橋梁・トンネル点検用 打音検査飛行ロボットシステムの研究開発 2017年10月19日 日本電気株式会社 未来都市づくり推進本部 西沢 俊広 本研究の一部は、内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント 技術」(管理法人:NEDO)によって実施しています。 共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所 インフラ・イノベーション研究会第38回研究会

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

橋梁・トンネル点検用打音検査飛行ロボットシステムの研究開発
2017年10月19日
日本電気株式会社
未来都市づくり推進本部
西沢 俊広
本研究の一部は、内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所
インフラ・イノベーション研究会第38回研究会

2 © NEC Corporation 2017
橋梁・トンネル等のインフラの老朽化
▐ 高度経済成長期に整備された設備が建設後50年を経過、更新時期を迎える
平成22年度 平成32年度 平成42年度
道路橋 約8% 約26% 約53%
排水機場、水門等 約23% 約37% 約60%
下水管 約2% 約7% 約19%
港湾岸壁 約5% 約25% 約53%
厳しい財政・経済状況の中、 “予防保全”の考え方が重要
(出典)国土交通白書
●道路橋などインフラ設備の状況を定期的に点検・診断
●致命的欠陥になる前に速やかに対策
建設後50年以上経過したインフラの割合

3 © NEC Corporation 2017
▐ インフラの保守・点検作業には熟練技術が必要 定期的に目視、触手、打音、測定、探傷検査など実施
交通状況や塩害環境なども関連付けて損傷や異常を診断
▐ 団塊世代高齢化と共に熟練技術者の若手層における割合減少
▐ 技能の伝承や安全教育において問題が顕在化
熟練技術者不足が深刻化
(出典)中部産業活性化センター 「団塊世代の技術・技能活用による製造業の活性化調査研究報告書」
ICT技術を活用した、作業の効率化や熟練技術の「見える化」が必要
技能伝承が危惧されている職種 技能伝承が危惧されている部門

4 © NEC Corporation 2017
ICTを活用した点検/診断による予防保全
▌点検作業
高所など足場が必要な点検作業を効率化
足場設置コストを削減
▌点検調書作成
現場で点検調書を容易に編集・閲覧可能に
変状個所の立体的な位置関係を容易に確認
▌点検調書管理
作成した点検調書を電子納品しデータベース化
道路管理者と点検事業者、現場作業員の情報共有を効率化
打音検査飛行ロボット
近接目視点検支援打音点検支援
ポール打検機
点検調書作成・閲覧用タブレット
複数画像合成による全体確認用画像生成 公共インフラ
アセットマネジメントシステム点検対象構造物
3Dモデル生成
ドローンやポール打検機による点検作業、調書作成、調書管理など各フェーズでのソリューションを提供

5 © NEC Corporation 2017
打音検査飛行ロボットの運用手順
<遠望目視及び非破壊検査>遠望目視等により損傷の見られる箇
所を抽出する。
<近接目視による打音箇所確認>打音検査飛行ロボット近接目視支援用機体
<打音点検>低い箇所(~6m):ポール打検機高い箇所(6m~):打音検査飛行ロボット
打音点検支援用機体
<点検調書作成>点検調書作成・閲覧用タブレット点検対象構造物3Dモデル生成
<点検調書管理>データ管理システム

6 © NEC Corporation 2017
NECが取り組む打音検査飛行ロボットの研究内容
ロボット操作員(左)と点検員(右)
ポール打検機打音検査飛行ロボット
・ 高所の打音点検作業を支援するドローン、ポール打検機開発・ ロボット操作員が点検個所にロボットを誘導・ 点検員が打音を聴音、清音・濁音を判別し、点検調書を作成
○打音点検の研究ターゲット
(1)ノイズ下で人が清音・濁音を判別できる音を提供するセンサ開発(2)清音・濁音の自動判別に向けた技術課題の抽出
打検機
本研究の一部は内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所

7 © NEC Corporation 2017
打音検査飛行ロボット-システム構成と運用イメージ
トータルステーション飛行ロボットと点検箇所が見通せる場所に設置レーザで飛行ロボットの位置を計測
点検員端末に接続したヘッドフォンで清音・濁音の判別をして点検結果を記録
ロボット操作員点検員の指示に従いロボットを操縦
点検端末
接続箱 発電機
打音検査飛行ロボット
操縦端末
橋梁
橋脚
安全確保員飛行ロボットの安全を確認非常時にプロポを利用して安全に着陸させる
有線給電①電源供給②データ通信③飛行範囲制限
床版下面

