The Potential of Seaplanes as Future Large Airliners E Levis 1 and V C Serghides 1,2 1 Department of Aeronautics, Imperial College London, UK 2 School of Engineering and Applied Sciences, Frederick University, Cyprus Abstract Ever stricter environmental pollution and noise constraints are posing a barrier to the expansion of many already constrained major airports. This paper proposes that seaplanes can be used for long range airline operations, moving low level flightpaths of large aircraft offshore. A novel configuration aimed at alle- viating the various drawbacks seen in past sea- plane designs is presented and discussed. A complete design framework for the design of modern seaplanes is presented, concentrating on novel methods developed for the design of seaplanes to a takeoff distance constraint. A family of sample aircraft designed to transport between 200 and 2000 passengers is presented and common performance characteristics ob- served are discussed. Nomenclature wing aspect ratio ASK air seat kilometre B beam width BPR turbofan bypass ratio C Do zero-lift drag coefficient C L lift coefficient C Lmax maximum lift coefficient C V velocity coefficient C Δ beam loading e Oswald efficiency factor g acceleration of gravity dh/dt climb/descent rate h OBS obstacle height L/B hull length to beam ratio L f /B hull forebody length to beam ratio L/D lift to drag ratio N e number of engines q ∞ freestream dynamic head T/W thrust to weight ratio T /W mean takeoff thrust to weight ratio V ∞ freestream velocity V appr design approach speed V R takeoff rotation speed W/S wing loading W L /W o landing to takeoff weight fraction β hull deadrise angle Δ aircraft load on water ρ density of air ρ w density of water σ atmospheric density ratio 1 Introduction Aviation business forecasts continue to pre- dict a substantial increase in global air traffic, while the aviation industry is under ever in- creasing pressure to reduce noise and emissions. In fact concerns about noise and atmospheric pollution in areas surrounding major airports are already affecting the capacity and expan- sion potential of existing airports, at a time when many major hubs are already operating at maximum capacity. One approach to reducing the impact of avi- ation on populated areas is moving major air- ports offshore, thus also moving takeoff and ap- proach paths over water. Such concerns, com- bined with limited land being available for the expansion of some aerodromes near large cities, have led to the construction of offshore airports such as Kansai International and Hong Kong International and the proposal for an airport in the Thames Estuary. Land reclamation how- ever, combined with the need for new termi- 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

The Potential of Seaplanes as Future Large Airliners
E Levis1 and V C Serghides1,2
1Department of Aeronautics, Imperial College London, UK2School of Engineering and Applied Sciences, Frederick University, Cyprus
Abstract
Ever stricter environmental pollution andnoise constraints are posing a barrier to theexpansion of many already constrained majorairports. This paper proposes that seaplanescan be used for long range airline operations,moving low level flightpaths of large aircraftoffshore. A novel configuration aimed at alle-viating the various drawbacks seen in past sea-plane designs is presented and discussed. Acomplete design framework for the design ofmodern seaplanes is presented, concentratingon novel methods developed for the design ofseaplanes to a takeoff distance constraint. Afamily of sample aircraft designed to transportbetween 200 and 2000 passengers is presentedand common performance characteristics ob-served are discussed.
Nomenclature
A wing aspect ratioASK air seat kilometreB beam widthBPR turbofan bypass ratioCDo zero-lift drag coefficientCL lift coefficientCLmax maximum lift coefficientCV velocity coefficientC∆ beam loadinge Oswald efficiency factorg acceleration of gravitydh/dt climb/descent ratehOBS obstacle heightL/B hull length to beam ratio
Lf/B hull forebody length to beam ratioL/D lift to drag ratioNe number of enginesq∞ freestream dynamic headT/W thrust to weight ratio
T/W mean takeoff thrust to weight ratioV∞ freestream velocityVappr design approach speedVR takeoff rotation speedW/S wing loadingWL/Wo landing to takeoff weight fractionβ hull deadrise angle∆ aircraft load on waterρ density of airρw density of waterσ atmospheric density ratio
1 Introduction
Aviation business forecasts continue to pre-dict a substantial increase in global air traffic,while the aviation industry is under ever in-creasing pressure to reduce noise and emissions.In fact concerns about noise and atmosphericpollution in areas surrounding major airportsare already affecting the capacity and expan-sion potential of existing airports, at a timewhen many major hubs are already operatingat maximum capacity.
