і компакт-диски.
Згодом Беббідж розробив аналітичну машину у якої було 4 компоненти: пристрій (пам'ять), що запам'ятовує, обчислювальний пристрій, пристрій введення (для прочитування перфокарт), пристрій виводу (перфоратор і друкуючий пристрій). Пам'ять складалася з 1000 слів по 50 десяткових розрядів, кожне з яких містило змінні і результати. Обчислювальний пристрій приймав операнди з пам'яті, потім виконував операції складання, віднімання, множення або ділення і повертало отриманий результат назад в пам'ять. Як і різницева машина, цей пристрій був механічним.
Перевага аналітичної машини полягала в тому, що вона могла виконувати різні завдання. Вона прочитувала команди з перфокарт і виконувала їх. Деякі команди наказували машині узяти 2 числа з пам'яті, перенести їх в обчислювальний пристрій, провести над ними операцію (наприклад, скласти) і відправити результат назад в пристрій, що запам'ятовує. Інші команди перевіряли число, а іноді здійснювали операцію переходу залежно від того, додатнє воно чи від’ємне. Якщо в пристрій зчитування вводилися перфокарти з іншою програмою, то машина виконувала інший набір операцій. А різницева машина могла здійснювати тільки один алгоритм.
Оскільки ця аналітична машина програмувалася на асемблері, їй було потрібне програмне забезпечення. Перше програмне забезпечення було створено Адою Ловлейс. Ада Ловлейс була першим у світі програмістом. У її честь названа сучасна мова програмування Ada.
У кінці 30-х років XX століття німець Конрад Зус сконструював декілька автоматичних рахункових машин з використанням електромагнітних реле. Трохи пізніше рахункові машини були сконструйовані в Америці. Машина Атанасова була надзвичайно розвиненою для того часу. У ній використовувалася бінарна арифметика і інформаційні місткості, які періодично оновлювалися, щоб уникнути знищення даних. Сучасна динамічна пам'ять (ОЗУ) працює точно за таким же принципом.
Робота над першим комп'ютером Айкена Mark I була закінчена в 1944 році. Комп'ютер містив 72 слова по 23 десяткові розряди кожне і міг виконувати будь-яку команду за 6 секунд. На пристроях вводу-виводу використовувалася перфострічка. На той час, як Айкен закінчив роботу над комп'ютером Mark II, релейні комп'ютери вже застаріли. Почалася ера електроніки.
139
2. Комп’ютери на основі електронних ламп
Стимулом до створення електронного комп'ютера стала Друга світова війна.На початку війни німецькі підводні човни руйнували британські кораблі. Німецькі адмірали посилали на підводні човни по радіо команди, а англійці могли перехоплювати ці команди. Проблема полягала в тому, що ці радіопослання були закодовані за допомогою приладу під назвою ENIGMA, попередник якого був спроектований винахідником і колишнім президентом США Томасом Джефферсоном.
На початку війни англійцям вдалося придбати ENIGMA у поляків, які, у свою чергу, вкрали його у німців. Проте щоб розшифрувати закодоване послання, вимагалася величезна кількість обчислень, і їх треба було провести відразу після того, як радіопослання було перехоплене. Тому британський уряд заснував секретну лабораторію для створення електронного комп'ютера під назвою COLOSSUS. COLOSSUS працював вже в 1943 році, але оскільки британський уряд повністю контролював цей проект і розглядав його як військову таємницю упродовж 30 років, COLOSSUS не міг служити основою подальшого розвитку комп'ютерів. Ми згадали його тільки тому, що це був перший у світі електронний цифровий комп'ютер.
Джон Моушлі, який був знайомий з роботами Атанасова і Стібітса, розумів, що армія зацікавлена в створенні механічних рахункових машин. Він зажадав від армії фінансування робіт із створення електронного комп'ютера. Вимога була задоволена в 1943 році, і Моушли зі своїм студентом, Дж. Преспером Экертом, почали конструювати електронний комп'ютер, який вони назвали ENIAC (Electronic Numerical Integrator and Computer - електронний цифровий інтегратор і калькулятор). Він складався з 18 000 електровакуумних ламп і 1500 реле. ENIAC важив 30 тонн і споживав 140 кіловат електроенергії. У машини було 20 регістрів, кожен з яких міг містити 10-розрядне десяткове число. У ENIAC було встановлено 6000 багатоканальних перемикачів і безліч кабелів було протягнуто до розеток.
