㐠Ⴀጤဨ ࢩࢡጤဨ㛗 ሯᮏᙪ㸦⚄ᡞ㸧 ࢩࢡጤဨ㛗 ᑎ⏣ ດ 㸦⚄ᡞ㸪JST ࡅࡀࡁࡉ㸧 ᐇ⾜ጤဨ㛗 ᮧᑿဢ㸦❧㤋㸧 ᐇ⾜ጤဨ㛗 ᅵ⏣ಟᖹ㸦⚄ᡞ㸧 ィ Ⳣᐙᾈஅ㸦⚄ᡞ㸧 ࢸࢫࢩ ỿ ⍞ᮍ 㸦⚄ᡞ㸧 ࢢ Ώ㑓ᣅ㈗㸦⚄ᡞ㸧 ฟ∧ ᚋ⸨భ㸦ᒸᒣ㸧 ぢி㸦⚄ᡞ㸧 ᗈሗࢨࢹ ฟ⏣ ᛭ 㸦⚄ᡞ㸧 ࢼࢭࢺࢩ ⏣ኴ㑻㸦⚄ᡞ㸧 す㩗⨾㸦⚄ᡞ㸧

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
JST
2016
2016 12 23 ( ) 24 ( )
12 23 ( )
10:00 10:15
: 10:15 17:20(23 )
Session 1 10:15 11:15(4 ) : ( )
1-1. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1-2. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-3. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3
1-4. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
( : 11:15 11:20)
Session 2 11:20 12:20(4 ) : ( )
2-1. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2-2. ( ), ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
2-3. ( ), ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2-4. ( ), ( , JST ), ( )
3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
( : 12:20 13:20)
Session 3 Wi-Fi 13:20 14:05(3 ) : ( )
3-1. ( ), ( ), ( ), ( )
Wi-Fi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3-2. ( ), ( ), ( ), ( )
Wi-Fi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3-3. ( ), ( ), ( ), ( )
Wi-Fi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
( : 14:05 14:10)
Session 4 14:10 15:10(4 ) : ( )
4-1. ( )
ITS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4-2. ( ) ( ) ( )
DSMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4-3. ( ) ( ) ( ) ( )
3 ROS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4-4. ( ), ( ), ( ), ( )
BLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
( : 15:10 15:15)
Session 5 15:15 16:15(4 ) : ( )
5-1. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . .16
5-2. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5-3. ( ), ( )
Chameleon . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5-4. ( ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
( : 16:15 16:20)
Session 6 16:20 17:20(4 ) : ( )
6-1. ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6-2. ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6-3. ( ) ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6-4. ( m plus plus )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
( : 17:20 18:00)
, 18:00 19:30
20:00 23:00
12 24 ( )
: 9:00 15:50(22 )
Session 7 9:00 10:00(4 ) : ( )
7-1. ( ), ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7-2. ( ), ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
7-3. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7-4. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
( : 10:00 10:05)
Session 8 & 10:05 11:05(4 ) : ( )
8-1. ( , JSPS), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
8-2. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8-3. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
8-4. ( ), ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
( : 11:05 11:10)
Session 9 11:10 12:10(4 ) : ( )
9-1. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
9-2. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
9-3. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
9-4. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
( : 12:10 13:10)
Session 10 13:10 13:55(3 ) : ( )
10-1. ( ), ( , JST ), ( )
: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
10-2. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37

10-3. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
( : 13:55 14:00)
Session 11 14:00 15:00(4 ) : ( )
11-1. ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
11-2. ( ), ( ), ( , JST ), ( )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
11-3. ( ), ( , JST ), ( )
HMD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
11-4. ( ), ( , JST ), ( )
HMD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
( : 15:00 15:05)
Session 12 2 15:05 15:50(3 ) : ( )
12-1. ( )
FESTIVAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
12-2. ( JST )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
12-3. ( )
2016 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
15:50 16:05

赤外線センサを用いた眼球運動計測による睡眠段階の判定手法
松井 駿 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的睡眠は 1日の約 3分の 1を占めるといわれており,脳・心・
身体の疲れを癒して,ヒトは次の日の活動に備えている.より良い睡眠をとるためには,睡眠解析をして睡眠ステージ(睡眠の深さ)を知ることが必要である.睡眠解析の手法として,国際的基準である Rechtschaffen & Kales法があるが,多数のセンサ・電極を使用し被験者に大きな負担がかかり,また解析に専門的な知識を要する.日常的に睡眠ステージを計測する手法としてパルスオキシテレメータ [1]や赤外線モーションセンサ [2]を用いる手法があるが,前者は通常の就寝時には身に付けない腕時計型デバイスによる違和感があり,後者は計測環境が限定される.一方,浅い睡眠であるRapid Eye Movement (REM)睡眠時には眼球運動が起こるという特徴が知られている.そこで,本研究では就寝時に身に付けても違和感がなく,持ち運びができ外出先での仮眠にも対応したアイマスクに着目し,睡眠時の眼球運動から睡眠ステージを測定する手法を提案する.
2 提案システム図 1にシステム構成を示す.システムは,PC,マイコン,
フォトリフレクタから構成され,フォトリフレクタで計測したセンサデータをマイコンで測定し,無線で PC に送信する.睡眠時における眼球運動の計測にはフォトリフレクタを使用し,アイマスクに対して眼球を覆うように 4×5の格子状に配置し取り付けた.また,シフトレジスタによって高速にフォトリフレクタの各列への電源を切り替えることによって,すべてのフォトリフレクタの生データを約 10Hzで取得している.隣接するフォトリフレクタの距離は約 0.5cmで,基板の大きさは 4.7cm×5.9cm,そのうちフォトリフレクタが占める面積は 2.5cm×3.3cmである.フォトリフレクタを細かく敷き詰めることで,微細な眼球の動きを認識可能である.フォトリフレクタは反射した赤外線の量により出力電圧が変化するので,眼球の動きによりフォトリフレクタとまぶたの距離が変化し,出力電圧として反映される.
3 睡眠段階の判定手法眼球下部に位置する 3つのフォトリフレクタの出力電圧か
ら分散値を算出しその合計値を正規化し特徴量として抽出する.特徴量に対して閾値を設定し,特徴量が閾値を上回っているか否かの 2値で睡眠段階を判定する.その後,一定区間の認識結果の多数決を取る処理を行う.この処理では,590
サンプル (24分)中に REM と判定されたサンプル数が 170
サンプル以上であれば REM と判定しそれ以下なら NREM
と判定する.
4 評価実験提案システムの有用性を確かめるため,睡眠時の眼球運動を認識するためのプロトタイプデバイスを作製し,評価実験を行った.被験者は筆者 1名であり,健康的な状態で 5 日間で合計約 25 時間の睡眠を行い,提案システムにより眼球運動を測定した.また,同時に東芝体動計 NEM-T1 により正解データを測定した.この体動計は腕時計型のデバイスであり,睡眠時の脈波間隔と体動量を計測することにより,睡眠段階を判定している.提案手法の認識率を表 1に示す.結
図 1: システム構成
表 1: 提案手法における認識率
日数 1日目 2日目 3日目 4日目 5日目 平均
認識率 [%] 85.2 88.6 71.0 86.4 81.5 81.6
NREM
REM
NREM
REM
�����
0 1 2 3 4
��
���
��
�
図 2: 1日目における提案手法の認識結果と正解データ
果は,平均で認識率 81.6%となった.提案手法の認識結果の一例とその正解データを図 2に示す.図 2からは,REM睡眠とNREM睡眠の大まかなサイクルを認識することができたといえる.また最大で 88.6%となり高い精度で認識できたが,最小で 71.0%となった.認識率の低い結果では,全てのREMとNREMのサイクルを認識することができなかった.原因としては,閾値処理する前の正規化に問題があると考えられる.
5 まとめと今後の課題本研究では,睡眠段階における眼球運動の変化に着目し,睡眠時の眼球運動から睡眠段階を判定可能なシステムを設計し,実装した.眼球運動を測定するためにフォトリフレクタをアイマスクに取り付け,違和感なく測定可能で持ち運びのできる睡眠段階判定デバイスのプロトタイプを作製した.プロトタイプデバイスにより測定したデータを閾値により2値で処理した結果,平均 81.6%となった.今後の課題としては,被験者を増やし,個人間の特性についても評価する.NREM睡眠には段階が 4段階に分かれており,その段階別に記憶の種類など睡眠の効果が変わる.そのため,睡眠段階を 3段階 (REM睡眠・浅睡眠・深睡眠)で判定し,詳細な睡眠段階の判定を行う予定である.また,睡眠状態を利用したアプリケーションを実装する.
参考文献[1] 福山ら: パルスオキシテレメトリによる REM 睡眠期の検出, 電気関係学会九州支部連合大会公演論文集, 01-
1p-15 (Sep. 2008)
[2] 城ら: 赤外線モーションセンサを用いた睡眠時体動の評価, 生体医工学: 日本エム・イー学会誌, Vol. 47, No. 1,
pp. 7–14 (Feb. 2009)
鼻腔情報を用いた状況認識手法の実現に向けて
小玉亮輔 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年のコンピュータ小型化に伴い,身体の各部位に装着し
た小型センサを用いたユーザの状況認識技術に注目が集まっている.身体部位の中でも鼻は身体のバイタルサインの一つである呼吸や自律神経の支配を受ける鼻づまりから,健康状態などの身体的な情報や心理的な情報を取得できる可能性がある.鼻から得られる情報を用いた研究として,鼻部皮膚温度を利用したストレス評価システム [1]があるが,外鼻ではなく,鼻腔から得られる情報を利用した研究は少ない.そこで,本研究では,鼻腔から得られる情報を用いた状況認識手法を提案する.本稿では,鼻腔情報を用いた状況認識手法の実現に向けて,鼻の最も基本的な機能である呼吸のセンシングを目的とする.
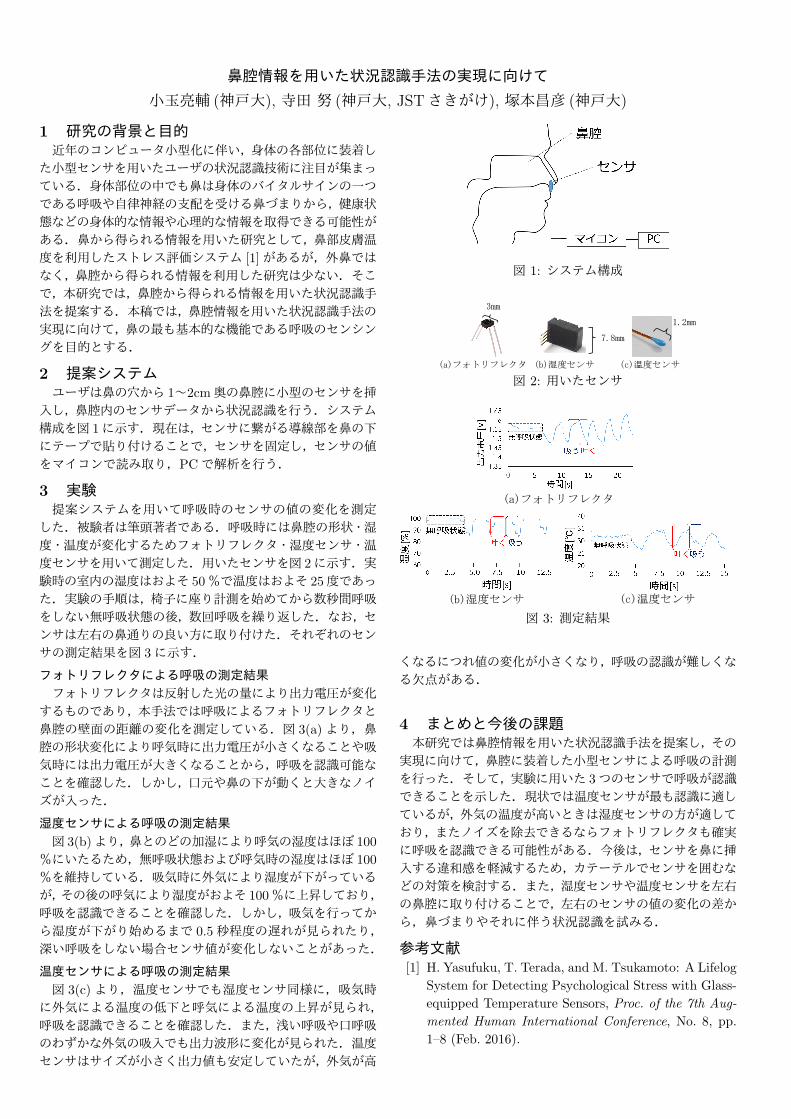
2 提案システムユーザは鼻の穴から 1~2cm奥の鼻腔に小型のセンサを挿
入し,鼻腔内のセンサデータから状況認識を行う.システム構成を図 1に示す.現在は,センサに繋がる導線部を鼻の下にテープで貼り付けることで,センサを固定し,センサの値をマイコンで読み取り,PCで解析を行う.
3 実験提案システムを用いて呼吸時のセンサの値の変化を測定
した.被験者は筆頭著者である.呼吸時には鼻腔の形状・湿度・温度が変化するためフォトリフレクタ・湿度センサ・温度センサを用いて測定した.用いたセンサを図 2に示す.実験時の室内の湿度はおよそ 50%で温度はおよそ 25度であった.実験の手順は,椅子に座り計測を始めてから数秒間呼吸をしない無呼吸状態の後,数回呼吸を繰り返した.なお,センサは左右の鼻通りの良い方に取り付けた.それぞれのセンサの測定結果を図 3に示す.
フォトリフレクタによる呼吸の測定結果フォトリフレクタは反射した光の量により出力電圧が変化
するものであり,本手法では呼吸によるフォトリフレクタと鼻腔の壁面の距離の変化を測定している.図 3(a)より,鼻腔の形状変化により呼気時に出力電圧が小さくなることや吸気時には出力電圧が大きくなることから,呼吸を認識可能なことを確認した.しかし,口元や鼻の下が動くと大きなノイズが入った.
湿度センサによる呼吸の測定結果図 3(b)より,鼻とのどの加湿により呼気の湿度はほぼ 100
%にいたるため,無呼吸状態および呼気時の湿度はほぼ 100
%を維持している.吸気時に外気により湿度が下がっているが,その後の呼気により湿度がおよそ 100%に上昇しており,呼吸を認識できることを確認した.しかし,吸気を行ってから湿度が下がり始めるまで 0.5秒程度の遅れが見られたり,深い呼吸をしない場合センサ値が変化しないことがあった.
温度センサによる呼吸の測定結果図 3(c)より,温度センサでも湿度センサ同様に,吸気時
に外気による温度の低下と呼気による温度の上昇が見られ,呼吸を認識できることを確認した.また,浅い呼吸や口呼吸のわずかな外気の吸入でも出力波形に変化が見られた.温度センサはサイズが小さく出力値も安定していたが,外気が高
図 1: システム構成
���
�����
�����
��� ����� ������� �������
図 2: 用いたセンサ
���������
���� ��� ���� ���
図 3: 測定結果
くなるにつれ値の変化が小さくなり,呼吸の認識が難しくなる欠点がある.
4 まとめと今後の課題本研究では鼻腔情報を用いた状況認識手法を提案し,その実現に向けて,鼻腔に装着した小型センサによる呼吸の計測を行った.そして,実験に用いた 3つのセンサで呼吸が認識できることを示した.現状では温度センサが最も認識に適しているが,外気の温度が高いときは湿度センサの方が適しており,またノイズを除去できるならフォトリフレクタも確実に呼吸を認識できる可能性がある.今後は,センサを鼻に挿入する違和感を軽減するため,カテーテルでセンサを囲むなどの対策を検討する.また,湿度センサや温度センサを左右の鼻腔に取り付けることで,左右のセンサの値の変化の差から,鼻づまりやそれに伴う状況認識を試みる.
参考文献[1] H. Yasufuku, T. Terada, and M. Tsukamoto: A Lifelog
System for Detecting Psychological Stress with Glass-
equipped Temperature Sensors, Proc. of the 7th Aug-
mented Human International Conference, No. 8, pp.
1–8 (Feb. 2016).
口周辺の形状変化によるコンテキスト認識手法の提案山下将平 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年,ウェアラブルデバイスが流行の兆しを見せており,
その中でもメガネ型や腕時計型のデバイスを用いて装着者の日々の心拍数や歩数等を計測するライフログを主な用途としたものが多くある.しかし,そういったデバイスの中に口周辺の動きについて記録しているものは少ない.口周辺の動きによって得られる情報の例を挙げると,表情筋に現れる感情,食事中の咀嚼,会話の内容等,様々なものが存在する.そこで,筆者はウェアラブルデバイスとして口周辺の動きによる情報を認識することに注目した.先行研究にカメラによる発話検出 [1],筋電センサによって咀嚼時の口の動きを認識 [2]するものがあるが,これらは使用状況が限られ,外乱の影響を受けやすく,日常生活での使用には適さない.そこで本研究では,付け髭型デバイスを用いた口周辺の形状変化によるコンテキスト認識手法を提案する.髭は口周辺にあり,付け髭型デバイスは特殊なデバイスよりユーザの見た目を損なわず,また,マスク型のデバイスとは異なり,口をデバイスが覆っていないので飲食時に着脱する必要が無く,表情が客観的に見にくくならない.デバイスのセンサには導電布を用いた.導電布は他のセンサと比較して薄型で肌に固定しやすく,付け髭と併せて使用することができる.
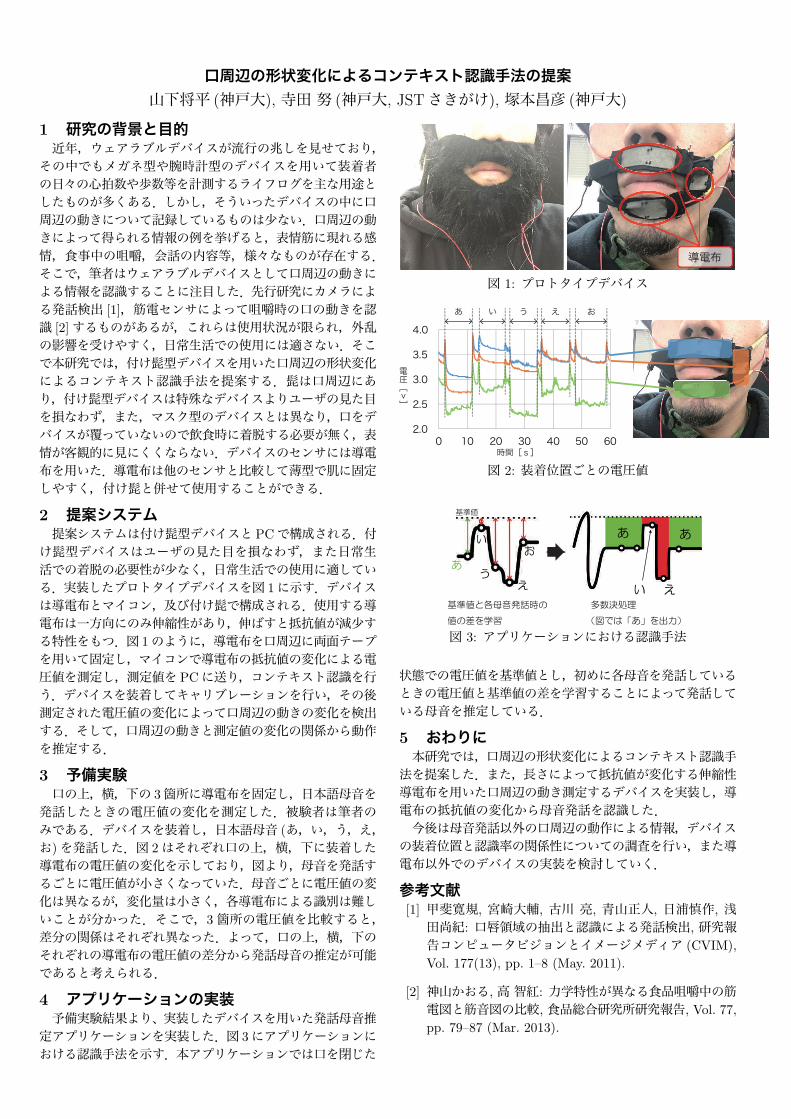
2 提案システム提案システムは付け髭型デバイスと PCで構成される.付
け髭型デバイスはユーザの見た目を損なわず,また日常生活での着脱の必要性が少なく,日常生活での使用に適している.実装したプロトタイプデバイスを図 1に示す.デバイスは導電布とマイコン,及び付け髭で構成される.使用する導電布は一方向にのみ伸縮性があり,伸ばすと抵抗値が減少する特性をもつ.図 1のように,導電布を口周辺に両面テープを用いて固定し,マイコンで導電布の抵抗値の変化による電圧値を測定し,測定値を PCに送り,コンテキスト認識を行う.デバイスを装着してキャリブレーションを行い,その後測定された電圧値の変化によって口周辺の動きの変化を検出する.そして,口周辺の動きと測定値の変化の関係から動作を推定する.
3 予備実験口の上,横,下の 3箇所に導電布を固定し,日本語母音を
発話したときの電圧値の変化を測定した.被験者は筆者のみである.デバイスを装着し,日本語母音 (あ,い,う,え,お)を発話した.図 2はそれぞれ口の上,横,下に装着した導電布の電圧値の変化を示しており,図より,母音を発話するごとに電圧値が小さくなっていた.母音ごとに電圧値の変化は異なるが,変化量は小さく,各導電布による識別は難しいことが分かった.そこで,3箇所の電圧値を比較すると,差分の関係はそれぞれ異なった.よって,口の上,横,下のそれぞれの導電布の電圧値の差分から発話母音の推定が可能であると考えられる.
4 アプリケーションの実装予備実験結果より、実装したデバイスを用いた発話母音推
定アプリケーションを実装した.図 3にアプリケーションにおける認識手法を示す.本アプリケーションでは口を閉じた
導電布
図 1: プロトタイプデバイス
電圧﹇v﹈
時間[s]時間[s]
2.0
2.5
3.0
3.5
4.0
0 10 20 30 40 50 60
あ い う え お
図 2: 装着位置ごとの電圧値
図 3: アプリケーションにおける認識手法
状態での電圧値を基準値とし,初めに各母音を発話しているときの電圧値と基準値の差を学習することによって発話している母音を推定している.
5 おわりに本研究では,口周辺の形状変化によるコンテキスト認識手
法を提案した.また,長さによって抵抗値が変化する伸縮性導電布を用いた口周辺の動き測定するデバイスを実装し,導電布の抵抗値の変化から母音発話を認識した.今後は母音発話以外の口周辺の動作による情報,デバイス
の装着位置と認識率の関係性についての調査を行い,また導電布以外でのデバイスの実装を検討していく.
参考文献[1] 甲斐寛規, 宮崎大輔, 古川 亮, 青山正人, 日浦慎作, 浅田尚紀: 口唇領域の抽出と認識による発話検出, 研究報告コンピュータビジョンとイメージメディア (CVIM),
Vol. 177(13), pp. 1–8 (May. 2011).
[2] 神山かおる, 高 智紅: 力学特性が異なる食品咀嚼中の筋電図と筋音図の比較, 食品総合研究所研究報告, Vol. 77,
pp. 79–87 (Mar. 2013).

メガネ型デバイスを用いた経皮水分蒸散量の常時測定手法の提案
田中洸平 (神戸大), 寺田 努 (神戸大, JST さきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的皮膚の状態の診断は,はりやカサつき,色による経験的診
断だけでなく,経皮水分蒸散量などの定量的な指標が用いられる.経皮水分蒸散量は体内から無自覚のうちに角質層を通じて揮散する水分量のことであり,汗とは区別される.肌荒れし,バリア機能が損なわれた皮膚では正常な皮膚に比べ経皮水分蒸散量は大きくなるので,経皮水分蒸散量は皮膚バリア機能の指標となる.肌の状態を定量的に測定し,保湿などの適切な対処を行うことで,肌荒れなどの皮膚症状の治療や予防ができる.皮膚は環境と生体の境界であり気温や湿度といった気象
要素の変化に敏感に反応する.例えば,エアコンなどによる乾燥の影響を受け,経皮水分蒸散量が大きくなる.藤田らは人工気象室を用いた実験で,皮膚は気温・湿度・不快指数・飽差といった気象要素の影響を受けることを確認している[1].しかし,化粧や行動などの気象要素以外の影響を受ける条件での常時計測は行われていないため,常時計測を行う必要がある.経皮水分蒸散量の測定方法は中央の開いた円筒形のチャンバーを測定部位にあて測定する開放系と,密閉式のプローブを測定部位にあて測定する閉鎖系があり,近年では小さく待ち時間なしで連続した測定が可能な Tewameter
TM300などの開放系の測定器が用いられることが多い.現在用いられている測定機器では常時測定はできないため,実環境での測定には適していない.そこで本研究では,経皮水分蒸散量と気温・湿度・紫外線量を常時測定手法を提案し,プロトタイプを実装,経皮水分蒸散量の変化を検出できるか調査するための実験を行った.
2 提案システム提案手法で用いるデバイスを図 1に示す.デバイスは温湿
度センサ (AM2321)3個,紫外線センサ (G5842,G6262)2個,Arduino Nanoで構成されている.デバイスは常時測定に適したメガネ型を採用し,Arduino Nanoに接続した SDカードにデータを記録する.また,ユーザの見た目を損わない社会性を考慮し測定部位はこめかみにした.アクリル製のチャンバー内部に 2個を温湿度センサが 5mm間隔で配置し,チャンバーと測定部位が接触するようにチャンバーをメガネに接着した.気温より飽和水蒸気量を求め湿度を乗算することで,2個の温湿度センサそれぞれの位置での水蒸気量が計算できる.2個のセンサの位置での水蒸気量の差を∆[g/m3]
と定義する.物質の拡散に関する基本法則であるフィックの法則は,皮膚の表面から蒸発する水分の拡散に適用でき,∆より経皮水分蒸散量 [g/(m2 · h)]を算出できると考えられる.1個の温湿度センサは環境の温湿度を測定,紫外線センサは環境の紫外線量・ブルーライト量を測定し,気象要素と経皮水分蒸散量の関係を調べる.
3 予備実験セロハンテープなどを用いて皮膚から角質層を取り除く
テープストリッピングを行うと皮膚のバリア機能が損なわれ経皮水分蒸散量が大きくなる.実験では提案デバイスを用いてテープストリッピング前後で∆の値が変化するかを調査した.被験者は気温: 22℃,湿度:38~40%の部屋で測定部位
図 1: デバイス
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 200 400 600 800
(g/m
3)
(s)
図 2: テープストリッピング
前の∆の時間推移
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 200 400 600 800
(g/m
3)
(s)
図 3: テープストリッピング
後の∆の時間推移
0.00
0.20
0.40
0.60
0.80
1.00
before a er
(g/m
3)
図 4: ストリッピング前後の
∆の変化
を露出し,10分間安静にした状態で待機させた後に測定を行った.測定時間は 3分,測定間隔を 30秒空け 5回の測定を行った.測定と測定の間ではデバイスを着脱した.テープストリッピングを行った後,同様に測定を行なった.測定はいずれもサンプリング間隔 5秒で行った.被験者は 20代の男性 1名である.テープストリッピング前後の∆の時間変化を図 2,図 3に示す. 測定時間の 3分間のうち最も安定であった 30秒の∆
の平均値を測定結果とした.テープストリッピング前の 4回目の測定では,センサの外れ値が多く検出され正確な測定結果を得ることができなかった.テープストリッピング前の 4
つのデータとテープストリッピング後の 5つのデータ,それぞれ平均と標準誤差を図 4に示す.t検定の結果,テープストリッピング前後での∆の値は p=0.01(<0.05)で有意な差があり,∆はテープストリッピング後の方が大きくなることがわかった.テープストリッピングを行うと経皮水分蒸散量が上昇することと同様に∆が上昇したため,提案デバイスを用いて経皮水分蒸散量が測定できると考えられる.
4 まとめと今後の課題本研究では,チャンバー内の水蒸気量を常時測定するメガネ型デバイスを提案し,チャンバー内の 2つのセンサの水蒸気量の差∆がテープストリッピング前後で変化するか測定する実験を行い,∆がテープストリッピング後の方が有意に大きくなることが確認できた.今後,気象要素を変化させたときの測定機器が示す経皮水分蒸散量と提案デバイスの ∆
の比較を行い,∆から経皮水分蒸散量を求める.また,実環境で化粧や行動などの気象要素以外の要素の皮膚への影響や,気象要因以外の要因が含まれた場合の気象要因の影響について明らかにする必要がある.
参考文献[1] 藤田友香, 山本 享, 田村照子, 福岡義隆: 皮膚に及ぼす気象要素の影響 -夏季・秋季について-, 地球環境研究, Vol. 10, pp. 49–67 (2008).
加速度センサ付きシャワーヘッドを用いた浴室内行動認識手法の提案
西垣佑介 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年ライフログに注目が集まっており,家具や身の回りの
物にセンサを取り付けてライフログを行うアプリケーションの開発が盛んである.ライフログデータを取得するデバイスの例としてスマートフォンや腕時計型のウェアラブルデバイスが挙げられるが,水場である浴室においては防水性の観点から使用できるデバイスが限られる.また,これらはユーザが常に身に着けることを前提としているため,何も身に着けない浴室においては実用的でない.そのため浴室内におけるライフログに関する研究事例は多くない.しかし,浴室内におけるライフログではシャワーの使用水量や入浴時間といった情報や,体重や心拍などの生体情報を取得できると考えられる.本研究では,センシング技術を用いて浴室内においてユー
ザが行っている動作の識別を行う.本稿では「髪を洗っている」,「身体を洗っている」といったユーザの動作を識別する.動作識別を行うにあたり,シャワー利用が阻害されないようにできるだけ普段から行う動作を利用して識別することが望ましい.本研究では,浴室利用者の多くが使用するシャワーヘッドの動きを計測し,人の動きを識別することを目指す.これにより,水の無駄遣いを通知したり洗い残しを検出したりすることに繋がると考えられる.大西ら [1]はシャンプーボトルなどの浴室内物品に RFIDタグとリーダーを設置することでユーザが使用する物品を検出し,物品を取る組合せや順番から何をしているかを推定した.この手法では浴室内のあらゆる物品に予めタグを設置することが手間であり,持ち込みのシャンプーや洗面器具などがある場合には不向きである.また浴室内の動作識別を行う上で,プライバシーの面からカメラなどの使用は不適切である.そこで本稿では,シャワーヘッドに加速度・角速度センサを取り付けることでシャワーヘッドの動きを計測し,浴室内の動作識別を行う手法を提案する.
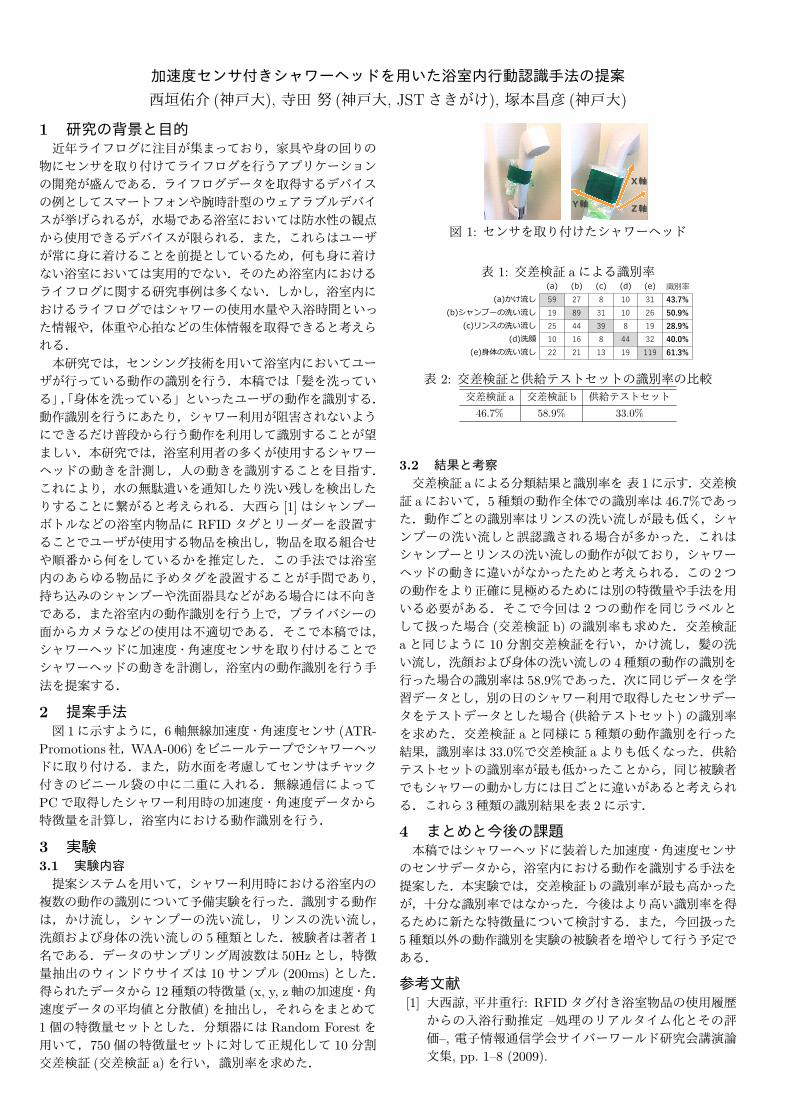
2 提案手法図 1に示すように,6軸無線加速度・角速度センサ (ATR-
Promotions社,WAA-006)をビニールテープでシャワーヘッドに取り付ける.また,防水面を考慮してセンサはチャック付きのビニール袋の中に二重に入れる.無線通信によってPCで取得したシャワー利用時の加速度・角速度データから特徴量を計算し,浴室内における動作識別を行う.
3 実験3.1 実験内容提案システムを用いて,シャワー利用時における浴室内の
複数の動作の識別について予備実験を行った.識別する動作は,かけ流し,シャンプーの洗い流し,リンスの洗い流し,洗顔および身体の洗い流しの 5種類とした.被験者は著者 1
名である.データのサンプリング周波数は 50Hzとし,特徴量抽出のウィンドウサイズは 10サンプル (200ms)とした.得られたデータから 12種類の特徴量 (x, y, z軸の加速度・角速度データの平均値と分散値)を抽出し,それらをまとめて1個の特徴量セットとした.分類器には Random Forestを用いて,750個の特徴量セットに対して正規化して 10分割交差検証 (交差検証 a)を行い,識別率を求めた.
��
��
��
図 1: センサを取り付けたシャワーヘッド
表 1: 交差検証 aによる識別率��� ��� ��� ��� ���
���かけ流し �� �� � �� �� �����
���シャンプーの洗い流し �� �� �� �� � �����
���リンスの洗い流し �� �� � �� ���
���� �� � � �� �����
���⾝体の洗い流し �� �� �� �� ��� �����
識別率
表 2: 交差検証と供給テストセットの識別率の比較交差検証 a 交差検証 b 供給テストセット
46.7% 58.9% 33.0%
3.2 結果と考察交差検証 aによる分類結果と識別率を表 1に示す.交差検証 aにおいて,5種類の動作全体での識別率は 46.7%であった.動作ごとの識別率はリンスの洗い流しが最も低く,シャンプーの洗い流しと誤認識される場合が多かった.これはシャンプーとリンスの洗い流しの動作が似ており,シャワーヘッドの動きに違いがなかったためと考えられる.この 2つの動作をより正確に見極めるためには別の特徴量や手法を用いる必要がある.そこで今回は 2つの動作を同じラベルとして扱った場合 (交差検証 b)の識別率も求めた.交差検証aと同じように 10分割交差検証を行い,かけ流し,髪の洗い流し,洗顔および身体の洗い流しの 4種類の動作の識別を行った場合の識別率は 58.9%であった.次に同じデータを学習データとし,別の日のシャワー利用で取得したセンサデータをテストデータとした場合 (供給テストセット)の識別率を求めた.交差検証 aと同様に 5種類の動作識別を行った結果,識別率は 33.0%で交差検証 aよりも低くなった.供給テストセットの識別率が最も低かったことから,同じ被験者でもシャワーの動かし方には日ごとに違いがあると考えられる.これら 3種類の識別結果を表 2に示す.
4 まとめと今後の課題本稿ではシャワーヘッドに装着した加速度・角速度センサのセンサデータから,浴室内における動作を識別する手法を提案した.本実験では,交差検証 bの識別率が最も高かったが,十分な識別率ではなかった.今後はより高い識別率を得るために新たな特徴量について検討する.また,今回扱った5種類以外の動作識別を実験の被験者を増やして行う予定である.
参考文献[1] 大西諒, 平井重行: RFIDタグ付き浴室物品の使用履歴からの入浴行動推定 –処理のリアルタイム化とその評価–, 電子情報通信学会サイバーワールド研究会講演論文集, pp. 1–8 (2009).

