静静静静 静静静静 静静静静静静 静静静静静静静 静静静静静静静静 -V

控制科学与工程 研究生基础理论课- V
Jan 18, 2016
控制科学与工程 研究生基础理论课- V. 状态反馈与输出反馈 义. SISO 态反馈系统的极点配置法. 状态重构问题. 状态观测器的极 点配置. 带观测器状态反馈闭环系统. 降维状态观测器 的设计. § 1. § 2. § 3. § 4. § 5. § 6. 第五章 状态反馈与状态观测器. 主要内容:. 状态反馈与输出反馈. § 1. 1 — 2两种反馈形式讨论. 1) 两种反馈引入后 , 所得闭环系统和原开环系统具有相同的阶数. 2 ) 两种反馈闭环系统均能保持原系统的能控性; - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

静思笃行 持中秉正
秋记与你分享
控制科学与工程 研究生基础理论课 -V

第五章 状态反馈与状态观测器
主要内容:
状态反馈与输出反馈义
§11 SISO 态反馈系统的极点配置法
§22 状态重构问题
§33
状态观测器的极 点配置
§44
带观测器状态反馈闭环系统
§55
降维状态观测器 的设计
§66

2) 两种反馈闭环系统均能保持原系统的能控性 ; 状态反馈后的闭环系统不一定保持原系统的能观性 ; 输出反馈后的闭环系统一定保持原系统的能观性 .
1—2 两种反馈形式讨论
1) 两种反馈引入后 , 所得闭环系统和原开环系统具有相同的阶数 .
状态反馈与输出反馈 状态反馈与输出反馈§1

3) 状态反馈的实现需要系统状态的信息 , 当系统的状态不能直接得到时 , 需要构造观测器 ( 估计器 ) 来对其进行估计 .
4) 状态反馈与输出反馈相比 , 具有更好的特性 .
1—2 两种反馈形式讨论
状态反馈与输出反馈 状态反馈与输出反馈§1

DvCxy
BvAxx
Kxuv
对其施加状态反馈律
设受控系统模型为
1) 状态反馈
5—1 :状态反馈与输出反馈表达式1—1 状态反馈与输出反馈表达式
§1 状态反馈与输出反馈 状态反馈与输出反馈§1

DuxDKCy
BuxBKAx
BBKAsICsWK1
则闭环系统的状态空间模型为
闭环传递函数为
状态反馈与输出反馈 状态反馈与输出反馈§1
(5-1)

DuxDHCCy
BuxBHCAx
BBHCAsICsWH1
则闭环系统的状态空间模型为
闭环传递函数为
对两种反馈形式的讨论
状态反馈与输出反馈 状态反馈与输出反馈§1
(5-2)

2—1 极点配置法
A-BK
K
DuxDKCy
BuxBKAx
所谓极点配置法 , 就是通过状态反馈阵的选取 , 使以上闭环系统的极点 , 即特征值恰好处于所希望的一组极点的位置上 .
采用上节的状态反馈律 , 所得闭环系统为
SISO 状态反馈系统的极点配置 SISO 状态反馈系统的极点配置§2
(5-3)

该定理即 : SISO 系统可通过状态反馈任意配置极点的充要条件为该受控系统是状态完全能控的 .
注1
对状态完全能控的 SISO 系统 ,
引入状态反馈可以任意配置极点 ,
但不改变原系统的零点
对于 n 维 SISO 受控系统 , 利用状态反馈配置极点时 , 可以调节的参数有 n 个 , 但利用基本型的输出反馈配置极点时 , 可供调节的参数只有一个 .
注2
SISO 状态反馈系统的极点配置 SISO 状态反馈系统的极点配置§2

KK
2—2 极点配置法的算法
SISO 状态反馈系统的极点配置 SISO 状态反馈系统的极点配置§2
● 判断系统能控性。如果状态完全能控,按下列步骤继续。
●求状态反馈后闭环系统的特征多项式:
●根据给定(或求得)的期望闭环极点,写出期望特征多项式。
●由 确定反馈矩阵 K :
)](det[)( BKAIf
* 11 2 1 1 0( ) ) ) ) n n
n nf ( ( (
)()( * ff ][ 21 nkkkK
1) 当 时 , 采用能控规范型法3n
即先将原系统化为能控规范型 , 然后在此基础上配置极点 .

