1 Underwater Sensor Networks: The physical layer Short tutorial on the physics of sound in underwater environments. Jens M. Hovem Scientific Advisor SINTEF-ICT Professor emeritus NTNU [email protected] Sensorcom2009 Athens

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
Underwater Sensor Networks:The physical layer
Short tutorial on the physics of sound in underwater environments.
Jens M. HovemScientific Advisor SINTEF-ICT
Professor emeritus NTNU [email protected]
Sensorcom2009 Athens
2
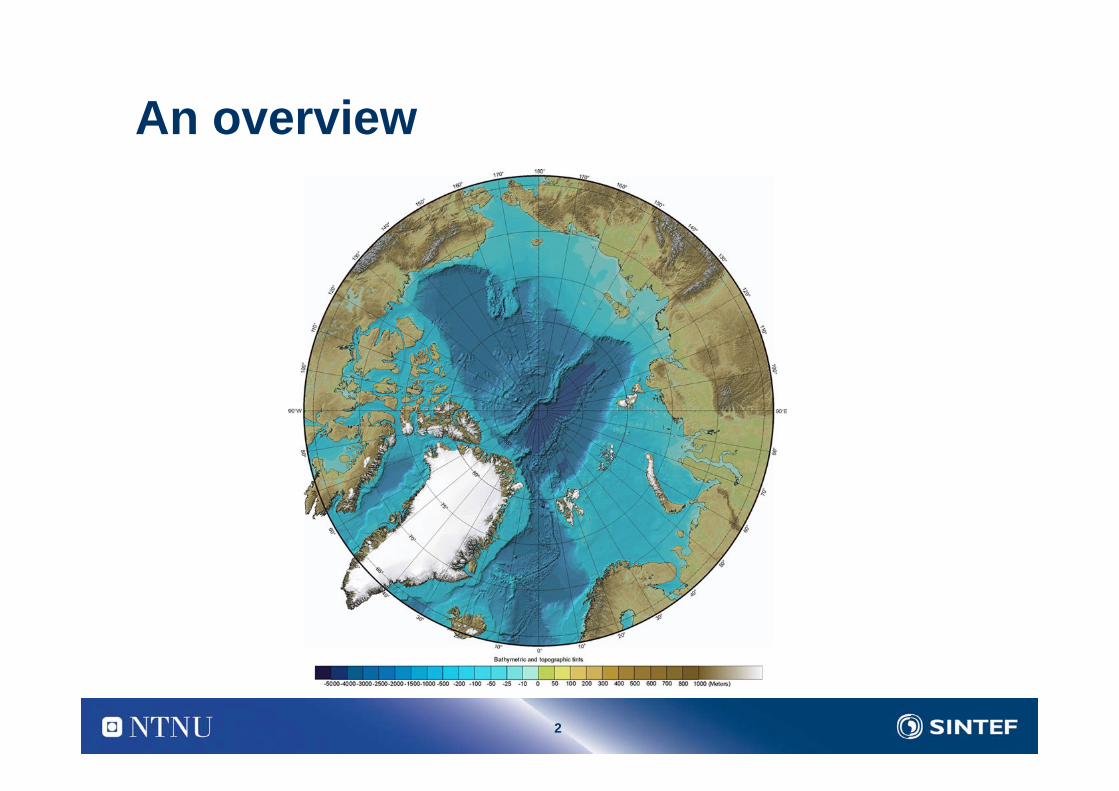
An overview
3
Applications of Marine Acoustics
• Military applications and surveying of coastal areas, vessels and mines.• Fishery acoustics and abundance estimation of fish and plankton.• Sea floor acoustics, hydrography and mapping of the topography and structure of the
sea floor and sub-bottom. • Underwater communication • Underwater navigation and position reference systems.• Acoustic remote sensing of the oceanic conditions.
4
Issues in Acoustic Underwater Communication
Low data rates: Bandwidth limitations, absorption, noise.Channel characteristics: Range (time) and frequency shift (Doppler). Coherence degradationOceanic variability: Significant problem, but the seriousness dependent on positions of the nodes.Transmitters/receivers: No standards (jet) and limited availability.
5
Applications of UAN
• Environmental data: Large area, very low datarates, long lifetimes.
• Protection of critical structures: Harbors, oil and gas pipes, offshore production faclities
• Event driven applications: Oil and gas leakage, pollution monitoring, equipment malfunctioning.