圧力センサとモーションセンサを用いたドア開閉動作に基づく個人識別システム
石田 茜 (神戸大), 村尾和哉 (立命館大), 寺田 努 (神戸大, JST さきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的家庭など,人が日常的に利用する場所では,部屋の出入り
や家電の利用が利用者の行動を記録する指標のひとつになる.人の屋内の移動を検出する研究として,スマートウォッチから得られる加速度データを用いる手法が提案されている[1]が,室内でデバイスを外している場合も多く実用性に欠ける.建物や部屋への入退室や家電の利用にはドアの開閉を伴うことが多いため,ドアの開閉動作から個人識別を行うことで屋内での部屋単位の位置推定が実現できると考えられる.筆者らはこれまでに,冷蔵庫ドアに設置した圧力センサおよびモーションセンサを用いたドアの開閉動作による個人識別手法を提案し,日常生活において実験を行っている.本稿では,家庭や職場においてよく見られる 3種類のドアに圧力センサおよびモーションセンサを設置し,提案システムにおけるドアの種類による個人識別性能を調査する.
2 システム概要本稿では冷蔵庫ドアに代表されるマグネットタイプ,現在
の住宅で主流であるレバータイプ,トイレ等の共用スペースに多く見られるバータイプの 3種類のドアを使用する.ドアを使用する際に最も力が加えられると考えられる部分に圧力センサ(Pressure Profile System社,型番 5420)を,手の軌跡と同様の軌跡を描くと考えられる部分にモーションセンサ(ATR-Promotions 社,TSND121)を設置した.圧力センサは 12点で圧力を取得できるシート状のものを 2枚使用した.提案システムではこれらのセンサを用いてドア開閉時のセンサデータを取得し,合計 16種類の特徴量を計算し,個人識別を行う.以下に,各ドアへの提案システムの具体的な設置方法を述べる.
2.1 マグネットタイプドア図 1に示すように,ドア上部の左端に位置するドアハンド
ル部に圧力センサを 2枚繋げて設置し,168mmの範囲で圧力を取得する.ドア側部にモーションセンサを設置する.使用したドアの開閉軸は右で,ドアを引いて利用する.
2.2 レバータイプドア図 2に示すように,ドアのレバーの末端を一端として,表
と裏それぞれに 1枚ずつ圧力センサを設置し,84mmの範囲2箇所で得られる圧力を取得する.レバー上部にモーションセンサを設置する.ユーザはレバーをおよそ 30度傾けるとドアを開けることができる.使用したドアの開閉軸は右で,ドアを押して利用する.
2.3 バータイプドア図 3に示すように,ドア上部から 55mmの点を一端として,
バーに沿うように圧力センサを 2枚繋げて設置し,168mm
の範囲で圧力を取得する.バー直下にモーションセンサを設置する.使用したドアは開閉軸が右および左の二種類で,どちらもドアを押して利用する.
3 評価実験日常環境での部屋の出入りおよび家電の利用における個人
識別性能を調査するため,3種類のドアに提案手法を実装し,評価実験を行った.被験者はマグネットタイプドアおよびレバータイプドアで 8名,バータイプドアでは回転軸が右およ
�����
��� ��
図 1: マグネットタイプ
�����
�� ��
図 2: レバータイプ
�����
������
��� ��
図 3: バータイプ(左軸)
表 1: 実験結果
識別した マグネット レバー バータイプ
被験者数 タイプ タイプ 右軸 左軸
8名 89.8% 82.6% - -
4名 - 83.5% 92.8% 94.8%
び左のドアのそれぞれを 4名ずつとし,3種類のドアに関して一人あたりそれぞれ 100回ずつの開閉動作を行った.実験では被験者はドア開閉時はセンサの設置範囲を握るように指示したが,握り方は自由とした.評価には Random Forest
で,10分割交差検証により行った.結果を表 1に示す.
4 考察マグネットタイプとレバータイプの結果を比較すると,同
じ被験者 8名において,それぞれ 89.8%および 82.6%であった.また,レバータイプとバータイプの結果を比較すると,同じ被験者 4名において,レバータイプでは 83%,バータイプでは 92%と大きな違いが見られた.レバータイプではドアレバーを傾ける動作を伴うため個人差が見られると考えていたが,動作を必要としないマグネットタイプおよびバータイプの方が識別精度が高かった.これは,バータイプのドアは握ることのできる範囲が広く,バーを握る際の自由度が高いため,握る範囲の大きさが結果に影響したと考えられる.
5 まとめ本稿では 3種類のドアに設置した圧力センサとモーション
センサを用いてドアの種類による個人識別性能の違いを調査した.今後は,生活環境での個人識別精度の評価および室内での位置・行動推定を行う.
参考文献[1] S. Lee, et. al.: Non-obstructive room-level locating
system in home environments using activity finger-
prints from smartwatch, Proc. of UbiComp 2015, pp.
939–950 (Sep. 2015).

トイレットペーパの回転に基づく個人識別システムの実環境評価
倉橋真也 (神戸大), 村尾和哉 (立命館大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的トイレは毎日使用する空間であり,さらに排泄物から尿糖
値などの健康と密接に関わる情報を得られる可能性を考慮すると,健康管理のためのライフログに適した環境であると考えられる.実際に健康管理に有用な情報である「尿糖値」「血圧」「深部体温」「体重」を自動測定するトイレ [1]が開発された.このトイレではデータを個人ごとに記録するために,毎回のデータ記録時にトイレに備え付けられたパネルを操作して IDを入力する必要がある.ユーザ情報の手入力は本来トイレを使用する際には不要な操作であるため,ユーザにとって面倒であり,忘れられることも考えられる.そこで,これまでに筆者らはトイレットペーパの巻き取り方の特徴に基づいてトイレの使用者を識別する手法を提案している [2].本稿ではこのシステムの実環境における評価について述べる.
2 提案システム本研究で提案するシステムでは,樹脂製の円柱型のアタッ
チメントの中央に角速度センサを取り付け,それをトイレットペーパの芯に設置することでペーパの回転をセンシングする.提案システムはまずはじめに,センサから得られた角速度を用いて単位時間にペーパを巻き取る長さ(巻取り速度)を算出する.得られた巻取り速度の変化から巻取り開始と巻取り終了を検出し,トイレットペーパを引き出してから切り取るまでの一回の巻取り動作のデータを切り出す.切り出したデータから巻取り速度の平均値や分散値など 5つの特徴量を算出し,事前に登録している巻取り動作のデータ(学習データ)と比較することでユーザを識別する.一回のトイレの間に複数回の巻取り動作が行なわれた場合,それらに対する識別結果を総合して一回のトイレのユーザを識別する.
3 実環境における評価実験実環境における提案システムの有効性を検証する実験を行
なった.一ヶ月間,トイレの利用者が多いと考えられる昼から夕方の時間帯に,筆者らの研究室に最寄りの男子トイレの個室に前述の角速度センサを取り付けたトイレットペーパを設置し,21~28歳の研究室の男子学生 13名から実際にトイレを利用した際の巻取り動作のデータを取得した.実際のトイレ利用者を明らかにするために,被験者にはトイレに行った後に使用時刻を報告してもらった.得られたデータに対して,あらかじめ登録しておいた 13人それぞれの 20回分の巻取り動作の学習データをもとに個人識別を行なった.評価は 1回の巻取り動作のみで識別する場合と,1回のトイレ使用で行われた複数回の巻取り動作から識別する場合それぞれについて行なった.識別対象人数が変化するにつれてどのように精度が変化するかを確認するため,評価では識別対象の被験者集合を 2~13人で変化させる.13人から識別対象人数 xの被験者を選ぶ組み合わせ 13Cx通りすべてについて識別率を評価し,平均の精度を算出した.図 1に識別対象人数に対する平均識別率を,単体の巻取り
に基づく識別手法,複数回の巻取りに基づく識別手法それぞれについて示す.複数回の巻取りに基づく手法の精度が単体の巻取りに基づく手法の精度を上回っていることから,複数回の巻取りに基づく手法の有効性が確認できた.複数回の巻
�
���
���
���
���
���
���
��
��
���
�
� � � �� ��
平
均
識
別
率
�
�
�
識別対象の⼈数 ���
単体の巻取りによる識別
複数回の巻取りによる識別
図 1: 実環境実験の識別対象人数に対する平均識別率
������
������
������
������
����
����
������
������
����
������
�����
������
�����
�����
������
�����
������
������
������
������
�������
�������
�
���
���
���
���
���
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
累
積
�
�
�
相
対
度
数
個⼈識別率 ���
頻度
累積 �
図 2: 実環境で 5人から 1人を識別する際の個人識別率
き取りによる識別ではすべての識別対象人数において 50%以上の精度を実現している.ここで 5人家族を想定して,識別対象が 5人のときの全組み合わせ 13C5=1287通りの複数回の巻取りによる識別の識別率のヒストグラムを 2に示す.平均識別率は 69.2%,標準偏差は 11.5%,最小値は 33.3%,最大値は 93.3%となった.なお単体の巻取りによる識別での結果は平均識別率は 61.2%,標準偏差は 11.7%,最小値は25.0%,最大値は 89.1%であった.図 2に示した累計度数からわかるように,9割の組み合わせにおいて 50%以上の精度を得ることができた.
4 おわりに本稿ではトイレットペーパの巻取り方の特徴に基づくユー
ザ使用者システムを提案し,実環境における評価を行なった.評価の結果,5人から 1人識別する場合平均 69.2%の精度で識別できることを確認した.今後は提案システムを実際に運用しながらオンライン学習することで精度がどのように変化するかを評価する.
参考文献[1] インテリジェンストイレ II:
https://www.daiwahouse.co.jp/release/
20081224111714.html
[2] 倉橋真也, 村尾和哉, 寺田努, 塚本昌彦: トイレットペーパの回転に基づくトイレ使用者識別手法, DICOMO2015
論文集, pp. 1217-1225 (July 2015).

3次元物理シミュレーションを用いた引き出し内の片付け配置のリアルタイム評価システム
古田達彦 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的片付けは日常生活や社会で生きていく上で重要なスキル
であり,片付けができない人は他人にだらしない,仕事ができないといった悪いイメージをもたれてしまう.片付けの中でも引き出しへの片付けに注目すると,スペースを無駄にしてしまい全てのものを詰め切れなかったり,よく使うものを奥に片付けてしまい,取り出す際に他のものは邪魔になって取り出しにくいなど様々な問題点が考えられる.そこでこれまでに筆者らは,片付けるものを登録して,ユーザに引き出しへの適切な片付け方法を提示するシステムを提案している [1].しかし,従来のこのシステムではユーザー指定の条件に最も適切な片付け配置を 1つ表示するのみであり,提示された配置を少し変えて更に自分好みのものにしたり,ものを動かしたときにそれぞれの評価値がどのように変化するのかを知ることができない.これではユーザはシステムに従って片付けるのみであり,細かい好みを反映できず,片付けにおいて必要なことが何なのかも考えられない.また,実際に片付けをした上で引き出しを開け閉めするとき,どの程度ものが動き,配置が崩れるかも考慮できない.そこで本稿では,各々のものの位置を変化させながら片付
け配置をリアルタイムに評価できるシステムを提案し,3次元物理シミュレーションを用いて実装する.物理シミュレーションを用いることにより,引き出し開閉時のものの動きも再現できるようになり,従来システムでは実現できなかった評価値「配置の乱れやすさ」を新たに実装する.なお本稿では簡単化のため,片付けるものは直方体状のもののみを扱う.
2 従来システム筆者らの従来研究 [1]では,片付けるものの画像,大きさ,
名前,使用頻度,グループ名 (例:本,調理器具)などの情報を登録し,それらのものの片付け配置図を PC画面に表示するシステムを構築した.様々な片付けの条件を反映させるため,使用頻度,グループ,容量,上からの見やすさの 4つについて点数化した.使用頻度:手軽にものを取り出しやすい引き出しの手前には使用頻度の高いものを,ものを取り出すのに時間がかかる引き出しの奥には使用頻度の低いものを配置する.グループ:ものをグループごとに配置する.同じグループ名のものが隣接しているか,向きが揃っているかで点数化する.容量:ものをできるだけ多く配置する.上からの見やすさ:引き出しを開けたとき,上から見やすい配置であるのが好ましいため,上から見たときにより多くのものを見渡せ,本のタイトルやもののラベルも見えるように配置する.従来のシステムではこれらの条件の下での最適な配置を計
算し,3次元描画として提示するのみであった.
3 提案システム3.1 システム設計提案システムでは,各々のものの配置をユーザが動かせる
ようにする.その挙動に合わせてそれぞれの片付け条件の点数をリアルタイムに表示することで,ユーザはものの配置の変化に対してそれぞれの評価がどのように変わるのかを確認できる.また,物理シミュレーションを導入することによ
(a) 引き出しを動かす前 (b) 引き出しを動かした後
図 1: 新たに作成した片付けアプリ画面
り,よりリアルに引き出し内のものが動き,傾いた配置なども表現できるようになる.片付け条件については,前章で述べた使用頻度・グループ・容量・上からの見やすさの 4つに加えて,配置の乱れやすさについて新しく考慮する.
3.2 評価値:配置の乱れやすさ引き出しの開閉動作で,どれくらいものが動くのかを考慮
する.せっかく引き出しの中に綺麗に片付けても,その配置がすぐに乱れてしまっては台無しであるため,多少の開閉動作では配置が乱れないほうが好ましいと考えられる.具体的な評価方法としては,基準となる 1つの配置に対して,物理シミュレーション上で引き出しに適当な初速を与えてものを動かし,それぞれのものがどれくらい動いたかを考える.引き出しのもの全体がそのままスライドするような動きは配置が乱れていないと考え,すべてのものの位置の平均からどれくらい外れた動きをしたかで評価する.それぞれのものが基準となった配置から移動した変位量を (xi, yi, zi)として,式にすると総変位量Mは以下のようになる.
M =∑i
((xi, yi, zi)− ((∑k
xk), (∑k
yk), (∑k
zk))) (1)
Mの値が小さいほど全体の動きが乱れておらず,配置が乱れにくいと考えられる.
4 実装3章で述べたシステム構成を基に作成した実際のアプリ画
面を図 1に示す.システムの実装にはUnityを用いた.それぞれのものはマウスドラッグで動かすことができ,その動きに合わせて図 1右側の数値が示すように,片付け配置についての 5つの評価値とその総計がリアルタイムに変化し,表示される.
5 おわりに本研究では,3次元物理シミュレーションを用いた引き出
し内の片付け配置のリアルタイム評価システムを提案した.今後の課題としては,評価値「配置の乱れやすさ」についての妥当性の評価や,システムの利用によりユーザの片付け能力が向上するかどうかの調査が挙げられる.
参考文献[1] 古田達彦, 寺田 努, 塚本昌彦: 条件付き箱詰めアルゴリズムを用いた引き出し内の片付け支援システム, DI-
COMO2015論文集,Vol. 2015, pp. 1458–1465 (2015).

