手手 LBS 手手 手手手手 指指指指:指指指 961337 指指指 971415 指指指

手機 LBS 導覽 室內導航
Jan 01, 2016
指導教授: 姚修慎 961337 鍾明翰 971415 吳宗昇. 手機 LBS 導覽 室內導航. 研究緣起. 當我們到達一間百貨公司、博物館或是機場時,我們常會因為建築物的巨大而迷失了自己,浪費許多時間在找尋目標上。 如果,這時我們擁有能夠掌握自己所在地,並且能動態指引自己的工具,想必會節省不少時間,並且更輕鬆愉快的結束旅程。. 研究緣起. 大部分的大型建築雖然會提供導航,但都僅僅是告示、指標與櫃檯,無法提供針對個人的詳細指引。 而大部分人都會攜帶,且能夠動態更新使用者位置的工具就是 手機 ,所以手機是進行於室內提供 LBS 最好的工具。. LBS 起源與發展. - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

手機 LBS導覽室內導航
指導教授:姚修慎
961337 鍾明翰971415 吳宗昇

研究緣起 當我們到達一間百貨公司、
博物館或是機場時,我們常會因為建築物的巨大而迷失了自己,浪費許多時間在找尋目標上。
如果,這時我們擁有能夠掌握自己所在地,並且能動態指引自己的工具,想必會節省不少時間,並且更輕鬆愉快的結束旅程。

研究緣起
大部分的大型建築雖然會提供導航,但都僅僅是告示、指標與櫃檯,無法提供針對個人的詳細指引。
而大部分人都會攜帶,且能夠動態更新使用者位置的工具就是手機,所以手機是進行於室內提供 LBS 最好的工具。

LBS 起源與發展 適地性服務 (Location-Based Services ; LBS) ,
是指基於行動定位技術,探知使用者所在位置,並提供使用者目前所在位置的相關服務。
而目前 LBS 更是在救難方面以外的方面發揚光大,特別是日常生活方面。最著名的例子就是 GPS 的導航系統,利用定位系統,指引使用者移動路徑,降低其迷路與塞車的機率。

研究平台
目前 iPhone 等新型擁有觸碰操作功能流行於世,這些新世代的手機(使用Android OS 、 Windows Phone 等),擁有以往手機無法想像的強大功能。
如同無線上網、電子羅盤、照相機等等都是能夠輔助室內 LBS 的硬體。

研究平台 同時,觸碰型普及率也
逐年攀身,正逐漸的取代以往的3G手機。
考量到研究的實用性與便利性,我們選擇了使用 Android OS 的手機做為我們的研究平台。

研究目標 研究課題 如果要於手機上進行室內
LBS 導覽的話,最重要的一點就是能夠得知使用者的所在地。
其次,就是清晰易懂的室內地圖與相關資訊。
由於 GPS 的電波會受到建築物的牆壁所阻擋,導致了於室內無法直接以GPS 進行定位。
我們必須另外尋找能夠於室內使用且便於手機進行定位的技術。

室內定位使用技術 目前室內定位技術主要有以下幾項
Wi-fi紅外線超音波BluetoothRFID (Radio Frequency IDentification 、無
線射頻辨識 )ZigBeeINS (Inertial Navigation System 、慣性導航
系統 )

室內定位技術比較成本 普及性 應用範圍 精確性 穩定度
Wi-Fi 中 高 極高 中 中
紅外線 中 中 低 中 低
超音波 中 低 低 中 低Bluetooth 低 極高 低 低 低
RFID 低 低 高 高 高ZigBee 中 極低 中 高 中
INS 低 中 低 極高 高 以上是各技術的比較,以普及性、精確性和穩定性來做為比較,我們選擇 Wi-Fi跟 INS 做為定位的技術。

定位方法與分區圖 將建築以樓層分割成數個 Layer ,
然後再將數個樓層分割成不同Block 。
各樓層入口使用 Blue-tooth 進行Check-in ,當使用者接近並感測到時,將定位位置改變於該區。
每個地區約為 20 平方公尺,將定位點設在各個 Block 的中心,以使用者所在的 Block來提供導航資訊。