• Stationary sensor networks (often backup system for other systems)
• Ad-hoc sensor networks
6
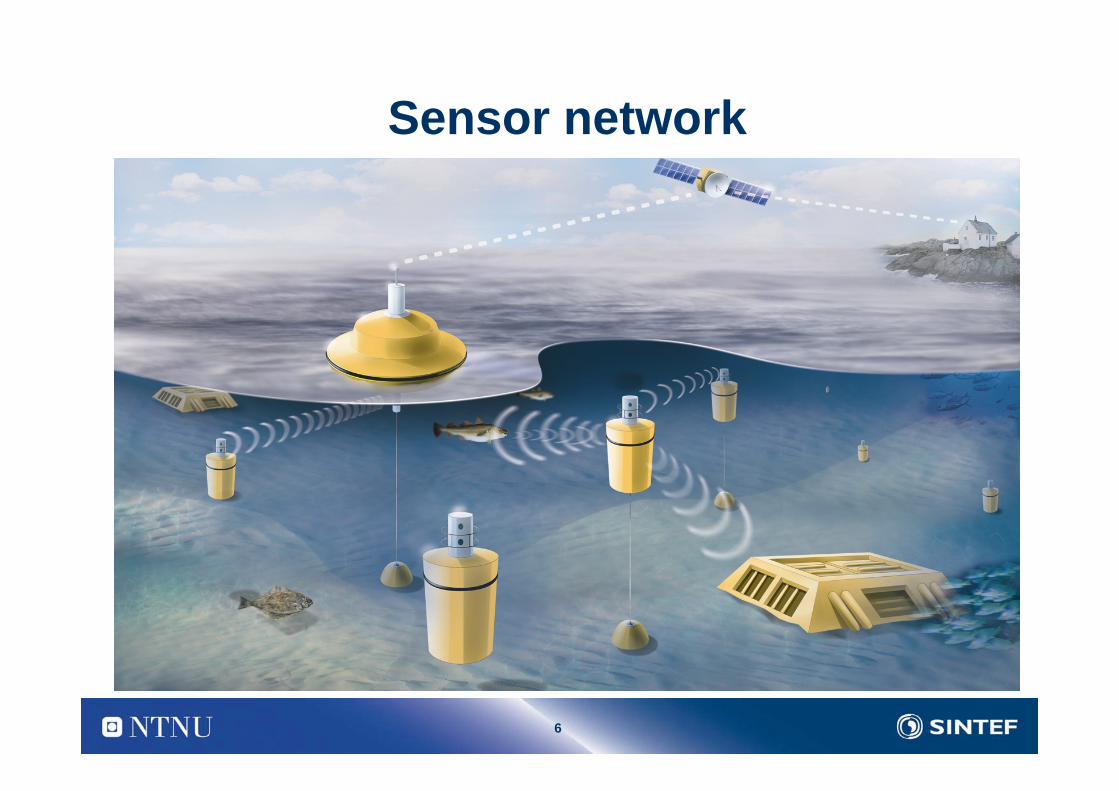
Sensor network
•
7
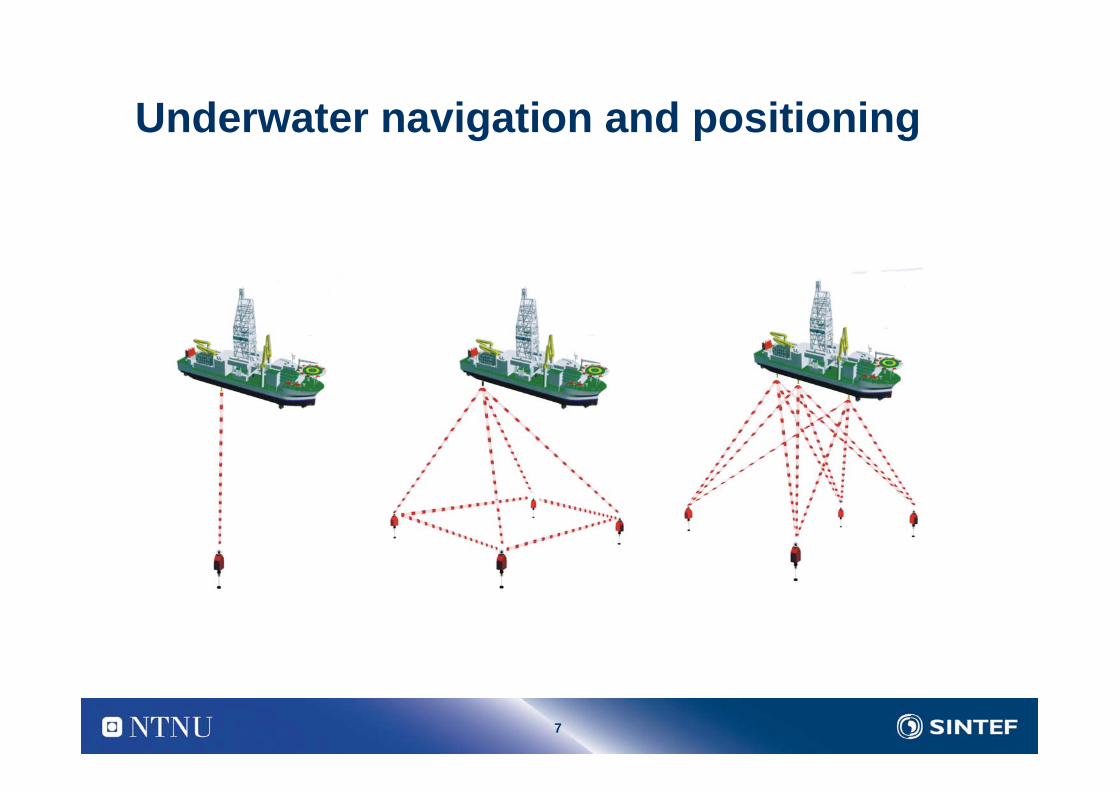
Underwater navigation and positioning
8
Autonomous Underwater Vehicles
9
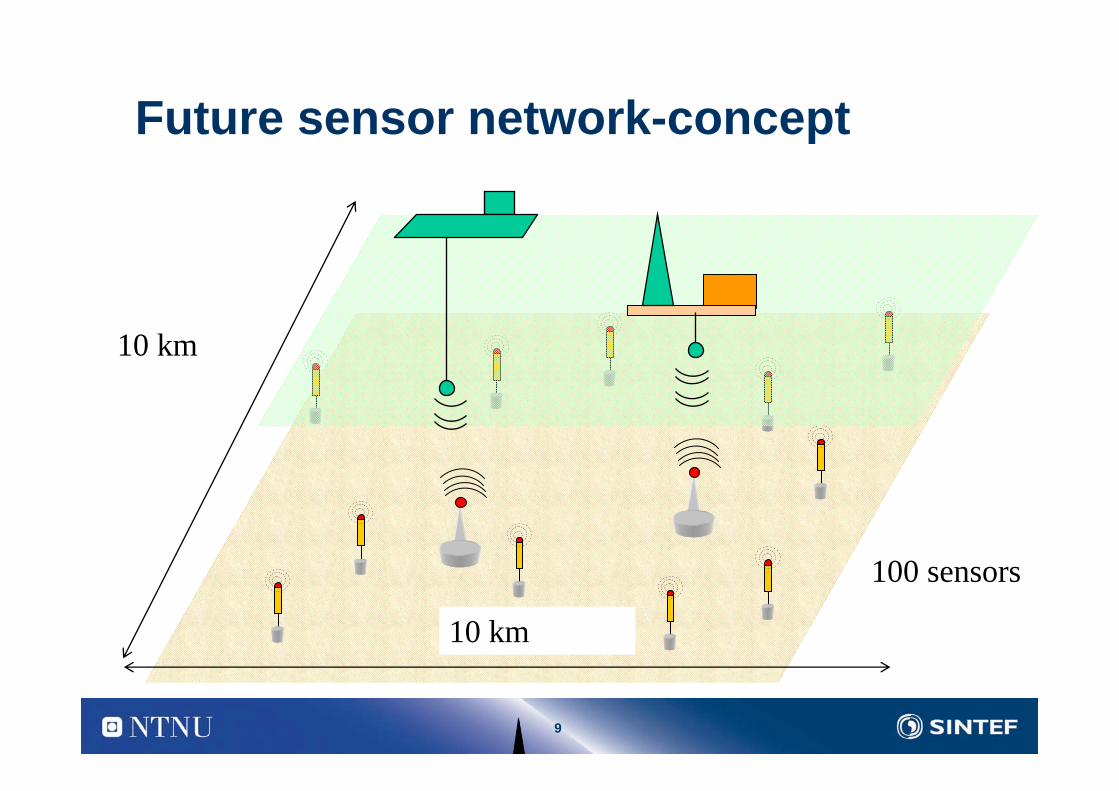
Future sensor network-concept
10 km
10 km
100 sensors
10