Wi-Fi と気圧センシングを用いた階層推定
西山大河, 村尾和哉, 望月祐洋, 西尾信彦(立命館大学)
1. 研究の背景と目的
スマートフォンに搭載されたセンサを用いて測位を行う
研究が数多く提案されており,そのひとつとして,Wi-Fi 基地局を利用する Wi-Fi測位が提案されている.Wi-Fi測位ではあらかじめ観測対象の領域内の複数の地点で観測される
Wi-Fi基地局電波やその電波強度(RSSI)を収集して学習を行い,測位時に観測されるデータと比較することで位置を推
定する.Wi-Fi測位は GPSの電波の受信が困難な屋内でも使用できるが,吹き抜け構造の場所ではユーザが現在いる階層
とは異なる階層のWi-Fi基地局の電波を観測するため,測位誤差が増大したり,測位結果が実際とは異なる階層の地点と
なることがある.予備実験として,筆者らの所属する研究棟
の 1階から 2階へ階段を経由して移動した際に観測した最も強い RSSIの基地局が存在する階層と正解の階層を図 1に示す.1 階から 2 階に階段で移動している時の正解階層は 1.5階としている.経路上には吹き抜け構造が 2箇所あり,吹き抜け構造の区間で異なる階層の基地局の RSSI が最も強くなっていることがわかる.このように,観測されるすべてのWi-Fi基地局の情報を用いると測位誤差が大きくなるため,事前にユーザがいる階層を認識する必要がある. 本研究では,近年,スマートフォンに広く搭載されるよう
になった気圧センサに着目し,Wi-Fi 基地局情報と気圧センサの値を組み合わせることにより,建物内で階層推定を行う
ことを目的とする.Wi-Fi 測位において現在いる階層の基地局のみを用いることができ,測位誤差の低減につながる.ま
た,外と接続していない階層(非接続階層)では GPSのサンプリング間隔を長くすることで消費電力を削減できる. 2. 関連研究
米田ら[1]はスマートフォンに搭載された気圧センサを用いて階層移動を検出する手法を提案している.この手法では
一秒毎の気圧変化量が一定時間,閾値を上回った場合に階層
移動が発生したとみなしている.階層移動検出前後における
気圧変化量の正負の変わり目を階層移動の開始・終了地点と
し,階層間の気圧差をあらかじめ保持しておくことで,階層
移動数を推定している.しかし,相対的な階層移動数しか推
定できないため,階層移動数の推定に誤りが生じると,以降
の階層推定に誤りが生じるという問題がある.また,初期階
層を事前に与える必要がある. 3. 提案手法
提案手法は,気圧センシングによって相対的な階層推定を
行い,Wi-Fi 基地局情報を用いた絶対階層の推定で適宜補正を行う.気圧センシングによる階層推定では,階層を推定す
る基準となる階層(基準階層)と気圧(基準気圧)を保持し,
現在気圧と基準気圧から階層移動数を算出することで現在階
層を推定する.図 2に階層推定のフローチャートを示す.天
図 1:Wi-Fi基地局情報を用いた階層推定
図 2:気圧センシングによる階層推定
候や気温の変化により気圧は刻々と変化するため,基準階層
と基準気圧を更新しないと階層推定を正しく行えなくなる.
このため,気圧変化量が一定時間,閾値以下の場合に,ユー
ザが同じ階層に留まっていると判断して基準階層と基準気圧
をその時点の現在階層と現在気圧で置き換える. また,天候や空調の影響で短時間に気圧が大きく変化する
時,単純な気圧の変化量からだけでは階層推定を誤る恐れが
ある.そこで, RSSIが閾値以上の設置階層が既知のWi-Fi基地局の電波を観測した時にのみ,当該基地局が存在する階
層を現在階層とみなし補正を行う.閾値は,Wi-Fi 基地局に十分に近づかないと観測されないような値とする. 4. おわりに
本研究では,気圧センシングとWi-Fi基地局情報を用いた階層推定手法を提案した.今後は提案手法の実装および有効
性の評価を行う. 参考文献
[1] 米田圭佑, 望月祐洋, 西尾信彦. 気圧センシング技術を用いた行動認識手法. 情報処理学会論文誌, Vol. 56, No. 1, pp. 260–272 (2015).
Wi-Fi基地局を用いたユーザの移動経路認識および経路上の位置推定内堀和哉,望月祐洋,村尾和哉,西尾信彦(立命館大)
1 研究背景屋内における測位手法として,システムの導入コストが
低い無線 LANを用いた手法が提案されている.特にWi-Fi
は商業施設などにも広く普及しており,様々な場所でWi-Fi
基地局の電波を観測することができる.Wi-Fiを用いた屋内測位手法の一つにWi-Fiフィンガープリントによる手法がある.この手法では,事前作業として測位対象となる空間でWi-Fi電波情報を収集し,Wi-Fi電波環境マップを作成する.そして,Wi-Fi電波環境マップと観測されたWi-Fi電波情報をマッチングすることにより測位を行う.しかし,Wi-Fi
基地局は設置場所の移動や消滅が起こりうるため,Wi-Fi電波環境マップを定期的に更新する必要があり,システム管理者の大きな負担となる.一般的な屋内測位手法では,対象となる屋内のあらゆる地点で絶対座標が出力できることを想定している.しかし,リマインダの提示などのサービスでは,大まかな現在地や移動経路の認識ができれば十分である.Jiangら [1]は,ユーザが移動中に収集したWi-Fi電波情
報と加速度センサデータを用いて,部屋単位で標本を生成している.また,標本の類似度から隣接する部屋を判別し,部屋に挟まれた廊下を対象としてユーザの移動経路の判定を行っている.しかし,ユーザの移動経路判定のみにとどまっており,経路上の位置判定は行っていない.本研究では,ユーザの移動期間に着目し,移動経路の認識と経路上の位置推定を実現する.
2 提案手法提案手法では,まず,ユーザにスマートフォンを所持して
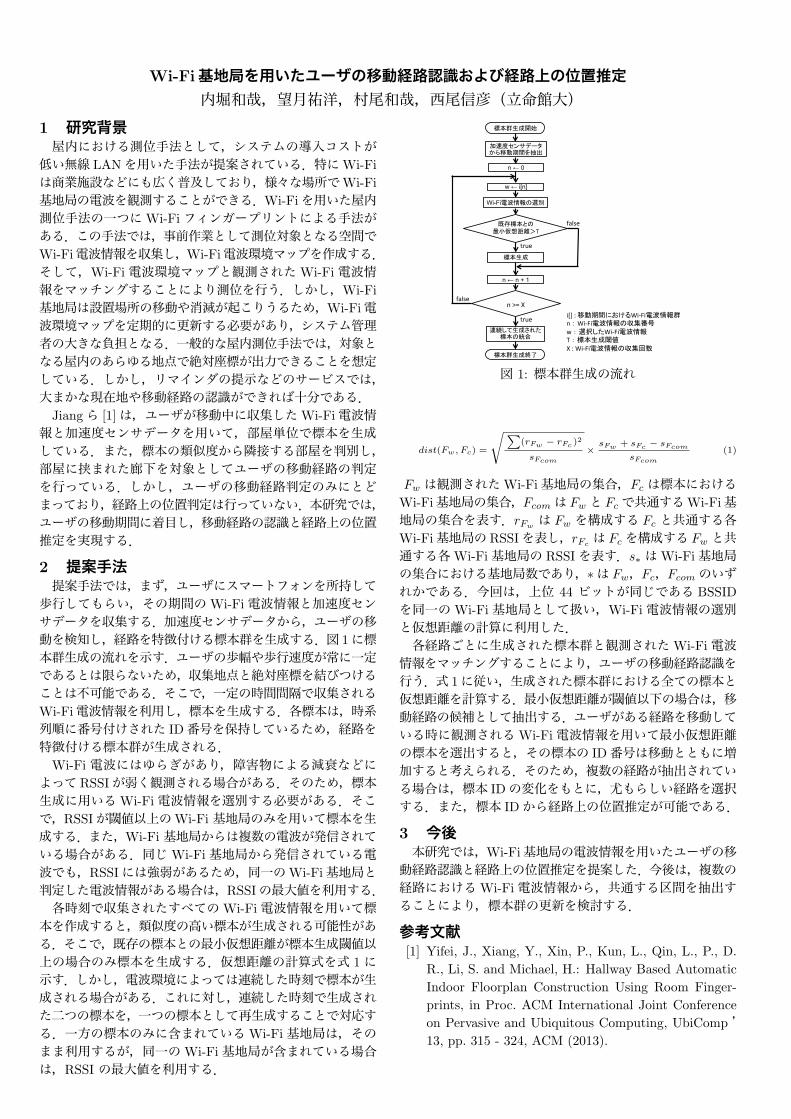
歩行してもらい,その期間のWi-Fi電波情報と加速度センサデータを収集する.加速度センサデータから,ユーザの移動を検知し,経路を特徴付ける標本群を生成する.図 1に標本群生成の流れを示す.ユーザの歩幅や歩行速度が常に一定であるとは限らないため,収集地点と絶対座標を結びつけることは不可能である.そこで,一定の時間間隔で収集されるWi-Fi電波情報を利用し,標本を生成する.各標本は,時系列順に番号付けされた ID番号を保持しているため,経路を特徴付ける標本群が生成される.Wi-Fi 電波にはゆらぎがあり,障害物による減衰などに
よって RSSIが弱く観測される場合がある.そのため,標本生成に用いるWi-Fi電波情報を選別する必要がある.そこで,RSSIが閾値以上のWi-Fi 基地局のみを用いて標本を生成する.また,Wi-Fi 基地局からは複数の電波が発信されている場合がある.同じWi-Fi基地局から発信されている電波でも,RSSIには強弱があるため,同一のWi-Fi基地局と判定した電波情報がある場合は,RSSIの最大値を利用する.各時刻で収集されたすべてのWi-Fi電波情報を用いて標
本を作成すると,類似度の高い標本が生成される可能性がある.そこで,既存の標本との最小仮想距離が標本生成閾値以上の場合のみ標本を生成する.仮想距離の計算式を式 1に示す.しかし,電波環境によっては連続した時刻で標本が生成される場合がある.これに対し,連続した時刻で生成された二つの標本を,一つの標本として再生成することで対応する.一方の標本のみに含まれているWi-Fi基地局は,そのまま利用するが,同一のWi-Fi基地局が含まれている場合は,RSSI の最大値を利用する.
!"#$%&'() *+,-./0123
Wi-Fi456789:3
;<=>3
!"#$%$,-./?@AB&!'(!4567C$
)$DE&!'(!45678FGHI$
*$DE9JKL&!'(!4567$
+$DE;<=>MN$
,$%$&!'(!45678FGOP3
n ← 03
Q-./3
RS;<T8$
UVWXYZ[+3
0123/3
)$45$,3
w ← i[n]3
n ← n + 13
\]K^=>_`L;<8ab3
;<C=>cd3
;<C=>ef$
Q-./3
0123/3
図 1: 標本群生成の流れ
dist(Fw, Fc) =
√ ∑(rFw − rFc )
2
sFcom
×sFw + sFc − sFcom
sFcom
(1)
Fw は観測されたWi-Fi基地局の集合,Fc は標本におけるWi-Fi基地局の集合,Fcomは Fwと Fcで共通するWi-Fi基地局の集合を表す.rFw は Fw を構成する Fc と共通する各Wi-Fi基地局のRSSIを表し,rFc は Fcを構成する Fwと共通する各Wi-Fi基地局の RSSIを表す.s∗ はWi-Fi基地局の集合における基地局数であり,∗は Fw,Fc,Fcomのいずれかである.今回は,上位 44 ビットが同じである BSSID
を同一のWi-Fi基地局として扱い,Wi-Fi電波情報の選別と仮想距離の計算に利用した.各経路ごとに生成された標本群と観測されたWi-Fi電波
情報をマッチングすることにより,ユーザの移動経路認識を行う.式 1に従い,生成された標本群における全ての標本と仮想距離を計算する.最小仮想距離が閾値以下の場合は,移動経路の候補として抽出する.ユーザがある経路を移動している時に観測されるWi-Fi電波情報を用いて最小仮想距離の標本を選出すると,その標本の ID番号は移動とともに増加すると考えられる.そのため,複数の経路が抽出されている場合は,標本 IDの変化をもとに,尤もらしい経路を選択する.また,標本 IDから経路上の位置推定が可能である.
3 今後本研究では,Wi-Fi基地局の電波情報を用いたユーザの移
動経路認識と経路上の位置推定を提案した.今後は,複数の経路におけるWi-Fi電波情報から,共通する区間を抽出することにより,標本群の更新を検討する.
参考文献[1] Yifei, J., Xiang, Y., Xin, P., Kun, L., Qin, L., P., D.
R., Li, S. and Michael, H.: Hallway Based Automatic
Indoor Floorplan Construction Using Room Finger-
prints, in Proc. ACM International Joint Conference
on Pervasive and Ubiquitous Computing, UbiComp ’13, pp. 315 - 324, ACM (2013).
Wi-Fi測位のための基地局の組合せを利用した基地局選定
川中麻記子,望月祐洋,村尾和哉,西尾信彦(立命館大学)
図 1: G/Lビット
図 2: 実際の BSSIDとその予測位置
1 研究背景GPSによる測位では電波の届きづらい屋内では利用でき
ない.そこで公共施設へのWi-Fi基地局 (以下,基地局)の設置の増加にともないWi-Fi測位が注目されている.Wi-Fi
測位は事前に収集された電波のモデルに基づいて測位する.従来ではWi-Fi測位に利用する基地局は,例えば,ESSID
の文字列からキャリアが運用すると考えられる基地局など,ヒューリスティックに選ばれており,時間の経過による基地局の出現・消滅・移動を考慮できていない.本研究では基地局の電波を観測することで基地局の出現・
消滅・移動を検出し,基地局を選出する.従来では使っていなかった基地局も測位に使うことができれば,測位精度の向上が見込める.また,基地局の消滅・移動を検出できると,事前の電波モデルの経年劣化を把握できる.
2 アプローチ本研究ではWi-Fiスキャンで一緒に観測される基地局の
組合せの変化から基地局を選定する.
2.1 基地局データの整理本研究室がリリースしている梅田地下街の位置推定アプ
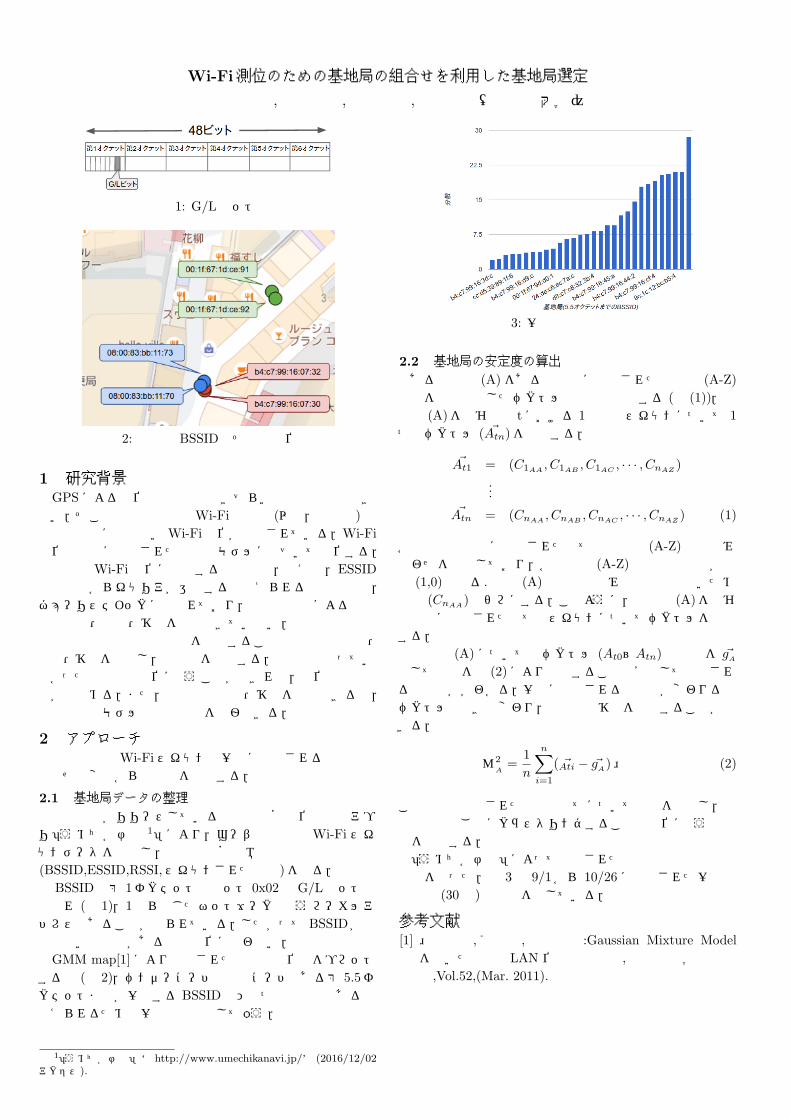
リ「うめちかナビ 1」により,ユーザの端末の Wi-Fi スキャンデータを収集し,梅田地下街全域の基地局の電波情報(BSSID,ESSID,RSSI,スキャンされた時刻)を得る.基地局の BSSIDの第 1オクテットのビット 0x02はG/Lビットと呼ばれ (図 1),1なら閉じたネットワークで使うローカルアドレスであることが知られている.したがって BSSIDが無二でない可能性があるので測位に使わない.GMM map[1]により予測された基地局の位置をプロット
すると (図 2),ベンダーコードと機種コードである第 5.5オクテットまでが一致する BSSIDはひとつの基地局であると考えられるため同一の基地局として扱う.
1「うめちかナビ」< http://www.umechikanavi.jp/> (2016/12/02アクセス).
図 3: 一部の基地局の分散
2.2 基地局の安定度の算出ある基地局 (A) をある期間内に観測された基地局 (A-Z)
の数を次元数としたベクトルの集合で表現する (式 (1)).基地局 (A)を含む時刻 tにおける 1回分のスキャンについて 1
つのベクトル (Atn)を生成する.
At1 = (C1AA , C1AB , C1AC , · · · , CnAZ )
...
Atn = (CnAA, CnAB
, CnAC, · · · , CnAZ
) (1)
各次元は期間内に観測された全ての基地局 (A-Z)との組み合わせを表現しており,各基地局 (A-Z)の観測の有無が二値 (1,0)で入る. 基地 (A)自身との組みは特徴ではないため次元 (CnAA
)はゼロにする.このように,基地局 (A)を含む期間内に観測された全てのスキャンについてベクトルを生成する.基地局 (A)についてのベクトル (At0~Atn) の重心を gA
として分散を式 (2)により算出することで安定して観測される基地局かがわかる.一緒に観測される基地局が変わりるとベクトルの向きも変わり,基地局の移動を検知することができる.
σ2A=
1
n
n∑i=1
(Ati − gA) (2)
この手順で観測された基地局全てについて分散を算出し,基地局の性質ごとにクラスタリングすることで測位に使う基地局を選定する.「うめちかナビ」によって観測された基地局の分散の予備調査を行った.図 3は 9/1から 10/26に観測された一部の基地局 (30個)の分散を示している.
参考文献[1] 藤田迪, 梶克彦, 河口信夫:Gaussian Mixture Model
を用いた 無線 LAN 位置推定手法, 情報処理学会論文誌,Vol.52,(Mar. 2011).
ITSにおける技術の実用化動向と課題について
宮下浩一(株式会社三菱総合研究所)
1. ITSにおける新技術の実用化動向
自動車はデジタル化の影響を非常に受けている産業のひ
とつ.かつてはハンドルとタイヤの向きはギアなどで機械的
に連動していたが,最新の車両ではハンドル角を電子的に計
測し電気信号でタイヤの向きの制御を行う.すでに自動車に
デジタル制御用のマイコンである ECUが 100個以上搭載さ
れている.
これらの自動車の IT 化のうち,特に通信を介在すること
による自動車の高度化のことを,ITS(Intelligent Transport
Systems:高度道路交通システム)と呼ぶ.筆者らはこれま
で,主に下記の 3つの ITS技術の実用化に携わってきた.
① ETC2.0
② コネクティッドサービス
③ 自動運転システム
本稿では,これらの技術の実用化の携わった経験を踏まえ
て,自動運転システムの実用化に向けた課題や,ユビキタス・
ウェアラブルとの関連について述べる.
2. 新技術の実用化における課題
大学や企業の研究所では,日々新たな技術の研究が行われ
ている.これらの研究テーマのうち,特許化などで研究フェ
ーズを抜け出し,実用化に向けた検討に入れる有望なテーマ
はごく一部である.
さらに,これらの有望なテーマの実用化には,次の 3つの
壁が存在する.
① ルール
新たな技術・アイデアが,既存の法律や規制などのルー
ルに抵触するケースがある.例えば自動運転システムに
おいては,現行法によるとハンドルから手を離すことが
禁じられている.
② 価格・コスト
どんなにすばらしいサービスであっても,消費者の支払
い意思額との乖離が大きい場合には,実用化に至らない.
例えば,10 年前の自動運転システムの研究においては,
道路にコイルを埋め込み方式の研究が盛んに行われたが,
結局,道路工事のコストがネックとなり実用化にいたら
なかった.
③ 社会的受容性
新たな技術が社会の人々に不安を与えてしまうと,社会
的に受け入れられない.例えば自動運転システムにおい
ても,仮に衝突を回避できる車間距離で走行していても,
前の車両のドライバが「煽られている」と感じさせてし
まうと,想定外の事故を誘発するなどの懸念が提示され
ている.
一方で,これらの実用化に至る壁が,新たな研究テーマと
なる可能性がある.
3. ユビキタス・ウェアラブルと自動運転システム
自動運転システムの実用化の壁に高速道路における合流が
ある.特に阪神高速や首都高速などの都市高速では,時速 70
~100km の車が走行するなか,わずか数十mの合流車線で,
安全に合流できるギャップを見つけて合流している.全ての
車が自動運転車になり,車車間通信などでタイミングを調整
できる環境では問題ないが,自動運転車と一般ドライバが混
在する環境では,従来,人と人が阿吽の呼吸で行っていた調
整を,機械と人とで行う必要がある.このインタラクション
については,まだ有効な解が見つかっていない.
自動運転システムにおいては,カーナビの地図よりも高精
度な地図が必要と言われている.一方で,地図のメンテナン
スには莫大なコストがかかる.車に搭載するカメラ画像を集
めることで,地図を更新する仕組みなども研究されているも
のの,精度やコスト,プライバシーの問題など,クリアすべ
き課題は多い.
自動車に搭載するセンサが見渡せる範囲は,せいぜい
200m程度である.一方で,高速走行している車が 200m先
の落下物を見つけてから車線変更しようとしても,急ハンド
ル・急ブレーキになってしまう.道路上のカメラや他の車両
のカメラなどを組み合わせて,道路の先を俯瞰できるような
センサネットワークが求められる.
仮にドライバが運転から解放されると,新たな余暇時間が
生まれる.狭い社内空間におけるエンタテーメントの需要が
高まる一方で,VR ゲームに没頭したり,映画にのめりこん
でいるドライバに,万一の際の運転を引き継ぐインタフェー
スの開発が待たれる.
車載DSMSに向けた静的スケジューリング手法の提案仲川真世(立命館大学),安積卓也(大阪大学),西尾信彦(立命館大学)
1 研究の背景と目的近年,車両の制御状況や周辺状況を把握し,自動車事故を
防止する運転支援システム (DSSS) が数多く登場している.例えば,衝突の危険性がある場合,ブレーキを制御し衝突を回避する衝突被害軽減制動機能がある.DSSSはカメラやミリ波レーダーなどのセンサ,周辺他車と通信を行う車車間通信,路上の通信機との通信を行う路車間通信などの情報を用いて実現されている.DSSSの数が増加していることに伴い,車載システム全体の設計や開発に関わるコストが増加している.そのような問題を解決するために,車載システムへの Data Stream Management System (DSMS)適用研究 [1]
が行われている.車載 DSMSでは人命に関わるシステムが多く,ハードリ
アルタイム処理が求められることに加え、タスクの処理順序などを静的に決定する必要がある.しかし,従来の DSMS
ではハードリアルタイム処理は求められていないため,デッドラインを守る静的な手法が求められる.既存の静的スケジューリング手法 [2]も存在するが,計算資源を活用しきれずスケジューリング長(makespan)が長くなる問題,スケジューリングの際に解が出ない問題があるため適用することはできない.これらの問題点を改善した車載 DSMSに向けた静的スケジューリング手法を提案する.
2 関連研究・技術2.1 Data Stream Management System (DSMS)
DSMSとは,一過性のデータを即座に処理するシステムであり,株取引や為替相場レート変動などのリアルタイム観測に用いられている.車載システムに適用することにより,従来システムに比べて小さいオーバーヘッドで処理が可能であり,開発コストの低減が可能である.DSMSでのデータの流れは DAGで表現を行うことが可能である。2.2 Directed Acyclic Graph (DAG)
DAGとはグラフ理論における閉路のない有向グラフを表しており,データフローを表す際に用いられることが多い.2.3 車載システムに向けたスケジューリング手法車載システムを対象としたDAGスケジューリング手法としてHSV CC[2]がある.HSV CCでは,プロセッサやリンクの性能差を考慮したスケジューリングを行うことにより,実際の車載システムに想定環境を近づけてスケジューリングを行う.しかし,性能の良いプロセッサにタスクが集中しmakespanが長くなる問題や,子ノードが親ノードよりエッジの数が多いとスケジューリングの解が出ない問題があるため,車載システムに適用できない.
3 提案手法本研究の前提として,XMLで記述された車載 DSMSの
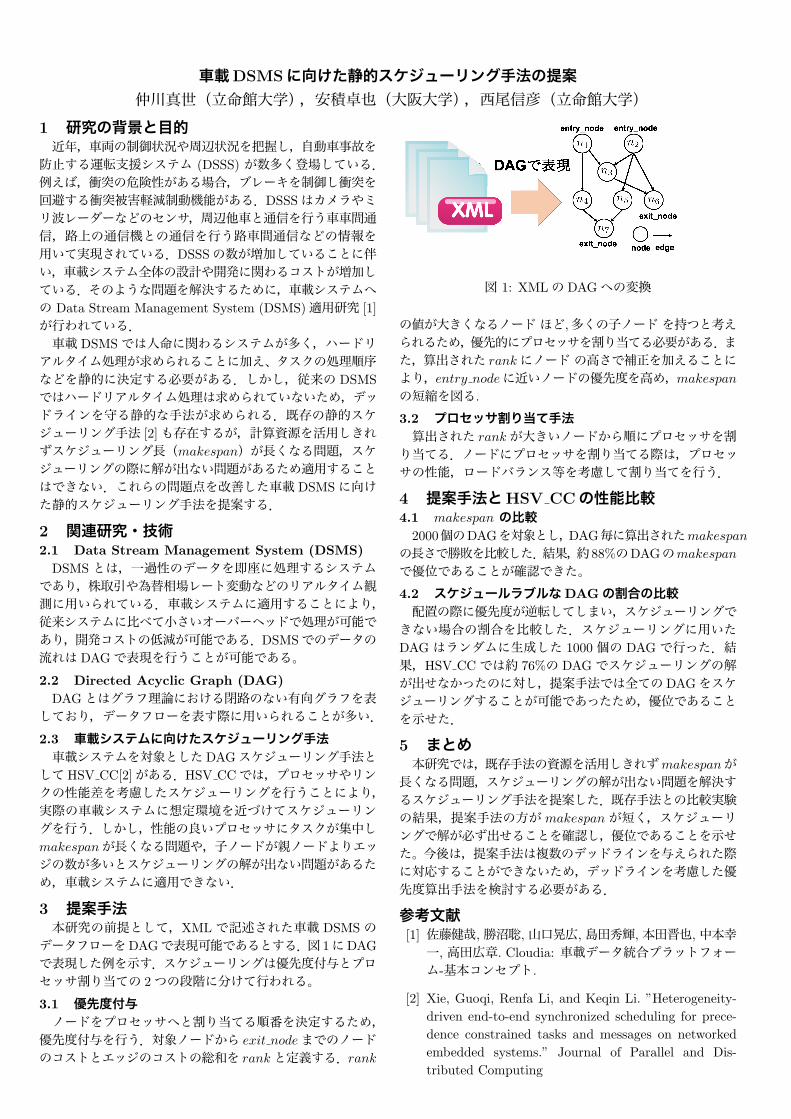
データフローをDAGで表現可能であるとする.図 1にDAG
で表現した例を示す.スケジューリングは優先度付与とプロセッサ割り当ての 2つの段階に分けて行われる。3.1 優先度付与ノードをプロセッサへと割り当てる順番を決定するため,
優先度付与を行う.対象ノードから exit nodeまでのノードのコストとエッジのコストの総和を rankと定義する.rank
図 1: XMLの DAGへの変換
の値が大きくなるノードほど,多くの子ノードを持つと考えられるため,優先的にプロセッサを割り当てる必要がある.また,算出された rankにノードの高さで補正を加えることにより,entry nodeに近いノードの優先度を高め,makespan
の短縮を図る.
3.2 プロセッサ割り当て手法算出された rankが大きいノードから順にプロセッサを割り当てる.ノードにプロセッサを割り当てる際は,プロセッサの性能,ロードバランス等を考慮して割り当てを行う.
4 提案手法とHSV CCの性能比較4.1 makespan の比較2000個のDAGを対象とし,DAG毎に算出されたmakespan
の長さで勝敗を比較した.結果,約88%のDAGのmakespan
で優位であることが確認できた。4.2 スケジュールラブルなDAGの割合の比較配置の際に優先度が逆転してしまい,スケジューリングできない場合の割合を比較した.スケジューリングに用いたDAGはランダムに生成した 1000個の DAGで行った.結果,HSV CCでは約 76%の DAGでスケジューリングの解が出せなかったのに対し,提案手法では全てのDAGをスケジューリングすることが可能であったため,優位であることを示せた.
5 まとめ本研究では,既存手法の資源を活用しきれずmakespanが長くなる問題,スケジューリングの解が出ない問題を解決するスケジューリング手法を提案した.既存手法との比較実験の結果,提案手法の方が makespanが短く,スケジューリングで解が必ず出せることを確認し,優位であることを示せた。今後は,提案手法は複数のデッドラインを与えられた際に対応することができないため,デッドラインを考慮した優先度算出手法を検討する必要がある.
参考文献[1] 佐藤健哉,勝沼聡,山口晃広,島田秀輝,本田晋也,中本幸一, 高田広章. Cloudia: 車載データ統合プラットフォーム-基本コンセプト.
[2] Xie, Guoqi, Renfa Li, and Keqin Li. ”Heterogeneity-
driven end-to-end synchronized scheduling for prece-
dence constrained tasks and messages on networked
embedded systems.” Journal of Parallel and Dis-
tributed Computing
3次元地図生成のためのROS資源管理機構の構築福富大輔(立命館大学),安積卓也(大阪大学),加藤真平(東京大学),西尾信彦(立命館大学)
1 研究背景と目的近年,自動運転に関する研究が盛んである.Autoware[1]を
はじめとした自動運転システムは,ROS(Robot Operating
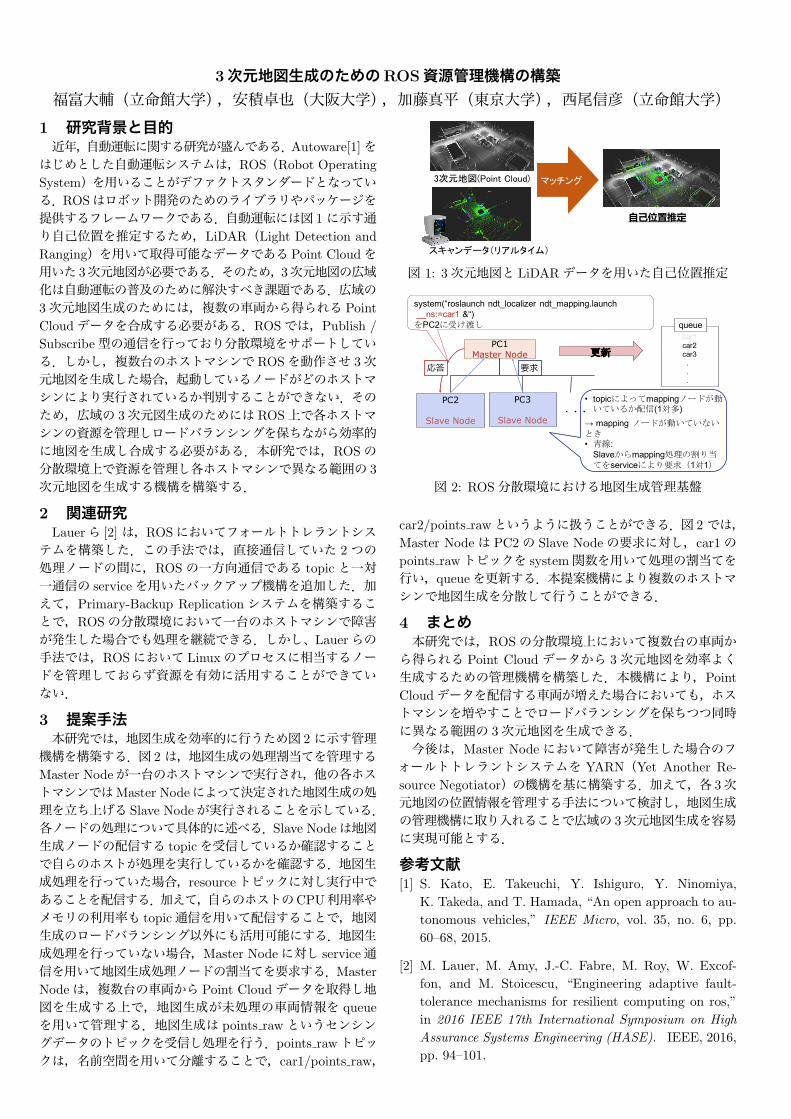
System)を用いることがデファクトスタンダードとなっている.ROSはロボット開発のためのライブラリやパッケージを提供するフレームワークである.自動運転には図 1 に示す通り自己位置を推定するため,LiDAR(Light Detection and
Ranging)を用いて取得可能なデータである Point Cloudを用いた 3次元地図が必要である.そのため,3次元地図の広域化は自動運転の普及のために解決すべき課題である.広域の3次元地図生成のためには,複数の車両から得られる Point
Cloudデータを合成する必要がある.ROSでは,Publish /
Subscribe型の通信を行っており分散環境をサポートしている.しかし,複数台のホストマシンで ROSを動作させ 3次元地図を生成した場合,起動しているノードがどのホストマシンにより実行されているか判別することができない.そのため,広域の 3次元図生成のためには ROS上で各ホストマシンの資源を管理しロードバランシングを保ちながら効率的に地図を生成し合成する必要がある.本研究では,ROSの分散環境上で資源を管理し各ホストマシンで異なる範囲の 3
次元地図を生成する機構を構築する.
2 関連研究Lauerら [2] は,ROSにおいてフォールトトレラントシス
テムを構築した.この手法では,直接通信していた 2つの処理ノードの間に,ROSの一方向通信である topicと一対一通信の serviceを用いたバックアップ機構を追加した.加えて,Primary-Backup Replicationシステムを構築することで,ROSの分散環境において一台のホストマシンで障害が発生した場合でも処理を継続できる.しかし、Lauerらの手法では,ROSにおいて Linuxのプロセスに相当するノードを管理しておらず資源を有効に活用することができていない.
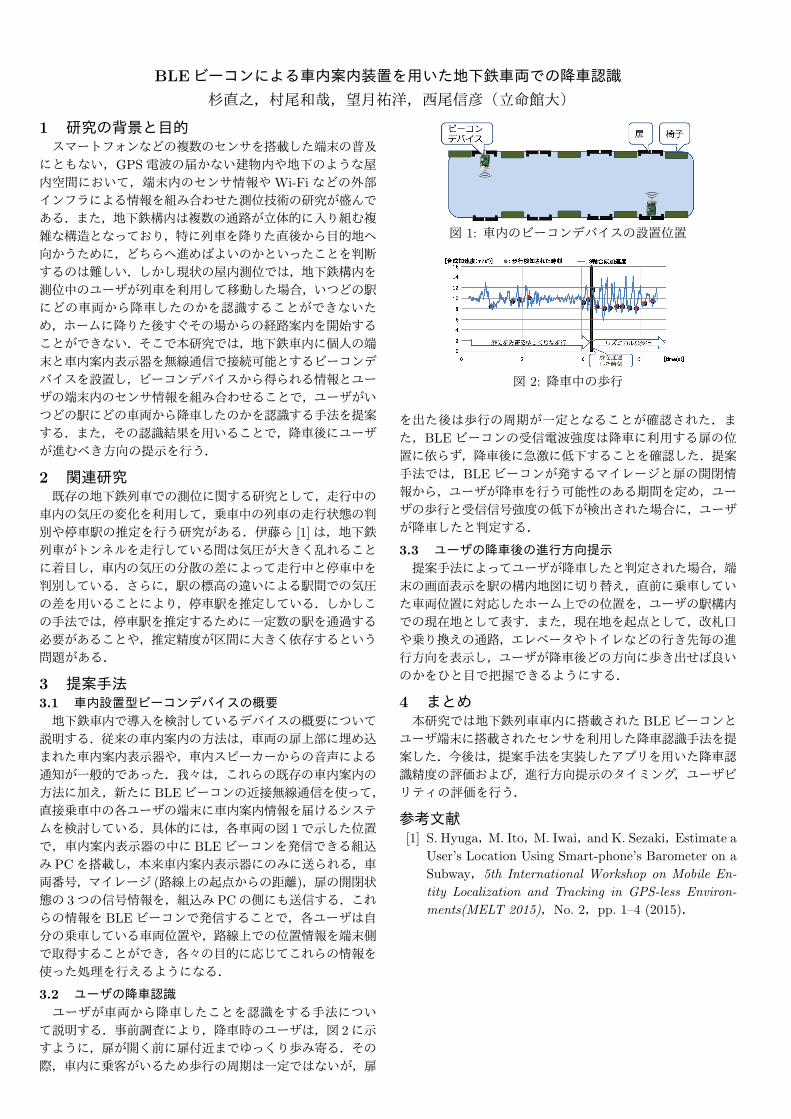
3 提案手法本研究では,地図生成を効率的に行うため図 2に示す管理
機構を構築する.図 2 は,地図生成の処理割当てを管理するMaster Nodeが一台のホストマシンで実行され,他の各ホストマシンではMaster Nodeによって決定された地図生成の処理を立ち上げる Slave Nodeが実行されることを示している.各ノードの処理について具体的に述べる.Slave Nodeは地図生成ノードの配信する topicを受信しているか確認することで自らのホストが処理を実行しているかを確認する.地図生成処理を行っていた場合,resourceトピックに対し実行中であることを配信する.加えて,自らのホストのCPU利用率やメモリの利用率も topic通信を用いて配信することで,地図生成のロードバランシング以外にも活用可能にする.地図生成処理を行っていない場合,Master Nodeに対し service通信を用いて地図生成処理ノードの割当てを要求する.Master
Nodeは,複数台の車両から Point Cloudデータを取得し地図を生成する上で,地図生成が未処理の車両情報を queue
を用いて管理する.地図生成は points rawというセンシングデータのトピックを受信し処理を行う.points rawトピックは,名前空間を用いて分離することで,car1/points raw,
3次元地図(Point Cloud)
スキャンデータ(リアルタイム)
マッチング
自己位置推定
図 1: 3次元地図と LiDARデータを用いた自己位置推定
PC1Master Node
PC2
Slave Node
PC3
Slave Node・・・
• topicによってmappingノードが動いているか配信(1対多)
→ mapping ノードが動いていないとき• 青線:
Slaveからmapping処理の割り当てをserviceにより要求(1対1)
car1car2car3...
更新
system(“roslaunch ndt_localizer ndt_mapping.launch__ns:=car1 &“)をPC2に受け渡し
要求応答
queue
図 2: ROS分散環境における地図生成管理基盤
car2/points rawというように扱うことができる.図 2 では,Master Nodeは PC2の Slave Nodeの要求に対し,car1のpoints rawトピックを system関数を用いて処理の割当てを行い,queueを更新する.本提案機構により複数のホストマシンで地図生成を分散して行うことができる.
4 まとめ本研究では,ROSの分散環境上において複数台の車両から得られる Point Cloudデータから 3次元地図を効率よく生成するための管理機構を構築した.本機構により,Point
Cloudデータを配信する車両が増えた場合においても,ホストマシンを増やすことでロードバランシングを保ちつつ同時に異なる範囲の 3次元地図を生成できる.今後は,Master Nodeにおいて障害が発生した場合のフ
ォールトトレラントシステムを YARN(Yet Another Re-
source Negotiator)の機構を基に構築する.加えて,各 3次元地図の位置情報を管理する手法について検討し,地図生成の管理機構に取り入れることで広域の 3次元地図生成を容易に実現可能とする.
参考文献[1] S. Kato, E. Takeuchi, Y. Ishiguro, Y. Ninomiya,
K. Takeda, and T. Hamada, “An open approach to au-
tonomous vehicles,” IEEE Micro, vol. 35, no. 6, pp.
60–68, 2015.
[2] M. Lauer, M. Amy, J.-C. Fabre, M. Roy, W. Excof-
fon, and M. Stoicescu, “Engineering adaptive fault-
tolerance mechanisms for resilient computing on ros,”
in 2016 IEEE 17th International Symposium on High
Assurance Systems Engineering (HASE). IEEE, 2016,
pp. 94–101.
BLEビーコンによる車内案内装置を用いた地下鉄車両での降車認識
杉直之,村尾和哉,望月祐洋,西尾信彦(立命館大)
1 研究の背景と目的スマートフォンなどの複数のセンサを搭載した端末の普及
にともない,GPS電波の届かない建物内や地下のような屋内空間において,端末内のセンサ情報やWi-Fiなどの外部インフラによる情報を組み合わせた測位技術の研究が盛んである.また,地下鉄構内は複数の通路が立体的に入り組む複雑な構造となっており,特に列車を降りた直後から目的地へ向かうために,どちらへ進めばよいのかといったことを判断するのは難しい.しかし現状の屋内測位では,地下鉄構内を測位中のユーザが列車を利用して移動した場合,いつどの駅にどの車両から降車したのかを認識することができないため,ホームに降りた後すぐその場からの経路案内を開始することができない.そこで本研究では,地下鉄車内に個人の端末と車内案内表示器を無線通信で接続可能とするビーコンデバイスを設置し,ビーコンデバイスから得られる情報とユーザの端末内のセンサ情報を組み合わせることで,ユーザがいつどの駅にどの車両から降車したのかを認識する手法を提案する.また,その認識結果を用いることで,降車後にユーザが進むべき方向の提示を行う.
2 関連研究既存の地下鉄列車での測位に関する研究として,走行中の
車内の気圧の変化を利用して,乗車中の列車の走行状態の判別や停車駅の推定を行う研究がある.伊藤ら [1]は,地下鉄列車がトンネルを走行している間は気圧が大きく乱れることに着目し,車内の気圧の分散の差によって走行中と停車中を判別している.さらに,駅の標高の違いによる駅間での気圧の差を用いることにより,停車駅を推定している.しかしこの手法では,停車駅を推定するために一定数の駅を通過する必要があることや,推定精度が区間に大きく依存するという問題がある.
3 提案手法3.1 車内設置型ビーコンデバイスの概要地下鉄車内で導入を検討しているデバイスの概要について
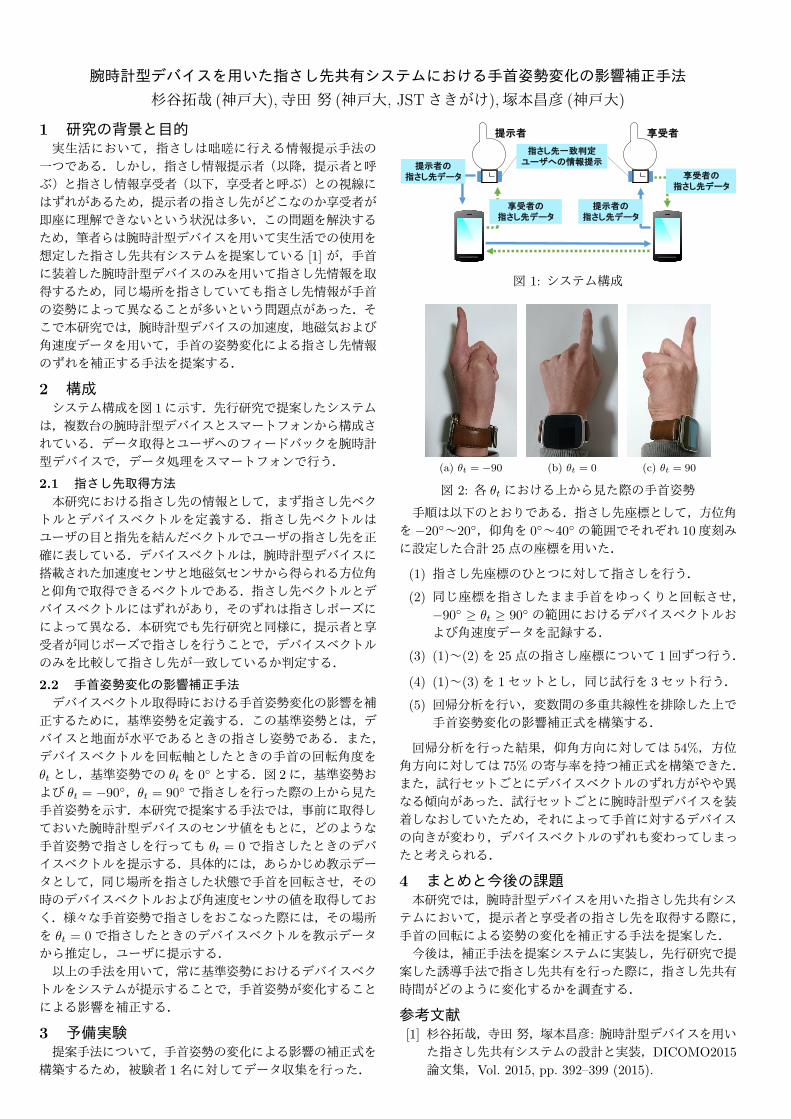
説明する.従来の車内案内の方法は,車両の扉上部に埋め込まれた車内案内表示器や,車内スピーカーからの音声による通知が一般的であった.我々は,これらの既存の車内案内の方法に加え,新たにBLEビーコンの近接無線通信を使って,直接乗車中の各ユーザの端末に車内案内情報を届けるシステムを検討している.具体的には,各車両の図 1で示した位置で,車内案内表示器の中に BLEビーコンを発信できる組込み PCを搭載し,本来車内案内表示器にのみに送られる,車両番号,マイレージ (路線上の起点からの距離),扉の開閉状態の 3つの信号情報を,組込み PCの側にも送信する.これらの情報を BLEビーコンで発信することで,各ユーザは自分の乗車している車両位置や,路線上での位置情報を端末側で取得することができ,各々の目的に応じてこれらの情報を使った処理を行えるようになる.
3.2 ユーザの降車認識ユーザが車両から降車したことを認識をする手法につい
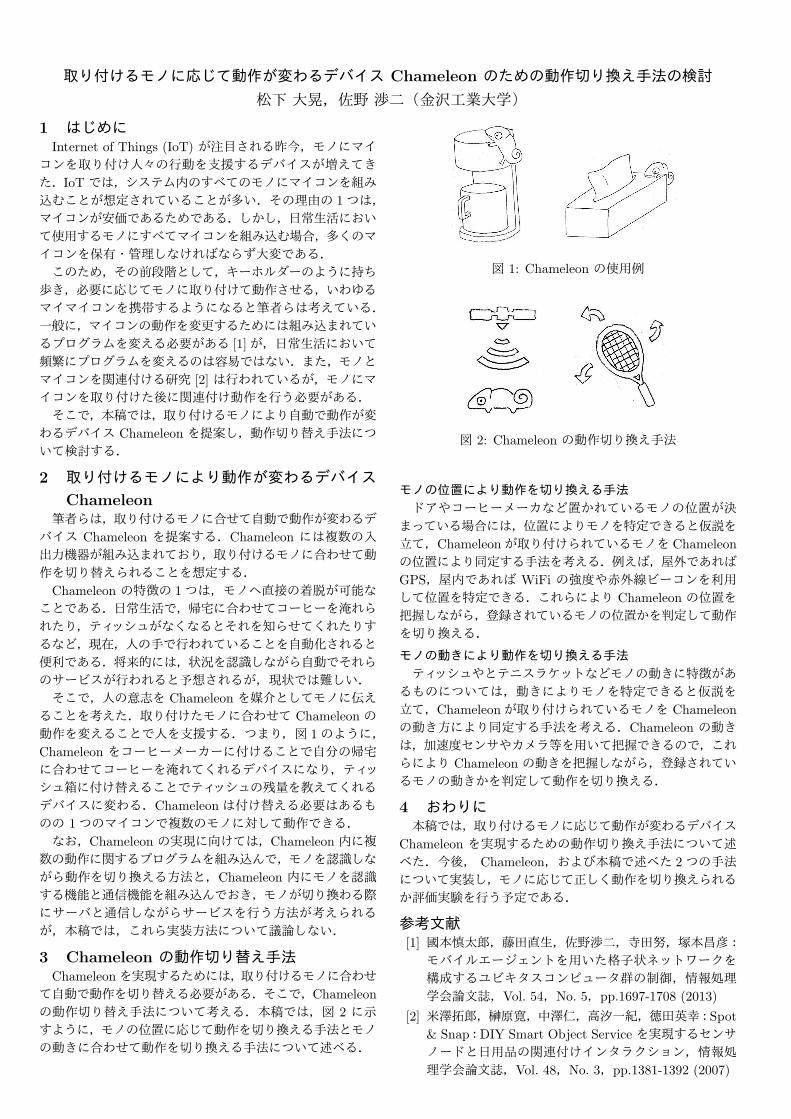
て説明する.事前調査により,降車時のユーザは,図 2に示すように,扉が開く前に扉付近までゆっくり歩み寄る.その際,車内に乗客がいるため歩行の周期は一定ではないが,扉
図 1: 車内のビーコンデバイスの設置位置
図 2: 降車中の歩行
を出た後は歩行の周期が一定となることが確認された.また,BLEビーコンの受信電波強度は降車に利用する扉の位置に依らず,降車後に急激に低下することを確認した.提案手法では,BLEビーコンが発するマイレージと扉の開閉情報から,ユーザが降車を行う可能性のある期間を定め,ユーザの歩行と受信信号強度の低下が検出された場合に,ユーザが降車したと判定する.
3.3 ユーザの降車後の進行方向提示提案手法によってユーザが降車したと判定された場合,端末の画面表示を駅の構内地図に切り替え,直前に乗車していた車両位置に対応したホーム上での位置を,ユーザの駅構内での現在地として表す.また,現在地を起点として,改札口や乗り換えの通路,エレベータやトイレなどの行き先毎の進行方向を表示し,ユーザが降車後どの方向に歩き出せば良いのかをひと目で把握できるようにする.
4 まとめ本研究では地下鉄列車車内に搭載された BLEビーコンとユーザ端末に搭載されたセンサを利用した降車認識手法を提案した.今後は,提案手法を実装したアプリを用いた降車認識精度の評価および,進行方向提示のタイミング,ユーザビリティの評価を行う.
参考文献[1] S. Hyuga,M. Ito,M. Iwai,and K. Sezaki,Estimate a
User’s Location Using Smart-phone’s Barometer on a
Subway,5th International Workshop on Mobile En-
tity Localization and Tracking in GPS-less Environ-
ments(MELT 2015),No. 2,pp. 1–4 (2015).

