四四四四四四四四四 四四四四四四四四四 四四四四四 四四四四四 Team: OWL Team: OWL T19R019 T19R019 四四四四 四四四四

四足歩行ロボットの 製作と制御
Jan 20, 2016
四足歩行ロボットの 製作と制御. Team: OWL T19R019 園田雅人. 目的. 四足歩行ロボットを製作し、クロール歩容で歩行させる。. 脚の軌道. ④. ・3つの支持脚の動きと1つの遊脚の動きの4つの段階を踏んで動いていきます。. ③. ①. ②. 四つの脚の動き. 脚の動きは、それぞれずれてはじまります。これは、1つの脚が遊脚しているときに他の 3 つの脚は、接地し、支持脚の動きをしているためです。. 逆運動学. フローチャート. 脚の軌道座標. 逆運動学により関節角度算出. 1サイクルの計算が終了した?. NO. YES. - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

四足歩行ロボット四足歩行ロボットのの
製作と制御製作と制御Team: OWLTeam: OWL
T19R019T19R019
園田雅人園田雅人
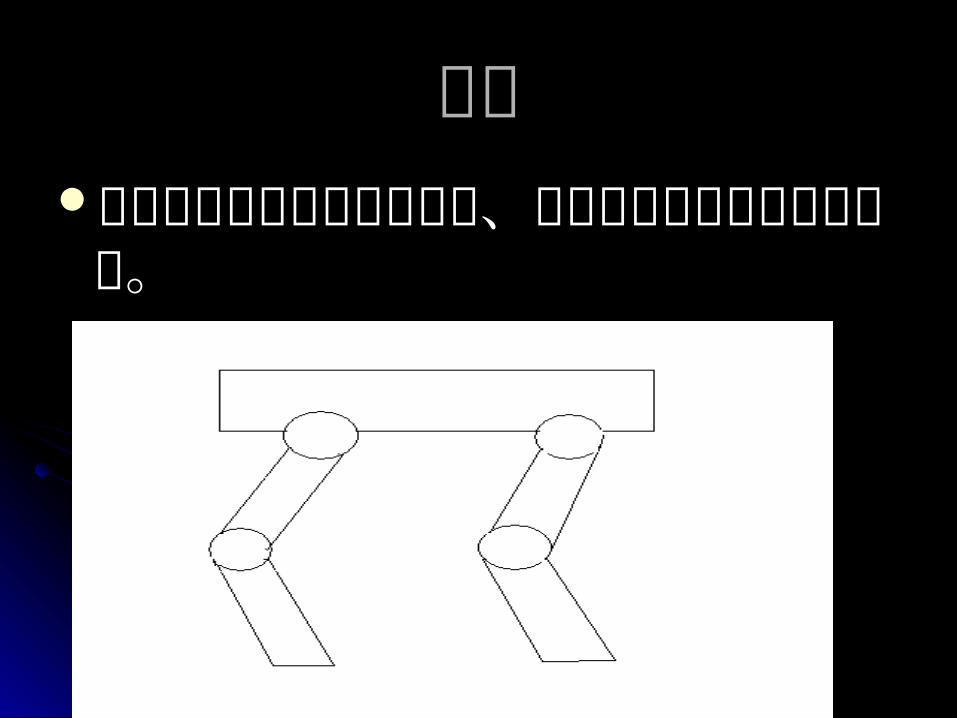
目的目的四足歩行ロボットを製作し、クロ四足歩行ロボットを製作し、クロール歩容で歩行させる。ール歩容で歩行させる。
脚の軌道脚の軌道
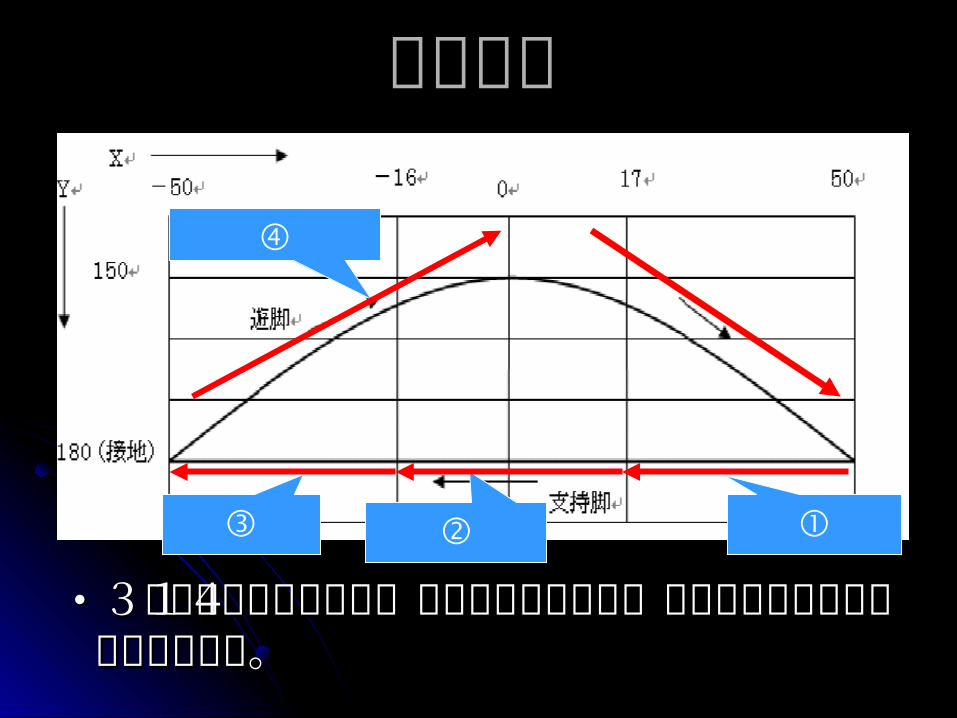
・3つの支持脚の動きと1つの遊脚の動き・3つの支持脚の動きと1つの遊脚の動きの4つの段階を踏んで動いていきます。の4つの段階を踏んで動いていきます。
①②③