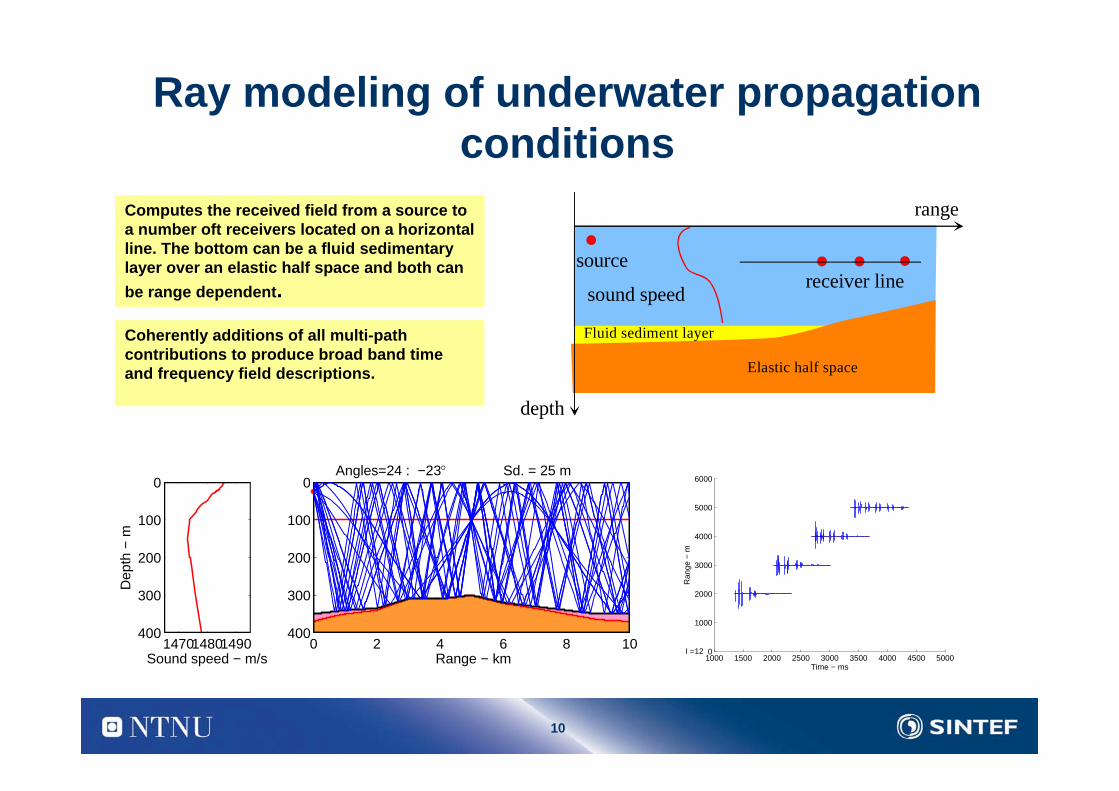
Ray modeling of underwater propagation conditions
depth
range
sound speed
sourcereceiver line
Elastic half space
Fluid sediment layer
1.Computes the received field from a source to a number oft receivers located on a horizontal line. The bottom can be a fluid sedimentary layer over an elastic half space and both can be range dependent.