指輪型加速度センサおよび手首装着型振動子を用いたアクティブセンシングによる把持状態認識手法
河田大史(神戸大学),寺田 努(神戸大学, JST さきがけ),塚本昌彦(神戸大学)
1 研究の背景と目的把持状態の認識や把持している物体(以降,把持物体)の
識別はさまざまな面においてHCI(Human Computer Inter-
action)の発展に寄与するとされている.例えば,手がふさがっている状態なら自動で音声認識に切り替えるマルチモーダルインタフェースとしての応用や把持物体からコンテキストを取得し,ユーザの行動を支援するコンテキストアウェアネスへの応用などが考えられる.把持状態の認識や把持物体を識別する既存の手法として,把持される物体にセンサを装着する手法 [1, 2]などが提案されているが,すべての物体にセンサを装着するには大量のセンサが必要となるため汎用性に欠ける.そこで本研究では,把持される物体ではなく,ユーザにセンサを装着し,振動アクティブセンシングで把持状態の認識,把持物体の識別を行う汎用的な手法を提案する.具体的には,ユーザは振動モータを搭載した腕時計型のデバイスと加速度センサを搭載した指輪型のデバイスを装着する.腕時計型デバイスが振動すると,その振動は身体を伝わって指輪型デバイスで検知される.このとき,把持物体の有無,種類によって指輪型デバイスが検知する振動の特性が変化するため,その差異によって把持状態の認識,把持物体の識別を行う.この手法で用いる腕時計型デバイスと指輪型デバイスは既に普及しつつあり,将来的には多くの人が装着することが予想されるため,特別な機器を必要としないといえる.
2 システム概要図 1にシステム構成図を示す.図 1に示すように,ユー
ザは腕時計型デバイスと指輪型デバイスを装着する.腕時計型デバイスの振動モータは PWM制御によって印加電圧を制御され,振動モータの回転数(振動の周波数)を変化させることができる.指輪型デバイスは腕時計型デバイスの振動を検知し,PCやスマートフォンなどのコンピュータへ振動データを送信する.コンピュータは振動データを受信すると,振動データを高速フーリエ変換 (FFT: Fast Fourier
Transform) する.FFT によって得られたパワースペクトルから合計 7特徴量を抽出し,それらを識別器にかけることで把持状態および把持物体の認識を行う.
3 実装2 章で述べたシステム構成をもとにプロトタイプシステム
を作製した.プロトタイプシステムは,腕時計型デバイス,指輪型デバイス,マイコンおよび PCから構成される.
3.1 プロトタイプデバイス図 2に作製した腕時計型デバイス,指輪型デバイスを示
す.腕時計型デバイスは,モータ印加電圧を 2 V から 5 V
までおよそ 2.5 秒かけて上昇させることでさまざまな周波数成分を含む振動を起こすようになっている.指輪型デバイスは十分なサンプリング周波数で振動データを取得し,データ解析用の PC へ送信できる.
3.2 識別器作製したプロトタイプシステムの識別器は,予め取得して
おいた学習データをもとに作成された決定木を用いた.本システムは現在市販されている腕時計型デバイスや指輪型デバイスでの使用を想定しており,さらにリアルタイムでの処理
指輪型デバイス
腕時計型デバイス
コンピュータ
FFT解析
特徴量抽出
認識器
PWM 制御で振動モータの
回転数を制御
3 軸加速度合成
無線通信
図 1: システム構成
(a) 腕時計型デバイスと指輪型デバイス
(b) 装着図
図 2: 作製したプロトタイプデバイス
が求められるため,できるだけ計算量を抑える必要がある.今回用いた識別器であれば,認識処理は決定木に当てはめるだけなので計算量は少ない.
4 まとめと今後の課題本研究では,腕時計型デバイスと指輪型デバイスを用いた
振動アクティブセンシングによって把持状態および把持物体を識別するシステムを提案し,プロトタイプシステムを作製した.今後,デバイスの適切な装着位置や装着位置のズレによる認識精度への影響を詳しく調査する.
参考文献[1] 大野 誠, 志築 文太郎, 田中二郎: アクティブ音響センシングを用いた把持状態認識, インタラクション 2013論文集, pp. 56–63 (2013).
[2] H. Song, H. Benko, F. Guimbretiere, S. Izadi, X. Cao,
and K. Hinckley: Grips and Gestures on a Multi-
Touch Pen, Proc. of the 29th International Conference
on Human Factors in Computing Systems (CHI 2011),
pp. 1323–1332 (2011).
腕時計型デバイスを用いた指さし先共有システムにおける手首姿勢変化の影響補正手法
杉谷拓哉 (神戸大),寺田 努 (神戸大, JSTさきがけ),塚本昌彦 (神戸大)
1 研究の背景と目的実生活において,指さしは咄嗟に行える情報提示手法の
一つである.しかし,指さし情報提示者(以降,提示者と呼ぶ)と指さし情報享受者(以下,享受者と呼ぶ)との視線にはずれがあるため,提示者の指さし先がどこなのか享受者が即座に理解できないという状況は多い.この問題を解決するため,筆者らは腕時計型デバイスを用いて実生活での使用を想定した指さし先共有システムを提案している [1] が,手首に装着した腕時計型デバイスのみを用いて指さし先情報を取得するため,同じ場所を指さしていても指さし先情報が手首の姿勢によって異なることが多いという問題点があった.そこで本研究では,腕時計型デバイスの加速度,地磁気および角速度データを用いて,手首の姿勢変化による指さし先情報のずれを補正する手法を提案する.
2 構成システム構成を図 1に示す.先行研究で提案したシステム
は,複数台の腕時計型デバイスとスマートフォンから構成されている.データ取得とユーザへのフィードバックを腕時計型デバイスで,データ処理をスマートフォンで行う.
2.1 指さし先取得方法本研究における指さし先の情報として,まず指さし先ベク
トルとデバイスベクトルを定義する.指さし先ベクトルはユーザの目と指先を結んだベクトルでユーザの指さし先を正確に表している.デバイスベクトルは,腕時計型デバイスに搭載された加速度センサと地磁気センサから得られる方位角と仰角で取得できるベクトルである.指さし先ベクトルとデバイスベクトルにはずれがあり,そのずれは指さしポーズにによって異なる.本研究でも先行研究と同様に,提示者と享受者が同じポーズで指さしを行うことで,デバイスベクトルのみを比較して指さし先が一致しているか判定する.
2.2 手首姿勢変化の影響補正手法デバイスベクトル取得時における手首姿勢変化の影響を補
正するために,基準姿勢を定義する.この基準姿勢とは,デバイスと地面が水平であるときの指さし姿勢である.また,デバイスベクトルを回転軸としたときの手首の回転角度をθtとし,基準姿勢での θtを 0◦とする.図 2に,基準姿勢および θt = −90◦,θt = 90◦で指さしを行った際の上から見た手首姿勢を示す.本研究で提案する手法では,事前に取得しておいた腕時計型デバイスのセンサ値をもとに,どのような手首姿勢で指さしを行っても θt = 0で指さしたときのデバイスベクトルを提示する.具体的には,あらかじめ教示データとして,同じ場所を指さした状態で手首を回転させ,その時のデバイスベクトルおよび角速度センサの値を取得しておく.様々な手首姿勢で指さしをおこなった際には,その場所を θt = 0で指さしたときのデバイスベクトルを教示データから推定し,ユーザに提示する.以上の手法を用いて,常に基準姿勢におけるデバイスベク
トルをシステムが提示することで,手首姿勢が変化することによる影響を補正する.
3 予備実験提案手法について,手首姿勢の変化による影響の補正式を
構築するため,被験者 1名に対してデータ収集を行った.
提示者 享受者
提示者の
指さし先データ
指さし先一致判定
ユーザへの情報提示
享受者の
指さし先データ
提示者の
指さし先データ
享受者の
指さし先データ
図 1: システム構成
(a) θt = −90 (b) θt = 0 (c) θt = 90
図 2: 各 θt における上から見た際の手首姿勢
手順は以下のとおりである.指さし先座標として,方位角を−20◦~20◦,仰角を 0◦~40◦の範囲でそれぞれ 10度刻みに設定した合計 25点の座標を用いた.
(1) 指さし先座標のひとつに対して指さしを行う.
(2) 同じ座標を指さしたまま手首をゆっくりと回転させ,−90◦ ≥ θt ≥ 90◦ の範囲におけるデバイスベクトルおよび角速度データを記録する.
(3) (1)~(2)を 25点の指さし座標について 1回ずつ行う.
(4) (1)~(3)を 1セットとし,同じ試行を 3セット行う.
(5) 回帰分析を行い,変数間の多重共線性を排除した上で手首姿勢変化の影響補正式を構築する.
回帰分析を行った結果,仰角方向に対しては 54%,方位角方向に対しては 75%の寄与率を持つ補正式を構築できた.また,試行セットごとにデバイスベクトルのずれ方がやや異なる傾向があった.試行セットごとに腕時計型デバイスを装着しなおしていたため,それによって手首に対するデバイスの向きが変わり,デバイスベクトルのずれも変わってしまったと考えられる.
4 まとめと今後の課題本研究では,腕時計型デバイスを用いた指さし先共有シス
テムにおいて,提示者と享受者の指さし先を取得する際に,手首の回転による姿勢の変化を補正する手法を提案した.今後は,補正手法を提案システムに実装し,先行研究で提
案した誘導手法で指さし先共有を行った際に,指さし先共有時間がどのように変化するかを調査する.
参考文献[1] 杉谷拓哉,寺田努,塚本昌彦: 腕時計型デバイスを用いた指さし先共有システムの設計と実装,DICOMO2015
論文集,Vol. 2015, pp. 392–399 (2015).
取り付けるモノに応じて動作が変わるデバイス Chameleon のための動作切り換え手法の検討
松下 大晃,佐野 渉二(金沢工業大学)
1 はじめにInternet of Things (IoT) が注目される昨今,モノにマイ
コンを取り付け人々の行動を支援するデバイスが増えてきた.IoT では,システム内のすべてのモノにマイコンを組み込むことが想定されていることが多い.その理由の 1つは,マイコンが安価であるためである.しかし,日常生活において使用するモノにすべてマイコンを組み込む場合,多くのマイコンを保有・管理しなければならず大変である.このため,その前段階として,キーホルダーのように持ち
歩き,必要に応じてモノに取り付けて動作させる,いわゆるマイマイコンを携帯するようになると筆者らは考えている.一般に,マイコンの動作を変更するためには組み込まれているプログラムを変える必要がある [1]が,日常生活において頻繁にプログラムを変えるのは容易ではない.また,モノとマイコンを関連付ける研究 [2] は行われているが,モノにマイコンを取り付けた後に関連付け動作を行う必要がある.そこで,本稿では,取り付けるモノにより自動で動作が変
わるデバイス Chameleon を提案し,動作切り替え手法について検討する.
2 取り付けるモノにより動作が変わるデバイスChameleon
筆者らは,取り付けるモノに合せて自動で動作が変わるデバイス Chameleon を提案する.Chameleon には複数の入出力機器が組み込まれており,取り付けるモノに合わせて動作を切り替えられることを想定する.Chameleon の特徴の 1つは,モノへ直接の着脱が可能な
ことである.日常生活で,帰宅に合わせてコーヒーを淹れられたり,ティッシュがなくなるとそれを知らせてくれたりするなど,現在,人の手で行われていることを自動化されると便利である.将来的には,状況を認識しながら自動でそれらのサービスが行われると予想されるが,現状では難しい.そこで,人の意志を Chameleon を媒介としてモノに伝え
ることを考えた.取り付けたモノに合わせて Chameleon の動作を変えることで人を支援する.つまり,図 1のように,Chameleon をコーヒーメーカーに付けることで自分の帰宅に合わせてコーヒーを淹れてくれるデバイスになり,ティッシュ箱に付け替えることでティッシュの残量を教えてくれるデバイスに変わる.Chameleonは付け替える必要はあるものの 1つのマイコンで複数のモノに対して動作できる.なお,Chameleon の実現に向けては,Chameleon 内に複
数の動作に関するプログラムを組み込んで,モノを認識しながら動作を切り換える方法と,Chameleon 内にモノを認識する機能と通信機能を組み込んでおき,モノが切り換わる際にサーバと通信しながらサービスを行う方法が考えられるが,本稿では,これら実装方法について議論しない.
3 Chameleon の動作切り替え手法Chameleonを実現するためには,取り付けるモノに合わせ
て自動で動作を切り替える必要がある.そこで,Chameleon
の動作切り替え手法について考える.本稿では,図 2 に示すように,モノの位置に応じて動作を切り換える手法とモノの動きに合わせて動作を切り換える手法について述べる.
図 1: Chameleon の使用例
図 2: Chameleon の動作切り換え手法
モノの位置により動作を切り換える手法ドアやコーヒーメーカなど置かれているモノの位置が決
まっている場合には,位置によりモノを特定できると仮説を立て,Chameleonが取り付けられているモノを Chameleon
の位置により同定する手法を考える.例えば,屋外であればGPS,屋内であれば WiFi の強度や赤外線ビーコンを利用して位置を特定できる.これらにより Chameleon の位置を把握しながら,登録されているモノの位置かを判定して動作を切り換える.
モノの動きにより動作を切り換える手法ティッシュやとテニスラケットなどモノの動きに特徴があ
るものについては,動きによりモノを特定できると仮説を立て,Chameleonが取り付けられているモノを Chameleon
の動き方により同定する手法を考える.Chameleon の動きは,加速度センサやカメラ等を用いて把握できるので,これらにより Chameleon の動きを把握しながら,登録されているモノの動きかを判定して動作を切り換える.
4 おわりに本稿では,取り付けるモノに応じて動作が変わるデバイス
Chameleon を実現するための動作切り換え手法について述べた.今後, Chameleon,および本稿で述べた 2つの手法について実装し,モノに応じて正しく動作を切り換えられるか評価実験を行う予定である.
参考文献[1] 國本慎太郎,藤田直生,佐野渉二,寺田努,塚本昌彦:モバイルエージェントを用いた格子状ネットワークを構成するユビキタスコンピュータ群の制御,情報処理学会論文誌,Vol. 54,No. 5,pp.1697-1708 (2013)
[2] 米澤拓郎,榊原寛,中澤仁,高汐一紀,徳田英幸:Spot
& Snap:DIY Smart Object Service を実現するセンサノードと日用品の関連付けインタラクション,情報処理学会論文誌,Vol. 48,No. 3,pp.1381-1392 (2007)
光学シースルー型ヘッドマウントディスプレイのための直接ポインティング手法
宮入 瞭太,佐野 渉二(金沢工業大学)
1 はじめに近年,光学シースルー型ヘッドマウントディスプレイ (Head
Mounted Display; HMD) を含むさまざまなウェアラブル端末が開発されてきている.アニメや SF映画では,HMD映像上でタップ,フリック,ピンチなど直接操作する光景がよく見られる.実世界においてもそのような直観的な操作方法は実用的であるため,本研究では,HMDに映し出される文字や画像などのオブジェクトを直観的な方法で操作する手法について考える.光学シースルー型HMDでは,視界を確認しながら HMD
への映像を確認できるため,多くの研究が行われている.例えば,HMD映像中のオブジェクトをユーザにとって見やすい位置に配置する研究 [1] や,HMD映像中のオブジェクト上でジェスチャ入力するとそのオブジェクトを操作できるAirTarget [2] が挙げられる.後者の AirTarget は直観的な手法であるが,奥行きが考慮されていないため,オブジェクトの手前やその奥でのジェスチャでも入力可能となる点が問題である.そこで,本研究では,映像中でボタンを押したり,テキス
トをなぞるなど,シースルー型 HMDに表示されるオブジェクトを実際に触れているかのように感じさせて操作する手法について考える.
2 HMD映像に対する直接ポインティング手法光学シースルー型HMDでは,その映像とユーザの手を同
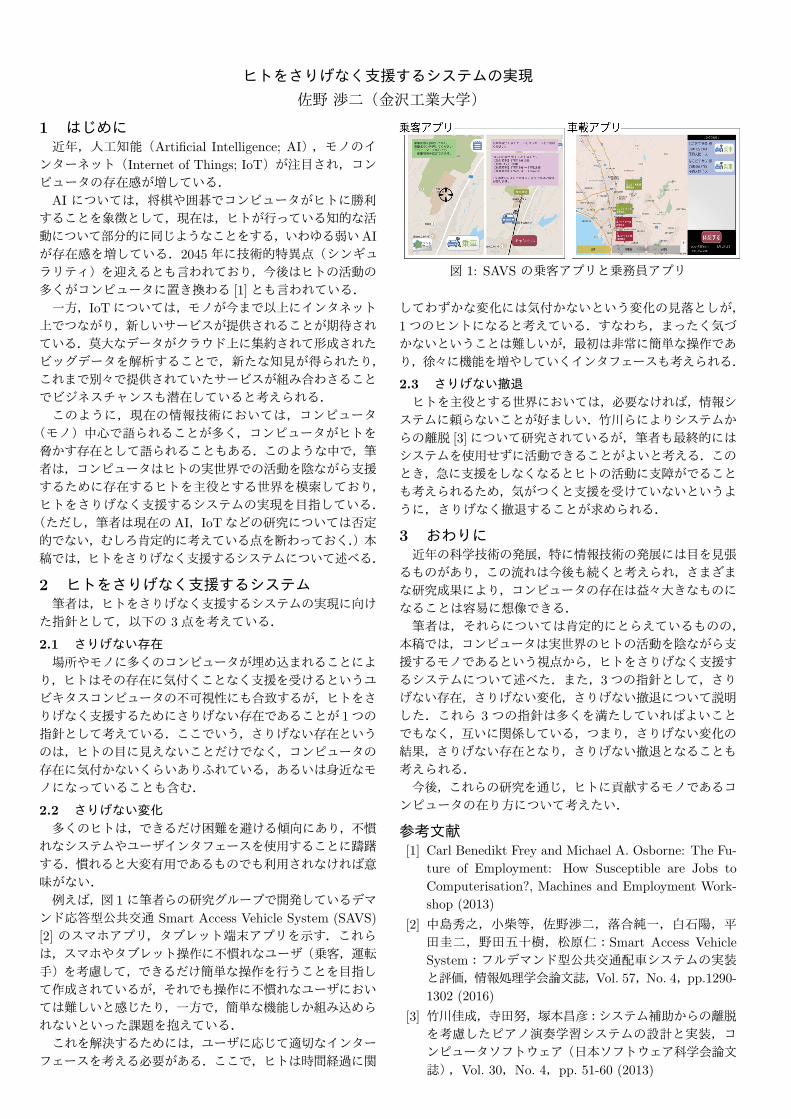
時に見ながら操作できる.このため,本研究では,HMD利用において最も直観的操作と考えられる,HMD映像中のオブジェクトにタップ,フリック,スワイプ,ピンチなど直接操作する,つまり,ユーザの手がHMD映像上のオブジェクトを触れているかのように感じながら操作する手法について考える.これを実現するために,現在,HMD映像中でユーザの手で直接ポインティングすることに取り組んでいる.HMDでは,ユーザの目から HMD 映像までの距離(以
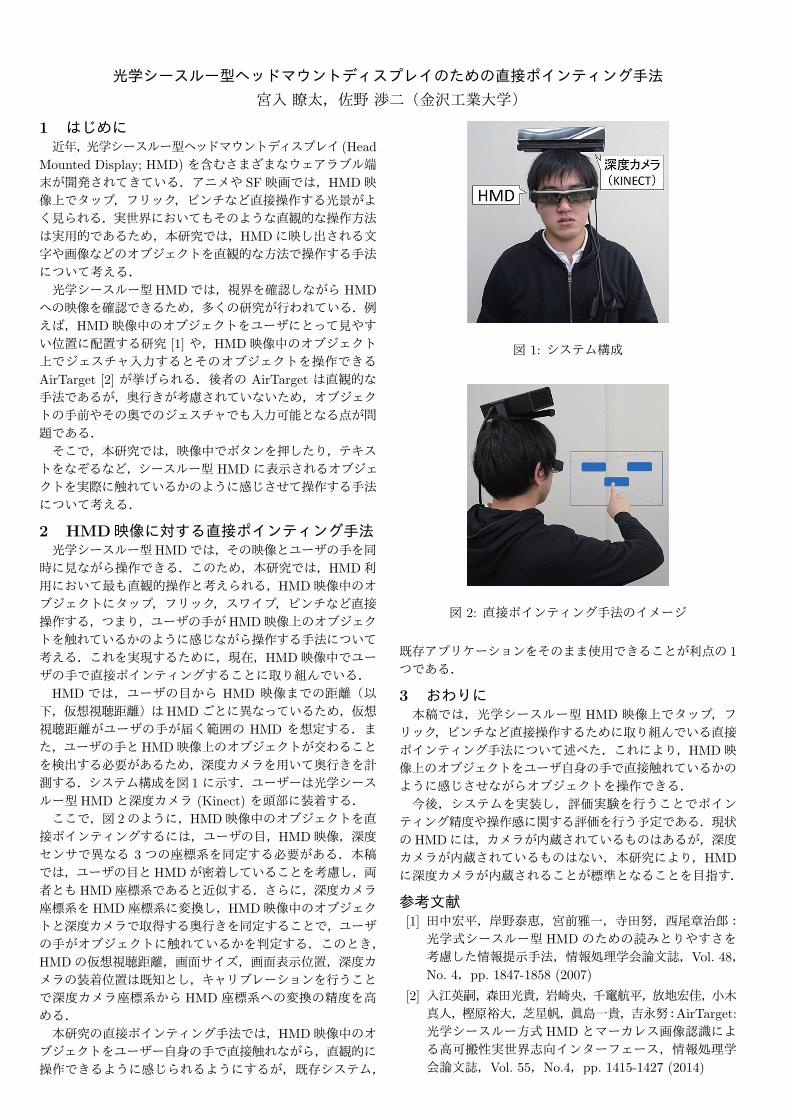
下,仮想視聴距離)はHMDごとに異なっているため,仮想視聴距離がユーザの手が届く範囲の HMD を想定する.また,ユーザの手とHMD映像上のオブジェクトが交わることを検出する必要があるため,深度カメラを用いて奥行きを計測する.システム構成を図 1 に示す.ユーザーは光学シースルー型 HMDと深度カメラ (Kinect) を頭部に装着する.ここで,図 2のように,HMD映像中のオブジェクトを直
接ポインティングするには,ユーザの目,HMD映像,深度センサで異なる 3つの座標系を同定する必要がある.本稿では,ユーザの目とHMDが密着していることを考慮し,両者ともHMD座標系であると近似する.さらに,深度カメラ座標系をHMD座標系に変換し,HMD映像中のオブジェクトと深度カメラで取得する奥行きを同定することで,ユーザの手がオブジェクトに触れているかを判定する.このとき,HMDの仮想視聴距離,画面サイズ,画面表示位置,深度カメラの装着位置は既知とし,キャリブレーションを行うことで深度カメラ座標系から HMD座標系への変換の精度を高める.本研究の直接ポインティング手法では,HMD映像中のオ
ブジェクトをユーザー自身の手で直接触れながら,直観的に操作できるように感じられるようにするが,既存システム,
図 1: システム構成
図 2: 直接ポインティング手法のイメージ
既存アプリケーションをそのまま使用できることが利点の 1
つである.
3 おわりに本稿では,光学シースルー型 HMD 映像上でタップ,フ
リック,ピンチなど直接操作するために取り組んでいる直接ポインティング手法について述べた.これにより,HMD映像上のオブジェクトをユーザ自身の手で直接触れているかのように感じさせながらオブジェクトを操作できる.今後,システムを実装し,評価実験を行うことでポイン
ティング精度や操作感に関する評価を行う予定である.現状のHMDには,カメラが内蔵されているものはあるが,深度カメラが内蔵されているものはない.本研究により,HMD
に深度カメラが内蔵されることが標準となることを目指す.
参考文献[1] 田中宏平,岸野泰恵,宮前雅一,寺田努,西尾章治郎:光学式シースルー型 HMDのための読みとりやすさを考慮した情報提示手法,情報処理学会論文誌,Vol. 48,No. 4,pp. 1847-1858 (2007)
[2] 入江英嗣,森田光貴,岩崎央,千竃航平,放地宏佳,小木真人,樫原裕大,芝星帆,眞島一貴,吉永努:AirTarget:光学シースルー方式 HMDとマーカレス画像認識による高可搬性実世界志向インターフェース,情報処理学会論文誌,Vol. 55,No.4,pp. 1415-1427 (2014)

モチーフ抽出による定義困難な行動の認識
村尾和哉(立命館大学)
1 研究の背景業務用・民生用を問わず数多く登場しているウェアラブル
デバイスには加速度センサや角速度センサが搭載されており,センサから得られた値を解析することで,装着者の行動を認識でき,健康管理や医療支援,スポーツ,エンタテインメントなどへの応用が期待されている.人間の行動を解析する手法では一般的に,認識対象となる動作があらかじめ定義されている必要がある.例えば,歩行を認識したい場合,歩行とは右足と左足を交互に動かして移動する動作と定義でき,センサを装着したユーザに実際に歩いてもらえばデータを採取できる.一方で,我々人間の行動には以下に挙げるような明確に定義できないものが存在する.特徴的な動作の系列から構成される行動 食事,スポーツ,レジャーなどの動作は,言葉では理解できるが,明確に定義できない.例えばバドミントンではスマッシュなどの特徴的な動作が行われるが,スマッシュをしている極めて短い時間だけバドミントンをしている判断するのは誤りである.すべての特徴的動作を網羅的に定義することは可能であるが,極めて大きな時間と労力を要する.事前に正解の定義ができない行動 試験中の学生のカンニング行為のように,事前に定義できない行動がある.すべてのカンニング行為を事前に定義することは現実的には不可能である.他人,あるいは自己との比較によって明確になる行動 人間の癖は,他人と異なり,本人は何度も繰り返す行為である.異なる人物間および同一人物間のデータの比較によって発見できるため,特定の人物の癖を事前に定義できない.事前に正解データを収集できない行動 糖尿病患者のインシュリン投与のような動作はある程度網羅的に定義できるが,事前に実際に投与して正解データを収集することは困難である.実生活でデータを採取すれば,動作のデータを収集できるが,動作を行った時刻まで取得することは現実的には困難な場合が多い.本稿では,上記一点目の特徴的な動作の系列から構成され
る行動を認識する手法について述べる.
2 関連研究センサデータに含まれる特徴的な部分波形をモチーフと
して抽出する手法 [1]が提案されている.この手法をバドミントンを行っているデータに適用すると,バドミントンのモチーフが抽出される.しかし,立って相手の攻撃を待っている状態や,ハーフタイムに歩く動作もモチーフとして抽出される.この手法で抽出されたモチーフをもとに動作認識を行うと,バドミントンは正しく検出されるが,立つ,歩くなどの日常的な動作も誤検出されてしまう.Tamら [2]は歩行や手洗いなどの時系列上の一定期間内に発生した動作の集合を文書とみなしてトピックモデルを適用し,トピックの尤度を時系列で得ることで,食事や通勤など意味的に上位の行動を認識する手法を提案している.トピックは自動的に生成されるが,各トピックが何の行動を意味しているかは不明であるため,人間が文書中の動作の集合を見ながら解釈する必要がある.また,文書を構成する動作をも定義する必要がある.このように従来手法では,認識対象の行動が行われている
間のデータから,その行動を特徴づける動作のみを抽出することはできない.
500400300200100
0 21:00 00:00 03:00 06:00 09:00 12:00 15:00 18:00
Density
of m
otif fou
nd
時刻
図 1: 検出されたモチーフの時間変化
3 提案手法本稿では,ユーザは常時ウェアラブル端末を装着してセンサデータを収集し,学習に使用するデータには,認識対象の行動が行われている区間の情報が付与されていると想定する.提案手法では,まず従来手法と同様にセンサデータを量子化してシンボル列を得る.具体的には PLA (Pairwise Linear
Approximation)の一種である SWAB (Sliding-Window and
Bottom-up)を加速度データに適用して線形近似する.これにより,微小な変動や線形に変化している間の冗長なデータを除去できる.その後,SAX (Symbolic Aggregate Approx-
imation)を用いて数値を量子化してシンボルに変換する.具体的には,近似後の線分の傾きを 5段階で表現し,連続する2本の線分のペアの段階の 25通りの組合せをAからYのアルファベットで表現する.これにより,センサ値の僅かな違いは同一とみなすことで,人間の動作の再現性が低さを吸収する.この処理によって,加速度時系列データはシンボル列となる.そして,従来手法と同様に Suffix Treeを用いてこのシンボル列に含まれる部分シンボル列を抽出するが,対象の動作が行われている区間から抽出される部分シンボル列の集合には,日常的に行われる動作に由来するものも含まれる.そのため,提案手法では学習データ全体の区間を [t, T ]として,対象の行動が行われている区間 [Ts, Te]から部分シンボル列の集合をXを抽出する.同様に,区間 [0, Ts]および [Te, T ]
から部分シンボル列の集合Y1,Y2をそれぞれ抽出する.ここで,Xには対象の動作と対象外の動作が,Y1およびY2
には対象外の動作のみが含まれている.Z = X− (Y1+Y2)
の集合演算を行うことで,Xから対象外の動作を除去できる.最後に,未知の加速度時系列データを上記の手順で変換したシンボル列に対して,Zに含まれるシンボル列の検索を行い,検出された回数をスライディングウィンドウの和を取ると図 1に示す波形が得られる.網がけされた領域は対象の動作を行っている期間であり,その区間でのみ値が高くなっていることから,閾値で区切ることで対象の行動のみを抽出できることがわかる.
4 おわりに本研究では,特徴的な動作の系列から構成される定義困難な行動を認識する手法を提案した.今後は,事前に正解データを収集できない行動を認識する手法を提案する.
参考文献[1] D. Minnen, et al.: Discovering Characteristic Ac-
tions from On-Body Sensor Data, ISWC’06, pp. 11–18
(2006).
[2] T. Huyh, et al.: Discovery of activity patterns using
topic models, UbiComp’08, pp. 10–19 (2008).
ヒトをさりげなく支援するシステムの実現
佐野 渉二(金沢工業大学)
1 はじめに近年,人工知能(Artificial Intelligence; AI),モノのイ
ンターネット(Internet of Things; IoT)が注目され,コンピュータの存在感が増している.AI については,将棋や囲碁でコンピュータがヒトに勝利
することを象徴として,現在は,ヒトが行っている知的な活動について部分的に同じようなことをする,いわゆる弱いAI
が存在感を増している.2045年に技術的特異点(シンギュラリティ)を迎えるとも言われており,今後はヒトの活動の多くがコンピュータに置き換わる [1]とも言われている.一方,IoTについては,モノが今まで以上にインタネット
上でつながり,新しいサービスが提供されることが期待されている.莫大なデータがクラウド上に集約されて形成されたビッグデータを解析することで,新たな知見が得られたり,これまで別々で提供されていたサービスが組み合わさることでビジネスチャンスも潜在していると考えられる.このように,現在の情報技術においては,コンピュータ
(モノ)中心で語られることが多く,コンピュータがヒトを脅かす存在として語られることもある.このような中で,筆者は,コンピュータはヒトの実世界での活動を陰ながら支援するために存在するヒトを主役とする世界を模索しており,ヒトをさりげなく支援するシステムの実現を目指している.(ただし,筆者は現在のAI,IoTなどの研究については否定的でない,むしろ肯定的に考えている点を断わっておく.)本稿では,ヒトをさりげなく支援するシステムについて述べる.
2 ヒトをさりげなく支援するシステム筆者は,ヒトをさりげなく支援するシステムの実現に向け
た指針として,以下の 3点を考えている.
2.1 さりげない存在場所やモノに多くのコンピュータが埋め込まれることによ
り,ヒトはその存在に気付くことなく支援を受けるというユビキタスコンピュータの不可視性にも合致するが,ヒトをさりげなく支援するためにさりげない存在であることが 1つの指針として考えている.ここでいう,さりげない存在というのは,ヒトの目に見えないことだけでなく,コンピュータの存在に気付かないくらいありふれている,あるいは身近なモノになっていることも含む.
2.2 さりげない変化多くのヒトは,できるだけ困難を避ける傾向にあり,不慣
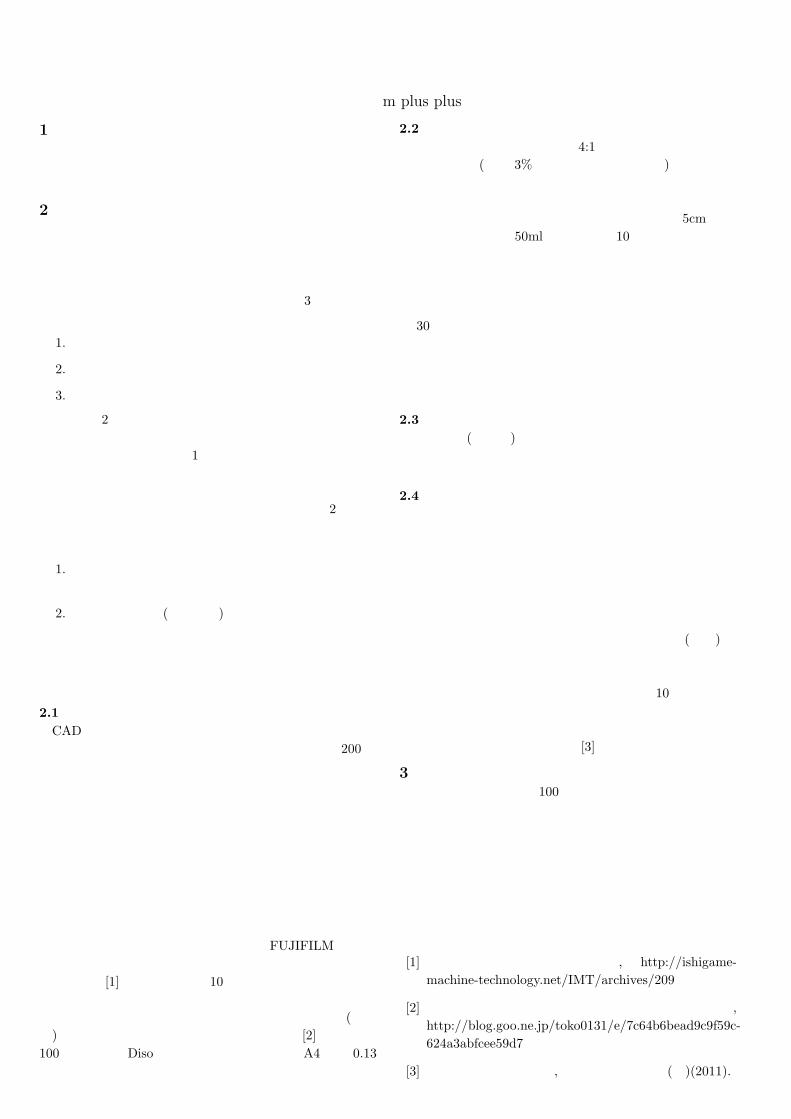
れなシステムやユーザインタフェースを使用することに躊躇する.慣れると大変有用であるものでも利用されなければ意味がない.例えば,図 1 に筆者らの研究グループで開発しているデマ
ンド応答型公共交通 Smart Access Vehicle System (SAVS)
[2] のスマホアプリ,タブレット端末アプリを示す.これらは,スマホやタブレット操作に不慣れなユーザ(乗客,運転手)を考慮して,できるだけ簡単な操作を行うことを目指して作成されているが,それでも操作に不慣れなユーザにおいては難しいと感じたり,一方で,簡単な機能しか組み込められないといった課題を抱えている.これを解決するためには,ユーザに応じて適切なインター
フェースを考える必要がある.ここで,ヒトは時間経過に関
図 1: SAVS の乗客アプリと乗務員アプリ
してわずかな変化には気付かないという変化の見落としが,1つのヒントになると考えている.すなわち,まったく気づかないということは難しいが,最初は非常に簡単な操作であり,徐々に機能を増やしていくインタフェースも考えられる.
2.3 さりげない撤退ヒトを主役とする世界においては,必要なければ,情報シ
ステムに頼らないことが好ましい.竹川らによりシステムからの離脱 [3]について研究されているが,筆者も最終的にはシステムを使用せずに活動できることがよいと考える.このとき,急に支援をしなくなるとヒトの活動に支障がでることも考えられるため,気がつくと支援を受けていないというように,さりげなく撤退することが求められる.
3 おわりに近年の科学技術の発展,特に情報技術の発展には目を見張
るものがあり,この流れは今後も続くと考えられ,さまざまな研究成果により,コンピュータの存在は益々大きなものになることは容易に想像できる.筆者は,それらについては肯定的にとらえているものの,
本稿では,コンピュータは実世界のヒトの活動を陰ながら支援するモノであるという視点から,ヒトをさりげなく支援するシステムについて述べた.また,3つの指針として,さりげない存在,さりげない変化,さりげない撤退について説明した.これら 3つの指針は多くを満たしていればよいことでもなく,互いに関係している,つまり,さりげない変化の結果,さりげない存在となり,さりげない撤退となることも考えられる.今後,これらの研究を通じ,ヒトに貢献するモノであるコ
ンピュータの在り方について考えたい.
参考文献[1] Carl Benedikt Frey and Michael A. Osborne: The Fu-
ture of Employment: How Susceptible are Jobs to
Computerisation?, Machines and Employment Work-
shop (2013)
[2] 中島秀之,小柴等,佐野渉二,落合純一,白石陽,平田圭二,野田五十樹,松原仁:Smart Access Vehicle
System:フルデマンド型公共交通配車システムの実装と評価,情報処理学会論文誌,Vol. 57,No. 4,pp.1290-1302 (2016)
[3] 竹川佳成,寺田努,塚本昌彦:システム補助からの離脱を考慮したピアノ演奏学習システムの設計と実装,コンピュータソフトウェア(日本ソフトウェア科学会論文誌),Vol. 30,No. 4,pp. 51-60 (2013)