Робота над машиною була закінчена в 1946 році, коли вона вже була не потрібна. Але оскільки війна закінчилася, Моушлі і Экерту дозволили організувати школу, де вони розповідали про свою роботу колегам-ученим. З цієї школи почався розвиток інтересу до створення великих цифрових комп'ютерів. Після появи школи і інші дослідники взялися за конструювання електронних обчислювальних машин. Першим робочим комп'ютером був EDS АС (1949 рік). Цю машину сконструював Моріс Уілкс в Кембріджському університеті. Далі JOHNIAC - в корпорації Rand, ILLIAC - в Університеті Ілінойса, MANIAC - в лабораторії Лос-Аламоса і WEIZAC - в Інституті Вайцмана в Ізраїлі.
Экерт і Моушлі незабаром почали роботу над машиною EDVAC (Electronic Discrete Variable Computer - електронна дискретна параметрична машина).
Тоді як Экерт і Моушлі працювали над машиною EDVAC, один з учасників проекту ENIAC, Джон фон Нейман сконструював свою власну версію EDVAC, машину IAS1. Фон Нейман усвідомив, що створення комп'ютерів з великою кількістю перемикачів і кабелів вимагає тривалого часу і дуже трудомістке. Він прийшов до думки, що програма має бути представлена в пам'яті комп'ютера в цифровій формі, разом з даними. Він також відмітив, що десяткова арифметика, використовувана в машині ENIAC, де кожен розряд представлявся 10 електронними лампами (1 включена і 9 вимкнені), має бути замінена бінарною арифметикою.
Основний проект, який він описав спочатку, відомий зараз як фон-нейманівска обчислювальна машина. Він був використаний в EDS АС, першій машині з програмою в пам'яті, і навіть зараз є основою більшості сучасних цифрових комп'ютерів. Цей задум і машина IAS зробили дуже великий вплив на подальший розвиток комп'ютерної техніки, тому варто коротко описати його. Схема архітектури цієї машини дана на мал. 1.4.
140

Рис. 1.1. – Схема обчислювальної машини фон-НейманаМашина фон Неймана складалася з п'яти основних частин: пам'яті, арифметико-логічного
пристрою, пристрою управління, а також пристроїв вводу-виводу. Пам'ять включала 4096 слів, кожне слово містило 40 бітів, біт - це 0 або 1. Кожне слово містило або 2 команди по 20 бітів, або ціле число зі знаком на 40 бітів. 8 бітів вказували на тип команди, а інші 12 бітів визначали одне з 4096 слів.
Усередині арифметико-логічного пристрою знаходився особливий внутрішній регістр в 40 бітів, так званий акумулятор. Типова команда додавала слово з пам'яті до акумулятора або зберігала вміст акумулятора в пам'яті. Ця машина не виконувала арифметичні операції з плаваючою точкою, оскільки фон Нейман розумів, що будь-який досвідчений математик був здатний тримати плаваючу кому в голові.
Приблизно в той же час, коли фон Нейман працював над машиною IAS, розроблявся комп'ютер Whirlwind I. На відміну від IAS, ENIАС і інших машин того ж типу із словами великої довжини, машина Whirlwind I містила слова по 16 бітів і була призначена для роботи в реальному часі.
Цей проект привів до винаходу пам'яті на магнітному сердечнику (винахідник Джей Форрестер), а потім і першого серійного міні-комп'ютера.
У той час IBM була маленькою компанією, що проводила перфокарти і механічні машини для їх сортування. Хоча фірма IBM частково фінансувала проект Айкена, вона не цікавилася комп'ютерами і тільки в 1953 році побудувала комп'ютер IBM - 701, через багато років після того, як компанія Экерта і Моушлі зі своїм комп'ютером UNIVAC стала номером один на комп'ютерному ринку.
У IBM - 701 було 2048 слів по 36 бітів, кожне слово містило дві команди. Він став першим комп'ютером, що лідирує на ринку протягом десяти років. Через три роки з'явився IBM - 704, у якого були 4 Кбайт пам'яті на магнітних сердечниках, команди по 36 бітів і процесор з плаваючою точкою. У 1958 році компанія IBM почала роботу над останнім комп'ютером на електронних лампах, IBM - 709, який по суті був ускладненою версією IBM - 704.
