อ อ . . ออ ออ . . อออออออ ออออออออออออ อออออออ ออออออออออออ อออออออออออออออออออ อออออออออออออออออออ อออออออออออออออออ อออออออออออออออออ ออออออออออออออออออ ออออออออออออออออออ บบบบบ 4 บบบบบบบบ(Leveling) Version 2 1 Slide บบบ บ.บบ.บบบบบบบ บบบบบ บบบบบบบ

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ออ..ดรดร..ชาติชาย ไวยสรุะสงิห์ชาติชาย ไวยสรุะสงิห์ภาควชิาวศิวกรรมโยธาภาควชิาวศิวกรรมโยธาคณะวศิวกรรมศาสตร์คณะวศิวกรรมศาสตร์มหาวทิยาลัยขอนแก่นมหาวทิยาลัยขอนแก่น
บทท่ี 4การระดับ(Leveling)
Version 2
1Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

คำาสำาคัญและนิยามต่างๆ (Keywords and Its
Definitions)• แนวด่ิง (Vertical line) – แนวท่ีมทิีศทางตามแรงโน้ม
ถ่วงของโลก• แนวราบ (Horizontal line) - แนวท่ีต้ังฉากแนวด่ิง• พื้นผิวระดับ (Level surface) -• แนวระดับ (Level line) -• พื้นหลักฐานทางด่ิง (Vertical datum) -• ค่าระดับความสงู (Elevation) – ความสงูเหนือระดับอ้างอิง• ค่าต่างระดับ (Elevation difference) - ค่าต่างระดับ
ระหวา่งจุดสองจุด
2Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

มโนทัศน์ของการระดับ(Concept of Leveling)
ผิวโลกผิวโลก
แนวระดับแนวระดับ
พื้นหลักฐานอ้างอิงพื้นหลักฐานอ้างอิง**รทกรทก. = 0.000m. = 0.000m
แนวราบแนวราบ
แนวดิ่
งแน
วดิ่ง
แนวดิ
ง่แน
วดิง่
ค่าระดับที่จุด ค่าระดับที่จุด AA
ค่าระดับที่จุด ค่าระดับที่จุด BB
แนวราบแนวราบค่าต่างระดับ
ค่าต่างระดับ A-BA-B
**รทก รทก = = ระดับนำ้าทะเลปานกลางระดับนำ้าทะเลปานกลาง
แนวระดับแนวระดับ
ระนาบราบระนาบราบ
AA
BB
3Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

อุปกรณ์หลักที่ใชก้ารออกสนาม
4Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

อุปกรณ์ท่ีใชก้ารออกสนามอุปกรณ์ท่ีใชก้ารออกสนามอุปกรณ์หลักอุปกรณ์หลัก1 .1 .ขาต้ังกล้องขาต้ังกล้อง 1 1 อันอัน2.2. กล้องระดับ กล้องระดับ N-10 N-10 1 1 ตัว ตัว
((ต้องไมล่ืมบนัทึกหมายกล้องต้องไมล่ืมบนัทึกหมายกล้อง))1 .1 .ไมร้ะดับ ไมร้ะดับ (Staff)(Staff) 2 2 อันอัน2 .2 .ฐานรองไมร้ะดับ ฐานรองไมร้ะดับ (Foot plate)(Foot plate) 4 4 อันอันอุปกรณ์เสรมิอุปกรณ์เสรมิ3.3. แถบวดัระยะ แถบวดัระยะ (Tape)(Tape)4.4. ห่วงคะแนน ห่วงคะแนน (Pin)(Pin)
5Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

กล้องระดับและไมร้ะดับ
6Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

กล้องระดับ
• กล้องระดับสามารถใชห้าค่าต่างระดับระหวา่งจุดสองจุดท่ีต้องการ ได้ในระยะไมเ่กิน 140 เมตร โดยประมาณ
• การสอ่งกล้องไปยงัไมร้ะดับระยะท่ีเหมาะสมไมค่วรเกิน 70-90 เมตร
• หากตำาแหน่งของจุดทัง้สองอยูห่า่งกันมาก หรอืจุดทัง้สองมค่ีาต่างระดับกันมาก หรอืมสีิง่กีดขวางทำาใหไ้มส่ามารถตัง้กล้องระดับใหเ้หน็จุดทัง้สองได้
• ดังนัน้ จงึจำาเป็นต้องทำาการตัง้กล้องหลายครัง้ เพื่อทำาการถ่ายระดับจากจุดท่ีหน่ึงไปยงัจุดท่ีสองอยา่งต่อเน่ืองกันไป
7Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ชนิดของกล้องระดับTypes of Surveying Levels
• Dumpy Level• Tilting Level• Automatic Level• Digital Level
8Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 6.4 (p. 110)กล้องระดับดั้มป้ี Dumpy level (an old instrument). (Courtesy of Berger Instruments).

10
Dumpy (Wye) Level

11
Leveling a four (4) legged instrument
Left thumb rule

องค์ประกอบพื้นฐานกล้องระดับ
ลำากล้องฉากรบัภาพเลนสต์า
แนวเล็ง
หลอดระดับฟองยาว
สกรูปรบัฐานกล้อง
ขาต้ังกล้องระดับ
เลนสว์ตัถุ
12Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

กล้องระดับ กล้องระดับ TiltingTilting
13Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
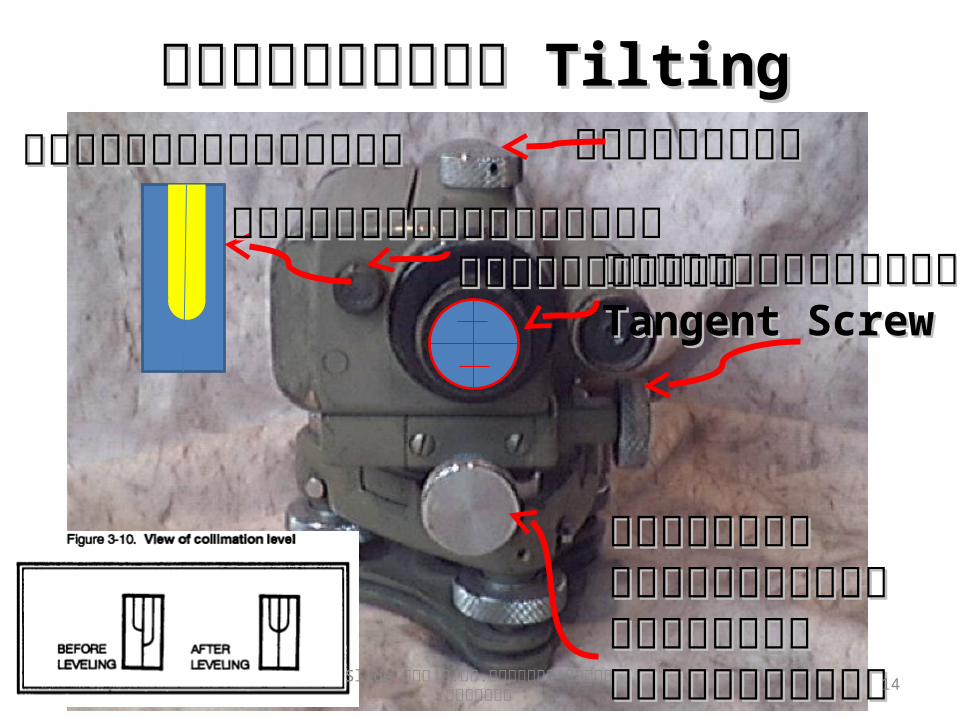
ปรบัโฟกัสปรบัโฟกัส
ปรบัทิศทางละเอียดปรบัทิศทางละเอียดTangent ScrewTangent Screw
ปรบัหลอดระดับปรบัหลอดระดับฟองยาวฟองยาวหรอืหลอดระดับหรอืหลอดระดับรูปตัวยูรูปตัวยู
เลนสใ์กล้ตาเลนสใ์กล้ตา
หลอดระดับฟองยาวหลอดระดับฟองยาวดหูลอดระดับฟองยาวดหูลอดระดับฟองยาว
กล้องระดับ กล้องระดับ TiltingTilting
14Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