ウェアラブルデバイスのための衣服間無線電力供給に関する一検討
大村 廉(豊橋技術科学大学),宮村 騎久也(豊橋技術科学大学)
1. 研究の背景と目的
ウェアラブルデバイスにおける電源は,デバイスのサイズ
や稼働時間に影響し,その利便性やデザイン性に大きく影響
を与える.現在のウェアラブルデバイスでは電源として,個々
にバッテリを持つことが一般的となっている.しかし,装着
するウェアラブルデバイスが多くなった場合,個々に充電す
る必要が生じ,その手間は大きくなる.また,特に長時間利
用することが望まれるデバイスでは,小型・軽量化すること
が難しくなり,装着場所によっては装着すること自体が困難
となることも考えられる. 他方,一つの電源を腰などの比較
的重さの感じ憎い場所に装着し,この電力を分配することが
考えられる.この方法では,充電の手間などの日々のメンテ
ナンス性を大きく改善することができる.しかし,電力を分
配するウェアラブルデバイスをそれぞれ有線で接続すること
は,著しく装着者の行動を阻害することとなってしまう.
そこで,我々は無線電力供給技術[1]を用いて衣類間,ある
いは,(必要に応じて)衣類およびデバイス間で電力搬送を行
うことを検討している.まず,上記のよう,腰回りに大型の
電力を設置することを想定し,ズボンとシャツの間で電力伝
送を行うことを考える.本発表では,まずベースラインの計
測として行った実験について,その方法と結果を報告する.
2. 実験
本研究では,まず,ズボンとシャツの間にコイルを生成し,
ズボンからの電力をシャツに伝送することの可能性について
検討を行った.電力搬送技術として,伝送距離が長く,比較
的コイル同士のずれにも強い磁界共鳴方式を選択した.そし
て,フェルト生地上に銅箔を用いてコイルを構成し,その伝
送効率の測定を行った.
この時作成したコイルの組み合わせを図 1 に示す.縦単一
コイル条件のズボン側(1次側)コイルでは,100mm×
100mm,巻き数 6 のコイルとした.また,シャツ側(2 次側)
コイルでは 180mm×180mm,巻き数 6 のコイルとした.ア
レーコイル条件では,ズボン側は単一コイル条件と同一とし,
シャツ側コイルでは,100mm×100mm,巻き数 6 のコイル
を 3 つ横に並べた.横コイル条件では,ズボン側コイル,お
よび,シャツ側コイルとしてそれぞれ直径 200mm の胴回り
に巻き数 6 のコイルを作成した.それぞれコイルは 2mm の
銅箔で作成し,銅箔間の間隔も 2mm とした.また,これら
のコイルはズボン側を直径 20cm の円筒に巻き付け,シャツ
側コイルは 25cm~40cm のコイルに巻き付けた.
3. 実験結果
これらのコイルを用い,ネットワークアナライザを用いて
伝送効率を測定した.紙面の都合上,縦単一コイルについて
のみ,図 2 に結果を示す.それぞれ,縦軸は縦ずれ(cm),横
軸は横ずれ(cm)を表し,効率を色で表している(紫:0%←→
赤:80%).ギャップ 4.5cm,縦ずれ,横ずれがそれぞれ 0cm の
時に効率が最大となり,70%程度の効率が得られることがわか
った.一方,ギャップ 0cm,2cm の時はむしろ 15cm ほど縦も
しくは横にずれている方が効率が良いことがわかった.
4. 今後の予定
今回,ベースラインとして,3つのコイルパターンにおけ
る伝送効率を測定した.今後,コイル形状をより衣類に組み
込みやすい形にするとともに,素材を導電繊維などに変更し
て適した条件を明らかにしていく予定である.
参考文献
[1] 庄木 裕樹,ワイヤレス電力伝送技術が社会を変える,
電子情報通信学会 通信ソサイエティマガジン Vol. 7,No. 1,pp. 13-18 (2013).
図 1 コイルパターン
a) 縦単一コイル b) アレーコイル c) 横コイル
図 2 単一コイルの実験結果
左上:ギャップ 0cm
左 :ギャップ 2cm
右上:ギャップ 4.5cm
エッチングによるプリント基板の安価な作成手法
柳沢 豊(神戸大学、m plus plus 株式会社)
1 概要本稿では、身の回りにある機材と薬品を使ってプリント基
板を安価に製作できる、近年注目されている新たなエッチング手法について述べる。
2 エッチングエッチングとは一般に、銅箔を強酸などで腐食するという
化学的な手法を用いて、絵や文字などを描く技法のことである。元来、銅版画の製作手法として広まったものであるが、電子基板のパターン配線を生成する方式としても広く用いられている。エッチングによる基板製作は、次の 3つの工程によって行なわれる。
1. 銅箔上へのパターンのプリント
2. 腐食剤を用いた銅箔の除去
3. レジストの除去
従来は、2 の工程で塩化第二鉄液という有害な溶液を使用するため、家庭や研究室などでは気軽にエッチングを行なうことができなかった。また 1の工程においても、感光法という特殊な薬品や装置が必要な手法が用いられ、プリントにも時間がかかるという問題があった。これらの問題を解決する方法として、近年下記の 2つ方法
を用いたエッチングによるプリント基板の作成方式が注目されている。
1. 腐食液として、無害なクエン酸、塩化ナトリウム、オキシドールの混合液を用いる。
2. パターン保護剤 (レジスト)としてレーザプリンタのトナーを利用し、家庭用のアイロンを用いてトナーを熱転写する。
以下では、実際にこれらの方式を用いてプリント基板を製作する方法について述べる。
2.1 レーザープリンタを用いたパターン転写CAD で作成した配線図を、レーザープリンタでポジ印刷
する。次に印刷した用紙を生基板の上に重ね、上から 200度以上に設定したアイロンで当て布越しに圧力をかけて、トナーを銅箔上に転写する。転写に使用した紙は銅箔に張りつくため、基板ごと水に浸して紙を除去する。紙を除去したら、パターンの転写漏れがないかを点検し、必要に応じてレジストペンを使って修正を行なう。転写を行なうとき、印刷する用紙の種類によって転写の精
度が大きく変わることが知られている。用紙に求められる性質には、トナーが内部に染みこまないこと、銅箔へのはりつきが少ないこと、除去が容易であること、熱を加えたときにトナーが剥離しやすいこと、といった複数の要件がある。これらを満たす用紙として、現時点では「FUJIFILM マット紙「画彩」スーパーファイン仕上げ」が最良であるとの研究報告がある [1]。実際に筆者も 10種類以上の上質紙、光沢紙を用いて実験を行なったが、前述の用紙が最も転写に適していた。なお、日本郵便の宛名シールを剥したあとの紙 (剥離紙)が極めて良好であるという研究報告もある [2] 。さらに、100円ショップ Diso で販売される「マット紙 A4薄口 0.13
mm」の性能も良好であるとの研究もある。
2.2 クエン酸を用いたエッチング腐食液は、クエン酸と食塩を 4:1 の割合で混合し、これをオキシドール (濃度 3% 程度の過酸化水素溶液)で溶かして作る。このとき、クエン酸と食塩の飽和溶液となるように、オキシドールの分量を調整する。オキシドールの分量が多すぎると、銅板が十分に腐食されないことがある。5cm 角程度の基板であれば、50ml の腐食液で 10 分程度でエッチングできる。なお、腐食が進んだときに発生する独特の臭気の拡散を防ぐためと、基板が完全に腐食液に浸るようにするために、チャック付きのビニール袋などに腐食液を入れ、その袋に基板が完全に浸るようにすると良い。腐食液はあらかじめ 30 度程度に加熱しておくと、エッチングがよく進む。順調にエッチングが進んだときは、溶液の色は青色に近い緑色になる。青みが薄い緑色になるときは、オキシドールの分量がクエン酸に対して多すぎ、エッチングが順調に進んでいないことが多い。
2.3 レジスト除去レジスト (トナー)の除去には、メラミン製の洗浄用スポンジを用いると効率的である。筆者の実験によれば、ノーマルタイプの「激落ち君」が最も洗浄能力が高かった。
2.4 廃液処理エッチングを行なったあとの廃液には、アルミ箔を投じて処理する。アルミを投じることで、銅とのイオン化傾向の差から溶液中に銅が析出する。アルミの溶解反応で大きな熱が出るため、アルミは少量ずつ投じたほうがよい。溶液が透明になり、アルミを追加投入してもアルミが溶けなくなったら、コーヒーフィルタなどを使用して濾過し、析出した銅等の残渣を除去する。残渣については、金属ゴミとして廃棄を行なう。濾過後の廃液には、炭酸水素ナトリウム (重曹)を投じて中和する。このとき、反応によって炭酸ガスが生じ、大量の気泡が発生するため、少量ずつ投入するのがよい。炭酸水素ナトリウムが溶けなくなった時点で、10倍程度の水で希釈して廃棄する。なお、最終的な廃液にはアルミニウムイオンが含まれているが、アルミニウムについては現時点で環境基準等は設けられていない [3]。
3 おわりに本稿で述べた方法は、100円ショップで購入可能な液剤のみでエッチングを行なうことが可能である。小数の基板を試作する場合、基板製造業者に依頼するよりも高速かつ安価に作成できる。ユニバーサル基板上への実装が難しい、表面実装部品を使用した電子基板を試作する手法としては、極めて有効な方法であると考えている。今後の課題としては、転写する用紙がパターンの転写精度に大きく影響するため、よりよい転写用紙を発見することが挙げられる。
参考文献[1] 俺的プリント基板エッチング, http://ishigame-
machine-technology.net/IMT/archives/209
[2] 剥 離 紙 を 使って プ リ ン ト 基 板 を 作 る,
http://blog.goo.ne.jp/toko0131/e/7c64b6bead9c9f59c-
624a3abfcee59d7
[3] 国土交通省水質連絡会, 河川水質試験方法 (案)(2011).
足圧分布センサを用いた姿勢推定手法
大西鮎美 (神戸大), 村尾和哉 (立命館大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的ウェアラブル環境では,身体にセンサを多く取り付けるこ
とで,より詳細に人の動作データを取得することが可能だが,複数の機器の装着には手間やコストがかかり,機器の充電などもシステム使用者にとって負担となる.複数の機器を装着することなく,日常的に着用するシューズのみから足以外の情報である姿勢などを推定できれば,より快適で,広範囲なサービスに応用が可能となる.Zhouらのサッカーシューズに取り付けた圧力センサからボールを蹴る方向を推定する研究 [1]など,シューズを用いたセンシング例は多くあるが,足以外の身体の状態については詳細に検討されていない.そこで本研究では,シューズの足裏圧力のセンシングで少ないセンサ数で姿勢や動作を取得するため,姿勢のなかでも基礎的な計測項目について認識精度を評価し,最適な計測点を検討することを目的とする.
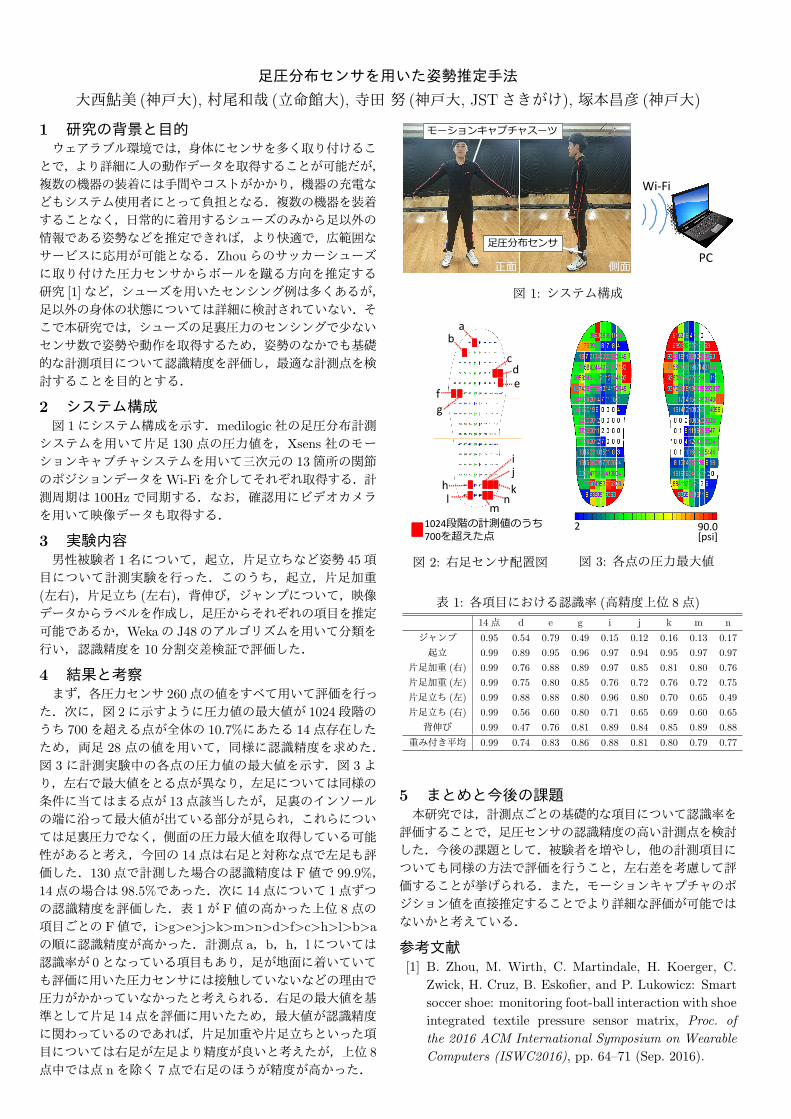
2 システム構成図 1にシステム構成を示す.medilogic社の足圧分布計測
システムを用いて片足 130 点の圧力値を,Xsens 社のモーションキャプチャシステムを用いて三次元の 13箇所の関節のポジションデータをWi-Fiを介してそれぞれ取得する.計測周期は 100Hzで同期する.なお,確認用にビデオカメラを用いて映像データも取得する.
3 実験内容男性被験者 1名について,起立,片足立ちなど姿勢 45項
目について計測実験を行った.このうち,起立,片足加重(左右),片足立ち (左右),背伸び,ジャンプについて,映像データからラベルを作成し,足圧からそれぞれの項目を推定可能であるか,Wekaの J48のアルゴリズムを用いて分類を行い,認識精度を 10分割交差検証で評価した.
4 結果と考察まず,各圧力センサ 260点の値をすべて用いて評価を行った.次に,図 2に示すように圧力値の最大値が 1024段階のうち 700を超える点が全体の 10.7%にあたる 14点存在したため,両足 28 点の値を用いて,同様に認識精度を求めた.図 3に計測実験中の各点の圧力値の最大値を示す.図 3より,左右で最大値をとる点が異なり,左足については同様の条件に当てはまる点が 13点該当したが,足裏のインソールの端に沿って最大値が出ている部分が見られ,これらについては足裏圧力でなく,側面の圧力最大値を取得している可能性があると考え,今回の 14点は右足と対称な点で左足も評価した.130点で計測した場合の認識精度は F値で 99.9%,14点の場合は 98.5%であった.次に 14点について 1点ずつの認識精度を評価した.表 1が F値の高かった上位 8点の項目ごとの F値で,i>g>e>j>k>m>n>d>f>c>h>l>b>a
の順に認識精度が高かった.計測点 a,b,h,lについては認識率が 0となっている項目もあり,足が地面に着いていても評価に用いた圧力センサには接触していないなどの理由で圧力がかかっていなかったと考えられる.右足の最大値を基準として片足 14点を評価に用いたため,最大値が認識精度に関わっているのであれば,片足加重や片足立ちといった項目については右足が左足より精度が良いと考えたが,上位 8
点中では点 nを除く 7点で右足のほうが精度が高かった.
足圧分布センサ
モーションキャプチャスーツ
正面 側面
Wi-Fi
PC
図 1: システム構成
1024段階の計測値のうち
700を超えた点
ab
f
g
cd
e
k
j
n
i
m
h
l
図 2: 右足センサ配置図
2 90.0[psi]
図 3: 各点の圧力最大値
表 1: 各項目における認識率 (高精度上位 8点)
14点 d e g i j k m n
ジャンプ 0.95 0.54 0.79 0.49 0.15 0.12 0.16 0.13 0.17
起立 0.99 0.89 0.95 0.96 0.97 0.94 0.95 0.97 0.97
片足加重 (右) 0.99 0.76 0.88 0.89 0.97 0.85 0.81 0.80 0.76
片足加重 (左) 0.99 0.75 0.80 0.85 0.76 0.72 0.76 0.72 0.75
片足立ち (左) 0.99 0.88 0.88 0.80 0.96 0.80 0.70 0.65 0.49
片足立ち (右) 0.99 0.56 0.60 0.80 0.71 0.65 0.69 0.60 0.65
背伸び 0.99 0.47 0.76 0.81 0.89 0.84 0.85 0.89 0.88
重み付き平均 0.99 0.74 0.83 0.86 0.88 0.81 0.80 0.79 0.77
5 まとめと今後の課題本研究では,計測点ごとの基礎的な項目について認識率を評価することで,足圧センサの認識精度の高い計測点を検討した.今後の課題として.被験者を増やし,他の計測項目についても同様の方法で評価を行うこと,左右差を考慮して評価することが挙げられる.また,モーションキャプチャのポジション値を直接推定することでより詳細な評価が可能ではないかと考えている.
参考文献[1] B. Zhou, M. Wirth, C. Martindale, H. Koerger, C.
Zwick, H. Cruz, B. Eskofier, and P. Lukowicz: Smart
soccer shoe: monitoring foot-ball interaction with shoe
integrated textile pressure sensor matrix, Proc. of
the 2016 ACM International Symposium on Wearable
Computers (ISWC2016), pp. 64–71 (Sep. 2016).
ジェスチャの早期認識に関するジェスチャ波形の一考察
出田 怜(神戸大),村尾和哉(立命館大),寺田 努(神戸大,JSTさきがけ),塚本昌彦(神戸大)
1 研究の背景と目的近年,iPhoneやAndroid端末などの携帯端末やWiiなど
の家庭用ゲーム機器のコントローラに加速度センサが内蔵され,センサの値から端末の傾きや動きを検知して,ブラウザのスクロールなどの直観的操作や立体図形描画などが可能になり,従来のインタフェースでは困難であった入力を実現している.加速度センサを用いたジェスチャ認識では,認識処理をジェスチャ終了後に開始するため,認識結果に応じたフィードバックの出力までに遅延が生じる.インタフェースにおいてこの遅延は操作性の低下につながると考えられる.出田らはジェスチャ認識における出力の遅延を考慮した早期認識アルゴリズムを提案し,27種類のジェスチャに対して評価を行っている [1].加速度センサから得られる動作データを学習データと逐次的に距離計算を行い,他の認識候補と相対的に比較する事で,認識結果の出力のタイミングを決定している.出力のタイミングを制御する事で,高精度でかつジェスチャの途中で認識する事ができるが,「円を描く」や「四角を描く」など,他のジェスチャに比べて途中で認識する事が困難なジェスチャも存在した.早期認識技術は対象とするジェスチャの組み合わせによって認識精度が低下する恐れがある.従って,本論文では携帯端末での使用を想定したジェスチャの中で,早期に認識しやすいジェスチャについて分析を行う.
2 携帯端末での使用を想定したジェスチャの分析ジェスチャの早期認識の認識精度に影響を与える要素とし
て,以下の 2点が挙げられる.
• 認識対象とするジェスチャの組み合わせ
• 認識処理を行うタイミング
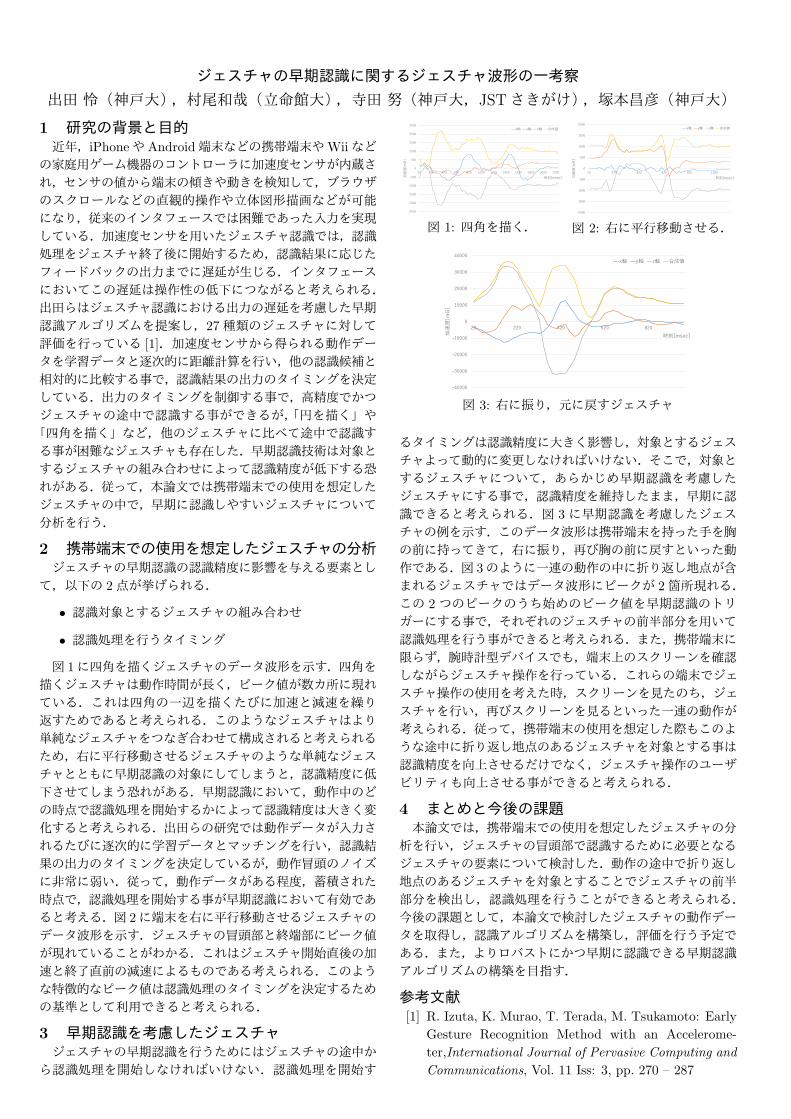
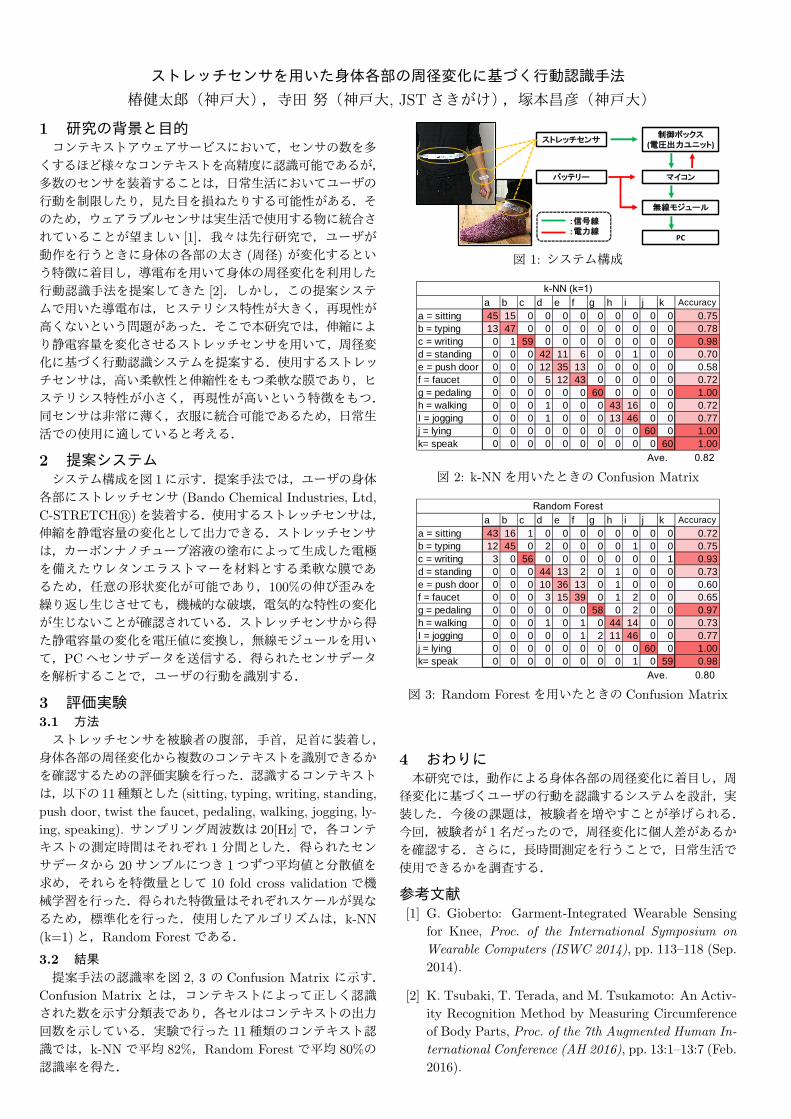
図 1に四角を描くジェスチャのデータ波形を示す.四角を描くジェスチャは動作時間が長く,ピーク値が数カ所に現れている.これは四角の一辺を描くたびに加速と減速を繰り返すためであると考えられる.このようなジェスチャはより単純なジェスチャをつなぎ合わせて構成されると考えられるため,右に平行移動させるジェスチャのような単純なジェスチャとともに早期認識の対象にしてしまうと,認識精度に低下させてしまう恐れがある.早期認識において,動作中のどの時点で認識処理を開始するかによって認識精度は大きく変化すると考えられる.出田らの研究では動作データが入力されるたびに逐次的に学習データとマッチングを行い,認識結果の出力のタイミングを決定しているが,動作冒頭のノイズに非常に弱い.従って,動作データがある程度,蓄積された時点で,認識処理を開始する事が早期認識において有効であると考える.図 2に端末を右に平行移動させるジェスチャのデータ波形を示す.ジェスチャの冒頭部と終端部にピーク値が現れていることがわかる.これはジェスチャ開始直後の加速と終了直前の減速によるものである考えられる.このような特徴的なピーク値は認識処理のタイミングを決定するための基準として利用できると考えられる.
3 早期認識を考慮したジェスチャジェスチャの早期認識を行うためにはジェスチャの途中か
ら認識処理を開始しなければいけない.認識処理を開始す
!"#$$
!"$$$
!%#$$
!%$$$
!#$$
$
#$$
%$$$
%#$$
"$$$
"#$$
"$ ""$ &"$ '"$ ("$ %$"$ %""$ %&"$ %'"$ %("$ "$"$ """$
)*+,-./
01,-234/
56 76 86 9:;
図 1: 四角を描く.!"###
!$%##
!$###
!%##
#
%##
$###
$%##
"###
"# ""# &"# '"# ("# $#"#
)*+,-./
01,-234/
56 76 86 9:;
図 2: 右に平行移動させる.
!"####
!$####
!%####
!&####
#
&####
%####
$####
"####
%# %%# "%# '%# (%#
)*+,-./
01,-234/
56 76 86 9:;
図 3: 右に振り,元に戻すジェスチャ
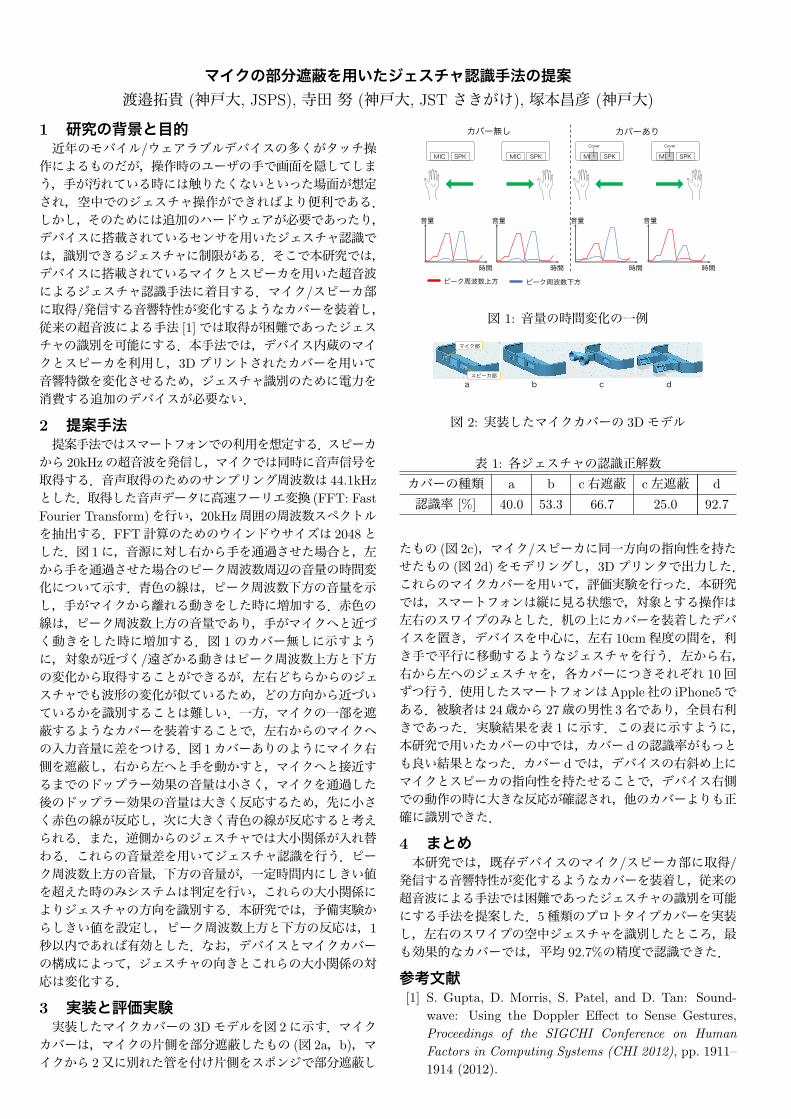
るタイミングは認識精度に大きく影響し,対象とするジェスチャよって動的に変更しなければいけない.そこで,対象とするジェスチャについて,あらかじめ早期認識を考慮したジェスチャにする事で,認識精度を維持したまま,早期に認識できると考えられる.図 3に早期認識を考慮したジェスチャの例を示す.このデータ波形は携帯端末を持った手を胸の前に持ってきて,右に振り,再び胸の前に戻すといった動作である.図 3のように一連の動作の中に折り返し地点が含まれるジェスチャではデータ波形にピークが 2箇所現れる.この 2つのピークのうち始めのピーク値を早期認識のトリガーにする事で,それぞれのジェスチャの前半部分を用いて認識処理を行う事ができると考えられる.また,携帯端末に限らず,腕時計型デバイスでも,端末上のスクリーンを確認しながらジェスチャ操作を行っている.これらの端末でジェスチャ操作の使用を考えた時,スクリーンを見たのち,ジェスチャを行い,再びスクリーンを見るといった一連の動作が考えられる.従って,携帯端末の使用を想定した際もこのような途中に折り返し地点のあるジェスチャを対象とする事は認識精度を向上させるだけでなく,ジェスチャ操作のユーザビリティも向上させる事ができると考えられる.
4 まとめと今後の課題本論文では,携帯端末での使用を想定したジェスチャの分
析を行い,ジェスチャの冒頭部で認識するために必要となるジェスチャの要素について検討した.動作の途中で折り返し地点のあるジェスチャを対象とすることでジェスチャの前半部分を検出し,認識処理を行うことができると考えられる.今後の課題として,本論文で検討したジェスチャの動作データを取得し,認識アルゴリズムを構築し,評価を行う予定である.また,よりロバストにかつ早期に認識できる早期認識アルゴリズムの構築を目指す.
参考文献[1] R. Izuta, K. Murao, T. Terada, M. Tsukamoto: Early
Gesture Recognition Method with an Accelerome-
ter,International Journal of Pervasive Computing and
Communications, Vol. 11 Iss: 3, pp. 270 – 287
ストレッチセンサを用いた身体各部の周径変化に基づく行動認識手法
椿健太郎(神戸大),寺田 努(神戸大, JSTさきがけ),塚本昌彦(神戸大)
1 研究の背景と目的コンテキストアウェアサービスにおいて,センサの数を多
くするほど様々なコンテキストを高精度に認識可能であるが,多数のセンサを装着することは,日常生活においてユーザの行動を制限したり,見た目を損ねたりする可能性がある.そのため,ウェアラブルセンサは実生活で使用する物に統合されていることが望ましい [1].我々は先行研究で,ユーザが動作を行うときに身体の各部の太さ (周径) が変化するという特徴に着目し,導電布を用いて身体の周径変化を利用した行動認識手法を提案してきた [2].しかし,この提案システムで用いた導電布は,ヒステリシス特性が大きく,再現性が高くないという問題があった.そこで本研究では,伸縮により静電容量を変化させるストレッチセンサを用いて,周径変化に基づく行動認識システムを提案する.使用するストレッチセンサは,高い柔軟性と伸縮性をもつ柔軟な膜であり,ヒステリシス特性が小さく,再現性が高いという特徴をもつ.同センサは非常に薄く,衣服に統合可能であるため,日常生活での使用に適していると考える.
2 提案システムシステム構成を図 1に示す.提案手法では,ユーザの身体
各部にストレッチセンサ (Bando Chemical Industries, Ltd,
C-STRETCH R⃝)を装着する.使用するストレッチセンサは,伸縮を静電容量の変化として出力できる.ストレッチセンサは,カーボンナノチューブ溶液の塗布によって生成した電極を備えたウレタンエラストマーを材料とする柔軟な膜であるため,任意の形状変化が可能であり,100%の伸び歪みを繰り返し生じさせても,機械的な破壊,電気的な特性の変化が生じないことが確認されている.ストレッチセンサから得た静電容量の変化を電圧値に変換し,無線モジュールを用いて,PCへセンサデータを送信する.得られたセンサデータを解析することで,ユーザの行動を識別する.
3 評価実験3.1 方法ストレッチセンサを被験者の腹部,手首,足首に装着し,
身体各部の周径変化から複数のコンテキストを識別できるかを確認するための評価実験を行った.認識するコンテキストは,以下の 11種類とした (sitting, typing, writing, standing,
push door, twist the faucet, pedaling, walking, jogging, ly-
ing, speaking). サンプリング周波数は 20[Hz]で,各コンテキストの測定時間はそれぞれ 1分間とした.得られたセンサデータから 20サンプルにつき 1つずつ平均値と分散値を求め,それらを特徴量として 10 fold cross validationで機械学習を行った.得られた特徴量はそれぞれスケールが異なるため,標準化を行った.使用したアルゴリズムは,k-NN
(k=1)と,Random Forestである.
3.2 結果提案手法の認識率を図 2, 3 の Confusion Matrix に示す.
Confusion Matrix とは,コンテキストによって正しく認識された数を示す分類表であり,各セルはコンテキストの出力回数を示している.実験で行った 11種類のコンテキスト認識では,k-NNで平均 82%,Random Forestで平均 80%の認識率を得た.
��������
���� ��
��
������
����������
����
����
��� !�"
図 1: システム構成
a b c d e f g h i j k Accuracy
a = sitting 45 15 0 0 0 0 0 0 0 0 0 0.75b = typing 13 47 0 0 0 0 0 0 0 0 0 0.78c = writing 0 1 59 0 0 0 0 0 0 0 0 0.98d = standing 0 0 0 42 11 6 0 0 1 0 0 0.70e = push door 0 0 0 12 35 13 0 0 0 0 0 0.58f = faucet 0 0 0 5 12 43 0 0 0 0 0 0.72g = pedaling 0 0 0 0 0 0 60 0 0 0 0 1.00h = walking 0 0 0 1 0 0 0 43 16 0 0 0.72I = jogging 0 0 0 1 0 0 0 13 46 0 0 0.77j = lying 0 0 0 0 0 0 0 0 0 60 0 1.00k= speak 0 0 0 0 0 0 0 0 0 0 60 1.00
����
��������
���
図 2: k-NNを用いたときの Confusion Matrix
a b c d e f g h i j k Accuracy
a = sitting 43 16 1 0 0 0 0 0 0 0 0 0.72b = typing 12 45 0 2 0 0 0 0 1 0 0 0.75c = writing 3 0 56 0 0 0 0 0 0 0 1 0.93d = standing 0 0 0 44 13 2 0 1 0 0 0 0.73e = push door 0 0 0 10 36 13 0 1 0 0 0 0.60f = faucet 0 0 0 3 15 39 0 1 2 0 0 0.65g = pedaling 0 0 0 0 0 0 58 0 2 0 0 0.97h = walking 0 0 0 1 0 1 0 44 14 0 0 0.73I = jogging 0 0 0 0 0 1 2 11 46 0 0 0.77j = lying 0 0 0 0 0 0 0 0 0 60 0 1.00k= speak 0 0 0 0 0 0 0 0 1 0 59 0.98
����
�������� ��
�� �
図 3: Random Forestを用いたときの Confusion Matrix
4 おわりに本研究では,動作による身体各部の周径変化に着目し,周径変化に基づくユーザの行動を認識するシステムを設計,実装した.今後の課題は,被験者を増やすことが挙げられる.今回,被験者が 1名だったので,周径変化に個人差があるかを確認する.さらに,長時間測定を行うことで,日常生活で使用できるかを調査する.
参考文献[1] G. Gioberto: Garment-Integrated Wearable Sensing
for Knee, Proc. of the International Symposium on
Wearable Computers (ISWC 2014), pp. 113–118 (Sep.
2014).
[2] K. Tsubaki, T. Terada, and M. Tsukamoto: An Activ-
ity Recognition Method by Measuring Circumference
of Body Parts, Proc. of the 7th Augmented Human In-
ternational Conference (AH 2016), pp. 13:1–13:7 (Feb.
2016).