8 © NEC Corporation 2017
打音検査飛行ロボットが有効な利用シーン
▌高さ30m程度までの高さの橋梁で、高所作業車などでアクセス困難な橋脚の側面。従来点検員がロープアクセスをするような危険作業が必要な場合。
▌歩道の幅が広く、橋梁点検車のムーブでは床版下面へのバケットのアクセスができない場合。例:岐阜県各務原大橋
▌地震などの災害後など橋梁の下で点検員が作業することが困難なケース。点検員が離れたところから打音検査飛行ロボットを操作し、橋梁の下の橋脚、橋桁、床版を点検。
▌赤外線カメラなどでスクリーニングされたうき・剥離の変状個所に対して、清音・濁音を判別し、叩き落としの必要性を判断。
岐阜県各務原大橋 地震で損壊した阿蘇長陽大橋

9 © NEC Corporation 2017
打音点検センサ部
①ボールローラ(3ヶ所)
②接触スイッチ(1ヶ所)
④振動センサ(ボールローラ背面)
※ボールローラ3点で壁面と接触
③ハンマー

10 © NEC Corporation 2017
点検対象(目標精度)と利用シーン
▌点検対象•高さ30mまでのコンクリート部材が対象。
•橋梁の橋脚、床版下面、橋桁などの打音検査が可能。
•飛行ロボットが運用可能な空間として、幅4m、高さ4mの空間が必要。
•打音検査により目ではわからないかぶり深さ2~3cm、10cm角以上のサイズのうき、はくり
▌運用者•操縦端末によりロボットを操縦するロボット操作員、ロボット操作員に点検箇所を指示し点検端末で打検機操作をして清音・濁音の判別し点検結果を記録する点検員、および飛行ロボット周囲の安全を確保する安全確保員の3名で運用します。3名で運搬、設置、運用が可能です。
▌導入の効果•足場の設置コスト(費用、時間)を縮減します。
•高所作業を不要にすることで点検員の安全を確保します。

11 © NEC Corporation 2017
試作した打音点検飛行ロボット
打音点検飛行ロボット/試作したロボット
逸脱防止用ネット展開システム・打音点検飛行ロボットを試作し、国土交通省主催の現場検証にて要素技術の部分的な機能を確認
・逸脱防止用ネットによる飛行試験の安全性確保
風を通しロボットをキャッチできる網点検現場で展開可能な構造開発
本研究の一部は内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所

12 © NEC Corporation 2017
打検機を押し当てる飛行制御
打音点検飛行ロボット/飛行制御技術
・非GPS環境での飛行を目標としたトータルステーションとLRF※による位置姿勢情報による自律制御飛行を実現。
・搭載した打検機を壁面に押し当て、点検員が清音・濁音の判断がつく品質の打音の発生を実現。
模擬変状を打音する様子
本研究の一部は内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所

13 © NEC Corporation 2017
打音点検飛行ロボット/風洞での性能評価
JAXA風洞での飛行性能評価
・JAXA風洞での飛行性能の評価により、風速8m/sの整流での飛行安定性の確認
6.5mx5.5mの大型風洞でのフリーフライト評価、風速(整流)3m/s~8m/sで安定性確認
本研究の一部は内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所

14 © NEC Corporation 2017
▌点検対象構造物の面に沿わせて近接目視点検用の画像を収集。
▌姿勢を安定させる制御機能を利用し2.5mの距離から画像を撮影。
▌ひび割れ幅0.2mmの分解能をもつ高精細画像撮影の確認。
搭載カメラで取得した高精細画像
本成果は、総合科学技術・イノベーション会議の戦略的イノベーション創造プログラム (SIP)「インフラ維持管理・更新・マネジメント技術」(管理法人:国立研究開発法人新エネルギー・産業技術総合開発機構[NEDO])の委託業務の結果得られたものです。
目視点検ドローン/撮影画像