สว่นประกอบกล้องระดับ NA2
15Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Automatic Level
16Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

compensator
การปรบัปรซิมึแนวเล็งในกล้องระดับอัตโนมติั
• ทกุครัง้ที่มกีารปรบัหลอดระดับฟองกลมในอยูร่ะนาบราบอยา่งหยาบๆแล้ว• แล้วตัว Automatic Compensator ในกล้องระดับกล้องระดับอัตโนมติัอัตโนมติัจะปรบัแนวเล็งใหอ้ยูใ่นระนาบราบ (Horizontal Plane) เอง
17Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
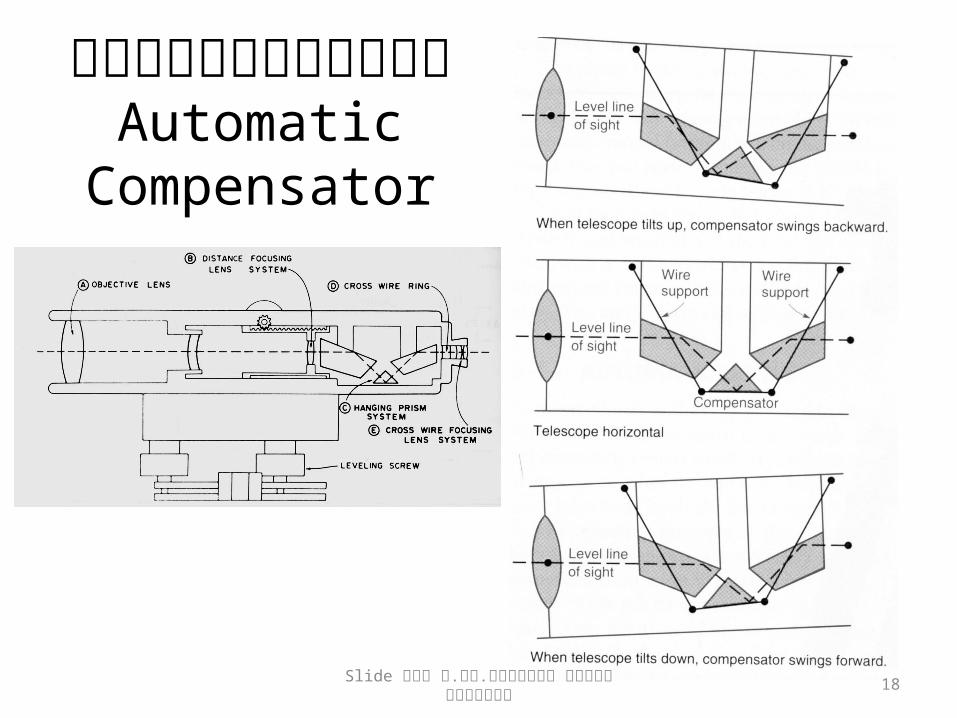
การทำางานของ Automatic
Compensator
18Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

องค์ประกอบของกล้องระดับอัตโนมติั• Foot Screws คือ ปุ่มที่ฐานกล้องใชใ้นการปรบั
ระดับฟองกลม• Eye Piece Lens คือ เลนสต์าใชส้ำาหรบัปรบัภาพ
สายใยใหช้ดัเจน• Tangent Screw คือ ปุ่มปรบัเล่ือนการมองภาพให้
ตรงตำาแหน่งไมร้ะดับ• Focusing Screw คือ ปุ่มปรบัภาพไมร้ะดับให้
ชดัเจน
19Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

กล้องระดับอิเล็คทรอนิคสแ์ละไมร้ะดับบารโ์ค้ด
20Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 6.6 (p. 111)DiNi total level station, which has electronic sensor for reading a bar code to determine elevations. (t can also be used for distance and angle measurement. (Courtesy of Carl Zeiss, Inc.)

กล้องระดับอิเล็คทรอนิคส ์NAK3003
22Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Leveling Rods(ไมs้taff)
23Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

(a) Telescopic staffs(b) A folding staff
(c) An one-piece invar staff
(d) A staff level
(e) Readings
on a staff
24Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 6.7 (p. 112)Portion of bar code used with electronic digital level.
Leveling Rodsไมs้taff ติดบารโ์ค้ด

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 7.12 (p. 138)Hand signals.

การอ่านค่าไมร้ะดับ
27Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การอ่านไมs้taff 3 สายใย
28Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
U-L
C-L
U-C

การขจดั Parallax ก่อนอ่านไมร้ะดับ1 .นักศึกษาต้องปรบัภาพสายใยให้ชดัเจนโดยหมุนเลนส์
ใกล้ตาก่อน 2 .แล้วจงึปรบัภาพไมร้ะดับให้ชดัโดยหมุนปุ่มปรบัภาพ
เพื่อขจดัการเกิดภาพเหลื่อม (Parallax)3 .ตรวจสอบการเกิดภาพเหล่ือม โดยการมองเล่ือนสายตา
ขึ้นลง และสงัเกตวา่ ภาพและสายใยเล่ือนออกจากกันหรอืไม ่ถ้าเล่ือนแสดงวา่ มกีารเกิดภาพเหล่ือม ใหป้รบัตามขอ้ 1 และ 2 ใหมอี่กครัง้
4.4. ก่อนอ่านค่าไมร้ะดับนักศึกษาต้องปรบัระดับหลอดระดับก่อนอ่านค่าไมร้ะดับนักศึกษาต้องปรบัระดับหลอดระดับยาวด้วย ยาวด้วย Tilting Screw Tilting Screw ก่อนทกุครัง้ ก่อนทกุครัง้ ((ปรบัหลอดระดับเขาปรบัหลอดระดับเขาควายควาย))
29Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
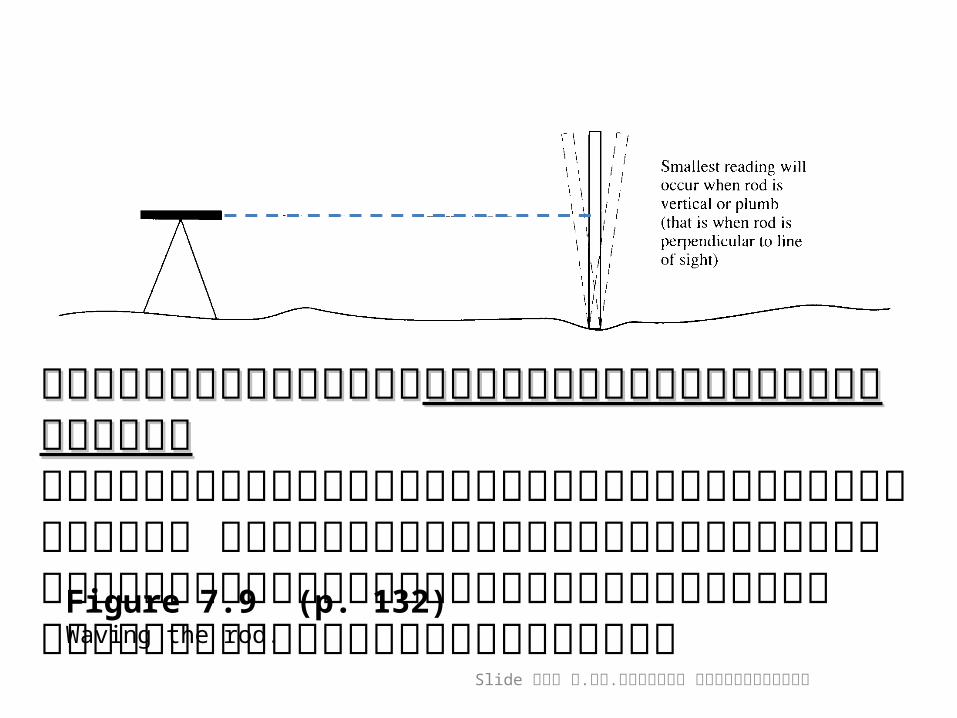
Figure 7.9 (p. 132)Waving the rod.
กรณีท่ีไมร้ะดับกรณีท่ีไมร้ะดับไมไ่ด้ติดหลอดระดับฟองกลมไมไ่ด้ติดหลอดระดับฟองกลมใหส้งัเกตค่าไมร้ะดับที่อ่านได้น้อยท่ีสดุ โดยค่านัน้จะเป็นค่าที่อ่านได้ขณะไมร้ะดับตัง้อยูใ่นแนวดิ่งหรอืตัง้ฉากกับแนวเล็งพอดี
Leveling
• Control Surveying– Differential Leveling
งานชัน้หนึ่ง งานชัน้สอง งานชัน้สาม และงานชัน้สี่– Trigonometric Leveling
งานชัน้ตำากวา่งานชัน้สี่• Detail Surveying
– Profile Leveling– Cross Section Leveling
31Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Differential LevelingDifferential Leveling
BSBS
BS
BS
BSBS
FSFS
FS
FSFS
BM
TBM
TP1 TP2
TP3TP4
Control Survey Control Survey ทางด่ิงทางด่ิง
32Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ชนิดของหมุดควบคมุ• Full Ground Control Point• Benchmark• Ground Control Point (GCP)
– GCP Triangulation– GCP GPS– GCP Astronomy
33Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Profile และ Cross Section
BSBS
BS
BS
BSBS
FSFS
FS
FSFS
BM
TBM
TP1 TP2
TP3TP4
ISISISIS
ISISISIS
ISISISIS
ISIS
0+00
0
0+05
0
0+10
0
0+15
0
0+20
0
0+25
0
CL Profile Leveling
Profile LevelingX-Se
ction
X-Secti
on
Detail Survey Detail Survey ทางด่ิงทางด่ิง
34Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