3. Друге покоління розвитку комп’ютерів
Транзистор був винайдений співробітниками лабораторії Bell Laboratories в 1950-х роках. Перший комп'ютер на транзисторах був побудований в лабораторії МТИ. Він містив слова з 16 бітів, як і Whirlwind I. Комп'ютер називався ТХ- 0 (Transistorized experimental computer 0 - експериментальна транзисторна обчислювальна машина 0) і призначався тільки для тестування машини ТХ- 2.
Машина ТХ- 2 не мала великого значення, але один з інженерів з цієї лабораторії, Кенет Ольсен, в 1957 році заснував компанію DEC (Digital Equipment Corporation - корпорація по виробництву цифрової апаратури), щоб реалізовувати серійну машину, схожу з ТХ- 0. Ця машина, PDP - 1, з'явилася тільки через чотири роки головним чином тому, що капіталісти, фінансуючі
141
DEC, вважали виробництво комп'ютерів невигідним. Тому компанія DEC продавала в основному невеликі електронні плати.
PDP - 1 з'явився в 1961 році. У нього були 4 Кбайт слів по 18 бітів і час циклу 5 мікросекунд. Цей параметр був в два рази менше, ніж у IBM - 7090, транзисторного аналога IBM - 709. PDP - 1 був найшвидшим комп'ютером у світі у той час. PDP - 1 коштував $120000, a IBM - 7090 коштував мільйони. Компанія DEC продала десятки комп'ютерів PDP - 1, і так з'явилася комп'ютерна промисловість.
Одну з перших машин моделі PDP - 1 віддали в МТІ, де вона відразу привернула увагу дослідників. Одним з нововведень PDP - 1 був дисплей з розміром 512 на 512 пікселів, на якому можна було малювати точки. Незабаром студенти МТІ склали спеціальну програму для PDP - 1, щоб грати у Війну світів - першу у світі комп'ютерну гру.
Через декілька років DEC розробив модель PDP - 8, 12-бітовий комп'ютер. PDP - 8 коштував набагато дешевше, ніж PDP - 1 ($16000). Головне нововведення - одна шина(рис. 1.2).
Шина - це набір паралельно сполучених дротів для зв'язку компонентів комп'ютера. Це нововведення сильно відрізняло PDP - 8 від IAS. Така структура відтоді стала використовуватися в усіх комп'ютерах. Компанія DEC продала 50000 комп'ютерів моделі PDP - 8 і стала лідером на ринку міні-комп'ютерів.
Рисунок 1.2 – Шина комп’ютера PDP-8Як вже було сказано, з винаходом транзисторів компанія IBM побудувала транзисторну
версію IBM - 709 - IBM - 7090, а пізніше - IBM - 7094. У неї час циклу складав 2 мікросекунди, а пам'ять складалася з 32 слів по 16 бітів.
IBM - 7090 і IBM - 7094 були останніми комп'ютерами типу ENIAC, але вони широко використовувалися для наукових розрахунків в 60-х роках минулого століття. Компанія IBM також випускала комп'ютери IBM - 1401 для комерційних розрахунків. Ця машина могла зчитувати і записувати магнітні стрічки і перфокарти і роздруковувати результат так само швидко, як і IBM - 7094, але при цьому коштувала дешевше. Для наукових обчислень вона не підходила, та зате була дуже зручна для ведення ділових записів.
У IBM - 1401 не було регістрів і фіксованої довжини слова. Пам'ять містила 4 Кбайт по 8 бітів (4 Кбайт). Кожен байт містив символ з 6 бітів, адміністративний біт і біт для вказівки кінця слова. У команди MOVE, наприклад, є початкова адреса і адреса пункту призначення. Ця команда переміщає байти з першої адреси в другу, поки біт кінця слова не набуде значення 1.
У 1964 році компанія CDC (Control Data Corporation) випустила машину 6600, яка працювала майже на порядок швидше, ніж IBM - 7094. Секрет такої високої швидкості роботи полягав в тому, що усередині ЦПУ (центрального процесора) знаходилася машина з високою мірою паралелізму.
У неї було декілька функціональних пристроїв для складання, множення і ділення, і усі вони могли працювати одночасно. Для того, щоб машина швидко працювала, треба було скласти хорошу програму, але доклавши деякі зусилля, можна було зробити так, щоб машина виконувала 10 команд одночасно.