One approach to reducing the impact of avi-ation on populated areas is moving major air-ports offshore, thus also moving takeoff and ap-proach paths over water. Such concerns, com-bined with limited land being available for theexpansion of some aerodromes near large cities,have led to the construction of offshore airportssuch as Kansai International and Hong KongInternational and the proposal for an airport inthe Thames Estuary. Land reclamation how-ever, combined with the need for new termi-
1

nal buildings and runways to be constructed,is extremely expensive with all three of theseprojects costing or expected to cost in excessof $20 billion.
A radical alternative that would negate theneed for such extreme infrastructure expendi-ture would see the use of waterborne aircraft forlong haul flights. This transition could be pos-sible if seaplanes are used for hub-to-hub traf-fic with connecting journeys to smaller inlandairports on amphibian or conventional designregional aircraft. Figure 1 illustrates that 16 ofthe 32 major worldwide airline hubs are alreadysituated in a coastal area, while another 8 arewithin 50 miles of the coast facilitating passen-ger transit, making such a move feasible.
Another potential advantage of not operat-ing from paved runways is that seaplanes op-erating between major seaports could be de-signed and optimised for much higher passen-ger capacities than currently possible, reducingthe number of trips required to carry a givennumber of passengers. Furthermore should de-mand for any particular destination increase,the airport will not be constrained by the num-ber of available paved runways reducing thecost of expansion.
Figure 1: Proximity of major airline hubs tothe coast
The major obstacle to the adoption of water-borne aircraft however is the efficiency penaltythat has historically been associated with op-erating from water. The work presented in thispaper therefore aimed at investigating the vi-ability of seaplanes as a 21st century mode oftransport by developing a design framework toallow their rapid sizing and performance pre-diction. A novel aircraft configuration aimed ataddressing past seaplane shortfalls is presented
followed by novel methodologies developed forthe initial sizing of water-borne aircraft. Theoverall design framework is briefly presented,followed by a discussion of the predicted per-formance of a family of sample aircraft.
2 Formulation of a Future SeaplaneConcept
In order for the use of water-borne aircraftto be viable, levels of fuel efficiency compara-ble to those of current or future generation air-craft should be achievable. This is achieved byselecting a configuration that maximises lift todrag ratio (L/D), minimises structural weightand features more fuel efficient engines, whileallowing the aircraft to operate from water andexhibit both good seaworthiness and airworthi-ness characteristics.
Seaplanes of conventional design suffer fromincreased drag and structural weight due to theneed for the fuselage to be shaped and rein-forced for water-borne operations. A V-shapedhull is necessary to provide good running char-acteristics on water, while reducing the signifi-cant impact loads encountered when landing.Non-circular hulls with sharp edges howeverlead to a substantial increase in fuselage drag,both as a result of increased surface area andinterference drag. The fuselage pressure dragis further increased by the use of steps, verti-cal discontinuities on the hull surface aimed atnegating hydrodynamic suction at high speedsand allowing the aircraft to plane. Stinton [1]indicates that using a V-shaped underside re-sults in a 9-10% increase in fuselage drag, whilethe addition of a normal step further increasesdrag by 20-38% . Another design characteris-tic unique to seaplanes is the need for tip floats,used to ensure the aircraft is laterally stable onthe water surface, which add further structuralweight and increase the aircraft’s drag.
These unwanted side effects of designing air-craft capable of operating from water can bealleviated by opting for a Blended Wing Body(BWB) configuration. Blending the hull withthe aircraft’s centre section does not severelyaffect the centre-body’s streamlined design,thus improving the aircraft’s aerodynamic ef-ficiency by reducing both wetted area and in-terference drag. To reduce the level of drag
2

−30 −20 −10 0 10 20 30
−6
−4
−2
0
2
4
6
8
10
12
14
−30 −20 −10 0 10 20 30−10
−5
0
5
10
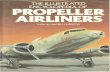
Figure 3: Hull lines of the baseline aircraft
Figure 2: Isometric view of the baseline aircraftshowing the placement of major systems. Pas-senger cabin shown as dashed red, cargo baysas dashed blue and fuel tanks as dashed blacklines
resulting from flow separating at the step dur-ing flight a 9:1 straight fairing will be used, aswind tunnel tests [2] have shown it can reducethe drag contribution of the step by up to 80%at high Reynolds numbers. Despite these im-provements however, the underside of the air-foil sections used for the centre-body, as seen inFig. 4, must be altered substantially to incorpo-rate the hull step (or its fairing) and afterbodygeometry, resulting in a moderate amount ofnegative camber. Further improvements rela-tive to seaplanes of conventional design, shouldarise from the reduced structural weight of theaircraft exhibited by past BWB design studies.