KK
1—2
2—2 极点配置法的算法
2) 当 时 , 采用特征值不变性原理方法。
不通过能控规范型求状态反馈阵 K ,而直接利用下面的方程求反馈阵
3n
SISO 状态反馈系统的极点配置 SISO 状态反馈系统的极点配置§2
n
iisssfBKAsI
1
*det
解关于 K 的方程
(5-4)

x
x~x
3—1 状态观测器的基本思想:
1) 状态观测器的基本思想 状态重构的可能性
所谓状态重构 ( 估计 ) 问题 , 即能否用系统的可量测参量( 输出和输入 ) 来重新构造一个状态 , 使之在一定的指标下和系统的真实状态等价 . 当线性定常系统的状态完全能观测时 , 利用其输出和输入重构出其真实状态 X 是可能的 .
状态重构问题 状态重构问题§3

定理 1: 对于状态完全能观测的线性定常系统 , 其观测器总是 存在的 .
定理 1 只是状态观测器存在的充分条件 , 而非必要条件
引理 : 任一线性定常系统经过非奇异线性变换总能化为如下的 能观结构形式 .
状态观测器的存在性
状态重构问题 状态重构问题§3

1111 C,B,A
uB
B
X
X
AA
A
X
X
2
1
2
1
2221
11
2
1 0
2
1
1 0X
XCy
1X 2X
状态重构问题 状态重构问题§3
式中 , 为能观测状态 ; 为不能观测状态 ;
为系统的能观测部分 ( 子系统 ).
定理 2: 线性定常系统的状态观测器存在的充要条件是 : 其不能观 测的部分是渐进稳定的 .
(5-5)

0~lim
txtxt
实现状态重构的一个直观想法就是人为地构造另一个动态系统 ,
以原系统的输入和输出作为它的输入量 , 而它的状态就作为原系统状态的重构状态 , 使之在渐进的的意义上等价 . 即
3—2 状态重构的等价性指标
状态重构问题 状态重构问题§3
(5-6)

0~lim
txtxt
3—3 状态观测器的定义
状态重构问题 状态重构问题§3
定义 : 设线性定常系统∑ 0 的状态 是不能直接量测的 , 如果另 一个动态系统 以∑ 0 的输入和输出作为它的输入量 , 的输 出满足如下的等价性指标
则称动态系统为∑ 0 的状态观测器 .
x CBA ,,

tG tvtBtxtAtx
txtCty
设原系统的状态空间模型为
3—4 状态观测器的结构模型
状态重构问题 状态重构问题§3

tG txtCtGtvtBtxtCtGtAtx ~~
则所构造的状态观测器的结构形式为
设计状态观测器 , 实际上是设计上式中的
3—4 状态观测器的结构模型
状态重构问题 状态重构问题§3
tG
(5-7)

4—1 状态观测器的极点配置
状态观测器的极点配置 状态观测器的极点配置§4
对 SISO 线性定常系统∑ 0 , 其观测器∑ 可以任意配置极点 , 即具有任意逼近速度的充要条件为系统∑ 0 状态完全能观测。该定理是线性状态反馈系统∑ K 。
CBA ,,
CBBKA ,,
CBA ,,
GBGCA ,,
定理 :

CBA ,, xTx ˆ
设 为能观规范型特征多项式的系数
是期望特征多项式的系数 , 得反馈阵
极点配置定理的对偶形式 , 证明类似 . 该定理构造性
证明给出的状态观测器设计算法如下 :
先将原系统∑ 0 通过状态变换 化为能观规范型 .
状态观测器的极点配置 状态观测器的极点配置§4
niai ,,2,1 niai ,,2,10