Усередині машини 6600 було вбудовано декілька маленьких комп'ютерів. ЦПУ, таким чином, виконувала тільки підрахунок чисел, а інші функції (управління роботою машини, а також введення і виведення інформації) виконували маленькі комп'ютери. Деякі принципи пристрою 6600 використовуються і в сучасних комп'ютерах.
Слід згадати ще один комп'ютер - Burroughs B5000. Розробники машин PDP - 1, ІВМ- 7094 і CDC - 6600 займалися тільки апаратним забезпеченням, прагнучи понизити його вартість (DEC)
142
або змусити працювати швидше (IBM і CDC). Програмне забезпечення не мінялося. Виробники В5000 пішли іншим шляхом. Вони розробили машину з наміром програмувати її на мові Algol 60 (попереднику мови Pascal), сконструювавши апаратне забезпечення так, щоб спростити завдання компілятора. Так з'явилася ідея, що програмне забезпечення також треба враховувати при розробці комп'ютера. Але незабаром ця ідея була забута.
4. Комп’ютери на базі інтегральних схем
Винахід кремнієвої інтегральної схеми в 1958 році (винахідник - Роберт Нойс) дав можливість поміщати десятки транзисторів на одну невелику мікросхему. Комп'ютери на інтегральних схемах були меншого розміру, працювали швидше і коштували дешевше, ніж їх попередники на транзисторах. Нижче описані найбільш відомі з них.
До 1964 року компанія IBM лідирувала на комп'ютерному ринку, але існувала одна велика проблема: комп'ютери IBM - 7094 і IBM - 1401, які вона випускала, були несумісні один з одним. Один з них призначався для складних розрахунків, в ньому використовувалася двійкова арифметика на регістрах по 36 бітів, а в другому використовувалася десяткова система числення і слова різної довжини. У багатьох покупців були обидва комп'ютери, і їм не подобалося, що вони абсолютно несумісні.
Коли прийшов час замінити ці дві серії комп'ютерів, компанія IBM зробила рішучий крок. Вона випустила серію комп'ютерів на транзисторах, System/360, які були призначені і для наукових, і для комерційних розрахунків. System/360 містила багато нововведень. Це було ціле сімейство комп'ютерів з однією і тією ж мовою (асемблером). Кожна нова модель була більше за розміром і по потужності, чим попередня. Компанія могла замінити IBM - 1401 на IBM - 360 (модель 30), a IBM - 7094 - на IBM - 360 (модель 75). Модель 75 була більше за розміром, працювала швидше і коштувала дорожче, але програми, написані для однієї з них, могли використовуватися для іншої. На практиці програми, написані для маленької моделі, виконувалися великою моделлю без особливих утруднень. Але у разі перенесення програмного забезпечення з великої машини на маленьку могло не вистачити пам'яті. Та все ж створення такої серії комп'ютерів було великим досягненням. Ідея створення сімейств комп'ютерів незабаром стала дуже популярною, і протягом декількох років більшість комп'ютерних компаній випустили цілі серії схожих машин з різною вартістю і функціями.
Ще одне нововведення в IBM - 360 - мультипрограмування. У пам'яті комп'ютера могло знаходитися одночасно декілька програм, і доки одна програма чекала, коли закінчиться процес введення-виводу, інша виконувалася. IBM - 360 була першою машиною, яка могла повністю імітувати роботу інших комп'ютерів. Маленькі моделі могли імітувати IBM - 1401, а великі - IBM - 7094, тому програмісти могли залишати свої старі програми без змін і використовувати їх в роботі з IBM - 360. Деякі моделі IBM - 360 виконували програми, написані для IBM, - 1401, набагато швидше, ніж сама IBM - 1401, тому не було ніякого сенсу в переробленні програм.
Комп'ютери серії IBM - 360 могли імітувати роботу інших комп'ютерів, тому що вони створювалися з використанням мікропрограмування. Треба було усього лише написати три мікропрограми: одну - для системи команд IBM - 360, іншу - для системи команд IBM - 1401 і третю - для системи команд IBM - 7094. Вимога сумісності була однією з головних причин використання мікропрограмування.
IMB - 360 вдалося вирішити дилему між двійковою і десятковою системою: у цього комп'ютера було 16 регістрів по 32 біта для бінарної арифметики, але пам'ять складалася з байтів, як у IBM - 1401. У ній використовувалися такі ж команди для переміщення записів різного розміру з однієї частини пам'яті в іншу, як і в IBM - 1401.