BSBS
BS
BS
BSBS
FSFS
FS
FSFS
BM
TBM
TP1 TP2
TP3TP4
ISIS
ISIS
ISIS
IS
0+00
0
0+05
0
0+10
0
0+15
0
0+20
0
0+25
0
CL
Profile และ Cross Section (ต่อ)Detail Survey Detail Survey ทางด่ิงทางด่ิง
35Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Definitions
• Benchmark (BM)• Temporary benchmark (TBM)• Turning point (TP)• Backsight (BS)• Height of instrument (HI)• Foresight (FS)• Intermediate sight (IS)
36Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

BM, TBM, BS, FS, TP และ Leveling
BSBS
BS
BS
BSBS
FSFS
FS
FSFS
BM
TBM
TP1 TP2
TP3TP4
Differential LevelingDifferential Leveling
37Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

BM, TBM, BS, FS, IS และ TP
BSBS
BS
BS
BSBS
FSFS
FS
FSFS
BM
TBM
TP1 TP2
TP3TP4
ISISISIS
ISISISIS
ISISISIS
ISIS
0+00
0
0+05
0
0+10
0
0+15
0
0+20
0
0+25
0
CL Profile Leveling
Profile LevelingX-Se
ction
X-Secti
on
38Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การหาค่าระดับความสงูด้วยกล้องระดับ
39Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
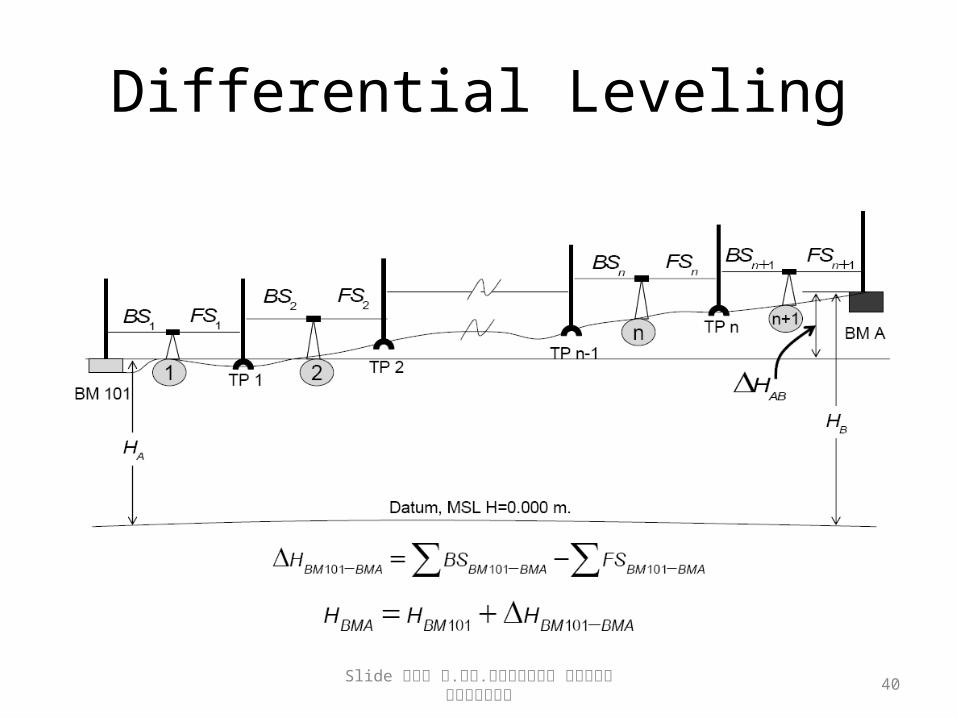
Differential Leveling
40Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

41Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

42Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การคำานวณ• ค่าแยง้จากการทำางาน = (|0.160|-|0.178|)
= 0.018 ม. = 18 มม.• ค่าแยง้ท่ียอมใหไ้ด้ตามชัน้งานระดับชัน้สาม = ±12mm(K)1/2
– 12 mm (1.24) 1/2 = 13.4• ค่าแยง้ท่ียอมใหไ้ด้ตามชัน้งานระดับชัน้สี ่= ±25mm(K)1/2
– 25 mm (1.24) 1/2 = 27.83• สำาหรบัเกณฑ์งานชัน้สาม – เกินค่าแยง้ท่ียอมใหไ้ด้ Reject• สำาหรบัเกณฑ์งานชัน้สี ่– ไมเ่กินค่าแยง้ท่ียอมใหไ้ด้ Accept
43Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