147014801490
0
100
200
300
400
Sound speed − m/s
Dep
th −
m
0 2 4 6 8 10
0
100
200
300
400
Range − km
Angles=24 : −23° Sd. = 25 m
1000 1500 2000 2500 3000 3500 4000 4500 50000
1000
2000
3000
4000
5000
6000
I =12
Time − ms
Ran
ge −
m
1.Coherently additions of all multi-path contributions to produce broad band time and frequency field descriptions.
11
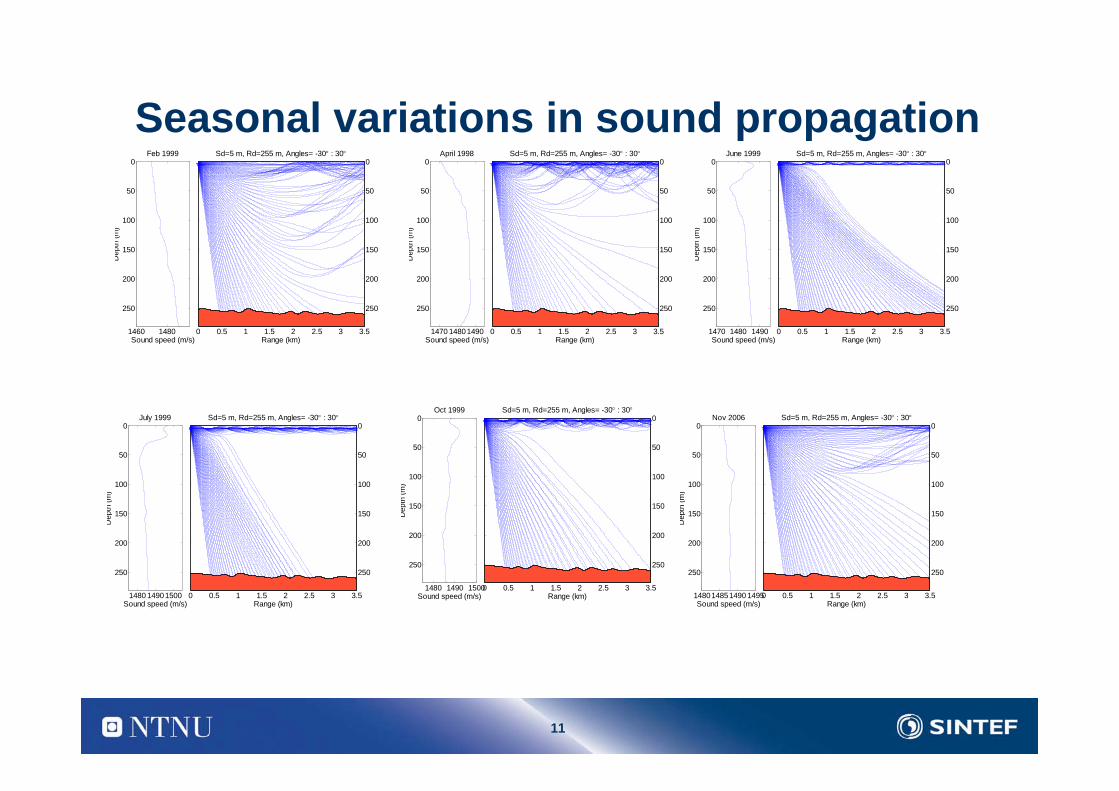
Seasonal variations in sound propagation
1460 1480
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)
Feb 1999
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=5 m, Rd=255 m, Angles= -30° : 30°
1470 14801490
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)
April 1998
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=5 m, Rd=255 m, Angles= -30° : 30°