Об'єм пам'яті у IBM - 360 складав 224 байти (16 Мбайт). В ті часи такий об'єм пам'яті здавався величезним. Серія IBM - 360 пізніше змінилася серією IBM - 370, потім IBM - 4300, IBM - 3080, IBM - 3090. У усіх цих комп'ютерів була схожа архітектура. До середини 80-х років 16 Мбайт пам'яті стало недостатньо, і компанії IBM довелося частково відмовитися від сумісності, щоб перейти на систему адрес в 32 біта, необхідну для пам'яті об'ємом в 20 байтів.
Можна було б припустити, що оскільки у машин були слова в 32 біта і регістри, у них цілком могли б бути і адреси в 32 біта. Але у той час ніхто не міг навіть уявити собі комп'ютер з об'ємом пам'яті 16 Мбайт.
143

5. Покоління надвеликих інтегральних схем
Поява надвеликих інтегральних схем (СБИС) в 80-х роках дозволила поміщати на одну плату спочатку десятки тисяч, потім сотні тисяч і, нарешті, мільйони транзисторів. Це привело до створення комп'ютерів меншого розміру і з вищою швидкістю роботи. До появи PDP - 1 комп'ютери були настільки великі і дорогі, що компаніям і університетам доводилося мати спеціальні відділи (обчислювальні центри). До 80-х років ціни впали так сильно, що можливість придбавати комп'ютери з'явилася не лише у організацій, але і у окремих людей. Почалася ера персональних комп'ютерів.
Персональні комп'ютери використовувалися зовсім для інших цілей. Вони застосовувалися для обробки слів, а також для різних діалогових прикладних програм, з якими великі комп'ютери не могли працювати. Перші персональні комп'ютери продавалися у вигляді комплектів. Кожен комплект містив друковану плату, набір інтегральних схем, що зазвичай включає схему Intel 8080, декілька кабелів, блок живлення й іноді 8-дюймовий дисковод. Скласти з цих частин комп'ютер покупець повинен був сам. Програмне забезпечення до комп'ютера не додавалося. Покупцеві доводилося самому писати програмне забезпечення. Пізніше з'явилася операційна система СРМ, написана Гару Кілдалом для Intel 8080. Ця діюча операційна система поміщалася на дискету, вона включала систему управління файлами і інтерпретатор для виконання призначених для користувача команд, які набиралися з клавіатури.
Ще один персональний комп'ютер, Apple (а пізніше і Apple II), був розроблений Стівом Джобсом і Стівом Возняком. Він став надзвичайно популярний серед окремих покупців, а також широко використовувався в школах, і це зробило компанію Apple серйозним конкурентом IBM.
Эстридж узяв Intel 8088 як центральний процесор і створив персональний комп'ютер з серійних компонентів. Цей комп'ютер (IBM PC) з'явився в 1981 році і став найбільш популярним комп'ютером.
Але компанія IBM зробила одну річ, про яку вона пізніше пошкодувала. Замістьтого щоб тримати проект машини в секреті, як вона зазвичай робила, компанія
опублікувала повні проекти, включаючи усі електронні схеми, в книзі вартістю $49. Ця книга була опублікована для того, щоб інші компанії могли проводити змінні плати для IBM PC, що підвищило б сумісність і популярність цього комп'ютера.
Перша версія IBM PC була оснащена операційною системою MS - DOS, яку випускала тоді ще крихітна корпорація Microsoft. IBM і Microsoft спільно розробили ту, що послідувала за MS - DOS операційну систему OS/2, характерною рисою якої був графічний інтерфейс, схожий з інтерфейсом Apple Macintosh. Тим часом компанія Microsoft також розробила власну операційну систему Windows, яка працювала на основі MS - DOS, на випадок, якщо OS/2 не матиме попиту. OS/2 дійсно не мала попиту, a Microsoft успішно продовжувала випускати операційну систему Windows, що послужило причиною грандіозного розбрату між IBM і Microsoft.
В середині 80-х років на зміну CISC прийшов RISC. Команди RISC були простіше і працювали набагато швидше. У 90-х роках з'явилися суперскалярні процесори, які могли виконувати багато команд одночасно, часто не в тому порядку, в якому вони з'являються в програмі.
144
Related Documents