受講者の頭部動作と瞬きの同期に基づく講義コンテンツの重要シーン検出笠波昌昭 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年,情報通信技術の向上と普及に伴い,e-ラーニングや
オープンコースウェアのような,講義映像をインターネット上に配信・アーカイブする取組みが広く行われている.しかし,このような講義映像は録画時間が長時間に及ぶことが多く,視聴者や編集者にとって大きな負担となっている可能性が高い.そのような講義映像内での重要なシーンを自動で検出できれば,視聴者は重要なシーンのみを手短に見直すことができ,また編集者はより少ない労力で編集作業を行えると考えられる.このような講義映像のインデキシング手法として,山根らは講義中の講師と受講者の間のインタラクションを講義映像内から検出する手法を提案している [1].この手法では,講師の行動に対する複数受講者の反応として「顔上げ」動作の同期的な増加を利用している.しかし,この頭部動作以外にも講義内容に対して受講者が同期的な反応を示す可能性があると同時に,それが講義において「顔上げ」動作からは検出できない何らかの意味を持っている可能性がある.そこで本稿では,講義内の重要シーンを検出する手法を検討するために,複数受講者の受講中の頭部動作や瞬きを計測し得られたデータを調査した.
2 実験学生による研究発表会において,スライドを用いた発表を
受講する際の複数受講者の頭部動作および瞬きの同期を調査する実験を行った.2.1 実験環境この実験では,センシングデバイスとして 3軸加速度・頭
部姿勢・瞬きなどを計測できる JIN社のアイウェア,JINS
MEMEを使用した.受講した学生のうち9人がJINSMEME
を装着した.加えて,得られたデータと実際の受講者の行動を比較するために,受講中の様子を各受講者の膝上に置いたPCのインナーカメラで録画した.以降この動画を個人動画と呼ぶ.さらに,発表内容と講師の様子を記録するために会場中央にビデオカメラを設置し,発表中の学生とスクリーンを録画した.以降この動画を前方動画と呼ぶ.研究発表会は,発表者 1人あたり発表 15分質疑 10分の計 25分が与えられ,各発表者はステージ上の演台に立ち,動画コンテンツを含む PowerPointスライドを用いて研究発表を行った.実験後,センシングした全受講者のデータのグラフと個人動画,前方動画を同時に再生するアプリケーションを用いてデータの解析を行った.2.2 結果と考察センシングした 9人の受講者のうち 1人が個人動画の撮
影に失敗したため,8人分のデータを用いて解析した.発表者のうち,ある 1人が発表中の受講者 8人のデータを解析したグラフを図 1~3に示す.図 1のグラフは,1秒間隔で区切ったウィンドウ内での各受講者の加速度合成値の標準偏差を計算し,その値が閾値を超えた受講者の人数が 7人を上回ったタイミングを表す.このタイミングでの個人動画,前方動画を確認したところ,その多くの場面で会場内で笑いが巻き起こったり,拍手が行われていたことがわかった.これは,複数の受講者の笑い,拍手による小刻みな揺れを同時に検知したためである.この特徴は,あとで映像のうち盛
�
�
� ��� ��� ��� ��� ����� ����� ����� �����
�
�
�� ��
図 1: 加速度合成値が同期したタイミング
�
�
��
��
� ��� ��� ��� ��� ����� ����� ����� �����
�
�
�
�
�
�
�
�� ��
図 2: ウィンドウ内での瞬き回数の和
�
�
�
�
�
� ��� ��� ��� ��� ����� ����� ����� �����
�
�
�
�
�
�� ��
図 3: 頭部が上を向いている人数
り上がった場面を見返す際などに有用であると考えられる.図 2は,1秒間隔で区切ったウィンドウ内の全受講者の瞬きの総和を表す.発表内容による受講者の瞬き回数の変化は読み取れなかった.総和ではなく各受講者ごとに瞬きの頻度を計算するなど,解析方法について再考する必要がある.図 3
は,水平を 0度とし,頭部が 15度を超えて上を向いている受講者の人数を表す.多くの受講者が上を向いている時間帯での個人動画,前方動画を確認したところ,多くの場面でスクリーンに動画,画像のような注目性の高いコンテンツが表示されていたことがわかった.スクリーンに動画が表示されいた時間帯を図中の黄枠で示す.また,上を向いた受講者が増加した 1400秒付近,1600秒付近では,発表者がスライドの図を用いて説明を行っていた.一方,多くの受講者が下を向いている時間帯では,発表者がスライドの文章を読み上げる,スライドとは無関係な質疑が行われているなど,受講者にとってスライドの重要性が薄まっていたことがわかった.
3 まとめと今後の課題本稿では,講義コンテンツ内での重要シーン検出のために,スライド発表での受講者の頭部動作,瞬きを計測し,その特徴について考察した.今後の課題として,データから検出されたシーンと講義映像を人の手でラベル付けしたものとを比較するなど重要性の評価を予定している.
参考文献[1] 山根卓也,中村和晃,上田真由美,椋木雅之,美濃導彦: 講義中の行動分析に基づく講師受講者間インタラクションの検出, 先進的学習科学と工学研究会, Vol. 60, pp.
7–14 (2010).
マイクの部分遮蔽を用いたジェスチャ認識手法の提案渡邉拓貴 (神戸大, JSPS), 寺田 努 (神戸大, JST さきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年のモバイル/ウェアラブルデバイスの多くがタッチ操
作によるものだが,操作時のユーザの手で画面を隠してしまう,手が汚れている時には触りたくないといった場面が想定され,空中でのジェスチャ操作ができればより便利である.しかし,そのためには追加のハードウェアが必要であったり,デバイスに搭載されているセンサを用いたジェスチャ認識では,識別できるジェスチャに制限がある.そこで本研究では,デバイスに搭載されているマイクとスピーカを用いた超音波によるジェスチャ認識手法に着目する.マイク/スピーカ部に取得/発信する音響特性が変化するようなカバーを装着し,従来の超音波による手法 [1]では取得が困難であったジェスチャの識別を可能にする.本手法では,デバイス内蔵のマイクとスピーカを利用し,3Dプリントされたカバーを用いて音響特徴を変化させるため,ジェスチャ識別のために電力を消費する追加のデバイスが必要ない.
2 提案手法提案手法ではスマートフォンでの利用を想定する.スピーカ
から 20kHzの超音波を発信し,マイクでは同時に音声信号を取得する.音声取得のためのサンプリング周波数は 44.1kHz
とした.取得した音声データに高速フーリエ変換 (FFT: Fast
Fourier Transform)を行い,20kHz周囲の周波数スペクトルを抽出する.FFT計算のためのウインドウサイズは 2048とした.図 1に,音源に対し右から手を通過させた場合と,左から手を通過させた場合のピーク周波数周辺の音量の時間変化について示す.青色の線は,ピーク周波数下方の音量を示し,手がマイクから離れる動きをした時に増加する.赤色の線は,ピーク周波数上方の音量であり,手がマイクへと近づく動きをした時に増加する.図 1のカバー無しに示すように,対象が近づく/遠ざかる動きはピーク周波数上方と下方の変化から取得することができるが,左右どちらからのジェスチャでも波形の変化が似ているため,どの方向から近づいているかを識別することは難しい.一方,マイクの一部を遮蔽するようなカバーを装着することで,左右からのマイクへの入力音量に差をつける.図 1カバーありのようにマイク右側を遮蔽し,右から左へと手を動かすと,マイクへと接近するまでのドップラー効果の音量は小さく,マイクを通過した後のドップラー効果の音量は大きく反応するため,先に小さく赤色の線が反応し,次に大きく青色の線が反応すると考えられる.また,逆側からのジェスチャでは大小関係が入れ替わる.これらの音量差を用いてジェスチャ認識を行う.ピーク周波数上方の音量,下方の音量が,一定時間内にしきい値を超えた時のみシステムは判定を行い,これらの大小関係によりジェスチャの方向を識別する.本研究では,予備実験からしきい値を設定し,ピーク周波数上方と下方の反応は,1
秒以内であれば有効とした.なお,デバイスとマイクカバーの構成によって,ジェスチャの向きとこれらの大小関係の対応は変化する.
3 実装と評価実験実装したマイクカバーの 3Dモデルを図 2に示す.マイク
カバーは,マイクの片側を部分遮蔽したもの (図 2a,b),マイクから 2又に別れた管を付け片側をスポンジで部分遮蔽し
SPKMIC SPKMIC
音量
時間
SPKMIC
カバー無し カバーあり
Cover
SPKMIC
Cover
音量
時間
音量
時間
音量
時間
ピーク周波数上方 ピーク周波数下方
図 1: 音量の時間変化の一例
a b c d
マイク部
スピーカ部
図 2: 実装したマイクカバーの 3Dモデル
表 1: 各ジェスチャの認識正解数カバーの種類 a b c右遮蔽 c左遮蔽 d
認識率 [%] 40.0 53.3 66.7 25.0 92.7
たもの (図 2c),マイク/スピーカに同一方向の指向性を持たせたもの (図 2d)をモデリングし,3Dプリンタで出力した.これらのマイクカバーを用いて,評価実験を行った.本研究では,スマートフォンは縦に見る状態で,対象とする操作は左右のスワイプのみとした.机の上にカバーを装着したデバイスを置き,デバイスを中心に,左右 10cm程度の間を,利き手で平行に移動するようなジェスチャを行う.左から右,右から左へのジェスチャを,各カバーにつきそれぞれ 10回ずつ行う.使用したスマートフォンはApple社の iPhone5である.被験者は 24歳から 27歳の男性 3名であり,全員右利きであった.実験結果を表 1に示す.この表に示すように,本研究で用いたカバーの中では,カバー dの認識率がもっとも良い結果となった.カバー dでは,デバイスの右斜め上にマイクとスピーカの指向性を持たせることで,デバイス右側での動作の時に大きな反応が確認され,他のカバーよりも正確に識別できた.
4 まとめ本研究では,既存デバイスのマイク/スピーカ部に取得/
発信する音響特性が変化するようなカバーを装着し,従来の超音波による手法では困難であったジェスチャの識別を可能にする手法を提案した.5種類のプロトタイプカバーを実装し,左右のスワイプの空中ジェスチャを識別したところ,最も効果的なカバーでは,平均 92.7%の精度で認識できた.
参考文献[1] S. Gupta, D. Morris, S. Patel, and D. Tan: Sound-
wave: Using the Doppler Effect to Sense Gestures,
Proceedings of the SIGCHI Conference on Human
Factors in Computing Systems (CHI 2012), pp. 1911–
1914 (2012).
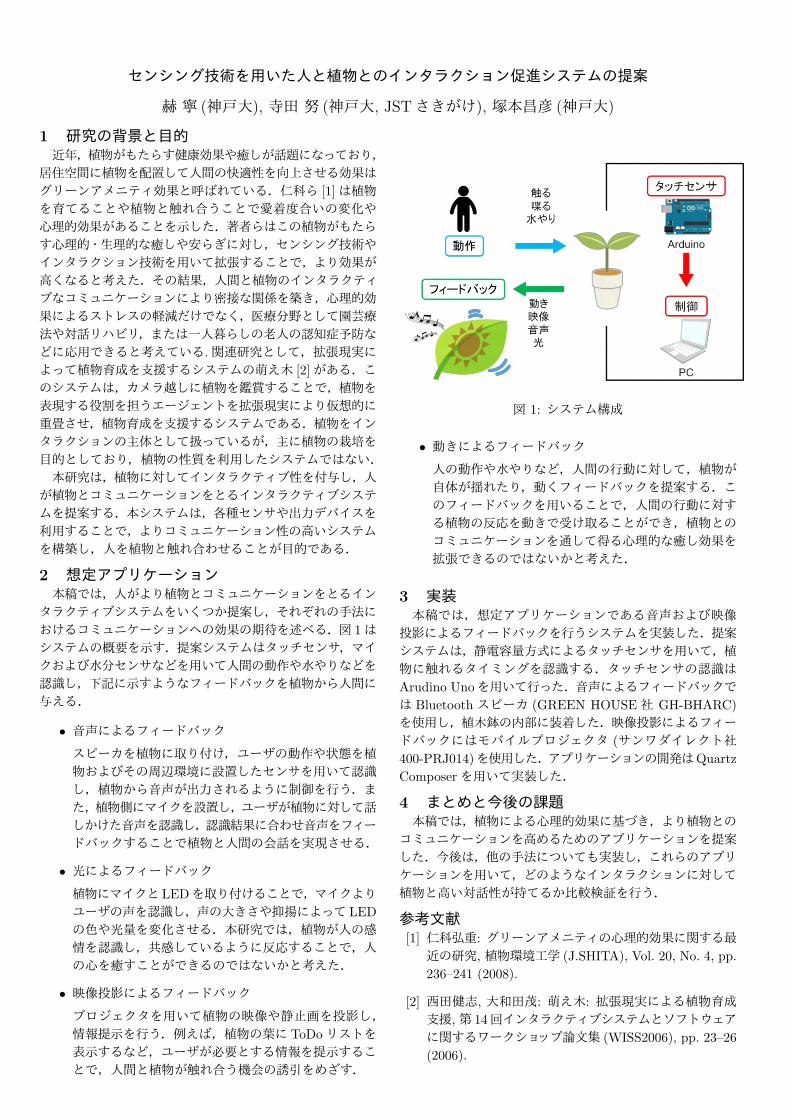
センシング技術を用いた人と植物とのインタラクション促進システムの提案
赫 寧 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年,植物がもたらす健康効果や癒しが話題になっており,
居住空間に植物を配置して人間の快適性を向上させる効果はグリーンアメニティ効果と呼ばれている.仁科ら [1]は植物を育てることや植物と触れ合うことで愛着度合いの変化や心理的効果があることを示した.著者らはこの植物がもたらす心理的・生理的な癒しや安らぎに対し,センシング技術やインタラクション技術を用いて拡張することで,より効果が高くなると考えた.その結果,人間と植物のインタラクティブなコミュニケーションにより密接な関係を築き,心理的効果によるストレスの軽減だけでなく,医療分野として園芸療法や対話リハビリ,または一人暮らしの老人の認知症予防などに応用できると考えている.関連研究として,拡張現実によって植物育成を支援するシステムの萌え木 [2]がある.このシステムは,カメラ越しに植物を鑑賞することで,植物を表現する役割を担うエージェントを拡張現実により仮想的に重畳させ,植物育成を支援するシステムである.植物をインタラクションの主体として扱っているが,主に植物の栽培を目的としており,植物の性質を利用したシステムではない.本研究は,植物に対してインタラクティブ性を付与し,人
が植物とコミュニケーションをとるインタラクティブシステムを提案する.本システムは,各種センサや出力デバイスを利用することで,よりコミュニケーション性の高いシステムを構築し,人を植物と触れ合わせることが目的である.
2 想定アプリケーション本稿では,人がより植物とコミュニケーションをとるイン
タラクティブシステムをいくつか提案し,それぞれの手法におけるコミュニケーションへの効果の期待を述べる.図 1はシステムの概要を示す.提案システムはタッチセンサ,マイクおよび水分センサなどを用いて人間の動作や水やりなどを認識し,下記に示すようなフィードバックを植物から人間に与える.
• 音声によるフィードバック
スピーカを植物に取り付け,ユーザの動作や状態を植物およびその周辺環境に設置したセンサを用いて認識し,植物から音声が出力されるように制御を行う.また,植物側にマイクを設置し,ユーザが植物に対して話しかけた音声を認識し,認識結果に合わせ音声をフィードバックすることで植物と人間の会話を実現させる.
• 光によるフィードバック
植物にマイクとLEDを取り付けることで,マイクよりユーザの声を認識し,声の大きさや抑揚によって LED
の色や光量を変化させる.本研究では,植物が人の感情を認識し,共感しているように反応することで,人の心を癒すことができるのではないかと考えた.
• 映像投影によるフィードバック
プロジェクタを用いて植物の映像や静止画を投影し,情報提示を行う.例えば,植物の葉に ToDoリストを表示するなど,ユーザが必要とする情報を提示することで,人間と植物が触れ合う機会の誘引をめざす.
図 1: システム構成
• 動きによるフィードバック
人の動作や水やりなど,人間の行動に対して,植物が自体が揺れたり,動くフィードバックを提案する.このフィードバックを用いることで,人間の行動に対する植物の反応を動きで受け取ることができ,植物とのコミュニケーションを通して得る心理的な癒し効果を拡張できるのではないかと考えた.
3 実装本稿では,想定アプリケーションである音声および映像投影によるフィードバックを行うシステムを実装した.提案システムは,静電容量方式によるタッチセンサを用いて,植物に触れるタイミングを認識する.タッチセンサの認識はArudino Unoを用いて行った.音声によるフィードバックでは Bluetoothスピーカ (GREEN HOUSE社 GH-BHARC)
を使用し,植木鉢の内部に装着した.映像投影によるフィードバックにはモバイルプロジェクタ (サンワダイレクト社400-PRJ014)を使用した.アプリケーションの開発はQuartz
Composerを用いて実装した.
4 まとめと今後の課題本稿では,植物による心理的効果に基づき,より植物とのコミュニケーションを高めるためのアプリケーションを提案した.今後は,他の手法についても実装し,これらのアプリケーションを用いて,どのようなインタラクションに対して植物と高い対話性が持てるか比較検証を行う.
参考文献[1] 仁科弘重: グリーンアメニティの心理的効果に関する最近の研究, 植物環境工学 (J.SHITA), Vol. 20, No. 4, pp.
236–241 (2008).
[2] 西田健志, 大和田茂: 萌え木: 拡張現実による植物育成支援,第 14回インタラクティブシステムとソフトウェアに関するワークショップ論文集 (WISS2006), pp. 23–26
(2006).

シワを用いたタッチ入力とピンチ入力の評価に向けて
上田健太郎 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年,ウェアラブルコンピューティングの発展に伴い,新
たなインタラクションを用いた操作方法が提案されている.特に,コンピュータやセンサの小型化,LilyPadの登場などにより,衣服にセンサなどを統合したテキスタイルインタフェースがある.テキスタイルインタフェースは,布を折る,揉む,なでるなどの今までのインタフェースにはなかった布特有のインタラクションを入力操作に利用できる.特に,布を触って入力を行うタッチ入力と布をつまんで入力を行うピンチ入力を入力方法に利用しているテキスタイルインタフェースは多くある.筆者らは,シワを用いた入力インタフェース [1]を提案している.このインタフェースでは,タッチ入力を入力方法として利用し,布にシワを生成し,そのシワを触ることで入力操作を行う.しかし,シワの形状はつまみやすく,シワをつまむ行為は自然な行為なので,シワをつまむピンチ入力も入力方法として利用できる.そこで,本研究ではシワを用いたタッチ入力とピンチ入力
の特性を評価する.シワを用いた入力インタフェースを用いて行う入力方法は,複数の選択肢からひとつを選ぶ操作を想定しており,タッチ入力に関しては 3手法,ピンチ入力に関しては 1手法を提案する.
2 システム構成入力方法を実装するためにタッチ入力とピンチ入力を検出
する機構が必要となる.
2.1 タッチ検出機構タッチ検出機構は導電糸と静電容量センサコントローラか
ら構成される.指が導電糸に触れた際に誘起される糸の静電容量の変化を静電容量センサコントローラによって測定し,指が糸に触れているかを認識する.
2.2 ピンチ検出機構ピンチ検出機構は導電糸とマイコンで構成される.2本の
導電糸のうち一方に電圧を加え,もう一方を接地する.布をつまんだ際に 2本の導電糸が接触し,電圧を加えている導電糸の電圧を測定することで布をつまんでいるかを認識する.
3 入力方法シワを用いた入力インタフェースを用いて行う入力は,複
数の選択肢からひとつを選ぶ操作を想定しており,複数のシワから 1本を選び,そのシワをタッチ,またはピンチすることで行う.そのため,タッチ入力に関して,シワの選択とタッチ入力の際にシワを触るため,シワ選択と入力を区別する必要がある.シワの選択と入力のタッチを区別するために,長押し法,絞込み法,ダブルタッチの 3種類の入力方法を実装した.長押し法は,シワの導電糸に約 1秒触れているとタッチ入力と認識する.絞込み法は,すべてのシワに触れ,その後タッチするシワの導電糸に触れるとタッチ入力と認識する.ダブルタッチは,シワの導電糸に 2回すばやく触れるとタッチ入力と認識する.ピンチ入力に関しては,シワの選択時にはシワを触り,入
力時にはシワをつまむので,選択と入力の区別が不要である.ピンチ入力は,シワをつまみ,シワの側面に縫われた導電糸同士が接触するとピンチ入力と認識する.長押し法,ダ
� �
�����
�
�����
�
図 1: 布デバイス
ブルタッチ,ピンチ入力を用いて入力する場合,すべてのシワを 1本ずつ触れてシワの位置を確認し,その後入力するシワを選択し,入力を行う.絞込み法を用いて入力する場合,すべてのシワを同時に触れてすべてのシワの位置を確認し,その後入力するシワを選択し,入力を行う.
4 ハードウェア評価のために,導電布と布を用いて布デバイスを実装し
た.実装したデバイスを図 1に示す.縦 27cm,横 7.5cmの布に 1cm間隔でシワを 5本つくり,シワの頂点部と側面に導電糸を縫い付ける.頂点部の糸は静電容量センサと接続し,側面の糸はマイコンと接続する.タッチの誤検出を防ぐために導電糸と静電容量センサコントローラの接続にはシールド線を用いた.静電容量センサコントローラの制御はピンチ検出に使用しているマイコンで行う.静電容量センサコントローラとしてMPR121搭載静電容量センサコントローラを用い,マイコンとしてArduino nanoを用いた.また,マイコンと PCはXbeeを用いて無線接続されており,マイコンから送られたセンサ情報によって,PCでタッチとピンチの認識を行う.
5 まとめ本研究では,シワを用いたタッチ入力とピンチ入力の評価
のための 4 種類の入力手法の提案とデバイスの実装を行った.今後,このデバイスを用いて,各入力手法の入力精度と速度の習熟,装着位置による入力精度,速度,操作の自然さなどを評価する予定である.
参考文献[1] Kentaro Ueda, Tsutomu Terada, and Masahiko
Tsukamoto: Input Interface Using Wrinkles on
Clothes, Proc of the 20th ACM International Sympo-
sium on Wearable Computers (ISWC 2016 ), pp. 56–
57 (Sep 2016).
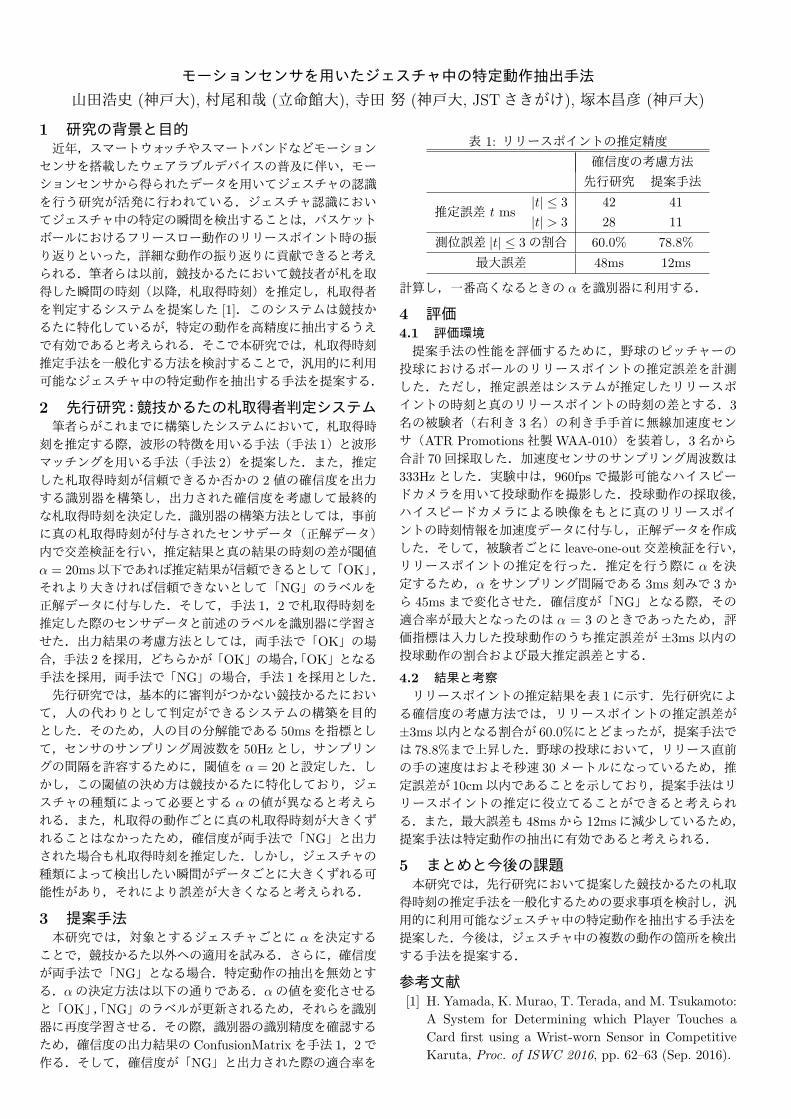
モーションセンサを用いたジェスチャ中の特定動作抽出手法
山田浩史 (神戸大), 村尾和哉 (立命館大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年,スマートウォッチやスマートバンドなどモーション
センサを搭載したウェアラブルデバイスの普及に伴い,モーションセンサから得られたデータを用いてジェスチャの認識を行う研究が活発に行われている.ジェスチャ認識においてジェスチャ中の特定の瞬間を検出することは,バスケットボールにおけるフリースロー動作のリリースポイント時の振り返りといった,詳細な動作の振り返りに貢献できると考えられる.筆者らは以前,競技かるたにおいて競技者が札を取得した瞬間の時刻(以降,札取得時刻)を推定し,札取得者を判定するシステムを提案した [1].このシステムは競技かるたに特化しているが,特定の動作を高精度に抽出するうえで有効であると考えられる.そこで本研究では,札取得時刻推定手法を一般化する方法を検討することで,汎用的に利用可能なジェスチャ中の特定動作を抽出する手法を提案する.
2 先行研究:競技かるたの札取得者判定システム筆者らがこれまでに構築したシステムにおいて,札取得時
刻を推定する際,波形の特徴を用いる手法(手法 1)と波形マッチングを用いる手法(手法 2)を提案した.また,推定した札取得時刻が信頼できるか否かの 2値の確信度を出力する識別器を構築し,出力された確信度を考慮して最終的な札取得時刻を決定した.識別器の構築方法としては,事前に真の札取得時刻が付与されたセンサデータ(正解データ)内で交差検証を行い,推定結果と真の結果の時刻の差が閾値α = 20ms以下であれば推定結果が信頼できるとして「OK」,それより大きければ信頼できないとして「NG」のラベルを正解データに付与した.そして,手法 1,2で札取得時刻を推定した際のセンサデータと前述のラベルを識別器に学習させた.出力結果の考慮方法としては,両手法で「OK」の場合,手法 2を採用,どちらかが「OK」の場合,「OK」となる手法を採用,両手法で「NG」の場合,手法 1を採用とした.先行研究では,基本的に審判がつかない競技かるたにおい
て,人の代わりとして判定ができるシステムの構築を目的とした.そのため,人の目の分解能である 50msを指標として,センサのサンプリング周波数を 50Hzとし,サンプリングの間隔を許容するために,閾値を α = 20と設定した.しかし,この閾値の決め方は競技かるたに特化しており,ジェスチャの種類によって必要とする αの値が異なると考えられる.また,札取得の動作ごとに真の札取得時刻が大きくずれることはなかったため,確信度が両手法で「NG」と出力された場合も札取得時刻を推定した.しかし,ジェスチャの種類によって検出したい瞬間がデータごとに大きくずれる可能性があり,それにより誤差が大きくなると考えられる.
3 提案手法本研究では,対象とするジェスチャごとに αを決定する
ことで,競技かるた以外への適用を試みる.さらに,確信度が両手法で「NG」となる場合.特定動作の抽出を無効とする.αの決定方法は以下の通りである.αの値を変化させると「OK」,「NG」のラベルが更新されるため,それらを識別器に再度学習させる.その際,識別器の識別精度を確認するため,確信度の出力結果の ConfusionMatrixを手法 1,2で作る.そして,確信度が「NG」と出力された際の適合率を
表 1: リリースポイントの推定精度
確信度の考慮方法
先行研究 提案手法
推定誤差 t ms|t| ≤ 3 42 41
|t| > 3 28 11
測位誤差 |t| ≤ 3の割合 60.0% 78.8%
最大誤差 48ms 12ms
計算し,一番高くなるときの αを識別器に利用する.
4 評価4.1 評価環境提案手法の性能を評価するために,野球のピッチャーの
投球におけるボールのリリースポイントの推定誤差を計測した.ただし,推定誤差はシステムが推定したリリースポイントの時刻と真のリリースポイントの時刻の差とする.3
名の被験者(右利き 3名)の利き手手首に無線加速度センサ(ATR Promotions社製WAA-010)を装着し,3名から合計 70回採取した.加速度センサのサンプリング周波数は333Hzとした.実験中は,960fpsで撮影可能なハイスピードカメラを用いて投球動作を撮影した.投球動作の採取後,ハイスピードカメラによる映像をもとに真のリリースポイントの時刻情報を加速度データに付与し,正解データを作成した.そして,被験者ごとに leave-one-out交差検証を行い,リリースポイントの推定を行った.推定を行う際に αを決定するため,αをサンプリング間隔である 3ms刻みで 3から 45msまで変化させた.確信度が「NG」となる際,その適合率が最大となったのは α = 3のときであったため,評価指標は入力した投球動作のうち推定誤差が ±3ms以内の投球動作の割合および最大推定誤差とする.
4.2 結果と考察リリースポイントの推定結果を表 1に示す.先行研究によ
る確信度の考慮方法では,リリースポイントの推定誤差が±3ms以内となる割合が 60.0%にとどまったが,提案手法では 78.8%まで上昇した.野球の投球において,リリース直前の手の速度はおよそ秒速 30メートルになっているため,推定誤差が 10cm以内であることを示しており,提案手法はリリースポイントの推定に役立てることができると考えられる.また,最大誤差も 48msから 12msに減少しているため,提案手法は特定動作の抽出に有効であると考えられる.
5 まとめと今後の課題本研究では,先行研究において提案した競技かるたの札取
得時刻の推定手法を一般化するための要求事項を検討し,汎用的に利用可能なジェスチャ中の特定動作を抽出する手法を提案した.今後は,ジェスチャ中の複数の動作の箇所を検出する手法を提案する.
参考文献[1] H. Yamada, K. Murao, T. Terada, and M. Tsukamoto:
A System for Determining which Player Touches a
Card first using a Wrist-worn Sensor in Competitive
Karuta, Proc. of ISWC 2016, pp. 62–63 (Sep. 2016).

学習フェーズ分離が与える身体運動を伴う学習効果の影響の解明
菅家浩之 (神戸大), 寺田 努 (神戸大, JST さきがけ), 塚本昌彦 (神戸大)
1 はじめにこれまでに,身体運動においてそれぞれの運動に対して適
した正しいリズムが存在するといわれている.例えば,走高跳や幅跳びといった運動においては競技者の能力や目標に適するリズムを習得することが必要とされている.また,楽器演奏においても同様に一定のリズムをキープしながら演奏動作を繰り返すことなどが求められている.正しいリズムを習得するためにこれまで学習者に視覚提示,聴覚提示および触覚提示といった複数の情報提示を利用した学習方法が提案されてきた.研究事例として七澤ら [1]の提案する学習方法では学習者が適切なテンポの音声のフィードバックを受けながら実際に走る動作を行っている.このように,これまでの情報提示を用いた学習方法では身体を実際に動かしながら情報提示を受けることが一般的な手法として考えられてきた.一方で,著者らは身体動作の学習と情報提示を受ける学習
を分離することで学習の効率化が行えるのではないかと考えた.著者らはこれまでに打楽器学習においてそれぞれの学習フェーズを分離することで学習時間を短縮できることを確認している [2].本稿では,さらにどのような身体運動に対して学習フェーズの分離が有用であるか検証するために,リズム提示を用いた学習としてテンポ感覚の習得における評価を行った.
2 提案手法本研究で提案する学習方法は情報提示を受ける学習と身
体動作の学習の 2つの学習フェーズをそれぞれ分離する.図1は打楽器演奏の学習を例とした場合の提案手法を示している.本稿では学習に身体動作に合わせたリズムを視覚,聴覚および触覚による情報刺激を用いて提示する.
3 評価提案手法による有用性を検証するために,本稿では被験者
が提示される一定のテンポ (BPM)のリズム感覚を習得し,同じテンポをできるか検証する.被験者はリズムのクリック音による聴覚提示,メトロノームの表示による視覚提示および触覚提示としてクリック音に同期した振動刺激を指先に受ける.被験者は 5分間の情報提示を受ける.この間従来手法では被験者は手をタップしてリズムを刻むように指示し,提案手法では手や足など身体を動かしてリズムを取ることを禁止した.学習後に自力で提示されたリズムと同じ BPMで手をタップできるか確認テストを行った.確認テストではタップを繰り返し 100回行った.BPMは従来手法では 70および 100に,提案手法では 90および 120に設定した.被験者は大学生および大学院生の 9名である.図 2は従来手法および提案手法の学習におけるBPMとの
ずれとタップした間隔のばらつきの被験者全員の平均値を示している.結果より従来手法の方が,正しいテンポのリズムで提示されたリズムを再現でき,BPMのばらつきが少なかったことからリズムのずれが少なくタップできていたことが分かる.分散分析の結果より,BPMのばらつきにおける適用手法間の主効果 (F(1,17) = 6.08, p<.05)に有意差がみられた.また,実験後のアンケートでは,手をタップする動作は無意識に行っていたというコメントがあり,身体を動かすことが情報提示を受けることへの負担に影響していないこと
図 1: 提案手法
図 2: 実験結果
が分かった.このことから,一定のリズムで手をタップするような単純な身体動作において実際に身体を動かしながら学習する方が有用であると考えられる.
4 おわりに本研究ではリズムの情報提示を用いた身体動作の学習に
おいて,情報提示と身体動作を学習するフェーズを分離する学習方法を提案し,身体動作における提案手法の有用性の検証を行った.評価実験より,打楽器演奏のような複雑な動作とは異なり,単純な身体動作においては実際に身体を動かしながら情報提示を受けることが有用であることが分かった.今後はさらに様々な身体動作における提案手法の効果を検証し,どのような身体運動に対して提案手法が有用となるか検証する予定である.
参考文献[1] 七澤朱音ほか, 運動のリズムを重視した体育学習がもたらす効果に関する研究, 体育科教育研究, Vol. 30, No. 2,
pp. 1–11 (2014).
[2] 菅家浩之ほか, 触覚提示を用いたフレーズ内在化に基づく打楽器学習支援システム,インタラクション 2016, pp.
89–96 (2016).