④
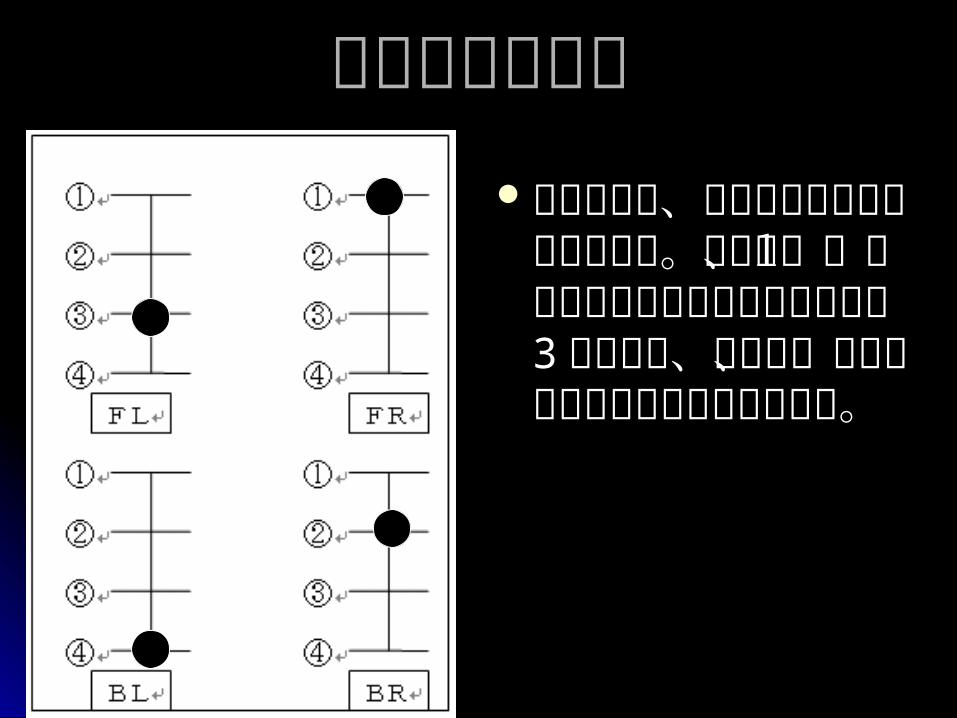
四つの脚の動き四つの脚の動き脚の動きは、それ脚の動きは、それぞれずれてはじまぞれずれてはじまります。これは、ります。これは、1つの脚が遊脚し1つの脚が遊脚しているときに他のているときに他の 33つの脚は、接地し、つの脚は、接地し、支持脚の動きをし支持脚の動きをしているためです。ているためです。
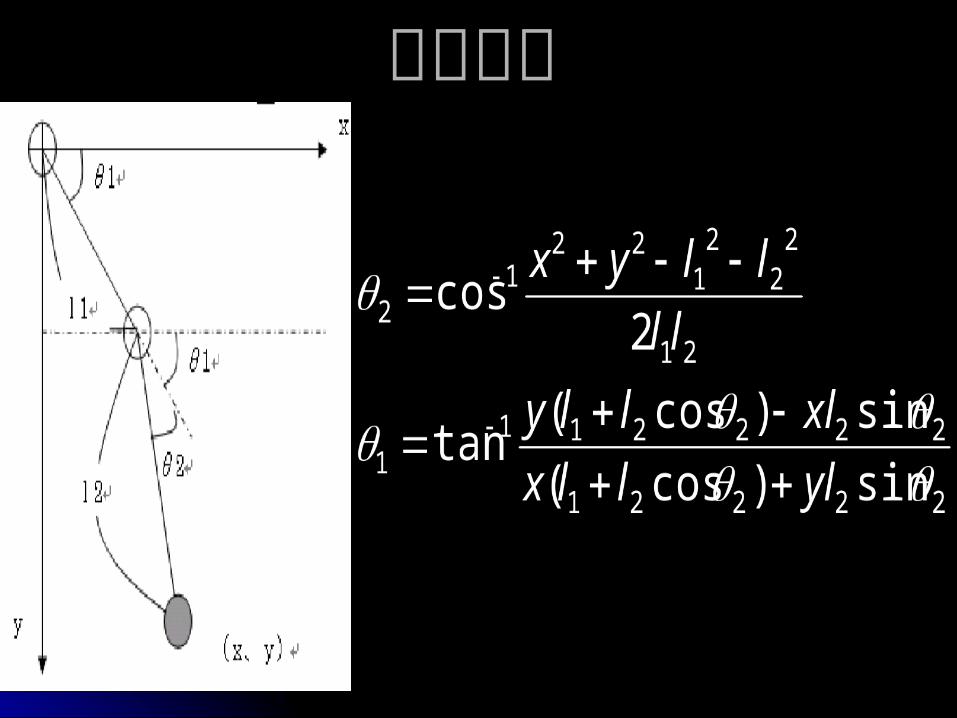
逆運動学逆運動学
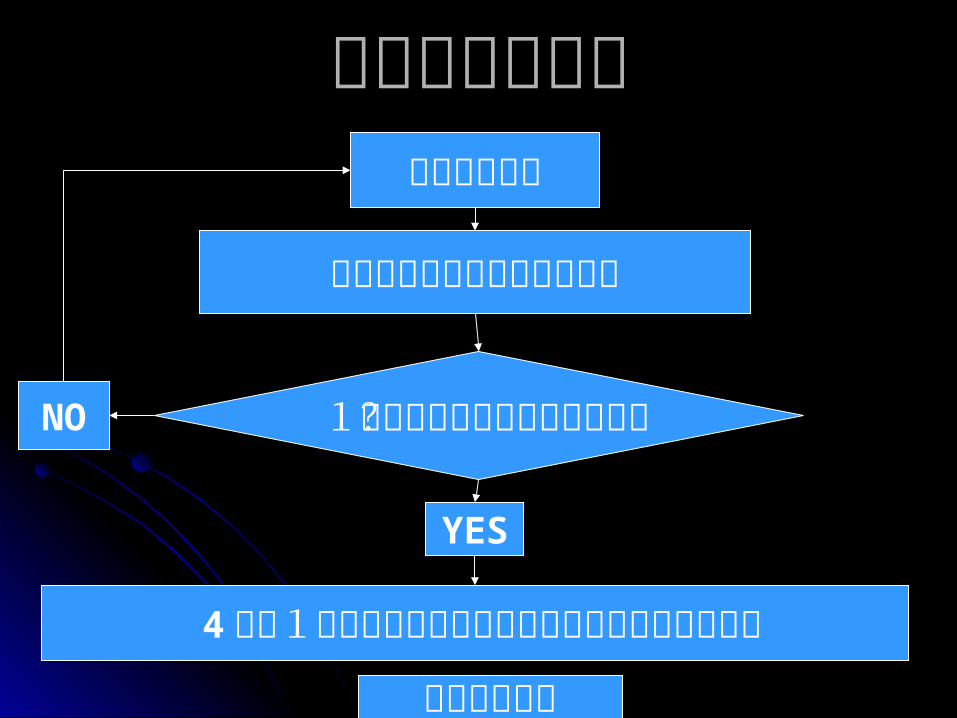
フローチャートフローチャート脚の軌道座標
逆運動学により関節角度算出
1サイクルの計算が終了した?NO
YES
4分の1サイクルずらした角度を各脚のサーボに送る
シミュレート