Wi-fi 無線定位技術 –RSSI 定位
Wi-Fi 的電波訊號強度 (dBm)
會隨著距離增加而衰減,我們可以依據衰減的程度來判定與無線基地台 (AP) 的距離。
由於 Wi-Fi 網路都需有發訊的AP ,且依照協定,每個 AP
都有獨有的辨識碼,藉著這個規定可以區別收到的訊號來自於哪個 AP 。

Wi-fi 無線定位技術 –RSSI 定位
利用 dBm 的衰減程度,得知使用者與不同 AP 的距離,利用三角定位法運算出使用者的所在地。僅此定位方法,產生的誤差十分巨大,所以我們採用了更進一步的方法來提升準確率。 我們事先建立起各地點的訊號強度資料庫。 使用者現場定位時改以最近鄰居法與資料庫進行比對。
○ 我們取最近的 3 個鄰居平均後做為所在地
定位的誤差將會大幅降低,足以進行室內 LBS 導覽。

INS 定位
INS又稱慣性導航系統 (Inertial Navigation System ) ,現今已管廣泛運用於導彈、飛機等飛航產物上。
INS使用陀螺儀、電子羅盤、加速度計等感測器獲取數據,搭配計算機進行定位計算。
利用觸碰型手機內建的電子羅盤,可以知道使用者的移動方向與移動振幅,藉此完成 INS計步器來進行定位。
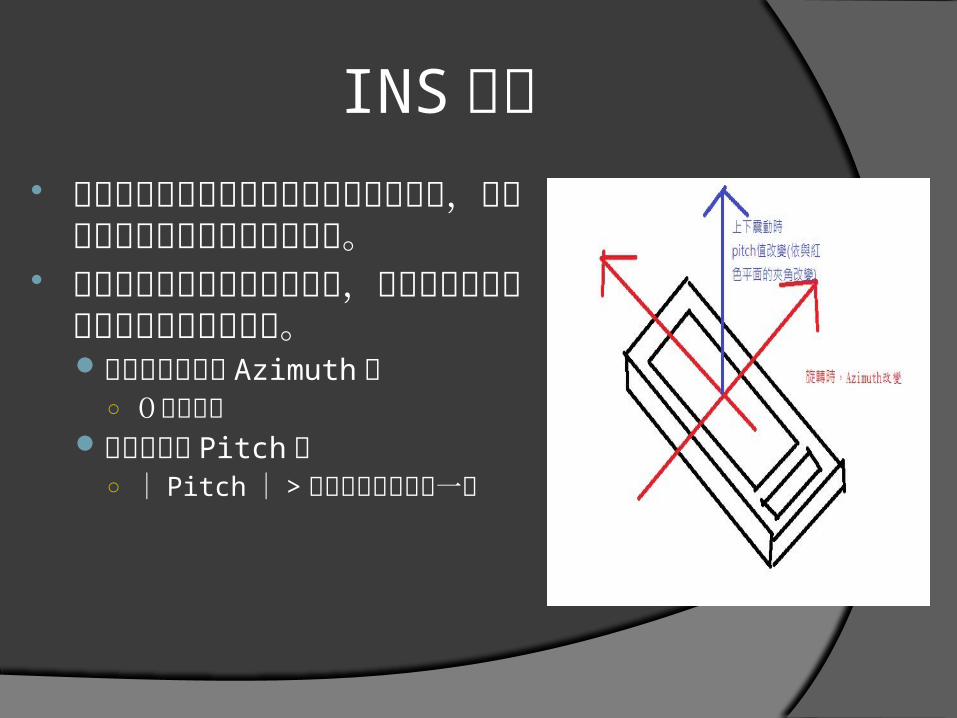
INS 定位 手機上的電子羅盤可以檢測與北方的夾角,同時也能夠偵測使用者移動的振幅。
我們夾角來判定使用者的方向,並且利用振福來判定使用者是否有前進。與北方的夾角為 Azimuth值
○ 0度為正北上下振幅為 Pitch值
○ | Pitch| > 定值時判定為行進一步
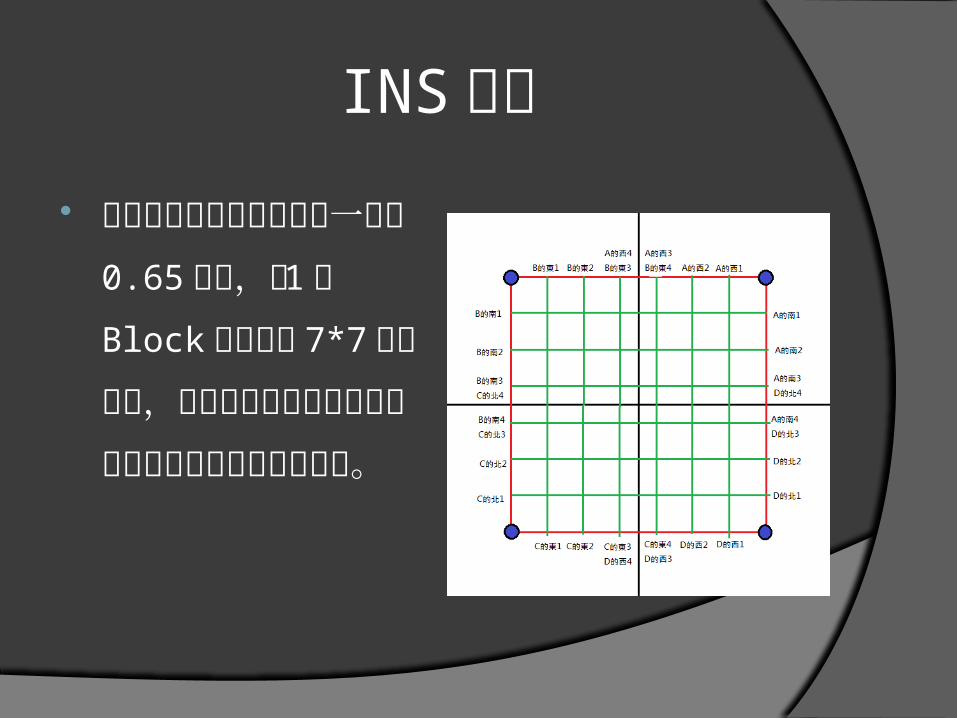
INS 定位 我們假設人類平常每
前進一步為 0.65 公尺,將 1 個 Block再分割成 7*7 的小方格,利用計步器所偵測到的步數與方向決定使用者所在地。