คำานวณค่าระดับที่จุด A• ค่าต่างระดับเฉล่ียจาก BM ไป A = (-0.160-
0.178)/2 = -0.169 ม.
• ค่าระดับที่จุด A = 10+(-0.169) = 9.831 ม.
44Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
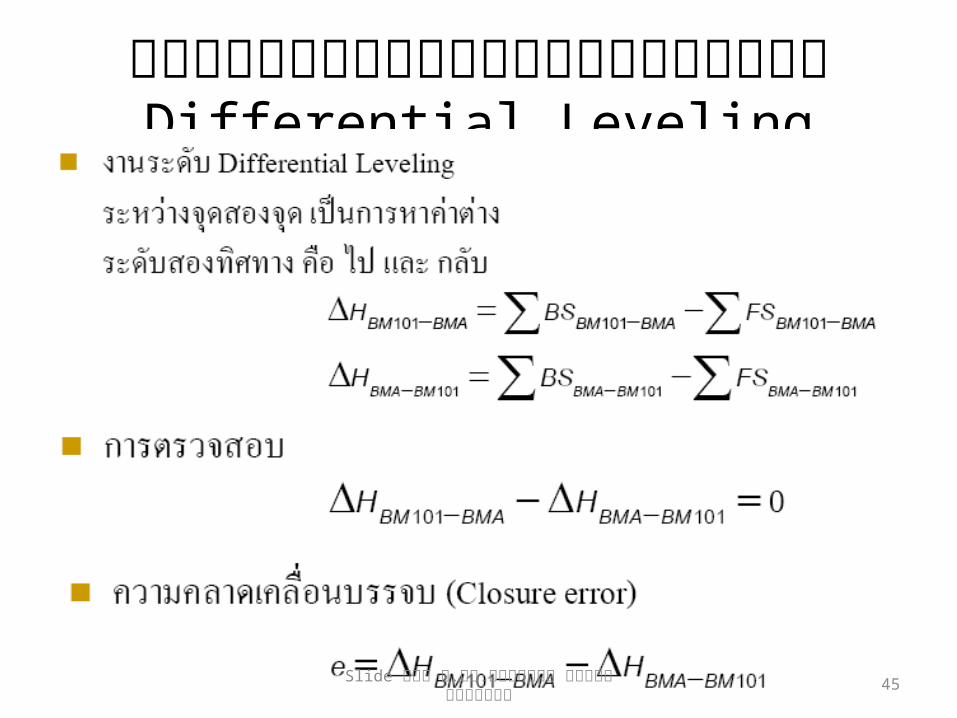
สรุปการตรวจสอบงานระดับ Differential Leveling
45Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ขอ้กำาหนดงานระดับ (FGCC Standard)
46Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ขอ้กำาหนดงานระดับชัน้สาม
ตามมาตรฐานของ FGCC ได้กำาหนดกรรมวธิใีนการทำางานหาค่าต่างระดับ (Differential Leveling) พอสรุป เบื้องต้น ได้ดังนี้1 .ระยะตัง้กล้องถึงไมร้ะดับต้องไมเ่กิน 90 เมตร2. ค่าต่างระยะ BS และ FS ของการตัง้กล้องแต่ละครัง้ ไมเ่กิน 10 เมตร3. ค่าต่างระยะ BS และ FS ของการทำาระดับแต่ละเท่ียวไมเ่กิน 10 เมตร4. ค่าแยง้ของค่าต่างระดับไปและกลับไมเ่กิน ±12mm√K 47Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
ขอ้กำาหนดงานระดับชัน้สอง คลาสสอง
ตามมาตรฐานของ FGCC ได้กำาหนดกรรมวธิใีนการทำางานหาค่าต่างระดับ (Differential Leveling) พอสรุป เบื้องต้น ได้ดังนี้1 .ระยะตัง้กล้องถึงไมร้ะดับต้องไมเ่กิน 70 เมตร2 .ค่าต่างระยะ BS และ FS ของการตัง้กล้องแต่ละครัง้ ไมเ่กิน 10 เมตร3 .ค่าต่างระยะ BS และ FS ของการทำาระดับแต่ละเท่ียวไมเ่กิน 10 เมตร4 .ค่าแยง้ของค่าต่างระดับไปและกลับไมเ่กิน ±8mm√K5 .5 .ต้องใช้ต้องใช้ Invar StaffInvar Staff
48Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ขอ้กำาหนดงานระดับชัน้สอง คลาสหนึ่ง
ตามมาตรฐานของ FGCC ได้กำาหนดกรรมวธิใีนการทำางานหาค่าต่างระดับ (Differential Leveling) พอสรุป เบื้องต้น ได้ดังนี้1 .ระยะตัง้กล้องถึงไมร้ะดับต้องไมเ่กิน 60 เมตร2 .ค่าต่างระยะ BS และ FS ของการตัง้กล้องแต่ละครัง้ ไมเ่กิน 5 เมตร3 .ค่าต่างระยะ BS และ FS ของการทำาระดับแต่ละเท่ียวไมเ่กิน 10 เมตร4 .ค่าแยง้ของค่าต่างระดับไปและกลับไมเ่กิน ±6mm√K5 .5 .ต้องใช้ต้องใช้ Invar StaffInvar Staff6. กล้องระดับTilting หรอื กล้องระดับอัตโนมติั พรอ้มด้วย Optical Micrometer หรอื กล้องระดับสามสายใย
49Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ขอ้กำาหนดงานระดับชัน้หน่ึง คลาสหน่ึงและสอง
ตามมาตรฐานของ FGCC ได้กำาหนดกรรมวธิใีนการทำางานหาค่าต่างระดับ (Differential Leveling) พอสรุป เบื้องต้น ได้ดังน้ี1 .ระยะตัง้กล้องถึงไมร้ะดับต้อง
1 .ไมเ่กิน 50 เมตร สำาหรบัคลาสหน่ึง2. ไมเ่กิน 60 เมตร สำาหรบัคลาสสอง
2 .ค่าต่างระยะ BS และ FS ของการตัง้กล้องแต่ละครัง้ ไม่เกิน 5 เมตร3. ค่าต่างระยะ BS และ FS ของการทำาระดับแต่ละเท่ียวไม่เกิน 10 เมตร4. ค่าแยง้ของค่าต่างระดับไปและกลับไมเ่กิน
1 .±4mm√K สำาหรบัคลาสหนึ่ง (งานระดับครบวงจร)2 .±5mm√K สำาหรบัคลาสสอง (งานระดับครบวงจร)
5 .5 .ต้องใช้ต้องใช้ Invar StaffInvar Staff6. กล้องระดับTilting หรอื กล้องระดับอัตโนมติั พรอ้มด้วย พรอ้มด้วย Parallel Plate MicrometerParallel Plate Micrometer
50Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การปรบัแก้งานระดับครบวงจรLevel Loop Adjustments
• ถ้าความเคล่ือนเคล่ือนบรรจบในการถ่ายระดับตำ่ากวา่เกณฑ์งานท่ีกำาหนด ใหท้ำาการถ่ายระดับ(leveling) ใหมอี่กครัง้
• แต่ถ้าความคลาดเคล่ือนบรรจบในการถ่ายระดับอยูเ่กณฑ์งานท่ียอมรบัได้ ใหก้ารคำานวณปรบัแก้โดยความคลาดเคล่ือนท่ีเกิดขึ้นจะมกีารกระจายตัวท่ีสอดคล้องกับระยะทางในการถ่ายระดับ (the distances leveled หรอื จำานวนครัง้ของการตัง้กล้องระดับ (or the number of instrument setups)
• ดังแสดงในตัวอยา่งถัดไป51Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Level Loop Adjustment
52Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การถือไมร้ะดับกลับหวัการถือไมร้ะดับกลับหวั (Inverted Staff(Inverted Staff)• กรณีท่ีต้องการหาค่าต่างระดับระหวา่งจุดสองจุด โดยท่ีจุดอ้างอิงอยูส่งู
กวา่แนวเล็ง เชน่ เพดาน หรอื ด้านล้างของสะพาน (underside of bridge) ใหก้ระทำาดังน้ี
• ถือไมs้taff กลับหวั โดยใหด้้านท่ีเป็น ”ศูนย”์สมัผัสสิง่จุดอ้างอิงท่ีต้องการหาค่าต่างระดับ และบนัทึกค่าท่ีอ่านได้พรอ้มติดเครื่องหมายลบ
53Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Systematic Errors ในงานระดับ• สายกลางไมอ่ยูแ่นวระนาบราบ• แนวเล็งไมอ่ยูใ่นแนวระนาบราบ• ความโค้งของผิวโลก• การหกัเหของแสง
54Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การวดัสอบสายใย
55Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การตรวจสอบความคลาดเคล่ือนแนวเล็ง
56Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Two Peg Test (ตรวจสอบแนวเล็งวา่อยูใ่นแนวราบหรอื
ไม?่)
2 2 1 1( ) ( )A B A BBS FS BS FSD
57Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
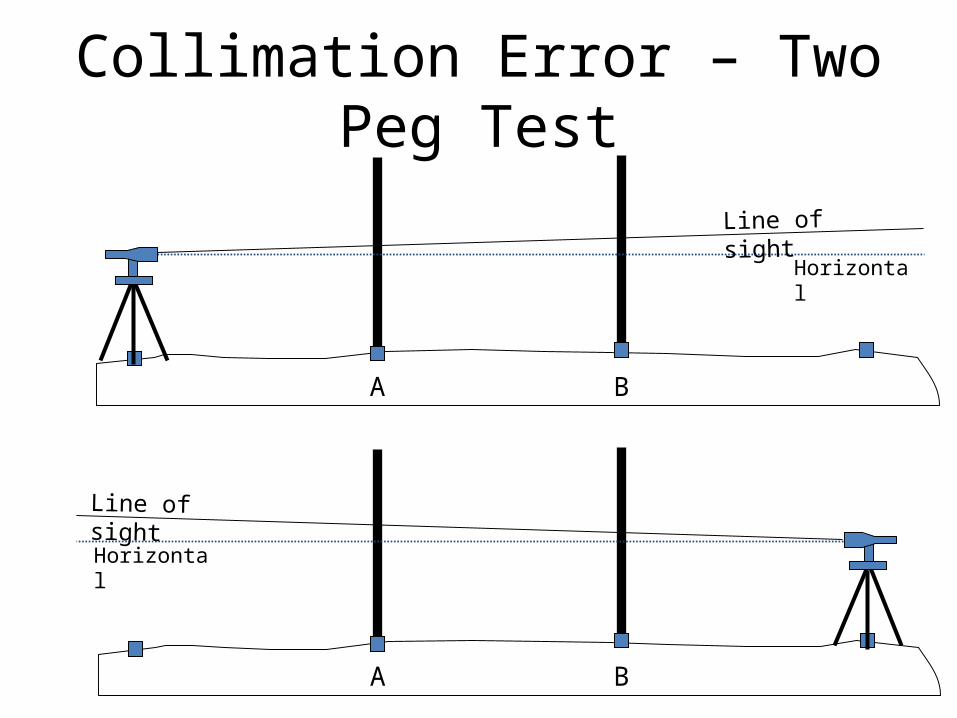
Collimation Error – Two Peg Test
Horizontal
Horizontal
Line of sight
A B
A B
Line of sight
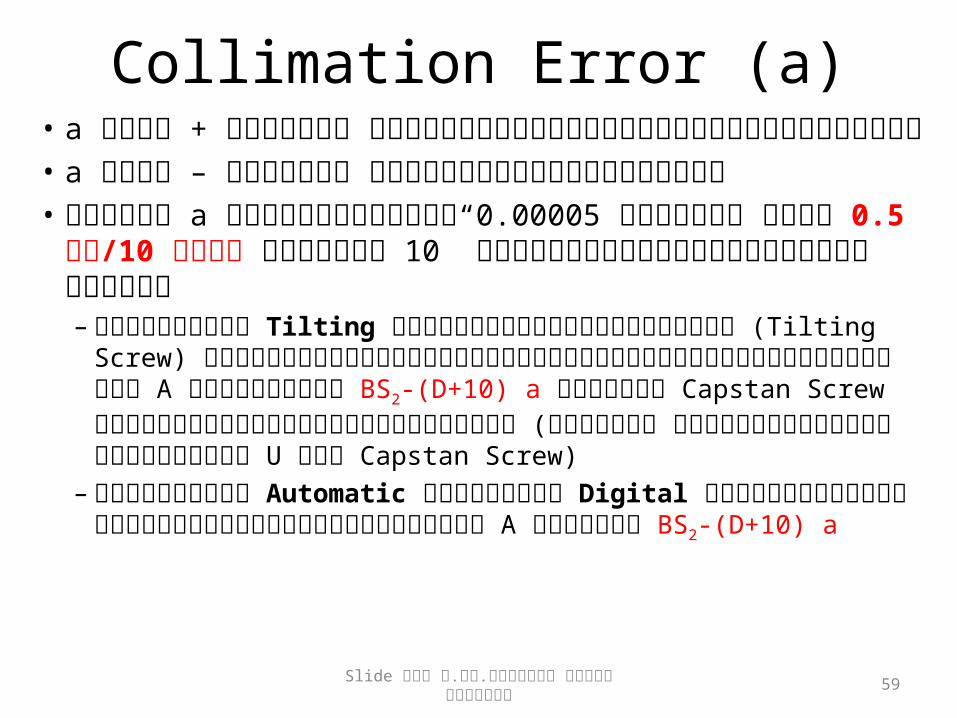
Collimation Error (a)• a เป็น + แสดงวา่ แนวเล็งเหนิหรอืเงยขึ้นจากแนวราบ• a เป็น – แสดงวา่ แนวเล็งกดลงจากแนวราบ• ถ้าค่า a มค่ีาเกินกวา่ 0.00005 เรเดียน หรอื 0.5 มม/10
เมตร คิดเป็น 10” ควรมกีารปรบัแก้แนวเล็งดังนี้– กล้องระดับ Tilting แนวเล็งโดยควงสกรูกระดก (Tilting Screw)
ใหก้ล้องเงยขึ้นหรอืกดลงจนกระทัง้อ่านไมร้ะดับท่ี A ได้เท่ากับ BS2-(D+10) a แล้วใช ้Capstan Screw ปรบัใหล้กูนำ้ามาอยูต่รงกลาง (นัน่คือ ปรบัใหล้กูนำ้าเป็นรูปตัว U โดย Capstan Screw)
– กล้องระดับ Automatic หรอืกล้อง Digital ใหส้ายใยราบจนกระทัง้ค่าอ่านไมร้ะดับท่ี A เท่ากับ BS2-(D+10) a
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 59