1470 1480 1490
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)
June 1999
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=5 m, Rd=255 m, Angles= -30° : 30°
1480 14901500
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)
July 1999
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=5 m, Rd=255 m, Angles= -30° : 30°
1480 1490 1500
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)Oct 1999
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=5 m, Rd=255 m, Angles= -30° : 30°
148014851490 1495
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)
Nov 2006
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=5 m, Rd=255 m, Angles= -30° : 30°
12
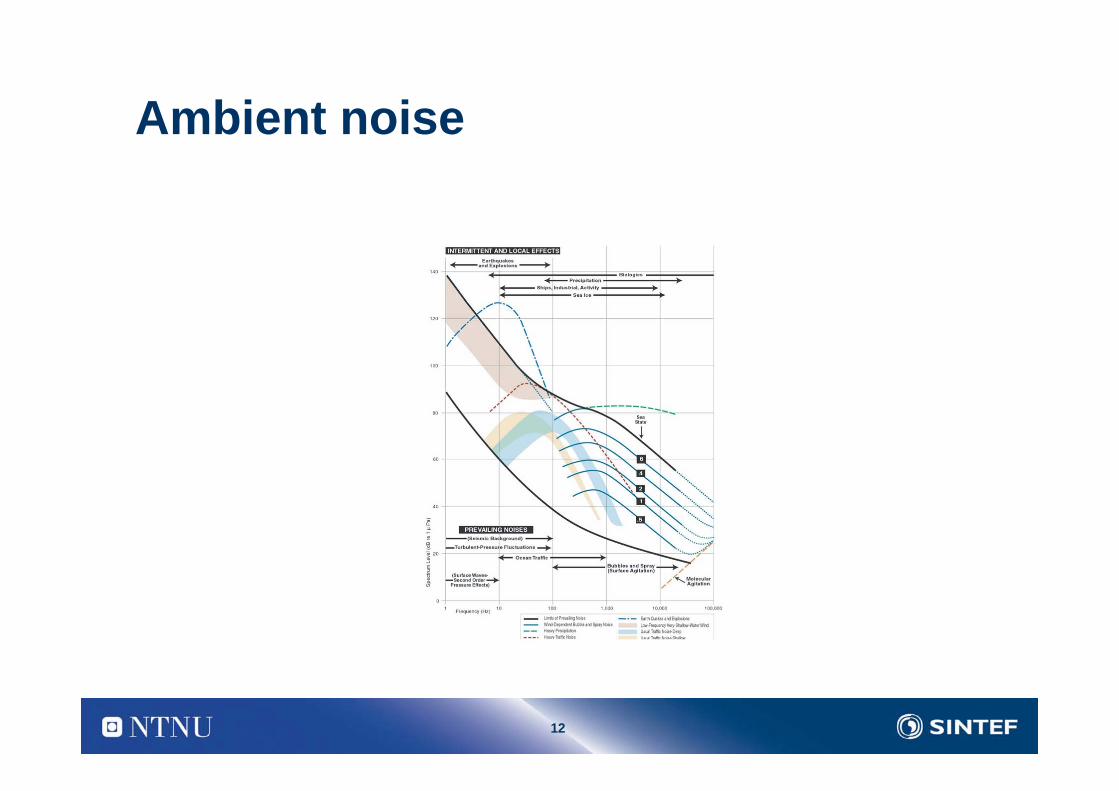
Ambient noise
13