室內定位技術整合 由於 INS每行走就會增加一點誤差值,這一累積誤差當時間
一久將會成為巨大的差值,所以我們會定期以 RSSI將初始位置更新降低誤差。
將 INS 做為行進間定位的主體,以 RSSI 定位做為起始點判定與修正,這就是手機室內 LBS 的定位。
在以下情況啟用 RSSI
於程式開始 錯誤發生時 長時間行走時(這時將 INS 與 RSSI 結果平均做為所在地) 長時間靜止不動

系統架構圖
INS 定位RSSI 定位
室內導航
判斷程序
訊號資料庫 位置比對 電子羅盤 位置計算
目標搜尋 錯誤偵測
Check-in

程式啟動
設定目標 (非必要 )
INS啟動
判斷位置
到達目標並提供資訊
追蹤定位
程式結束
RSSI再定位
是否有下一個目標
重置數據與設定新目標
正確
錯誤
YES!
No!
RSSI 室內定位
相關流程圖

相關成果 -RSSI 藉由 Wi-Fi~RSSI 定位的結果,準確正確率為 75% 。
由實驗結果可知,在空曠的室內場地。運用 Wi-Fi 的無線訊號強度的定位法誤差值僅僅 2 公尺,正確率高達 7成 5 。雖然不甚完美,但已經是十分高的數字,如果搭配其他定位方法,在聯集下定位的正確率將會更高。
76%
19%
3%3%
誤差區數0 1 2 3

相關成果 - INS
精確度
實驗路徑
我們實踐運用 INS 的計步器定位成果,效果十分優良,能夠將誤差壓低在 2公尺內。
短距離 10 公尺的誤差約為 0.1 公尺
長距離 90 公尺的誤差約為 0.44 公尺

專題結果 將 RSSI 與 INS兩項定
位技術整合後,短時間內的定位誤差低於 3 公尺以下,讓使用者能夠正確德知自己所在。
我們依據使用者的所在,搭配資料庫。能夠讓使用者找到想要的商品以及想到達的目標,算是完成了手機 LBS 導覽的一小步。
Related Documents