4— 2 状态观测器的极点配置
1) 当 时 , 采用能观规范型方法 .
即先将原系统化为能观规范型 , 然后在此基础上配置极点 .
3n
状态观测器的极点配置 状态观测器的极点配置§4

GTG ˆ
101
10
1
0
1
1
ˆ
ˆ
ˆ
ˆ
aa
aa
aa
g
g
g
G nn
nn
n
n
则所求的观测器系数矩阵为
状态观测器的极点配置 状态观测器的极点配置§4
(5-8)
(5-9)

3n
sf 0
n
iisssfGCAsI
1
0det
式中 , 为观测器系统希望极点组成的特征多项式 .
2) 当 时 , 采用特征值不变性原理方法 .
此时 , 不通过能观规范型求状态反馈阵 , 而直接利用下面的方程求反馈阵 , 即
状态观测器的极点配置 状态观测器的极点配置§4
(5-10)
G
G

n
BvAxtx Cxty
GyBvxGCAx ~~
且该系统状态完全能控能观 , 当其状态不能直接量测时 , 需要构造以下形式的观测器
设原 n 阶系统的状态方程和输出方程为
5—1 闭环系统的等价性
带观测器状态反馈闭环系统 带观测器状态反馈闭环系统§5
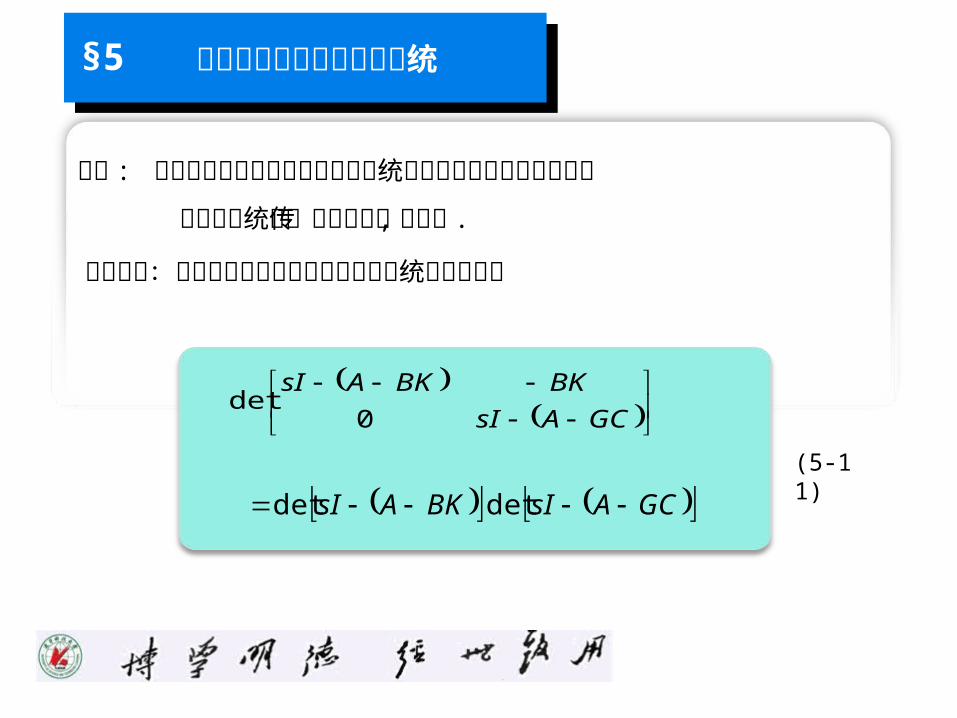
(5-11)

xKuv ~
因此 , 带有观测器的状态反馈闭环系统的阶数为 2n.
该闭环系统 (复合系统 ) 可表示为 :
此时的状态反馈作用为
带观测器状态反馈闭环系统 带观测器状态反馈闭环系统§5
uB
xx
x
GCA
BKBKA
xx
x
0~0~
xx
xCy ~0