足圧センサを用いたランニング技術支援システムの実現に向けて
西山 勲 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究背景と目的近年,健康維持やトレーニングの一環としてランニングを
行う人が増加している.トレーニングとしてランニングを行う場合,現状よりも速く,長く走るため,徐々にランニングのピッチをあげたり,ストライドを伸ばすといったことが必要で,これらを無理のない範囲で適切に制御することでランニング技術が向上すると考えられる.しかし長時間のランニングでは,ランナー自らが意識しながらペースを管理するのは難しく,日々のトレーニングで理想とする走行状態を身体に覚えこませる必要がある.適切な走行状態になるよう支援するシステムがあれば,ランナー自らが意識しながらペースを管理する必要がなく,自然と早いペースでのランニングが行えるのではないかと考えられる.Tanjadura-Jimenezらは歩行時の足音を歩行者にフィードバックすることで知覚体重を変化させ,歩行パターンを変化させることに成功している[1].そのため,ランニングにおいても音声フィードバックは有用であると考えられる.また,ランニング技術の支援システムを実現させるにはランニングのペースを適切に制御する必要がある.そこで本研究では,足の踏み込んだタイミングを基準としてフィードバック音の出力のタイミングを変えることで,ランニング時のピッチや速度に影響を与えることができると仮説を立て,ランニング時の足圧データから足の踏込みタイミングを検出し,足の踏み込みタイミングとランニングのテンポから任意の走行状態で音声フィードバックを与えるシステムを提案する.
2 提案システム提案システムでは,medilogic社のリアル足圧分布計測シ
ステムを用いてランニング時の足圧を計測し,足の踏込みのタイミングを検出する.そして,足の踏込みと同時刻,踏込みより遅いタイミング,踏込みより早いタイミングの計 3種類のタイミングで音声を PCから出力する.それらをそれぞれ同時フィードバック,遅延フィードバック,繰上げフィードバックとする.踏み込んだタイミングの検出には図 1に示す踏込み動作の検知しやすい拇指球付近の一点での圧力変化を使用し,閾値を用いて踏込みを判定した.遅延と繰上げ 2
種類のフィードバックについては,ランニングのテンポをあらかじめ記録しておき,記録されたテンポの 3分の 1の時間分,踏込みより遅らせたタイミングおよび早めたタイミングをそれぞれの音声の出力タイミングとする.ここで,ランニングのテンポはランニング時の一方の足の踏込みタイミングからもう一方の足の踏込みタイミングの時間を指し,記録には足圧分布計測システムを用いた.また,リアルタイムで繰上げフィードバックを実現するために,音声の出力タイミングはランニングテンポの 3分の 2の時間分,踏込みより遅らせたタイミングとした.音声については音の高さによる影響を受けない様,ピッチが一定となる sin波の音声を用いた.
3 予備実験3.1 実験内容提案システムにおける 3種類の音声フィードバックと走行
状態の変化を検証するため,それぞれのフィードバック下において,提案システムを用いて 300mの走行実験を行った.被験者は,元陸上部長距離選手の筆者 1名である.足圧分
図 1: 踏込み検出に使用した点
表 1: 各フィードバックにおけるパラメータの比較
同時 遅延 繰上げ
ピッチ [bpm] 171.4 164.3 171.4
速度 [m/s] 1.875 1.796 1.829
足圧値 [N/cm2·s] 1.205 1.195 1.160
布センサを用いて,ランニングのピッチおよび速度を計測した.さらに,踏み込み蹴りだす力を調査するため足圧の平均値の計測を行い,ストライドを判定するための指標とした.ただし,ランニングのテンポを計測するため,被験者はあらかじめ足圧分布センサを装着した状態で約 200m走行した.
3.2 結果と考察各フィードバックを行った際のランニング時のパラメータの変化を表 1に示す.遅延フィードバックを行った際,同時フィードバックに比べ,ピッチが遅くなり速度も遅くなるといった結果が得られた.一方で繰上げフィードバックでは,同時フィードバックに比べ足圧値が下がってしまい,踏み込む力が弱くなってしまった.今回提案したシステムでは,フィードバックのタイミングをずらすことで目標としていた走行スピードを上げる事はできなかった.これは,ランニング中にはその人固有のテンポやリズムをもっていることが多く,音声のタイミングだけでその人本来のリズムを崩すことが難しいためだと考えられる.また今回の実験では,走行距離を 300mとしており,その中で音声フィードバックによる影響を与えるには時間が短かったことも考えられる.
4 今後の課題本研究では,踏込みと同時,遅延,繰上げの 3種類の時刻で音声フィードバックを行い,ランニングへの影響を検証した.今後はフィードバック音の高さや出力時間を変えるなど他のアプローチでの検証を行い,より効果的な音声による走行制御方法を調査する予定である.
参考文献[1] A. Tajadura-Jimenez et al.: As Light as your Foot-
steps: Altering Walking Sounds to Change Perceived
Body Weight, Emotional State and Gait, Proc of the
33rd Annual ACM Conference on Human Factors in
Computing Systems (CHI 2015), pp. 2943–2952 (Apr.
2015).
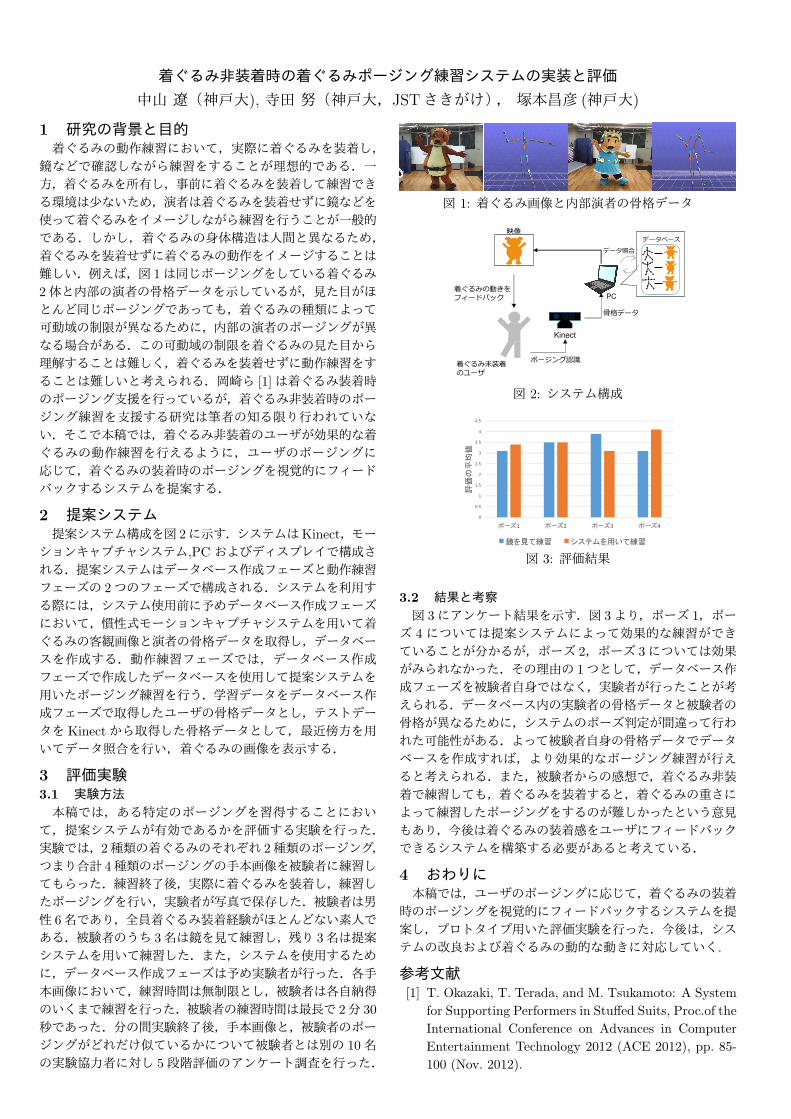
着ぐるみ非装着時の着ぐるみポージング練習システムの実装と評価
中山 遼(神戸大), 寺田 努(神戸大,JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的着ぐるみの動作練習において,実際に着ぐるみを装着し,
鏡などで確認しながら練習をすることが理想的である.一方,着ぐるみを所有し,事前に着ぐるみを装着して練習できる環境は少ないため,演者は着ぐるみを装着せずに鏡などを使って着ぐるみをイメージしながら練習を行うことが一般的である.しかし,着ぐるみの身体構造は人間と異なるため,着ぐるみを装着せずに着ぐるみの動作をイメージすることは難しい.例えば,図 1は同じポージングをしている着ぐるみ2体と内部の演者の骨格データを示しているが,見た目がほとんど同じポージングであっても,着ぐるみの種類によって可動域の制限が異なるために,内部の演者のポージングが異なる場合がある.この可動域の制限を着ぐるみの見た目から理解することは難しく,着ぐるみを装着せずに動作練習をすることは難しいと考えられる.岡崎ら [1]は着ぐるみ装着時のポージング支援を行っているが,着ぐるみ非装着時のポージング練習を支援する研究は筆者の知る限り行われていない.そこで本稿では,着ぐるみ非装着のユーザが効果的な着ぐるみの動作練習を行えるように,ユーザのポージングに応じて,着ぐるみの装着時のポージングを視覚的にフィードバックするシステムを提案する.
2 提案システム提案システム構成を図 2に示す.システムはKinect,モー
ションキャプチャシステム,PC およびディスプレイで構成される.提案システムはデータベース作成フェーズと動作練習フェーズの 2つのフェーズで構成される.システムを利用する際には,システム使用前に予めデータベース作成フェーズにおいて,慣性式モーションキャプチャシステムを用いて着ぐるみの客観画像と演者の骨格データを取得し,データベースを作成する.動作練習フェーズでは,データベース作成フェーズで作成したデータベースを使用して提案システムを用いたポージング練習を行う.学習データをデータベース作成フェーズで取得したユーザの骨格データとし,テストデータを Kinectから取得した骨格データとして,最近傍方を用いてデータ照合を行い,着ぐるみの画像を表示する.
3 評価実験3.1 実験方法本稿では,ある特定のポージングを習得することにおい
て,提案システムが有効であるかを評価する実験を行った.実験では,2種類の着ぐるみのそれぞれ 2種類のポージング,つまり合計 4種類のポージングの手本画像を被験者に練習してもらった.練習終了後,実際に着ぐるみを装着し,練習したポージングを行い,実験者が写真で保存した.被験者は男性 6名であり,全員着ぐるみ装着経験がほとんどない素人である.被験者のうち 3名は鏡を見て練習し,残り 3名は提案システムを用いて練習した.また,システムを使用するために,データベース作成フェーズは予め実験者が行った.各手本画像において,練習時間は無制限とし,被験者は各自納得のいくまで練習を行った.被験者の練習時間は最長で 2分 30
秒であった.分の間実験終了後,手本画像と,被験者のポージングがどれだけ似ているかについて被験者とは別の 10名の実験協力者に対し 5段階評価のアンケート調査を行った.
図 1: 着ぐるみ画像と内部演者の骨格データ
��������
�� ��
Kinect
��
ポージング認識
�����
�����
PC
������
�������
����
図 2: システム構成
�
���
�
���
�
���
�
���
�
���
���� ���� ���� ����
��
��
��
������ ��������
図 3: 評価結果
3.2 結果と考察図 3にアンケート結果を示す.図 3より,ポーズ 1,ポーズ 4については提案システムによって効果的な練習ができていることが分かるが,ポーズ 2,ポーズ 3については効果がみられなかった.その理由の 1つとして,データベース作成フェーズを被験者自身ではなく,実験者が行ったことが考えられる.データベース内の実験者の骨格データと被験者の骨格が異なるために,システムのポーズ判定が間違って行われた可能性がある.よって被験者自身の骨格データでデータベースを作成すれば,より効果的なポージング練習が行えると考えられる.また,被験者からの感想で,着ぐるみ非装着で練習しても,着ぐるみを装着すると,着ぐるみの重さによって練習したポージングをするのが難しかったという意見もあり,今後は着ぐるみの装着感をユーザにフィードバックできるシステムを構築する必要があると考えている.
4 おわりに本稿では,ユーザのポージングに応じて,着ぐるみの装着時のポージングを視覚的にフィードバックするシステムを提案し,プロトタイプ用いた評価実験を行った.今後は,システムの改良および着ぐるみの動的な動きに対応していく.
参考文献[1] T. Okazaki, T. Terada, and M. Tsukamoto: A System
for Supporting Performers in Stuffed Suits, Proc.of the
International Conference on Advances in Computer
Entertainment Technology 2012 (ACE 2012), pp. 85-
100 (Nov. 2012).
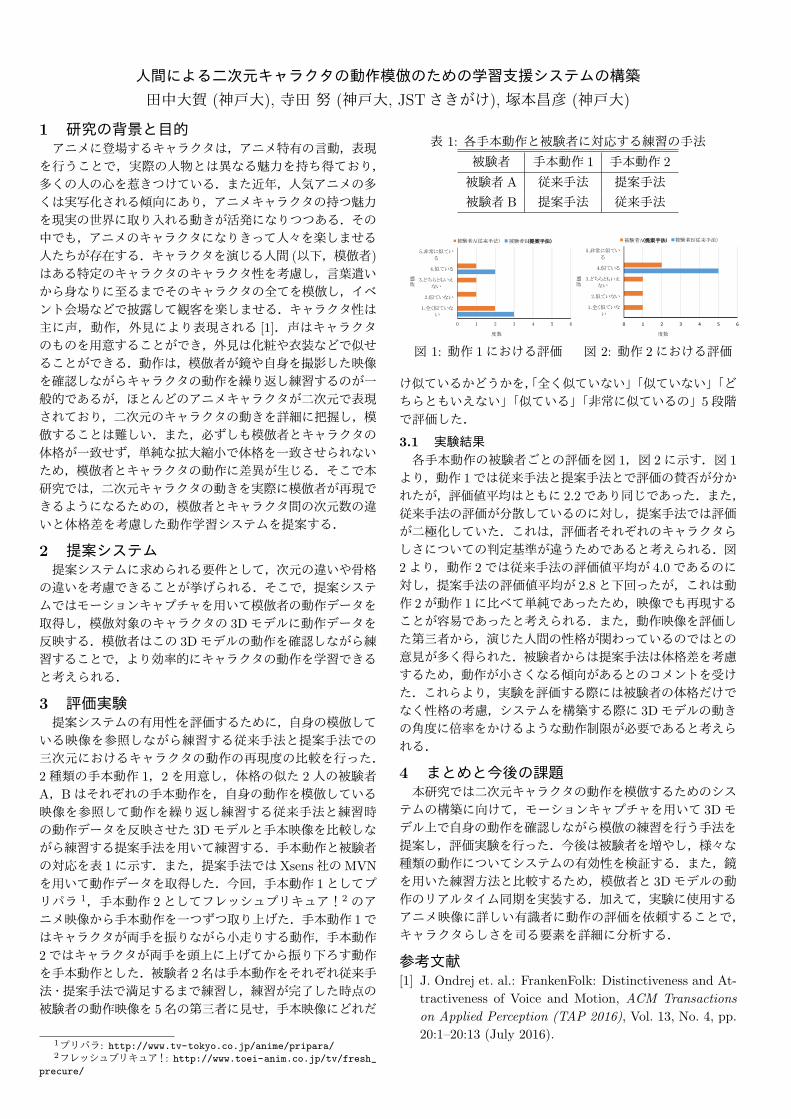
人間による二次元キャラクタの動作模倣のための学習支援システムの構築
田中大賀 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的アニメに登場するキャラクタは,アニメ特有の言動,表現
を行うことで,実際の人物とは異なる魅力を持ち得ており,多くの人の心を惹きつけている.また近年,人気アニメの多くは実写化される傾向にあり,アニメキャラクタの持つ魅力を現実の世界に取り入れる動きが活発になりつつある.その中でも,アニメのキャラクタになりきって人々を楽しませる人たちが存在する.キャラクタを演じる人間 (以下,模倣者)
はある特定のキャラクタのキャラクタ性を考慮し,言葉遣いから身なりに至るまでそのキャラクタの全てを模倣し,イベント会場などで披露して観客を楽しませる.キャラクタ性は主に声,動作,外見により表現される [1].声はキャラクタのものを用意することができ,外見は化粧や衣装などで似せることができる.動作は,模倣者が鏡や自身を撮影した映像を確認しながらキャラクタの動作を繰り返し練習するのが一般的であるが,ほとんどのアニメキャラクタが二次元で表現されており,二次元のキャラクタの動きを詳細に把握し,模倣することは難しい.また,必ずしも模倣者とキャラクタの体格が一致せず,単純な拡大縮小で体格を一致させられないため,模倣者とキャラクタの動作に差異が生じる.そこで本研究では,二次元キャラクタの動きを実際に模倣者が再現できるようになるための,模倣者とキャラクタ間の次元数の違いと体格差を考慮した動作学習システムを提案する.
2 提案システム提案システムに求められる要件として,次元の違いや骨格
の違いを考慮できることが挙げられる.そこで,提案システムではモーションキャプチャを用いて模倣者の動作データを取得し,模倣対象のキャラクタの 3Dモデルに動作データを反映する.模倣者はこの 3Dモデルの動作を確認しながら練習することで,より効率的にキャラクタの動作を学習できると考えられる.
3 評価実験提案システムの有用性を評価するために,自身の模倣して
いる映像を参照しながら練習する従来手法と提案手法での三次元におけるキャラクタの動作の再現度の比較を行った.2種類の手本動作 1,2を用意し,体格の似た 2人の被験者A,Bはそれぞれの手本動作を,自身の動作を模倣している映像を参照して動作を繰り返し練習する従来手法と練習時の動作データを反映させた 3Dモデルと手本映像を比較しながら練習する提案手法を用いて練習する.手本動作と被験者の対応を表 1に示す.また,提案手法ではXsens社のMVN
を用いて動作データを取得した.今回,手本動作 1としてプリパラ 1,手本動作 2としてフレッシュプリキュア!2 のアニメ映像から手本動作を一つずつ取り上げた.手本動作 1ではキャラクタが両手を振りながら小走りする動作,手本動作2ではキャラクタが両手を頭上に上げてから振り下ろす動作を手本動作とした.被験者 2名は手本動作をそれぞれ従来手法・提案手法で満足するまで練習し,練習が完了した時点の被験者の動作映像を 5名の第三者に見せ,手本映像にどれだ
1プリパラ: http://www.tv-tokyo.co.jp/anime/pripara/2フレッシュプリキュア!: http://www.toei-anim.co.jp/tv/fresh_
precure/
表 1: 各手本動作と被験者に対応する練習の手法
被験者 手本動作 1 手本動作 2
被験者 A 従来手法 提案手法
被験者 B 提案手法 従来手法
��
��
� � � � � �
��� ���
�
� ����
��������
��
� ���
���� ��
�
����� !"#$ ���%�&'"#$���%������
図 1: 動作 1における評価
� � � � � � �
��������
�
������
��� ����
��
������
��������
�
��������� ���!�"#��
��
$%
����������
図 2: 動作 2における評価
け似ているかどうかを,「全く似ていない」「似ていない」「どちらともいえない」「似ている」「非常に似ているの」5段階で評価した.
3.1 実験結果各手本動作の被験者ごとの評価を図 1,図 2に示す.図 1
より,動作 1では従来手法と提案手法とで評価の賛否が分かれたが,評価値平均はともに 2.2であり同じであった.また,従来手法の評価が分散しているのに対し,提案手法では評価が二極化していた.これは,評価者それぞれのキャラクタらしさについての判定基準が違うためであると考えられる.図2より,動作 2では従来手法の評価値平均が 4.0であるのに対し,提案手法の評価値平均が 2.8と下回ったが,これは動作 2が動作 1に比べて単純であったため,映像でも再現することが容易であったと考えられる.また,動作映像を評価した第三者から,演じた人間の性格が関わっているのではとの意見が多く得られた.被験者からは提案手法は体格差を考慮するため,動作が小さくなる傾向があるとのコメントを受けた.これらより,実験を評価する際には被験者の体格だけでなく性格の考慮,システムを構築する際に 3Dモデルの動きの角度に倍率をかけるような動作制限が必要であると考えられる.
4 まとめと今後の課題本研究では二次元キャラクタの動作を模倣するためのシステムの構築に向けて,モーションキャプチャを用いて 3Dモデル上で自身の動作を確認しながら模倣の練習を行う手法を提案し,評価実験を行った.今後は被験者を増やし,様々な種類の動作についてシステムの有効性を検証する.また,鏡を用いた練習方法と比較するため,模倣者と 3Dモデルの動作のリアルタイム同期を実装する.加えて,実験に使用するアニメ映像に詳しい有識者に動作の評価を依頼することで,キャラクタらしさを司る要素を詳細に分析する.
参考文献[1] J. Ondrej et. al.: FrankenFolk: Distinctiveness and At-
tractiveness of Voice and Motion, ACM Transactions
on Applied Perception (TAP 2016), Vol. 13, No. 4, pp.
20:1–20:13 (July 2016).
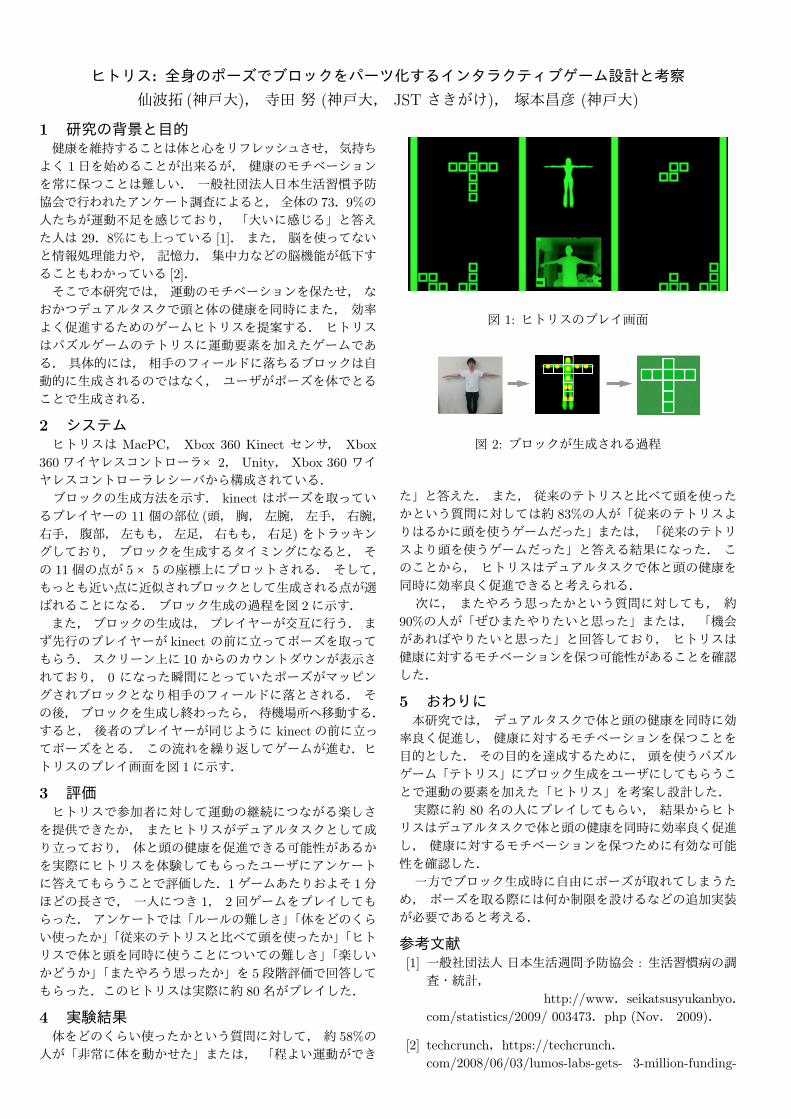
ヒトリス: 全身のポーズでブロックをパーツ化するインタラクティブゲーム設計と考察
仙波拓 (神戸大), 寺田 努 (神戸大, JST さきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的健康を維持することは体と心をリフレッシュさせ,気持ち
よく 1日を始めることが出来るが, 健康のモチベーションを常に保つことは難しい. 一般社団法人日本生活習慣予防協会で行われたアンケート調査によると,全体の 73.9%の人たちが運動不足を感じており, 「大いに感じる」と答えた人は 29.8%にも上っている [1].また,脳を使ってないと情報処理能力や, 記憶力, 集中力などの脳機能が低下することもわかっている [2].そこで本研究では, 運動のモチベーションを保たせ, なおかつデュアルタスクで頭と体の健康を同時にまた, 効率よく促進するためのゲームヒトリスを提案する. ヒトリスはパズルゲームのテトリスに運動要素を加えたゲームである. 具体的には, 相手のフィールドに落ちるブロックは自動的に生成されるのではなく, ユーザがポーズを体でとることで生成される.
2 システムヒトリスは MacPC, Xbox 360 Kinect センサ, Xbox
360ワイヤレスコントローラ× 2, Unity, Xbox 360 ワイヤレスコントローラレシーバから構成されている.ブロックの生成方法を示す. kinect はポーズを取ってい
るプレイヤーの 11 個の部位 (頭,胸,左腕,左手,右腕,右手,腹部,左もも,左足,右もも,右足) をトラッキングしており, ブロックを生成するタイミングになると, その 11個の点が 5 × 5の座標上にプロットされる. そして,もっとも近い点に近似されブロックとして生成される点が選ばれることになる. ブロック生成の過程を図 2に示す.また,ブロックの生成は,プレイヤーが交互に行う.まず先行のプレイヤーが kinect の前に立ってポーズを取ってもらう.スクリーン上に 10 からのカウントダウンが表示されており, 0 になった瞬間にとっていたポーズがマッピングされブロックとなり相手のフィールドに落とされる. その後,ブロックを生成し終わったら,待機場所へ移動する.すると, 後者のプレイヤーが同じように kinectの前に立ってポーズをとる. この流れを繰り返してゲームが進む.ヒトリスのプレイ画面を図 1に示す.
3 評価ヒトリスで参加者に対して運動の継続につながる楽しさを提供できたか, またヒトリスがデュアルタスクとして成り立っており, 体と頭の健康を促進できる可能性があるかを実際にヒトリスを体験してもらったユーザにアンケートに答えてもらうことで評価した.1ゲームあたりおよそ 1分ほどの長さで, 一人につき 1, 2回ゲームをプレイしてもらった.アンケートでは「ルールの難しさ」「体をどのくらい使ったか」「従来のテトリスと比べて頭を使ったか」「ヒトリスで体と頭を同時に使うことについての難しさ」「楽しいかどうか」「またやろう思ったか」を 5段階評価で回答してもらった.このヒトリスは実際に約 80名がプレイした.
4 実験結果体をどのくらい使ったかという質問に対して, 約 58%の人が「非常に体を動かせた」または, 「程よい運動ができ
図 1: ヒトリスのプレイ画面
図 2: ブロックが生成される過程
た」と答えた. また, 従来のテトリスと比べて頭を使ったかという質問に対しては約 83%の人が「従来のテトリスよりはるかに頭を使うゲームだった」または,「従来のテトリスより頭を使うゲームだった」と答える結果になった. このことから, ヒトリスはデュアルタスクで体と頭の健康を同時に効率良く促進できると考えられる.次に, またやろう思ったかという質問に対しても, 約
90%の人が「ぜひまたやりたいと思った」または, 「機会があればやりたいと思った」と回答しており, ヒトリスは健康に対するモチベーションを保つ可能性があることを確認した.
5 おわりに本研究では, デュアルタスクで体と頭の健康を同時に効率良く促進し, 健康に対するモチベーションを保つことを目的とした. その目的を達成するために, 頭を使うパズルゲーム「テトリス」にブロック生成をユーザにしてもらうことで運動の要素を加えた「ヒトリス」を考案し設計した.実際に約 80 名の人にプレイしてもらい, 結果からヒト
リスはデュアルタスクで体と頭の健康を同時に効率良く促進し, 健康に対するモチベーションを保つために有効な可能性を確認した.一方でブロック生成時に自由にポーズが取れてしまうた
め, ポーズを取る際には何か制限を設けるなどの追加実装が必要であると考える.
参考文献[1] 一般社団法人 日本生活週間予防協会 : 生活習慣病の調査・統計,
http://www.seikatsusyukanbyo.com/statistics/2009/ 003473.php (Nov. 2009).
[2] techcrunch,https://techcrunch.com/2008/06/03/lumos-labs-gets- 3-million-funding-

for-brain-games/ (June. 2008).
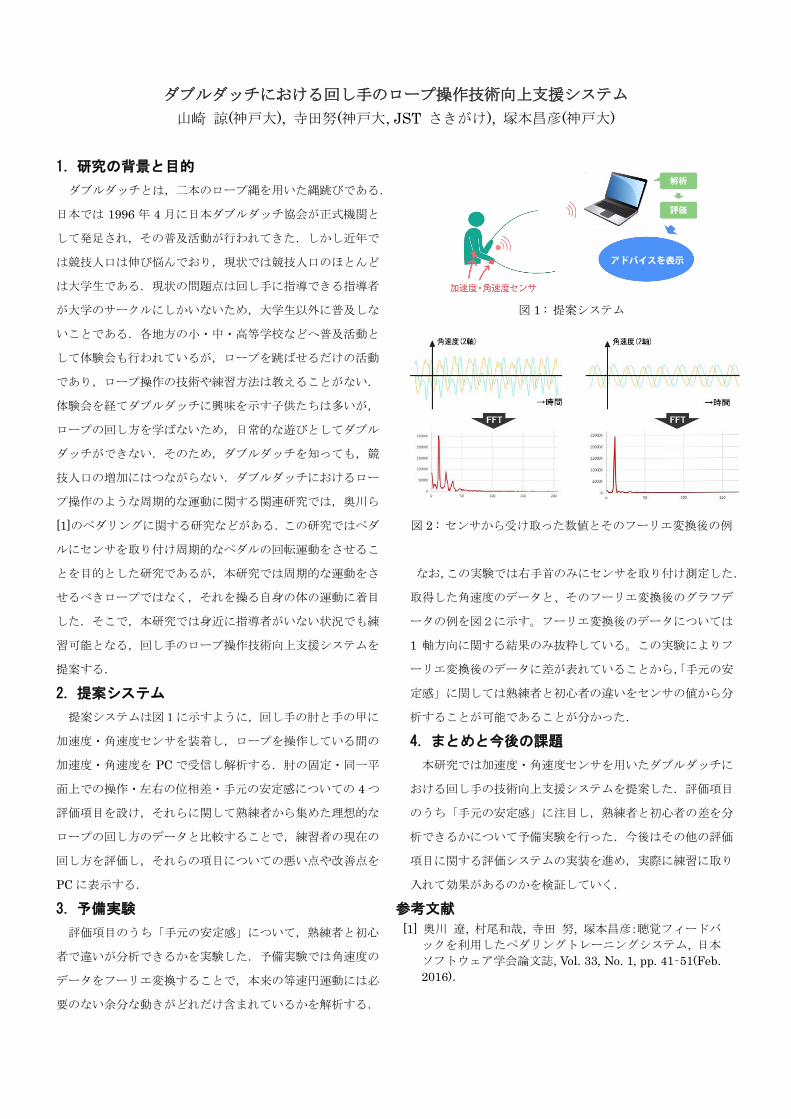
ダブルダッチにおける回し手のロープ操作技術向上支援システム
山崎 諒(神戸大), 寺田努(神戸大, JST さきがけ), 塚本昌彦(神戸大)
1. 研究の背景と目的
ダブルダッチとは,二本のロープ縄を用いた縄跳びである.
日本では 1996 年 4 月に日本ダブルダッチ協会が正式機関と
して発足され,その普及活動が行われてきた.しかし近年で
は競技人口は伸び悩んでおり,現状では競技人口のほとんど
は大学生である.現状の問題点は回し手に指導できる指導者
が大学のサークルにしかいないため,大学生以外に普及しな
いことである.各地方の小・中・高等学校などへ普及活動と
して体験会も行われているが,ロープを跳ばせるだけの活動
であり,ロープ操作の技術や練習方法は教えることがない.
体験会を経てダブルダッチに興味を示す子供たちは多いが,
ロープの回し方を学ばないため,日常的な遊びとしてダブル
ダッチができない.そのため,ダブルダッチを知っても,競
技人口の増加にはつながらない.ダブルダッチにおけるロー
プ操作のような周期的な運動に関する関連研究では,奥川ら
[1]のペダリングに関する研究などがある.この研究ではペダ
ルにセンサを取り付け周期的なペダルの回転運動をさせるこ
とを目的とした研究であるが,本研究では周期的な運動をさ
せるべきロープではなく,それを操る自身の体の運動に着目
した.そこで,本研究では身近に指導者がいない状況でも練
習可能となる,回し手のロープ操作技術向上支援システムを
提案する.
2. 提案システム
提案システムは図1に示すように,回し手の肘と手の甲に
加速度・角速度センサを装着し,ロープを操作している間の
加速度・角速度を PC で受信し解析する.肘の固定・同一平
面上での操作・左右の位相差・手元の安定感についての 4つ
評価項目を設け,それらに関して熟練者から集めた理想的な
ロープの回し方のデータと比較することで,練習者の現在の
回し方を評価し,それらの項目についての悪い点や改善点を
PCに表示する.
3. 予備実験
評価項目のうち「手元の安定感」について,熟練者と初心
者で違いが分析できるかを実験した.予備実験では角速度の
データをフーリエ変換することで,本来の等速円運動には必
要のない余分な動きがどれだけ含まれているかを解析する.
図 1 : 提案システム
図 2 : センサから受け取った数値とそのフーリエ変換後の例
なお,この実験では右手首のみにセンサを取り付け測定した.
取得した角速度のデータと、そのフーリエ変換後のグラフデ
ータの例を図2に示す。フーリエ変換後のデータについては
1 軸方向に関する結果のみ抜粋している。この実験によりフ
ーリエ変換後のデータに差が表れていることから,「手元の安
定感」に関しては熟練者と初心者の違いをセンサの値から分
析することが可能であることが分かった.
4. まとめと今後の課題
本研究では加速度・角速度センサを用いたダブルダッチに
おける回し手の技術向上支援システムを提案した.評価項目
のうち「手元の安定感」に注目し,熟練者と初心者の差を分
析できるかについて予備実験を行った.今後はその他の評価
項目に関する評価システムの実装を進め,実際に練習に取り
入れて効果があるのかを検証していく.
参考文献
[1] 奥川 遼, 村尾和哉, 寺田 努, 塚本昌彦:聴覚フィードバ
ックを利用したペダリングトレーニングシステム, 日本
ソフトウェア学会論文誌, Vol. 33, No. 1, pp. 41–51(Feb.
2016).

観客への印象に基づいた身体性の拡張に向けて
土田修平 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年,人と移動ロボットを組み合わせた身体パフォーマン
スが多く見られる.壇上にてパフォーマと共に移動するロボット [1],踊ることができるヒューマノイドロボット,人の動作に合わせて移動する飛行型のロボットなど,様々な移動ロボットが用いられている.人より大きな箱が,動作に合わせて移動する演出,演者の動作に合わせてロボットアームを用いてオブジェクトを移動させる演出,ワイヤを用いて,演者の動作に合わせてオブジェクトを移動させる演出など,物体を移動させる演出は,多くのパフォーマンスで利用されている.しかし,これら複数の移動ロボットを組み合わせたパフォーマンスは,筆者らの知る限り,振り付け家や演出家の意図のみで作成されており,それらパフォーマンスが観客にどのような印象を与えるかは明らかではなかった.舞踊学において,Bartenieff[2]らのラバン理論など,人の心理状態を表現するための理論は確立されているが,人の身体動作に複数の移動ロボットの要素が加えられた際には,これら理論の適用は困難と考えられる.本研究の目標は,複数の移動ロボットを組み合わせたパ
フォーマンスが観客に与える印象を解明し定式化することである.観客への印象を定式化することで,パフォーマンス作成者は,観客への印象に基づいた動作設計が可能となり,新たな振り付け作成手法を確立できると考えられる.本論文では,人と移動ロボットの単純な動作をそれぞれ列挙し,それら動作の組み合わせからなるパフォーマンスが,観客にどのような印象を与えるかをアンケート評価を用いて調査した.これにより,移動ロボットによってパフォーマの身体性を拡張し,演出を強化できる要素を抽出できると考えられる.
2 実験方法2.1 アンケート項目複数の移動ロボットを組み合わせた身体パフォーマンスが
観客に与える印象を明らかにするために,実験を行った.調査するアンケート項目については,移動ロボットを用いたパフォーマンスを作成者の要望に基づいて作成した.予備実験の結果を基に,以下の質問項目を作成した.Q1: 空間が広がっているように見えたか?Q2: ダイナミックに見えたか?Q3: ロボットの動作はダンサーの動作に似ていたか?Q4: 整然としていたか?Q5: ダンサーの動作に注目したか?Q6: ロボットの動作とダンサーの動作のタイミングは合っ
ていたか?Q7: ロボットの動作はダンサーの動作と連動しているよ
うに見えたか?動画初めの 3秒間の動作を基準として,動作後の印象を 5
段階で評価してもらった.また,それぞれの質問項目における仮説を以下のように設
定した.仮説Q1: ダンサーを中心として,外に広がる動作であれ
ば,空間が広がっているように見える.仮説Q2: 動作の速度が速ければ,ダイナミックに見える.
仮説Q3: 動作のベクトルがそれぞれ同じ方向を向いていれば,それぞれの動作は似ていると捉えられる.仮説Q4: フォーメーションが一定であれば,整然として
いるように捉えられる.仮説Q5: ダンサーとロボットの動作に時間的なずれがあ
れば,ダンサーへの注目が外れる.仮説Q6: ダンサーとロボットの動作に時間的なずれがな
ければ,タイミングは合っていると捉えられる.仮説Q7: ロボットの速度が遅ければ,連動しているよう
には見えない.
2.2 提示する動作仮説をもとに,提示する移動ロボットの動作とダンサーの
動作をそれぞれ以下のように設定した.ダンサーの動作: 手を広げる,手を狭める,画面左へ移動.移動ロボットの動作 広がる,狭まる,画面左へ移動,画
面右へ移動.また,移動ロボットの動作に関して,速度と動作開始時間
のずれのパターンを以下の通り用意した.速度: 1.2m/s,0.6m/s.動作開始時間のずれ: なし,0.5sec遅れて動作開始,0.5sec
早く動作開始.これらを組み合わせた全 72パターンの動作を被験者に評
価してもらった.パフォーマンスの長さは 5秒程度で,初めの 3秒間,ダンサーのみが単調な動作を行っている.提示する動画の撮影は,キャノン社のデジタルカメラ (EOS Kiss
X8i)を用いて行った.撮影範囲は 4m×6mで,パフォーマの身体全体とすべてのロボットが収まるようにして録画した.
3 おわりに本論文では,人と移動ロボットの単純な動作をそれぞれ列
挙し,それら動作の組み合わせからなるパフォーマンスが,観客にどのような印象を与えるかをアンケート評価を用いて調査した.ダンサーの動作 3つ,移動ロボットの動作 4つ,移動ロボットの速度 2つ,動作開始時間のずれ 3つのすべての組み合わせである 72パターンについて,被験者 20名を対象に調査した.予備調査を基に作成したアンケート項目毎に,仮説を設定し,検証した.その結果,8つの仮説の内,5つの仮説が成り立っていることを確認した.今後は前後の状況や人の動作との速度差といった要素を追加し,より詳細な調査を進めていく必要がある.また,今回は音楽と動作の関係は排除しているが,音楽と移動ロボットの動作の組み合わせによっては,異なる印象を与える可能性があるため,今後調査していく必要がある.さらに,これら調査結果を踏まえて,観客の印象に基づいたパフォーマの身体性の拡張に向けて,拡張設計指針の確立を目指す.
参考文献[1] E. Jessop, P. A. Torpey and B. Bloomberg: Music and
Technology in Death and the Powers, Proc. of the In-
ternational Conference on New Interfaces for Musical
Expression (NIME ’11), pp. 349–354 (May 2011).
[2] I. Bartenieff, D. Lewis: Body Movement: Coping
with the environment, Gordon and Breach Publishers
(1980).