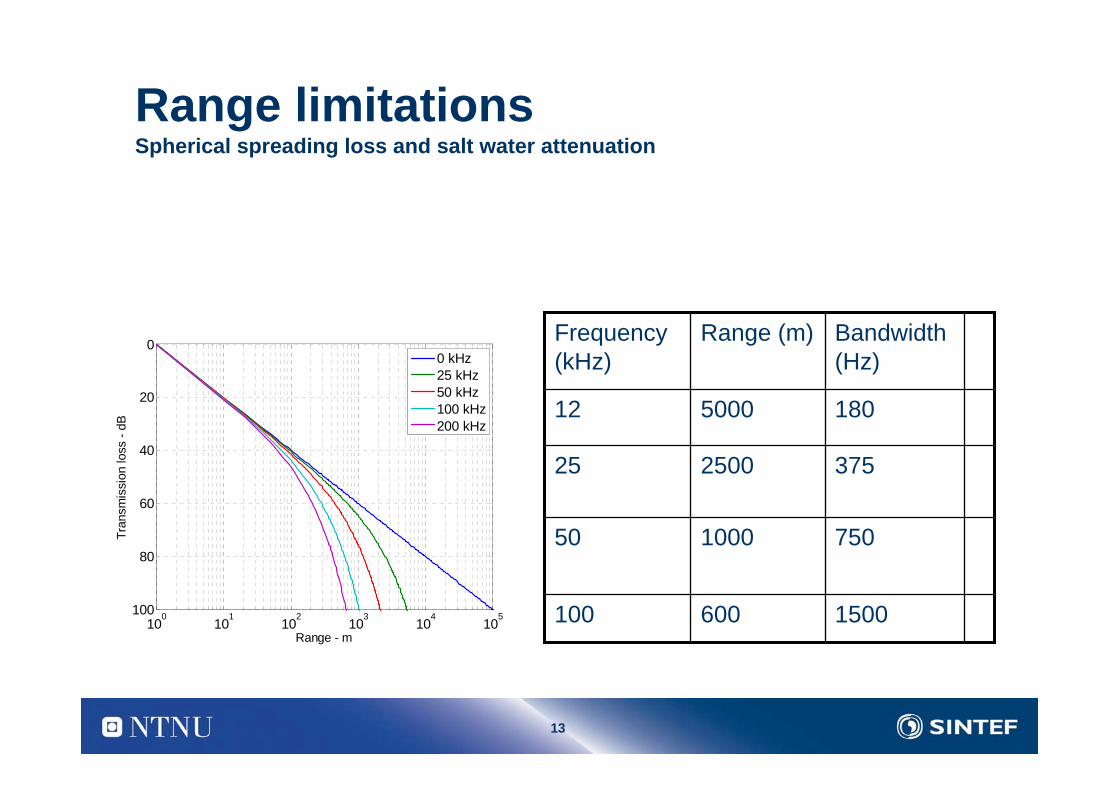
Range limitationsSpherical spreading loss and salt water attenuation
100
101
102
103
104
105
0
20
40
60
80
100
Range - m
Tran
smis
sion
loss
- dB
0 kHz25 kHz50 kHz100 kHz200 kHz
750100050
1500600100
375250025
180500012
Bandwidth (Hz)
Range (m)Frequency (kHz)
14
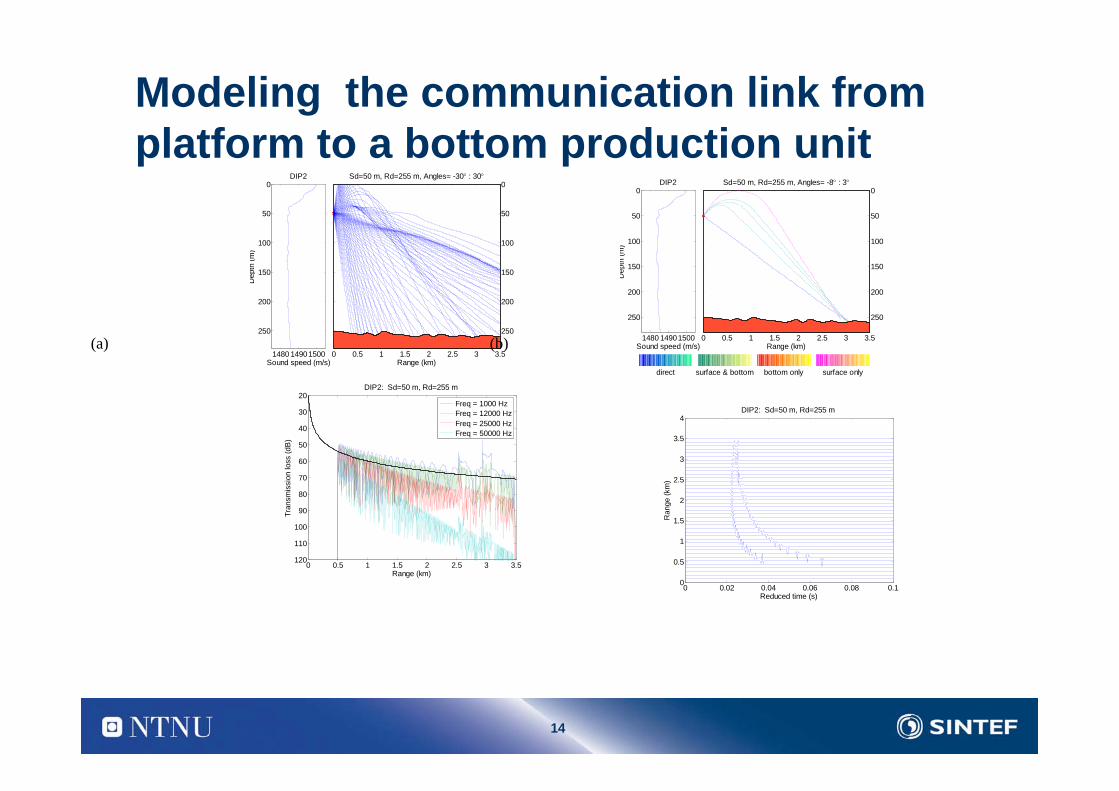
Modeling the communication link from platform to a bottom production unit
1480 14901500
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)
DIP2
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=50 m, Rd=255 m, Angles= -30° : 30°
1480 14901500
0
50
100
150
200
250
Sound speed (m/s)
Dep
th (m
)
DIP2
0 0.5 1 1.5 2 2.5 3 3.5
0
50
100
150
200
250
Range (km)
Sd=50 m, Rd=255 m, Angles= -8° : 3°