结论 : 带状态观测器的状态反馈闭环系统中 , 状态反馈的确定和观
测器的确定可相互独立进行 .
带观测器状态反馈闭环系统 带观测器状态反馈闭环系统§5
GCAsI
BKBKAsI
0det
GCAsIBKAsI detdet
分离原理:带状态观测器的状态反馈闭环系统特征多项式
结论 : 带状态观测器的状态反馈闭环系统和不带状态观测器的状态反 馈闭环系统的传递函数相同 , 即等价 .
带观测器状态反馈闭环系统 带观测器状态反馈闭环系统§5
(5-11)

n
降维观测器的设计 降维观测器的设计§6
当原 维系统的 个状态中有 个可直接量测或通过输出的线性变 换可得到 , 则只需为剩下的 个状态设计 维的状态观测器 ,
这样的状态观测器称为降阶观测器 .
当状态观测器的维数与原系统的维数相同 , 即要把原系统的
个状态都估计出来 , 这样的观测器称为全维 ( 阶 ) 观测器
n n l
ln ln

lCrank )( l
vBxAx xCy nlRC
nnRC
PQ
若 , 即有 个状态可量测或通过线性变换得到 . 则可构造非奇异矩阵
6—1 分离出 n-l 个需要估计的状态变量设计观测器
显然 , 变换后的系统中 , 可量测 , 只需对 设计观测器即可 .2x 1x
降维观测器的设计 降维观测器的设计§6
(5-12)

;1120 vByAv 121222 xAvByAyz
vByAxAx 1121111
2222121 xvByAxAy
以上经线性变换后的状态方程可化为
令 :
6—2 降维观测器的结构
降维观测器的设计 降维观测器的设计§6

1x
01111 vxAx
121xAz
则可得以 为状态向量的 维子系统的
状态空间模型 :
ln
针对该子系统设计状态观测器即可 .
降维观测器的设计 降维观测器的设计§6

Gyxw 1~ yGxw 1
~
GzvxGAAx 0121111
~~
vByAyGvByAxGAAx 222112121111~~
即 :
令 :
6—3 降维观测器的空间表达式
降维观测器的设计 降维观测器的设计§6

,211 GBBK
221221112 GAAGGAAK
vGBBwGAAw 212111
yGAAGGAA 22122111
则可推出 :
令 :
6—3 降维观测器的空间表达式
降维观测器的设计 降维观测器的设计§6
(5-13)

Gywx 1~
ln
yKvKwGAAw 212111
则前面的降维观测器可化为
降维观测器的设计 降维观测器的设计§6
该观测器称为 维龙伯格观测器 .
(5-14)
(5-15)

xQx 1 xQx
2
1
x
xx ,1
lnRx ,2lRx .2 yx
BvAxx
Cxy
引入非奇异线性变换
则可得变换后的系统
其中
,
降维观测器的设计 降维观测器的设计§6
或

6—4 原系统状态估计
xQx ~~ 1
则原系统的状态估值为
y
Gyw
y
xx 1
~~
原系统的状态估计变换后的系统的状态估值为
降维观测器的设计 降维观测器的设计§6

5.状态空间的线性变换5.状态空间的线性变换5.状态空间的线性变换5.状态空间的线性变换本章小结
状态反馈和状态观测器
状态反馈和极点配置
状态反馈和输出反馈状态反馈极点配置条件和算法状态反馈闭环系统的能控能观性
系统的镇定问题
系统镇定的概念状态反馈和系统的镇定
状态观测器
状态观测器的原理和构成状态观测器的存在条件状态观测器的设计原则状态观测器的配置条件和算法
带有状态观测器的状态反馈系统
带有状态观测器的状态反馈系统的构成
带有状态观测器的状态反馈系统的输入输出特性
Related Documents