Tilting Screw & Capstan Screwในกล้อง Tilting
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 60

Tilting Screw ในกล้อง Tilting
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 61

Two Peg Test (ต่อ)
62Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Example• ในการตรวจสอบแนวเล็งของกล้องระดับ โดยวธี ี(AxBx) มผีล
การอ่านค่าไมร้ะดับในการตรวจสอบแนวเล็งของกล้อง ดังตารางด้านล่าง โดยระยะหา่งระหวา่งไมร้ะดับ (D) เป็น 60 เมตร
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 63
ตำาแหน่งจุดตั้งกล้อง ค่าไมร้ะดับ ท่ี A
ค่าไม้ระดับท่ี B
ตัง้กล้องตำาแหน่งท่ี 1 (A x B)
2.416 1.268
ตัง้กล้องตำาแหน่งท่ี 2 (A B x)
2.693 1.538• a = [(2.693-1.538)- 2.416-1.268]/60 = (1.155-1.148)/60
a = 0.00017 Rad = 24” (a เป็น + แสดงวา่แนวเล็งกล้องเหนิขึ้น)
a มค่ีามากกวา่เกณฑ์ 0.00005 Rad หรอื 10” จะต้องปรบัแก้แนวเล็งกล้องใหอ้ยูแ่นวราบ

Example• นัน่คือ ต้องปรบัค่า Tilting จนกระทัง้เมื่อตัง้กล้องตำาแหน่งท่ี 2
อ่านค่าไมร้ะดับท่ีจุด A ได้ BS2-(D+10)x0.00017 = 2.693 – (60+10)x0.00017 = 2.693-0.008 = 2.685 ม.และอ่านค่าไมร้ะดับท่ีจุด B ได้ FS2 – 10x0.00017 = 1.538 – 10x 0.00017 = 1.538 – 0.001 = 1.537 ม.
ตรวจสอบผลต่างระดับ 2.685 – 1.537 = 1.148 ม. และDHtrue= BS1- FS1 = 2.416-1.268 = 1.148 ม. OK
• แล้วปรบั Capstan Screw จนกระทัง้หลอดระดับเขาควายมาบรรจบกันเป็นรูปตัว U
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 64
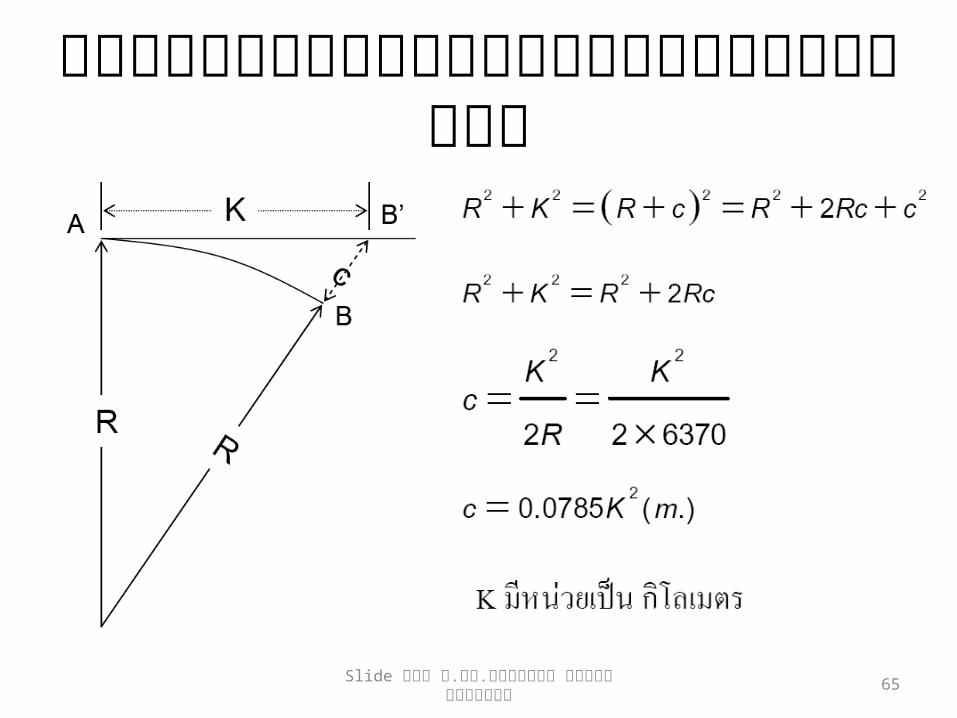
ผลกระทบจากความโค้งของผิวโลก
65Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ผลกระทบจากการหกัเหของแสง
66Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Atmospheric Refraction
Horizontal Line
Line of sight (refracted)

ผลกระทบจากความโค้งของผิวโลกและการหกัเหของแสง
• รวมสมการทั้งสองเขา้ด้วยกันจะได้วา่ รวมสมการทั้งสองเขา้ด้วยกันจะได้วา่ • HHcrcr = 0.0675K = 0.0675K22 (*(*เมื่อ เมื่อ K K เป็นระยะในหน่วย เป็นระยะในหน่วย
กมกม.).)• และเขยีนให้อยูใ่นรูปของระยะจากจุดตั้งกล้องถึงไมร้ะดับ ในและเขยีนให้อยูใ่นรูปของระยะจากจุดตั้งกล้องถึงไมร้ะดับ ใน
หน่วยเมตร จะได้วา่หน่วยเมตร จะได้วา่HHcrcr = CR (D/1000) = CR (D/1000)22
เมื่อ เมื่อ CR = 0.0675 CR = 0.0675 สำาหรบั สำาหรบั D D ในหน่วย เมตรในหน่วย เมตรCR = 0.0206 CR = 0.0206 สำาหรบั สำาหรบั D D ในหน่วย ฟุตในหน่วย ฟุต
68Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