15 © NEC Corporation 2017
ひび割れ検出画像
撮像した画像の解析結果
▌ 0.1mmのひび割れ検出のための撮影条件 壁面と機体の距離:1.5m 視野:約1.9x1.3m オーバラップ率
機体進行方向:60%、垂直方向:30% 機体移動速度:0.1m/s
撮影画像
全体確認用モザイク画像
高解像度画像
※開発中
※開発中
▌ドローンを壁面から一定距離を離して一定速度で飛行させながら画像を収集
▌複数写真をモザイク画像に合成し、全体確認用画像を生成、損傷図作成を支援
▌現場検証では2.5mの距離で撮影※ひび割れ幅0.2mmの分解能の画像を確認。
※開発中

16 © NEC Corporation 2017
ポール打検機/状況検知技術
・8m以下の高さで安価な打音点検支援を実現するため、 打音点検飛行ロボットと共通のセンサヘッドを用いたポール打検機を試作。
・国交省の現場検証において実用性を評価。従来の点検と同等の時間での作業性を確認。足場の構築時間、費用を縮減。
試作したポール打検機
センサヘッド
点検補助員点検員
点検補助員がタブレットを操作し点検結果を記録
点検端末
本研究の一部は内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所

17 © NEC Corporation 2017
健全
変状
Hz
音圧差dB
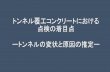
幸久橋 橋桁側面における変状個所と健全個所の周波数解析結果
変状個所は健全個所に比べて全体的に高い音圧となり、ピークが顕在化していないため濁っていることがわかる。
現場検証で収録した音声データを解析したところ、打音の品質にばらつきがあることが判明
→点検員はこの程度のばらつきがあっても清濁判別可能。実現場におけるデータ収集をし、清音・濁音判別性能の向上を目指す
打音データの解析結果
変状
健全
足場が必要な点検個所の打音をポール打検器を用いて収録
本研究の一部は内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所

18 © NEC Corporation 2017
<打音検査飛行ロボット>各務原大橋でのフィールド試験
▌実施概要
2017年4月11日(火)~12日(水)
現場実証場所 岐阜県各務原市各務原大橋
▌実施内容
橋脚と床版下面の打音検査を実施
うき・剥離といった損傷は見つからなかった
▌各務原大橋写真

19 © NEC Corporation 2017
<ポール打検機>美濃市下橋でのフィールド試験
▌実施概要
2017年2月22日
現場実証場所 岐阜県美濃市 下橋(高さ5m程度)
▌実施内容
ポール打検機のデモンストレーション
1橋脚間の橋脚、床板下面、橋桁側面・下面の打音点検の実施と点検調書作成。
▌評価結果
2年前に点検員が足場を組んで実施した点検結果と比較し、2年前に点検員の見落としのあった変状箇所をポール打検機が検出。
実際に高所作業車でポール打検機が検出した変状箇所の人手による打音点検を実施し、ポール打検機で人手と同等の打音を発生させることができることを確認。
ポール打検機で検出した変状箇所

20 © NEC Corporation 2017
点検調書例 2/2
ポール打検機と従来打音点検を比較した変状箇所

21 © NEC Corporation 2017
社会実装イメージ
ハンマーセンサヘッド
・従来の足場建設、または高所作業車や橋梁点検車が必要な高所の打音点検に本装置を活用
・従来の機械足場や点検装置と同じようにレンタルにより点検業者に提供
・点検データの管理、情報共有についてはクラウド型で情報サービスを提供
・SIP実装プロジェクトなどの現場検証に参加し、評価を反映した改良を経て、高速道路、国、地方自治体が管理する道路に展開さらに鉄道、ビル等の道路以外の点検に応用
開発中の機体、昨年度より40%小型化今後評価を実施し、現場での実証実験を計画
改良中の打音点検飛行ロボットシステム
本研究の一部は内閣府総合科学技術・イノベーション会議の「SIP インフラ維持管理・更新・マネジメント技術」(管理法人:NEDO)によって実施しています。共同実施者:自律制御システム研究所・首都高速道路技術センター・産業技術総合研究所

22 © NEC Corporation 2017
今後の計画
今後の計画
項 目 FY2016 FY2017 FY2018 FY2019 FY2020
開発
試行運用
社会実装
現場検証モデルリリース ▲
運用評価完了▲
事業判断量産開始▲ 社会実装
2017年度より各地で現場検証モデルを利用した試行運用を開始。現場での課題を改善し、2019年度から社会実装を目指す
試行運用による評価
現場の課題の改善

Related Documents