direct surface & bottom bottom only surface only
0 0.5 1 1.5 2 2.5 3 3.5
20
30
40
50
60
70
80
90
100
110
120
Range (km)
Tran
smis
sion
loss
(dB
)
DIP2: Sd=50 m, Rd=255 m
Freq = 1000 HzFreq = 12000 HzFreq = 25000 HzFreq = 50000 Hz
0 0.02 0.04 0.06 0.08 0.10
0.5
1
1.5
2
2.5
3
3.5
4
Reduced time (s)
Ran
ge (k
m)
DIP2: Sd=50 m, Rd=255 m
(a) (b)
15
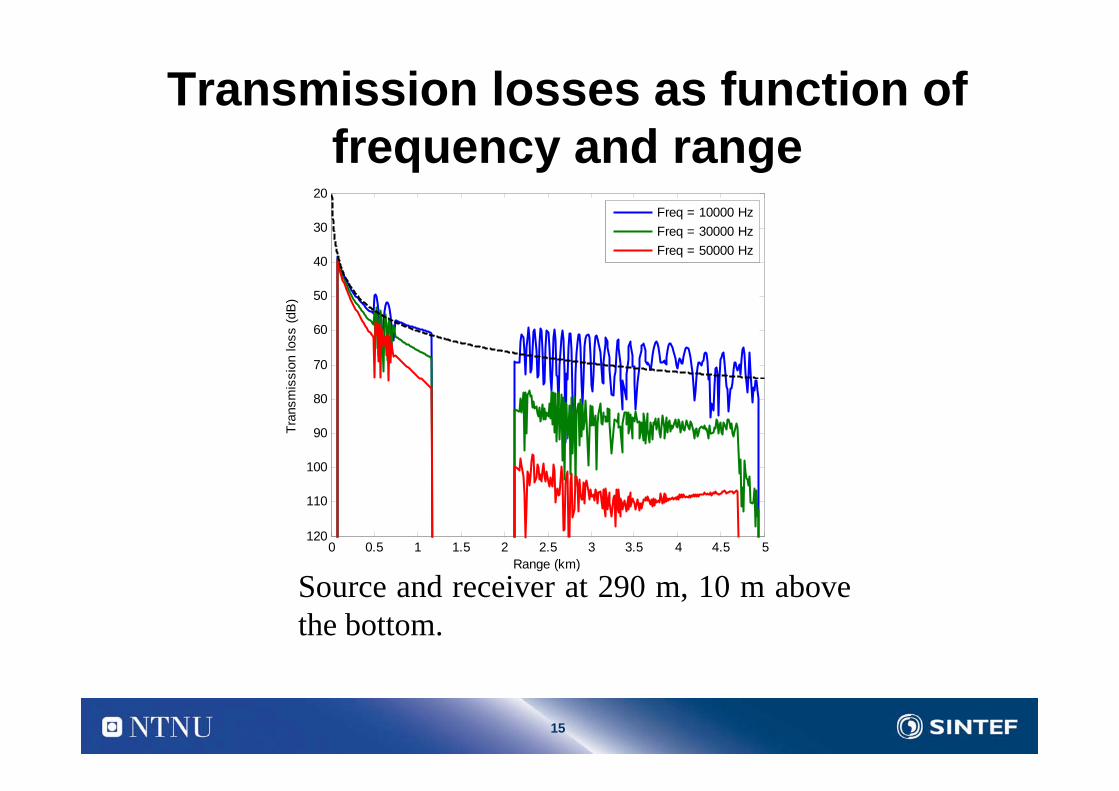
Transmission losses as function of frequency and range
Source and receiver at 290 m, 10 m above the bottom.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
20
30
40
50
60
70
80
90
100
110
120
Range (km)
Tran
smis
sion
loss
(dB
)
Freq = 10000 HzFreq = 30000 HzFreq = 50000 Hz
16
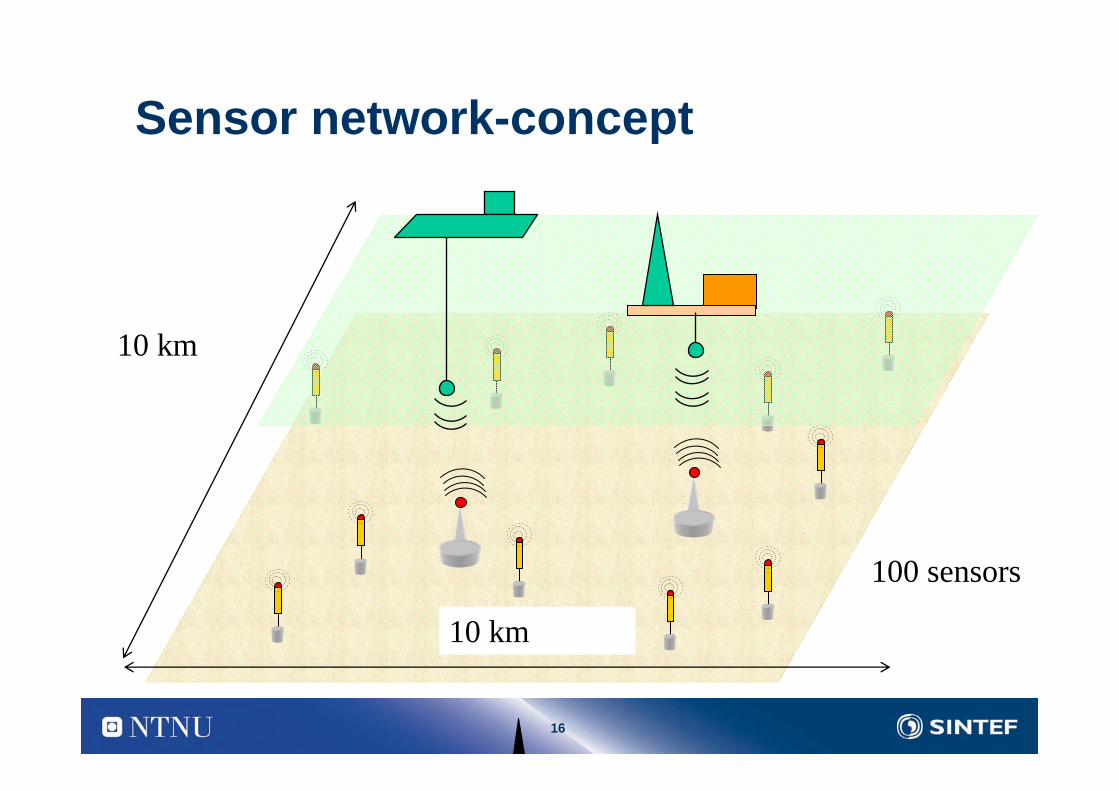
Sensor network-concept
10 km
10 km
100 sensors
17