รวมผลกระทบจาก Systematic Errors ในงานระดับ
• สำาหรบัการตัง้กล้องระดับครัง้เดียว (For an Individual Setup):
• สำาหรบักาตัง้ระดับเป็นชุด (For a Series of Setups):
2 21 2 2 1 2( ) ( ) ( )
(1000)CRh BS FS D D D D
2 2
2( ) ( ) ( )(1000)BS FS BS FS
CRh BS FS D D D D
69Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การทำาระดับแบบสอบกลับ (Reciprocal Leveling)• ทำาระดับขา้มลำานำ้าหรอืขา้มหบุเขา + ไมส่ามารถตัง้กล้องระหวา่งกลางไม้
ระดับได้• จะทำาใหร้ะยะไมห้น้าและไมห้ลังต่างกันมาก • แนวเล็งท่ีมกีารสอ่งไกลๆจะมผีลของความโค้งของโลกและการหกัเห
ของแสงในชัน้บรรยากาศ• เพื่อกำาจดัความคลาดเคล่ือนต่างๆ ดังนัน้ จงึต้องจำาเป็นต้องตัง้กล้อง
ทัง้สองฝ่ังของลำานำ้าดังรูป
AB
70Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

AB
(1) (2)
• ตัง้กล้องท่ีจุดท่ี 1– BS1 = a1, FS1 = b1-e, DH1 = a1-(b1-e) = a1-b1+e
• ตัง้กล้องท่ีจุดท่ี 2– BS2 = a2-e, FS2 = b2, DH2 = (a2-e)-b2 = a2-e-b2
• ค่าเฉล่ีย = [(a1-b1+e)+(a2-e-b2)]/2=[(a1-b1)+(a2-b2)]/2
b1 b2a2
a1
ee
71Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

STA BS HI FS Elevation(1)A 0.875 10.875 10.000B 1.495 9.380
(2)A 1.805 11.805B 1.259 10.456
Elev_BMean (9.380+10.456)/2 = 9.963
AB
(1) (2)
72Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การหาความไวหลอดระดับโดยวธิีสนามจากรูป
• s/D = EF/R = nd/R• R = Dnd/s• ค่ามุมของ 1 ชอ่ง (Radian)
= d/r= s/Dn• ความไวหลอดระดับ V”
= s/(Dn.Sin1”)= 206,265/Dn
เมื่อ n คือ จำานวนขดีฟองอากาศท่ีเคล่ือนไปd คือ ความยาวของ 1 ชอ่ง บนหลอด
ระดับ
u
uD
s
E F
C
R
73Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Example• การทดสอบเพื่อหาความไวหลอดระดับได้ผลดังน้ี เมื่อฟองอากาศอยูใ่น
ตำาแหน่งหน่ึงอ่านค่าบนไมร้ะดับได้ 1.573 ม. เมื่อฟองอากาศเคล่ือนไป 5 ชอ่ง อ่านค่าบนไมร้ะดับได้ 1.609 ม. ระยะ 1 ชอ่ง เท่ากับ 2 มม. วางไม้ระดับหา่งจากกล้องเป็นระยะทาง 100 ม. จงหาค่ามุมซึ่งรองรบัด้วยระยะ 1 ชอ่งบนหลอดระดับ และความยาวของรศัมคีวามโค้งของหลอดระดับ
ฟองอากาศเคล่ือนไป 5 ชอ่ง ผลต่างของค่าไมร้ะดับ เป็น 1.609 – 1.573 = 0.036 ม.
เป็นมุม = (0.036x206,265)/100 = 74.26 ฟลิิปดาค่ามุมของ 1 ชอ่ง = 74.26/5 = 14.85 หรอื 15 ฟลิิปดารศัมคีวามโค้งของหลอดระดับเป็น (0.002x206,265)/15 = 27.5
ม.
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 74

ความคลาดเคล่ือนแบบสุม่ในการระดับ(Random Error in Leveling)
• ความคลาดเคล่ือนในการอ่านค่า (Reading Error)
• ความคลาดเคล่ือนจากการระดับ (Leveling Error)
• ความคลาดเคล่ือนการถือไมร้ะดับ (Rod Leveling Error)
75Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ความคลาดเคล่ือนในการอ่านค่า (Reading Error)
เมื่อ• sr แทน ความคลาดเคล่ือนในการถ่ายระดับท่ีเกิดจากการอ่าน• D แทน ระยะจากจุดตัง้กล้องไปยงัไมร้ะดับ• sr/D แทน ความคลาดเคล่ือนในการอ่านต่อระยะจุดตัง้กล้อง
ไปยงัไมร้ะดับ
/ 2r r DD N
76Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
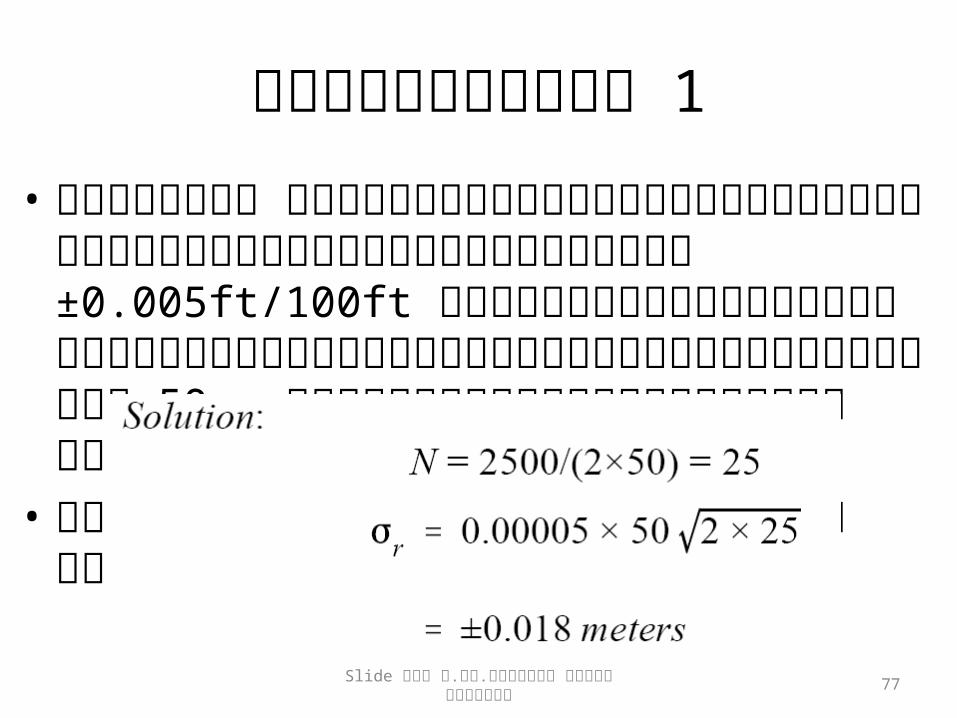
ตัวอยา่งที่ 1• สมมติให ้ในการอ่านค่าไมร้ะดับแต่ละครัง้มค่ีาคลาด
เคล่ือนเป็น ±0.005ft/100ft ในการตัง้กล้องอ่านค่าไมร้ะดับแต่ละครัง้ยาวขาละยาวได้ถึง 50 m และในในการเดินระดับยาวครัง้น้ีเป็นระยะทางยาว 2500 m
• จงประมาณค่าคลาดเคล่ือนในการเดินระดับท่ีเกิดขึ้น?
77Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