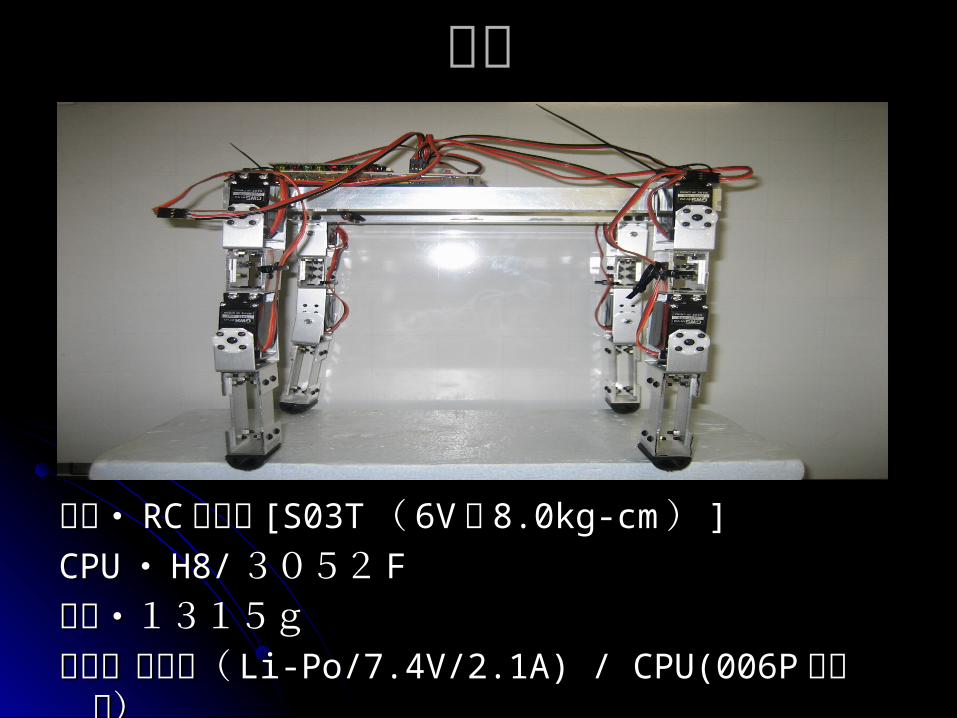
実演実演
関節・関節・ RCRCサーボサーボ [S03T[S03T(( 6V6V時時 8.0kg-cm8.0kg-cm)) ]]
CPUCPU・・ H8/H8/30523052 FF
重量・1315g重量・1315g電源・サーボ(電源・サーボ( Li-Po/7.4V/2.1A) / CPU(006PLi-Po/7.4V/2.1A) / CPU(006P角電池)角電池)
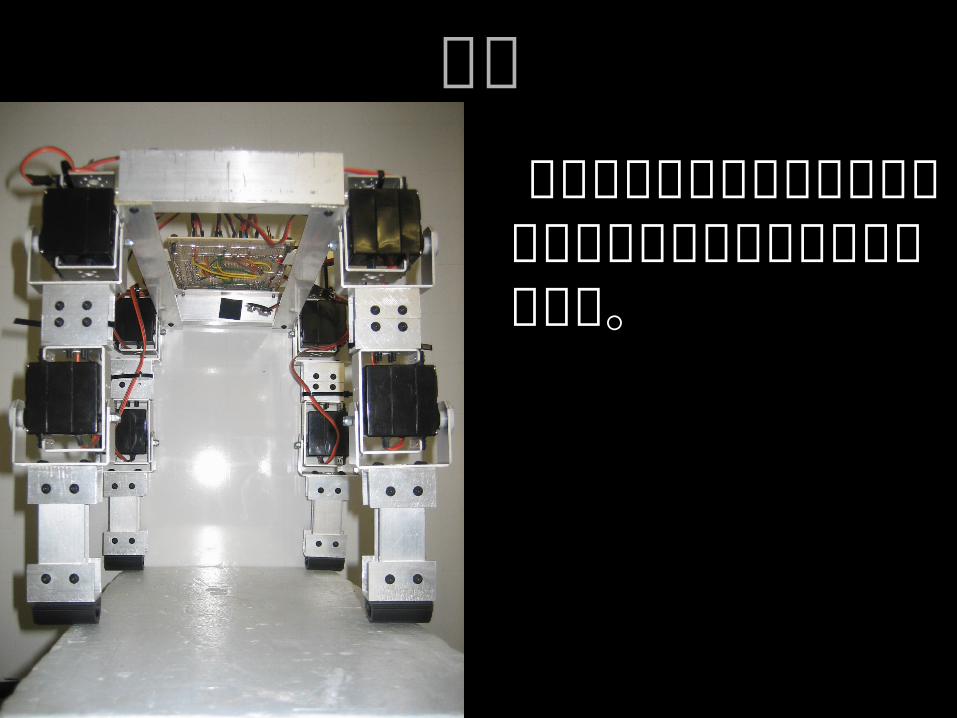
結果結果 製作したロボッ 製作したロボットをクロール歩容トをクロール歩容で歩行させることで歩行させることができました。ができました。
Related Documents