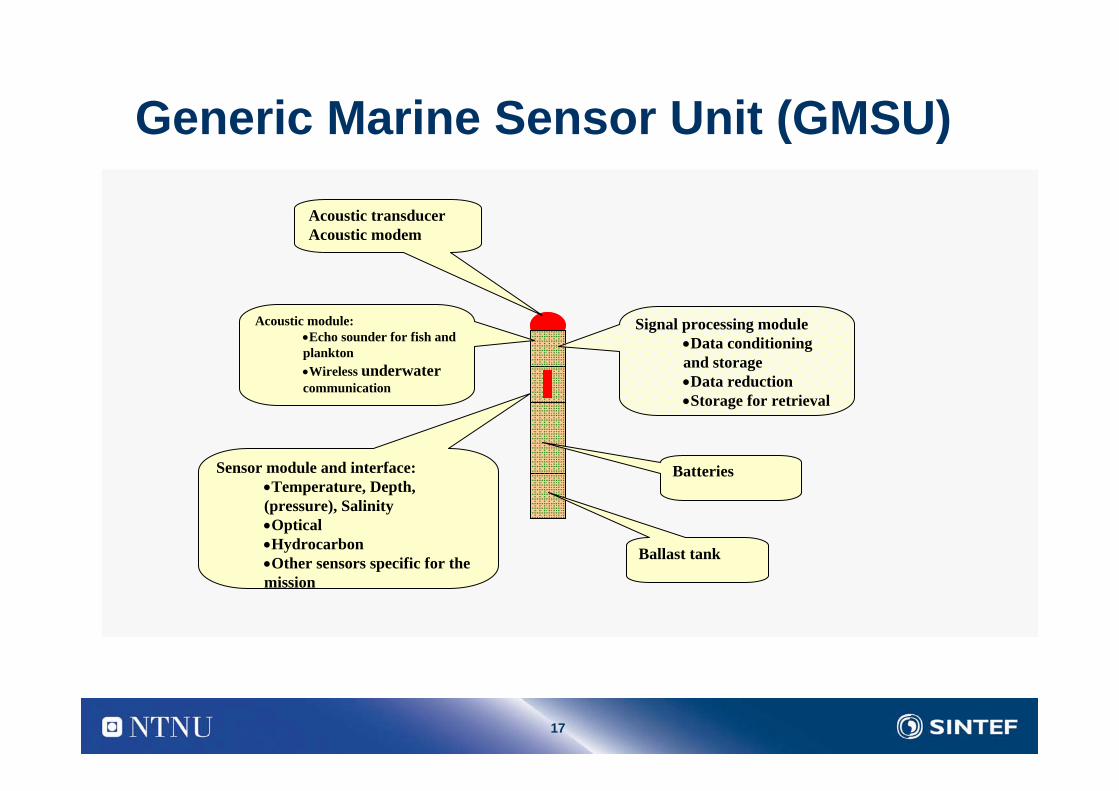
Generic Marine Sensor Unit (GMSU)
Signal processing module•Data conditioning and storage •Data reduction •Storage for retrieval
BatteriesSensor module and interface:•Temperature, Depth, (pressure), Salinity•Optical•Hydrocarbon•Other sensors specific for the mission
Ballast tank
Acoustic module:•Echo sounder for fish and plankton •Wireless underwatercommunication
Acoustic transducerAcoustic modem
18
Conclusion and recommendations
• We ( the underwater people) have a lot to learn from you(the earth people)
• If you want to be successful and useful in our field, youneed to understand our problem
19
What to learn more….?
To be published by:
Peninsula Publishing Company, Los Altos, California, USA
Related Documents