เมื่อ• sl แทน ความคลาดเคล่ือนในการถ่ายระดับท่ีเกิดจากเครื่องมอืถ่าย
ระดับผิด(Instrument Misleveling)• sa แทน ค่าประมาณของการถ่ายระดับผิดของเครื่องมอื โดยจะเป็น
ค่าท่ีได้จากโรงงานซึ่งอยูใ่นขอ้บง่ชีท้างเทคนิค (Technical Specification) โดยจะบอกเป็นต่อระยะทางเชน่ ±1.5mm/km หรอืในหน่วยมุมเชน่ ± 0.3” ซึ่งโดยทัว่ไปค่าคลาดเคล่ือนนี้จะอยู่ระหวา่ง ± 0.1” ถึง ± 0.2” สำาหรบัเครื่องมคีวามละเอียดสงู และค่านี้อาจถึง ± 10” สำาหรบักล้องท่ีละเอียดน้อยลงมาก
• D แทน ระยะจากจุดตัง้กล้องไปยงัไมร้ะดับ
ความคลาดเคล่ือนจากการระดับ (Leveling Error)
2l D N
78Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
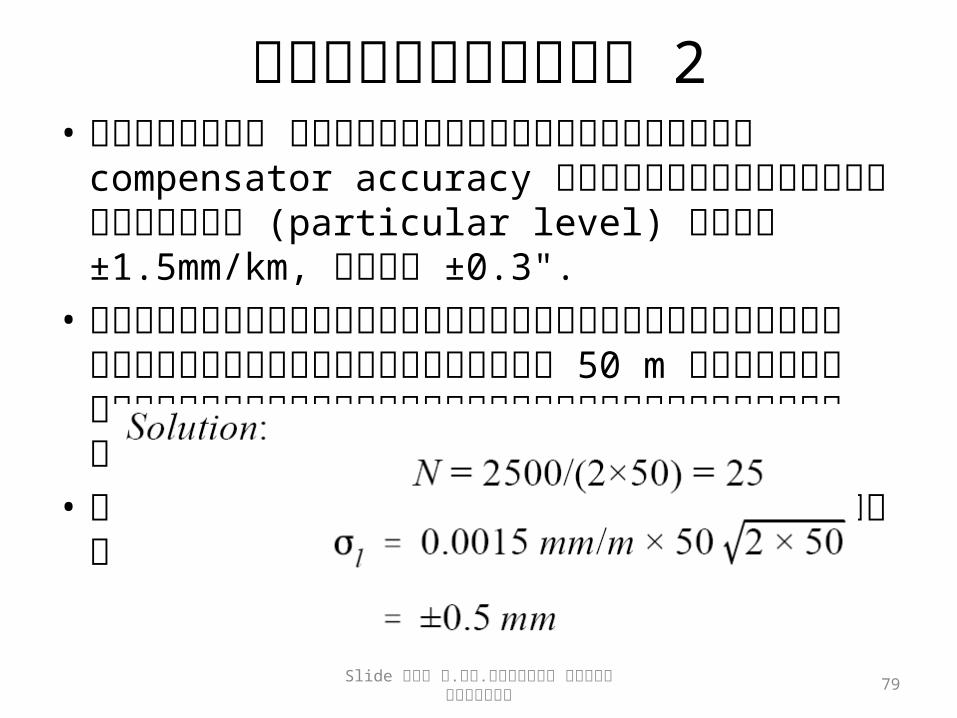
ตัวอยา่งที่ 2• สมมติให ้กล้องระดับอัตโนมติัมี compensator
accuracy สำาหรบังานระดับจำาเพาะ (particular level) เป็น ±1.5mm/km, หรอื ±0.3".
• ในการตัง้กล้องอ่านค่าไมร้ะดับแต่ละครัง้ยาวขาละยาวได้ถึง 50 m และในในการเดินระดับยาวครัง้น้ีเป็นระยะทางยาว 2500 m
• จงประมาณค่าคลาดเคล่ือนในการเดินระดับท่ีเกิดขึ้น?
79Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ความคลาดเคล่ือนการถือไมร้ะดับ (Rod Leveling Error)
• โดยทัว่ไปแล้วคลาดเคล่ือนชนิดน้ีอาจเกิดได้น้อยมากหากมคีวามเครง่ครดัในการปฏิบติังานใหถ้กูต้องตามหลักวชิา เชน่– ตัง้ใจในการถือไมร้ะดับ– รกัษาระยะ Backsight และ
Foresight Distance ใหเ้ท่าๆกัน
2 ( )2LSEleve Sin
80Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การประมาณความคลาดเคล่ือนในการถ่ายระดับ
• สำาหรบัการตัง้กล้อง N ครัง้ ด้วยระยะตัง้กล้องถึงไมร้ะดับ (Sight Distance) เท่าๆกันเป็นระยะ D
2 2/2 ( )h r DD N เมื่อ
• sr/D แทน ความคลาดเคล่ือนในการอ่านต่อระยะจุดตัง้กล้องไปยงัไมร้ะดับ
• sa แทน ค่าประมาณของการถ่ายระดับผิดของเครื่องมอื โดยจะเป็นค่าที่ได้จากโรงงานซึ่งอยูใ่นขอ้บง่ชีท้างเทคนิค (Technical Specification) 81Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
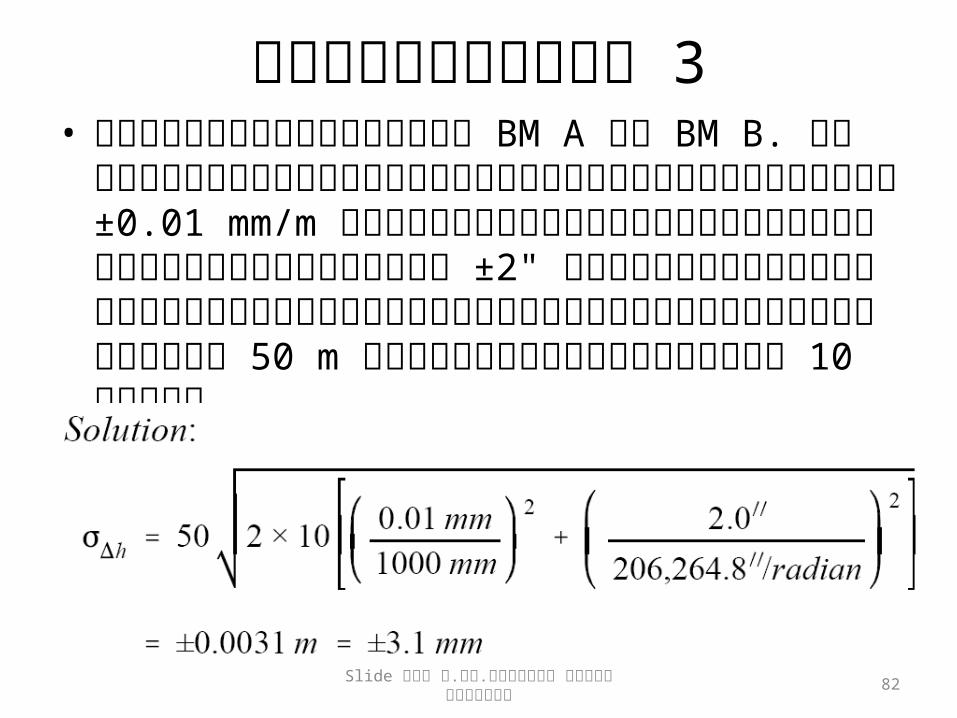
ตัวอยา่งที่ 3• ในการถ่ายระดับจาก BM A ไป BM B. มค่ีาคลาดเคล่ือน
จากการอ่านไมร้ะดับเป็น ±0.01 mm/m ค่าประมาณของการถ่ายระดับผิดของเครื่องมอื ±2" ในการตัง้กล้องอ่านค่าไมร้ะดับแต่ละครัง้ยาวขาละยาวได้ถึง 50 m สำาหรบัการตัง้กล้อง 10 ครัง้
• ค่าประมาณของค่าคลาดเคล่ือนในการหาค่าต่างระดับระหวา่งจุด A และ B เป็นเท่าใด?
82Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Profile & X Section Levelingการหาค่าระดับตามยาวและตามขวาง
83Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Profile & X Section Levelingการหาค่าระดับตามยาวและตามขวาง
BSBS
BS
BS
BSBS
FSFS
FS
FSFS
BM
TBM
TP1 TP2
TP3TP4
ISISISIS
ISISISIS
ISISISIS
ISIS
0+00
0
0+05
0
0+10
0
0+15
0
0+20
0
0+25
0
CL Profile Leveling
Profile LevelingX-Se
ction
X-Secti
on
84Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Profile & X Section Levelingการหาค่าระดับตามยาวและตามขวาง
(ต่อ)BS
BS
BS
BS
BSBS
FSFS
FS
FSFS
BM
TBM
TP1 TP2
TP3TP4
ISIS
ISIS
ISIS
IS
0+00
0
0+05
0
0+10
0
0+15
0
0+20
0
0+25
0
CL
85Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การสำารวจรูปตัดตามยาวแลรูปตัดตามขวาง
• Profile Leveling (การรงัวดัรูปตัดตามยาว)• Cross Section Leveling (การรงัวดัรูปตัดตาม
ขวาง)
86Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การรงัวดัรูปตัดตามแนวยาว (Profile)
• ต้องมมีาตรฐานกำาหนดการตรวจสอบสำาหรบัการเดินระดับ เชน่
• งานชัน้ท่ีสาม กำาหนดไว ้ - 12+/ mm. √K หรอื• กำาหนดไวเ้ป็นอยา่งอ่ืน ได้แก่ - 25 mm. √K• การเดินระดับอ่านไมร้ะดับ 3 สายใย เพื่อใหท้ราบค่า
ระยะทาง K• การเดินระดับ 3 สายใยใหอ่้านละเอียดมลิลิเมตร• การอ่านค่าไมร้ะดับ IS อ่านสายใยกลางเพยีงสายใย
เดียว และอ่านละเอียดเพยีงเซนติเมตร87Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การรงัวดัรูปตัดตามแนวยาว (Profile)
88Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การรงัวดัรูปตัดตามยาว(Profile Leveling)
89Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การเขยีนรูปตัดตามแนวยาว
90Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
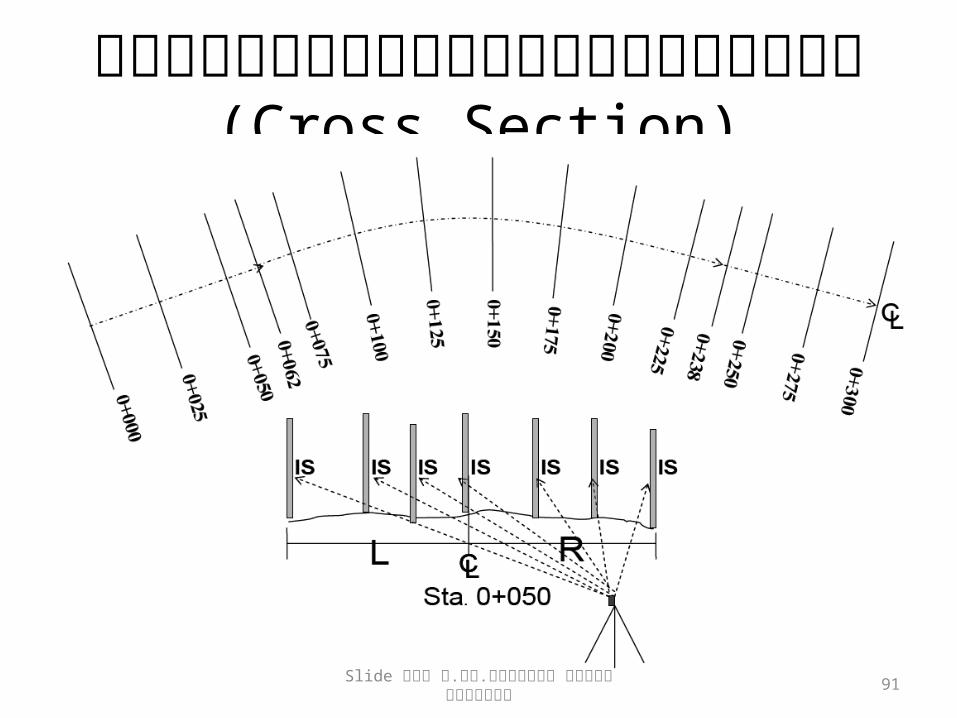
การรงัวดัรูปตัดตามขวาง (Cross Section)
91Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การรงัวดัรูปตัดตามขวาง (Cross Section)
• ใชว้ธิกีารเชน่เดียวกับการรงัวดัรูปตัดตามแนวยาว• ทิศทางการเดินระดับทิศทางเดียวกับระยะสถานี• หากทราบค่าระดับจุดตำาแหน่งจากงานรงัวดัรูปตัดตาม
แนวยาว สามารถใชเ้ป็นค่าไมร้ะดับหลังในการรงัวดัรูปตัดตามขวางได้
• การอ่านค่าไมร้ะดับ อ่านสายใยกลาง ละเอียดเพยีงเซนติเมตร
• สามารถรงัวดัรูปตัดตามแนวและตามขวางพรอ้มกัน หรอืแยกจากกันก็ได้
92Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การรงัวดัรูปตัดตามขวาง
93Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