ユーザと他者へ光の明滅による個別情報提示可能なメガネ型デバイスでのセンサ情報の活用
三木隆裕(神戸大), 寺田 努(神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的近年,コンピュータの小型化・高性能化に伴い,コンピュー
タを常時身につけることができるウェアラブルデバイスが注目を集めている.ウェアラブルデバイスによる情報提示の対象者は,デバイスの装着者 (以下,ユーザとする)およびユーザを見る他者の両者が考えられる.三澤ら [1]は,ユーザや他者に別々に情報を提示するシステムとして ChameleonMask
を提案している.このシステムは,テレプレゼンスを目的としていて,ユーザおよび他者に映像による情報を提示した.この研究では,第三者が別の環境から遠隔操作によって,ユーザや他者に情報を提示する.しかし、ユーザと他者は同じ環境下で,ユーザ自身にユーザが望む情報を提示し,他者にユーザの意図やセンサから得たユーザ自身の情報を提示することが望まれる.したがって,ユーザと他者に別々に情報を提示することにより,ユーザは通知などを受け取りながら他者と意思疎通が取れる.そこで筆者らは,ユーザと他者に光の明滅によって別々に
情報提示ができるメガネ型デバイスを実装した [2].本稿では,筆者らが提案する表 1に示すアプリケーション例から 4
つの状況下で,提案デバイスの有用性について調査した.
2 実験本実験では,あっち向いてホイ,プレゼンテーション,楽
器演奏,タイピング操作の 4つの状況下で提案デバイス (図1)を被験者に使用してもらい,実験後にアンケートを行い,その結果から筆者がデバイスの有用性について議論を行った.
2.1 実験内容あっち向いてホイでは,ユーザに対して光の提示を行った.被験者はデバイスを装着し,実験協力者を相手にあっち向いてホイを行った.じゃんけんの結果がわかったタイミングで,被験者に上下左右がわかるような LEDの明滅パターンを提示した.プレゼンテーションでは,ユーザと他者の両者に対して光
の提示を行った.ユーザは発表者としてデバイスを装着し,他者は聴講者としてユーザのプレゼンテーションを聴いた.発表者には,発表のテンポ,下を向いていることの通知およびタイマーを提示し,聴講者には,発表における注目箇所の通知,ユーザの緊張状態およびタイマーを LEDの明滅パターンを制御して提示した.楽器演奏では,ユーザに対して光の提示を行った.被験者はメトロノームのテンポに合わせたドラム演奏と提案デバイスによるテンポに合わせたドラム演奏を行った.提案デバイスによるテンポ提示は,BPMに合わせて LEDを明滅させた.タイピング操作では,ユーザに対して光の提示を行った.被験者はデバイスを装着して PCに表示される 2から 10文字の単語を 100単語入力した.タイピング中,デバイスのセンサから得たデータから姿勢が悪い時,LEDの明滅によって注意を行った.
2.2 結果と考察実験後行ったアンケートよりあっち向いてホイでは,被験者は LEDの光が見えなかったと回答した.これは,メガネのフレームが大きく,被験者の視野外で LEDが明滅したた
����������
��
� ������ ������� �
�������� !�"�� ��
図 1: 提案デバイス
表 1: アプリケーション例状況
機能ユーザ 他者
作業中 メールの受信 時報時間管理 タイマー タイマータイピング 姿勢状態 集中度睡眠 眠気防止 睡眠状態買い物中 クーポン 店の案内印象 他者のイメージを制御 ユーザのイメージを制御移動中 ナビゲーション 交通情報
歩きスマホ ユーザへの注意 他者への注意喚起ゲーム ヒットポイント 仲間との合図
ランニング 時間と距離 ユーザの疲労度楽器演奏 テンポ バンド仲間との合図
めと考えられる.プレゼンテーションでは,発表者は発表に集中していて光をあまり認識しなかったと回答した.これはLEDの光量が弱すぎたためだと考えられる.聴講者は,注目箇所への通知およびタイマーは機能として使いたいという回答があった.また,光が気になって発表に集中できなかったという回答もあった.これは突然光りだすことが原因だと考えられる.楽器演奏では,被験者の半分以上が提案デバイスによるテンポ提示での演奏がしやすかったと回答した.音が混在すると音によるテンポ提示は聞き取りにくくなるが,視覚でテンポを取られることは直観的で合わせやすいと考えられる.タイピング操作においては,被験者は通知から自身が姿勢が悪くなっていることを認識しなかった.今回,加速度の値から筆者が主観的に通知を行ったためと考えられる.
3 まとめと今後の課題本研究では,ユーザと他者へ光の明滅により別々の情報提示可能なメガネ型デバイスの評価を,あっち向いてホイ,プレゼンテーション,楽器演奏,タイピング操作の 4つの状況下で行った.実験結果より,どの状況下でも提案した機能だけで使用することは難しいことがわかった.今後の課題として,実験で挙がったデバイスの装着性などの問題点を改善することや他の状況下でも,提案デバイスを用いて提案した機能の有用性について調査する必要がある.
参考文献[1] K. Misawa and J. Rekimoto: ChameleonMask: Em-
bodied Physical and Social Telepresence using Human
Surrogates, Proc. of the 33rd Annual ACM Conference
Extended Abstracts on Human Factors in Computing
Systems (CHI EA 2015), pp. 401–411 (2015).
[2] 三木隆裕, 寺田 努, 塚本昌彦: ユーザと他者へ光の明滅による情報提示可能なメガネ型デバイスの設計と実装,
エンタテインメントコンピューティングシンポジウム2016 論文集, pp. 223–231 (2016).

ウェアラブルデバイスの情報提示がユーザーの主観時間に与える影響の評価清水友順(神戸大),双見京介(神戸大),寺田 努(神戸大,JSTさきがけ),塚本昌彦(神戸大)
1 研究の背景と目的楽しい時間は短く感じ,退屈な時間は長く感じるように,
当事者にとって望ましい主観時間の経過と実際の時間の経過の違いは,精神的な満足度を損なわせる.一方で,知覚刺激によって主観時間が変わることが心理物理学では明らかにされている.例えば,動きの速い映像を見ていると経過時間を長く感じるといったように,刺激の量や回数を大きくすると主観時間が長くなる充実時程錯覚 [1]という現象があるが,この現象を利用すると,ウェアラブルデバイスによって常に知覚刺激を提示しておくことで,ユーザにとって望ましい主観時間に制御できると考えられる.そこで本研究では,頭部装着型ディスプレイ (HMD: Head Mounted Display)を装着したユーザに,主観時間制御を目的とした知覚刺激を提示して,主観時間を制御できるか評価した.
2 提案手法図 1のように,光学シースルー型 HMDの画面上に移動
するオブジェクトを提示する.光学シースルー型は透過するディスプレイ越しに実世界を見ることができるので,実生活での利用に向いている.移動オブジェクトはユーザの周辺視野に提示し,視界をできるだけ妨げないようにする.この移動オブジェクトは充実時程錯覚を引き起こすことを目的としており,移動速度が速いほど主観時間が長くなると考えられる.
3 時間評価実験本稿では,HMDに図 1の刺激を提示したとき,被験者が
秒数えすることなしに見積もる主観的な時間 (時間評価)を測定した.被験者は 21歳から 23歳までの 7名 (男性 5名,
女性 2名)である.実験は時計等で時間を知ることができない環境で行った.HMDは EPSON社の BT-200を用いた.3.1 実験手順1 試行の実験手順としては,最初に時間感覚を較正する
パート,次に時間評価を測定するパートを行う.較正パートでは,後の測定パートでの時間感覚の基準を作るため,被験者に 2分間行うと伝えた上でその時間経過を経験させる.測定パートでは,実験開始後,1分から 9分毎のランダムに合図音を鳴らし,被験者は測定パート開始から何分経過したと感じたか紙に記録する.これを繰り返し行って総試行時間が20分を超えたらランダムな時間で実験を終了する.すべてランダムに行っているのは,定期的に合図音を鳴らすと被験者がそれを手がかりに時間を推測できてしまうためである.ただし,データを被験者間で比較するために,10分経過時点と 20分経過時点では必ず合図音を鳴らし,時間評価を記録させた.また,被験者には試行中に点を番号順に結んで 1
枚の絵を完成させる「点つなぎ」というタスクを課した.点つなぎは各試行ごとに別の用紙を用いたが,点数は 1000点に統一した.実験全体としては,1人の被験者に対して,両パートともに視覚刺激を提示しないパターン (N実験),測定パートのみ刺激を提示するパターン (M実験),較正パートのみ刺激を提示するパターン (C実験)の 3種類の試行を行った.これらの試行はランダムな順序で行った.この試行パターンは,時間評価がM実験は N実験よりも長く,C実験は N実験よりも短くなることを狙った.
���������� ���
図 1: 提示刺激の視界イメージ 図 2: M実験の結果表 1: 10分と 20経過時点の時間評価 [min]
10分経過時点 20分経過時点被験者 N M C N M C
A 6 8 8 13 17 15
B 16 10 11 30 20 21
C 7 11 12 14 16 19
D 23 17 23 48 30 51
E 5.8 7.5 7.5 11.5 12 12
F 11 7.5 13 20 13 23
G 7 7 8 14 13 20
3.2 実験結果と考察10分時点と 20分時点の時間評価を表 1に示す.異なる被験者から得られる 10分時点と 20分時点の時間評価を標本として,試行パターン間で分散分析およびBonferoni法による多重比較検定を行った結果,M実験よりも C実験が時間は有意に長く評価された (F (2, 26) = 3.70, p < .05).よって,主観時間を短くするときは制御対象の時間内のみ刺激を提示し,主観時間を長くするときは前もって刺激を提示しておき制御対象の時間内で刺激を無くすことで主観時間制御が行えると考えられる.この結果は仮説と逆の傾向であるが,Droit-Volet[1]は 2秒から 8秒の時間評価実験で試行時間が長くなるにつれて充実時程錯覚の効果が逆転することを報告し,その原因を経過時間の評価に必要な記憶や認知メカニズムが短い時間と長い時間で異なるためとしている.今回の実験においては 1分以上の時間について評価を行っており,長い時間における認知メカニズムからM実験より C実験が長く評価されたと考えられる.よって,提案手法は 8秒より短い時間においては今回と同じ結果が得られない可能性がある.また,全実験,全被験者の時間評価が線形に推移しており,時間評価は時間経過によらない一貫した傾向があることを単回帰分析を用いて確認した.その一例をM実験の全被験者から得られた全時間評価をプロットしたグラフとして図 2に示す.最小二乗法で求めた線形近似直線の決定係数は全被験者,全試行の中で最低の場合でも 0.95以上であった.よって,提案手法は 20分以上の時間においても線形に時間評価が推移し,同様の効果が得られると考えられる.4 おわりにウェアラブルデバイスによる主観時間制御手法を提案し,時間評価実験でその影響を測定した結果,主観時間制御の実現可能性を示した.今後,被験者のパーソナリティ等の調査から,被験者間の時間感覚の特性の違いを明らかにする.参考文献[1] Sylvie Droit-Volet: A Further Investigation of the
Filled-Duration Illusion With a Comparison Between
Children and Adults, Journal of Experimental Psy-
chology: Animal Behavior Processes, Vol. 34, No. 3,
pp. 400–414 (July 2008)

ビデオシースルーHMDを用いた視覚効果提示による歩行誘導手法
廣本皓大(神戸大), 寺田 努(神戸大, JSTさきがけ), 塚本昌彦(神戸大)
1 研究の背景と目的日常生活において,地図や標識,音声による指示といった
情報を利用した誘導手法が一般に用いられていている.例えば,駅のホームにおいては,ホームの番号や歩行帯を示す標識,音声による案内などが用いられている.このような情報を用いた誘導手法では,ユーザは提示された情報を理解し,それに応じた行動を選択する必要がある.そのため,ユーザの置かれている状況によっては情報を発見できなかったり,情報を正確に理解できないことがあり,正しく誘導されないことがある.そこで,感覚刺激を利用した意識下における誘導手法が提案されている.このような手法では,刺激によりユーザの行動を直接変化させるため,ユーザの自発的な行動を必要とせず,上記の問題を解決できるが,現在提案されている手法では,十分な誘導ができなかったり,特殊なデバイスが必要であるといった課題を残している.本研究では,視覚と他の感覚との関係に着目し,頭部装着型ディスプレイ(HMD: Head Mounted Display) を用いたユーザの自発的な行動を必要としない歩行誘導手法を提案する.提案手法では,HMD のみを用いて歩行誘導を行うことができ,様々な情報提示と組み合わせた歩行誘導が可能となる.
2 提案手法提案手法では,ビデオシースルー型HMD上に図 1のよう
な通常の視界と方位角の異なる映像を提示する.歩行動作には視覚と平衡感覚を司る前庭覚による情報が主に用いられ,視覚と皮膚感覚や位置覚などの体性感覚との間に矛盾が生じているとき,身体を制御する上で体性感覚より視覚のほうが優勢であるとされている.そのため,体性感覚と矛盾した視覚情報を提示することにより,映像を提示されたユーザは進行方向を錯覚し,それを補正する方向に進行方向が変化すると考えられる.提案システムはHMD,Web カメラ,サーボモータ,マイコン,PC で構成される.ユーザはHMD を装着し,HMDにはWeb カメラで取得した映像をユーザの視界全体に提示する.Web カメラはサーボモータに固定し,モータは水平方向に回転できるようにHMDに装着する.歩行誘導時にはサーボモータを回転させ,ユーザの進行方向から回転した状態のカメラ映像をユーザに提示する.
3 評価実験歩行中にユーザに方位角を変化させた映像を提示し,ユーザの進行方向を変化させることが可能か調査した.20 代の男性 5 名の被験者にプロトタイプを装着し,PC を収納したリュックを背負わせ実験を行った.実験は室内で行い,スタート地点を設定する.スタート地点から 5m 直進した点をゴール地点とし,ゴール地点から進行方向に対して垂直なラインをゴールラインとした.歩行誘導を行う前に,被験者にはビデオシースルー型HMDの映像を見て歩行することに慣れるため,カメラの向きを正面に固定した状態で,数分間歩行練習を行わせた.練習後,被験者にスタート地点からゴール地点に向かって歩行して直進するように指示し,スタート地点から 2m 進んだラインを超えた地点でカメラを回転させて,HMD 上の映像が通常の視界と方位角が異なる状態で残りの 3m を歩行させた.被験者には実験前に,歩行中にカメラが回転することを伝えている.カメラの回転は,顔の正面
����
����
�� ��
����
��
図 1: ユーザに提示する映像
���
���
���
���
��
�
�
��
��
��
��
� � � � �
��
��
��
��
��
ഈ؉
��
��� ��
� � � � �
図 2: 実験結果
を基準に,時計回りを正として角度を 2度/sec で± 10度回転させ,それぞれ 5 回ずつ歩行させた.実験結果を図 2 に示す.縦軸は到着点の距離の平均値を示し,凡例にカメラの回転角度を示す.エラーバーは標準誤差を示す.被験者 A の回転角度 10 度の場合や被験者 B の回転角度-10 度の場合では,映像の回転方向と同方向に進行方向がずれた.また,実験後に被験者に質問したところ,全ての被験者が映像の回転に気付かなかったと回答したことから,本手法がユーザに知覚されない誘導手法として用いることができる可能性を示唆した.
4 歩行誘導手法アプリケーションの方向性評価実験の結果より,ビデオシースルー型 HMD を装着し,水平方向に回転させたカメラ映像を提示することで,無意識に歩行者を誘導できる可能性が示された.この誘導手法では,人の注意力を必要としないナビゲーションなどの利用が考えられる.無意識に混雑時の通路での片側通行を促すアプリケーションや,周囲への注意力が不足していて危険な場所に近づくことを回避させるアプリケーションとしての利用が考えられる.また,ビデオシースルー型HMDを使用する際に装着のずれなどにより,意図せずこのような現象を引き起こされる可能性が考えられるため,注意が必要である.
5 まとめ本研究では,歩行時に通常の視界から水平方向に回転した映像を提示することによる歩行誘導手法を提案した.HMD,Webカメラ,サーボモータを用いたシステムのプロトタイプを実装し,提案手法による歩行誘導が有効であるか検証するために実験を行い,歩行誘導の効果を評価した.今後,被験者を増やし,歩行距離や周囲の環境が異なる実験環境において実験を行う予定である.
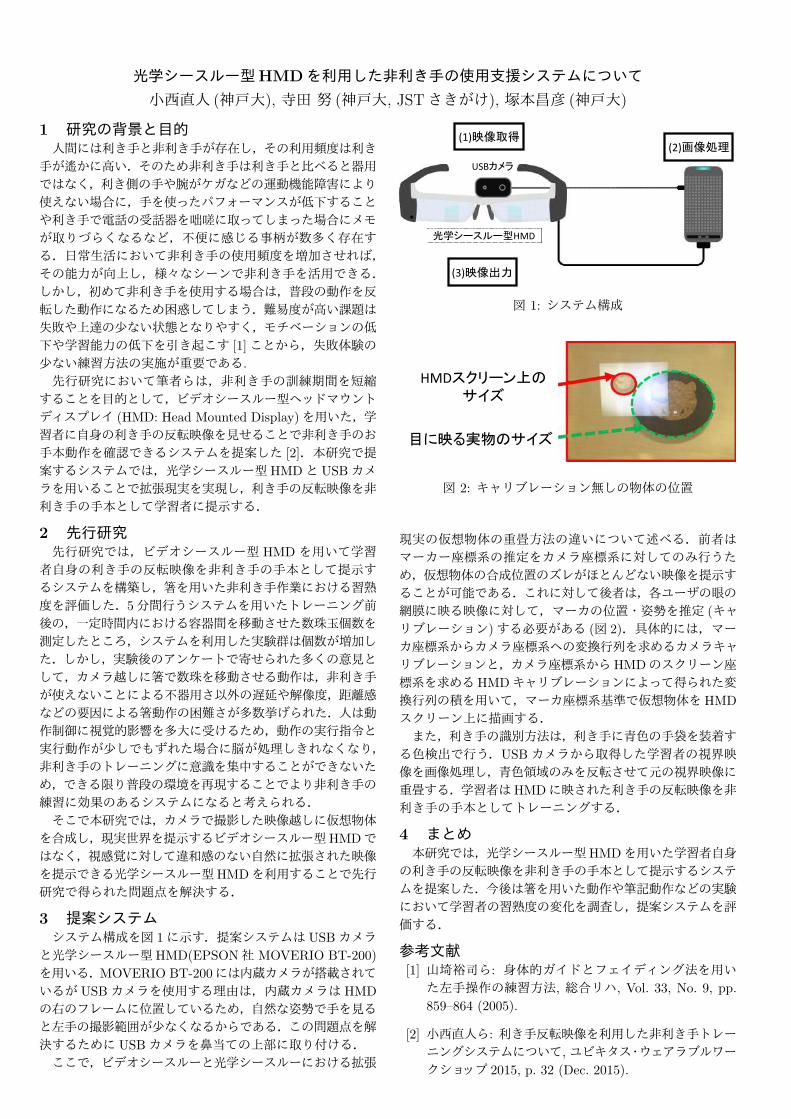
光学シースルー型HMDを利用した非利き手の使用支援システムについて
小西直人 (神戸大), 寺田 努 (神戸大, JSTさきがけ), 塚本昌彦 (神戸大)
1 研究の背景と目的人間には利き手と非利き手が存在し,その利用頻度は利き
手が遙かに高い.そのため非利き手は利き手と比べると器用ではなく,利き側の手や腕がケガなどの運動機能障害により使えない場合に,手を使ったパフォーマンスが低下することや利き手で電話の受話器を咄嗟に取ってしまった場合にメモが取りづらくなるなど,不便に感じる事柄が数多く存在する.日常生活において非利き手の使用頻度を増加させれば,その能力が向上し,様々なシーンで非利き手を活用できる.しかし,初めて非利き手を使用する場合は,普段の動作を反転した動作になるため困惑してしまう.難易度が高い課題は失敗や上達の少ない状態となりやすく,モチベーションの低下や学習能力の低下を引き起こす [1]ことから,失敗体験の少ない練習方法の実施が重要である.
先行研究において筆者らは,非利き手の訓練期間を短縮することを目的として,ビデオシースルー型ヘッドマウントディスプレイ (HMD: Head Mounted Display)を用いた,学習者に自身の利き手の反転映像を見せることで非利き手のお手本動作を確認できるシステムを提案した [2].本研究で提案するシステムでは,光学シースルー型 HMDと USBカメラを用いることで拡張現実を実現し,利き手の反転映像を非利き手の手本として学習者に提示する.
2 先行研究先行研究では,ビデオシースルー型 HMDを用いて学習
者自身の利き手の反転映像を非利き手の手本として提示するシステムを構築し,箸を用いた非利き手作業における習熟度を評価した.5分間行うシステムを用いたトレーニング前後の,一定時間内における容器間を移動させた数珠玉個数を測定したところ,システムを利用した実験群は個数が増加した.しかし,実験後のアンケートで寄せられた多くの意見として,カメラ越しに箸で数珠を移動させる動作は,非利き手が使えないことによる不器用さ以外の遅延や解像度,距離感などの要因による箸動作の困難さが多数挙げられた.人は動作制御に視覚的影響を多大に受けるため,動作の実行指令と実行動作が少しでもずれた場合に脳が処理しきれなくなり,非利き手のトレーニングに意識を集中することができないため,できる限り普段の環境を再現することでより非利き手の練習に効果のあるシステムになると考えられる.そこで本研究では,カメラで撮影した映像越しに仮想物体
を合成し,現実世界を提示するビデオシースルー型HMDではなく,視感覚に対して違和感のない自然に拡張された映像を提示できる光学シースルー型HMDを利用することで先行研究で得られた問題点を解決する.
3 提案システムシステム構成を図 1に示す.提案システムは USBカメラ
と光学シースルー型HMD(EPSON社 MOVERIO BT-200)
を用いる.MOVERIO BT-200には内蔵カメラが搭載されているが USBカメラを使用する理由は,内蔵カメラは HMD
の右のフレームに位置しているため,自然な姿勢で手を見ると左手の撮影範囲が少なくなるからである.この問題点を解決するために USBカメラを鼻当ての上部に取り付ける.ここで,ビデオシースルーと光学シースルーにおける拡張
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�������
������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
図 1: システム構成
����������
�
�� �����
図 2: キャリブレーション無しの物体の位置
現実の仮想物体の重畳方法の違いについて述べる.前者はマーカー座標系の推定をカメラ座標系に対してのみ行うため,仮想物体の合成位置のズレがほとんどない映像を提示することが可能である.これに対して後者は,各ユーザの眼の網膜に映る映像に対して,マーカの位置・姿勢を推定 (キャリブレーション)する必要がある (図 2).具体的には,マーカ座標系からカメラ座標系への変換行列を求めるカメラキャリブレーションと,カメラ座標系からHMDのスクリーン座標系を求めるHMDキャリブレーションによって得られた変換行列の積を用いて,マーカ座標系基準で仮想物体をHMD
スクリーン上に描画する.また,利き手の識別方法は,利き手に青色の手袋を装着す
る色検出で行う.USBカメラから取得した学習者の視界映像を画像処理し,青色領域のみを反転させて元の視界映像に重畳する.学習者はHMDに映された利き手の反転映像を非利き手の手本としてトレーニングする.
4 まとめ本研究では,光学シースルー型HMDを用いた学習者自身
の利き手の反転映像を非利き手の手本として提示するシステムを提案した.今後は箸を用いた動作や筆記動作などの実験において学習者の習熟度の変化を調査し,提案システムを評価する.
参考文献[1] 山埼裕司ら: 身体的ガイドとフェイディング法を用いた左手操作の練習方法, 総合リハ, Vol. 33, No. 9, pp.
859–864 (2005).
[2] 小西直人ら: 利き手反転映像を利用した非利き手トレーニングシステムについて,ユビキタス・ウェアラブルワークショップ 2015, p. 32 (Dec. 2015).

FESTIVALプロジェクトの紹介
秋山 豊和(京都産業大学)
1. 研究の背景と目的
Internet of Things (IoT) の社会への展開は我々の生活に
様々な側面で大きな影響を与えると考えられる.IoT の展開
において,テストベッドや実証実験用の施設はその大小にか
かわらず重要な役割を果たすと考えられる.FESTIVALプロ
ジェクト[1]はヨーロッパおよび日本で提供されている様々
なソフトウェア,ハードウェアを含むテストベッドを連携さ
せることで,テストベッドの利便性を向上し,IoT 実証実験
の促進を目指す.
2. これまでの研究内容
FESTIVAL プロジェクトは 2014 年 10 月に開始し,2年
に渡って研究開発を進めてきた.IoT の実証実験実施者が再
利用可能な形で既存のリソースを提供するためには,1) IoT
実証実験のユースケース調査に基づく必要機能の抽出,2) 既
存テストベッドの調査に基づく必要機能の実装方式の検討,
が必要になる.IoT実証実験のユースケースとしては,Smart
Energy, Smart Building, Smart Shopping などのアプリケ
ーション領域からいくつかのアプリケーションを取り上げ,
データ収集,データ蓄積・分析,データ可視化・施設制御な
どの要求要件について抽出した.また,これまでに調査した
既存のテストベッドのうち主なものを表 1 に示す.PTL,
iHouse などのスマートハウス実験施設,ATR DC などのス
マートデータセンタ実験施設をはじめ,JOSE, FIWARE Lab.
などのインフラ提供テストベッドなどを組み合わせることで,
IoTの実証実験環境が提供可能なことが確認できた.
以上のような調査結果に基づき,FESTIVALプラットフォ
ームのアーキテクチャを検討した.図 1にプラットフォーム
アーキテクチャの概要を示す.
表 1:日欧テストベッドの調査結果
図1:FESTIVALアーキテクチャ概要
FESTIVAL プラットフォームでは,フィールドに設置した
様々なセンサ群から情報を収集する IoT Gateway,蓄積したセ
ンサデータをオープンデータとして共有するためのオープンデ
ータプラットフォーム間の連携を担う OpenData Federation,
ITリソースを提供するテストベッドの連携を担う IT Resource
Manager,実証実験に参加するエンドユーザと実証実験実施者
のインタラクションを支援する Living Lab Managerなど,テ
ストベッドの機能分類に基づいて実証実験に必要な機能を実装
し,それらを Experimentation as a Service (EaaS)として実証
実験実施者に提供する.また,実証実験実施者からの利用を用
意にするためにポータルインタフェースを提供し,EaaS モジ
ュール群とのインタラクションにおける権限管理を実現するセ
キュリティモジュールも提供する.現在構築したプラットフォ
ー ム を 用 い て Smart House , Smart Station , Smart
Transportationなどの実証実験を開始している.
3. まとめと今後の課題
本稿では,日欧連携プロジェクト FESTIVAL において開発
している IoT実証実験プラットフォームについて紹介した.今
後プロジェクト外からも実証実験参加者を募集する予定であり,
得られたフィードバックをプラットフォームの改善に活用する
予定である.
謝辞 本研究は NICT 日欧共同委託研究の助成を受けたもの
である.
参考文献
[1] J. R. Santana, et al., “FESTIVAL: Towards an
intercontinental federation approach,” Lecture Notes
of the Institute for Computer Sciences, vol. 158
(MONAMI 2015) pp. 269-280 (Sep. 2015).
テストベッド種別 テストベッド名称
実証実験フィールド PTL,iHouse,ATRDC,The Lab.,Santander市
ソフトウェアプラットフォーム
sensiNact, FIWARE,PIAX,IEEE1888platform
オープンデータ
プラットフォームLyonオープンデータSantanderオープンデータ
インフラ提供テストベッド
JOSE,FIWARELab

エンタテインメント環境におけるコンテンツ主観化による一体感の付与について
寺田 努(神戸大,JSTさきがけ)
1 研究の背景と目的筆者は,「ウェアラブルの本質は個人化 (Personalization)
である」とこれまで述べてきた.これは,ウェアラブルコンピューティングの典型的なサービスが,装着型加速度センサ等から得られたユーザ状況 (コンテキスト)をもとに,適応的なサービスを提供するコンテキストアウェアシステムであることを含め,ウェアラブルシステムは入出力機器やコンテンツを自分の自由な形で構成することが期待されているためである.本稿では,特にエンタテインメント領域での聴衆を対象と
した個人化について議論する.エンタテインメント領域での活用例としては,筆者らの研究 [1]のように受ける情報にフィルタをかけるようなものや,アイドルグループ「東京パフォーマンスドール」の公演でエプソンのHMD「MOVERIO」を用いて特定の歌い手の歌詞をAR表示するといった取り組みが行われている [2].ソニー・ミュージックコミュニケーションズの「FreFlow(フリフラ)」のように,観客が持っているペンライトを個別に制御できるようなシステムの利用も広まりつつある.このような個人化は,個人に対するサービスレベルの向上に寄与するものではあるが,使い方を間違えると個人化によってかえって聴取体験を低下させてしまう可能性があると考える.そこで,得られる情報の正確さや便利さといった従来の個人化システムの評価軸に加え,「一体感への寄与」「役割の付与」といった要素を評価軸として考えることで,エンタテインメント業界に正しくウェアラブル技術を導入するための基本的な考え方を共有することを目指す.
2 聴衆向けエンタテインメントシステムの評価軸一体感を失わせない個人化: 従来の個人化システムは,頭部装着型ディスプレイ (HMD)等に,自分にとってのみ有用な情報を選択的に表示するようなものであった.つまり,旧来の均質な情報提供ではなく,個人個人にカスタマイズされた情報を提示することに価値があったわけである.この考え方に基づいて聴衆向けサービスをデザインしたときにもっとも近いイメージがEPSONの例であり,これはもともとのデザインではそれぞれのHMD装着者の好きな歌い手の歌詞を選択的に表示するようなものが想定されていた.しかし,ライブ等の参加者の大きな目的に,ライブ感や他の聴衆との一体感を得ることがある一方で,このようなサービスは観客間の視聴内容に差をつけることになり,これが一体感を失わせる可能性がある.つまり,過剰な個人化はエンタテインメントシステムの聴衆にとっては逆効果になる可能性がある.それでは,一体感を失わせない個人化とはなにか.まず考
えられるのは,「格差をなくすための個人化」である.一体感を高めるためには,他の人たちと同じ体験をしているという事実が重要である.したがって,人によって見える/見えない,聞こえる/聞こえないといった格差をできるだけ少なくするために個人化技術を使うことは有力である.コンサートなどでは位置や距離に応じて音量やバランス,視野が変わってしまうし,個人の聴力・視力などの五感特性によってコンテンツの聴取の仕方は変わる.そこで,それらの違いを吸収するようなウェアラブルシステムがあればより一体感は高まると考えられる.筆者らのシステム [1]はこのような例となっており,人間が感じる主観的な音量が図 1に示すよう
主観的⾳量を
下げたい箇所を選択
主観的⾳量が下がる
画像効果を施す
図 1: 個人化による音量平滑化
な視覚効果によって変化することを利用し,聴衆それぞれの楽器経験などの五感特性によらず同じ音量でコンサートが聴取できることを狙っている.役割の付与: 盛り上がった会場ではウェーブが起こったり,あるいは大きな風船をみんなで押すようなことが行われたりする.このような状態にあるとき,聴衆はそれぞれが別の体験をしているが,一体感は失われていない.これは,単純に異なる情報を得ているのではなく,与えられた特性を活かす役割を与えられている状態であると言える.また,その状態を周囲の人と共有して観察できることが大事なのではないかと考える.どういう支援をすべきか: これまでをまとめると,エンタ
テインメントシステムの聴衆向けウェアラブルシステムにとって大事なのは,一体感を失わせないために個人化技術を平滑化のために使うというアプローチを基本とすることである.また,聴衆間で協力的にものごとを進めることを支援するアプローチも有力だと言える.一方で,ある個人にしか見せない情報を用意するなど,一体感を失わせるようなアプローチをとる場合はそのポジティブな効果だけに着目するのではなく,ネガティブな効果を十分考慮してシステムを設計するべきである.
3 おわりに本稿では,ウェアラブル技術を用いたエンタテインメント
現場での観客支援について考察した.エンタテインメントの観客支援という状況では,単に出す情報のクオリティだけでなく,他の聴衆との一体感を失わせないという点を考慮する必要があることを示し,一体感や役割の付与の度合いをシステムの評価軸として利用すべきであることを述べた.ウェアラブル技術を取り入れたことによりかえって体験のクオリティを下げないように我々は注意してプロジェクトに参画する必要がある.
参考文献[1] 佐久間一平,寺田 努,塚本昌彦,“視覚効果を用いた主観的音量の制御システムの設計と実装,” エンタテインメントコンピューティング 2015, pp. 357–364 (Sep. 2015).
[2] “アイドルグループ「東京パフォーマンスドール」の公演内で実証実験,” http://www.epson.jp/osirase/2013/
130808.htm (Aug. 2013).

神戸マラソン 2016におけるウェアラブルデバイスの実証実験
塚本昌彦(神戸大)
1. 研究の背景と目的
マラソンでウェアラブルデバイスは有用か無用か?ラン
ナーやコース,沿道の応援者にかかわる情報をリアルタイム
でランナーや応援者に提供するウェアラブルデバイスのプラ
ス面は明らかだが,装置の重量や不快感などのマイナス面を,
人間が極限状態で自分と戦うマラソン領域において補うこと
ができるのかを見極めたい.このようなマラソン領域でのウ
ェアラブルデバイス活用の有効性について検証するために,
筆者は神戸マラソン 2016 に参加し実証実験を行った.これ
まで同主旨の実験を,大阪マラソン 2014, 2015, 神戸マラソ
2015[1]で行ったが,今回神戸市ウェアラブルデバイス推進会
議とアシックスによる共同の実証実験として,特に複数デバ
イスの併用と比較を主眼として実施した.
2. 研究内容
今回のランナーの装着機器は以下のとおりである(図 1).
・神戸市,アシックスの実験として,アシックスの専用アプ
リケーションを搭載したソニースマートウォッチとコース内
約 40か所で通過時間を計測する BLEタグを用いた.
・その他のデバイスとして,ジョギング専用グラス Recon
JET,ジョギング専用イヤホン型デバイス Sony Smart B-
Trainer,Apple Watch(ワークアウト),ポケモン GO Plus,
リコーTheta(帽子に装着),Android スマホ(Runkeeper,
ポケモン GO),iPhone(Runtastic),E-mobile ルータ,モ
バイルバッテリ 3個(ポーチに収納)を用いた.
・大会システムとして,NFC タグ(ゼッケン裏)を用いた.
公開されている公式記録を図 2 に示す(http://p.kobe-
marathon.net/numberfile/37409.html より).25km から失
速したが,ネット 5時間 37分 17秒で完走した.筆者の 4回
のフルマラソン経験の中では 3番目の記録となった.
経過は次のとおりである.まず,スタート直前にトイレが
混んでいてスタートぎりぎりにスタート地点に着いた.スタ
ートゲート(スタート地点とは別)直前で Runtastic と
Runkeeper をスタートしたのち,Recon JET をスタートす
るが GPS がデバイスで取得できず,しばらく立ち止まった
が駄目なので諦めて出発した.Smart B-trainer をスタート
しようとしたが右手と左手を間違えて操作し忘れた.その後
図 1:当日の様子 図 2.公式記録
図 3:様々なデバイスによる平均ペースの推移
ミスに気づき,Smart B-trainerと Sony Smart Watchをス
タートした.Recon JET は何度かリセットして 6km 地点で
GPS を捕捉した.25km 地点で足がつって以降失速した.
iPhoneと Smart B-trainerが約 4時間(35km地点)でバッ
テリ切れした.Runkeeperは誤ってアプリを終了したかと思
っていたが動いていて,帰宅まで記録が取られた.Ricoh
Theta では 1 分~5 分程度の動画を 20 本程度撮影した.ラ
ンナー本人だけでなく前方,横方,天地が同時に撮影された.
ポケモンGOは Bluetoothの接続が悪くすぐに切れてしま
い,ほとんど実行できなかった.ポケモン獲得 25匹,アイテ
ム獲得 26 個,卵ふ化 1 匹,相棒ポケモンのアメ 1 個という
結果で,日ごろの 10km程度のジョギング以下であった.
図 3に様々なデバイスで取得した平均ペースの推移を示す.
前述の経過が複数のデバイスで如述に記録されている。
3. まとめと今後の課題
今回はスタート時のトラブルが重なり、ミスの連鎖を誘発
した.最終的に有用か無用かはユーザの使いこなしに委ねら
れることが改めて明らかになったといえる.
参考文献
[1] 塚本昌彦 : 神戸マラソン 2015 報告 , 神戸市 ,
http://www.city.kobe.lg.jp/information/project/innovat
ion/wearable/sankoushiryou4-1.pdf.
Related Documents






![九州工業大学(飯塚) 生協学生委員二年 [ 委員長 ] 原 賢太](https://static.cupdf.com/doc/110x72/568151fb550346895dc03296/-568151fb550346895dc03296.jpg)