การเขยีนรูปตัดตามขวาง
94Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Example of Profile Leveling
95Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

ตัวอยา่งการบนัทึกสมุดสนามงานProfile Leveling
96Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 8.7 (p. 152)Profile leveling notes.
ตัวอยา่งการบนัทึกสมุดสนามงานProfile Leveling

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 8.8 (p. 154)Profile and trial grade lines.

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 8.9 (p. 155)Suggested locations for rod readings for cross-section levels.

Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Figure 8.11 (p. 156)Profile and cross-section notes.
ตัวอยา่งการบนัทึกสมุดสนามงานProfile & X-Section Leveling

การนำาเสนอความแตกต่างทางความสงูของภมูปิระเทศ(Topographic Relief)
• Plan view• Profile view• Cross-section view
101Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Topographic Relief
102Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์

Trigonometric Levelingงานระดับตรโีกณมติิท่ีรงัวดัเฉพาะมุมดิ่งสถานีเดียว • ใชเ้มื่อไมส้ามารถใชก้ล้องระดับได้จะอาศัยการวดัมุมแทน• งานต่อการทำางานสนาม• ต้องมกีารปรบัแก้อันเน่ืองจากความโค้งของโลกและการหกัเห
ของแสงด้วย• ทำาใหโ้อกาสจะเกิดความคลาดเคล่ือนมากงานระดับตรโีกณมติิท่ีรงัวดัจาก 2 สถานี (Reciprocal
Observation)• เป็นการรงัวดัท่ีเพิม่งานมากขึ้น• แต่สามารถขจดัผลกระทบอันเน่ืองมาจากความโค้งของผิวโลก
และการหกัเหของแสงลงได้

Concept of Trigonometric Leveling
• จากรูปสามเหล่ียม ได้วา่
H
SV
AB
C
HtanαV or SsinαV
Velev elev AC

A
B
งานระดับตรโีกณมติิ Trigonometric Levelingทราบค่าระดับของจุด A ต้องการหาค่าระดับท่ีจุด B
จาก: V = S sin = h tan เมื่อ hi = AD และ r = BC
elevB = elevA + hi + V – rหรอื
elevB = elevA + hi + V – r – 67D/(1000)3
C
E
D
SV
hi
(คิด Refraction and Curvature Error)

ตัวอยา่งที่ 4
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 106
a = 30o22’00”
Elev A = 361.297 m
S = 82.181 m
2 m
Elev B = ? m
A
B
hi = 1.578 mr = 2 m
a = 30o22’00”V = S Sin a
V = 82.181 Sin (- 30o22’00) m= - 45.199 m
1.578 m
ElevB = ElevA + hi + V – rElevB = 361.297+1.578 – 45.199 – 2 m
ElevB = 315.676 m

Reciprocal Trigonometric Leveling (งานระดับตรโีกณมติิแบบสอบกลับ)
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 107
/ 2/ 2
2
2
( )2
(90 / 2)2
( )2
( / 2)2
tan( )2AB
BAC c rABD c rBAC ABD BAC
BAC
BC ACSin BAC Sin ABC
Sin BACBC ACSin ABC
SinBC AC
Sin c
SinBC AC
Cos c
h BC AC
A C
BD
SAB
a
b
r
r
c/2
c/290+c/2
c
Simplify

Reciprocal Trigonometric Levelingงานระดับตรโีกณมติิแบบสอบกลับ (ต่อ)
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 108
hA
hB
A C
BD
SAB
a
b
r
r
c/2
c/290+c/2
c
ABα+βh = AC tan( )
2
aAB
hAC = (1+ ) SR
ABACh = tan α + tan β2
ABα+βh = AC ( )
2 180

ตัวอยา่งที่ 5• การรงัวดัระดับตรโีกณมติิแบบสอบกลับ (Reciprocal
Trigonometric Leveling) ระหวา่งสถานี A และ B ซึ่งอยูห่า่งกัน 9.230 เมตร ได้ขอ้มูลดังน้ี – ท่ีสถานี A วดัมุมเงยไปยงัจุด B ได้ 00o00’10”– ท่ีสถานี B วดัมุมก้มไปยงัจุด A ได้ 00o02’44” – ความสงูของการตัง้กล้องทัง้สองสถานี 1.36 เมตร – ความสงูของเป้าทัง้สองสถานี 3.65 เมตร
• จงคำานวณหาค่าต่างระดับระหวา่งจุด A และ B กำาหนดใหร้ศัมคีวามโค้งของผิวโลกเป็น 6,367 กิโลเมตร
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 109

ตัวอยา่งที่ 5 (ต่อ)
Solution• จากสตูร• ได้วา่
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 110
ABα+βh = AC tan( )
2
o o
AB00 00'10"+00 02'44"h = 9230 tan( ) = 2.897 m
2

ผลการคำานวณด้วย Mathematica 7.0
Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์ 111

จบบทที่ 4
112Slide โดย อ.ดร.ชาติชาย ไวยสรุะสงิห์
Related Documents