The section of the wing just outboard ofthe hull will be clear of the water at maxi-mum draught, thus not adversely affecting theaircraft’s resistance when on water. As seenin previous designs such as the Vultee Skateand the Beriev Be-103 this section will furtheract as a sponson, improving lateral stabilityon the water and eliminating the need for tipfloats. Figure 2 illustrates the general layout ofthe baseline aircraft, indicating that passengersand/or payload will be housed above hull and
in this first outboard wing section, the spanof which is determined by both volume andwater-borne stability requirements. In orderfor the wing further outboard to be optimisedfor cruise and its structural weight to be min-imised it will be kept clear of water at all timesby using varying levels of dihedral, as seen inFig. 3. In cases where the centre section thick-ness is not large enough, this may result in agull wing design. The high position of the wingis also advantageous in allowing emergency ex-its to be placed not only along the leading edgebut also along the side of the aircraft, address-ing a longstanding issue with BWB designs.This heavy dihedral, combined with the use oftip fins and the aft sweep of the aircraft, aimedat allowing efficient cruising in the transonicregime, should further act to improve the air-craft’s lateral stability characteristics in flight,negating the need for a vertical stabiliser.
Unlike most past seaplane designs, this air-craft is expected to fly at transonic speed andtherefore high bypass ratio turbofans or prop-fans will be used as they operate optimally inthose conditions, minimizing the powerplant’sspecific fuel consumption and therefore improv-ing overall flight efficiency. The engines will bemounted on top of the aircraft centre section,close to the trailing edge, thus shielding them
Figure 4: Spanwise variation of airfoil sections(a) with and (b) without fairing
3

from spay and attenuating the level of noisereaching the surface during take off or land-ing. Due to the lack of a horizontal stabiliser,only leading edge high lift devices (slats) willbe utilised, providing a moderate increase install angle of attack and maximum lift coef-ficient during takeoff and landing. To effec-tively control a tailless aircraft in pitch ele-vators must cover much of the trailing edge,while elevons/drag rudders situated near thewing tips are used to control the aircraft in rolland yaw.
3 Sizing to Constraints
The aircraft wing and powerplant are thefirst to be sized in the design process, consider-ing the performance objectives that the aircraftmust meet. As with the sizing of conventionalaircraft, thrust matching constrains are set forthe various cruise segments, as well as the thedesired maximum airspeed and ceiling. Equa-tion (1) is also used to ensure that the criticalflight phase minimum climb gradient require-ments detailed in FAR-25 are met, where ex-tension of the step fairing explained in section2 is considered equivalent to retracting the un-dercarriage.
T
W=dh/dt
V∞+q∞CD0
W/S+
W/S
q∞πAe(1)
Ensuring that the aircraft can takeoff or landwithin a given distance may not seem relevantto the design of seaplanes, as the constraint ofa paved runway no longer exists. That mayindeed be the case if operating from open wa-ter but coastal areas are often congested andit is fair to assume that seaplanes will be oper-ating from some predefined area, kept off lim-its to maritime traffic in the interest of safety.Moreover, even if the use of takeoff distanceconstraints is not considered necessary, take-offs from a rough surface could be uncomfort-able for passengers and therefore setting a max-imum time to liftoff can serve to limit that dis-comfort.
No further consideration is given to the land-ing distance constraint as in the case of sea-planes, the high levels of hydrodynamic resis-
tance ensure that landing distances are almostalways lower that the takeoff distance required.
For conventional aircraft operating fromhard or soft surfaces, the takeoff distance hasbeen empirically found to be a linear functionof the takeoff Parameter (TOP), given by
STO = A · TOP = A · W/S
σCLmax(T/W )(2)
where A is determined from analysis of past air-craft designs. This approach is widely used inthe initial sizing stage to determine field lengthconstraints, however the takeoff distance is sim-ply related to the aircraft stall speed and theamount of power available while all other con-tributing parameters such as aerodynamic dragand rolling friction are averaged across all typesof aircraft. A more detailed approach to imple-menting the takeoff distance to obstacle heightconstraint is given by Torenbeek [3] as the sumof the ground and airborne takeoff distances:
STO =9.34× 10−4W/S
ρ[CLmax(T/W − µ)− 0.72CDo ]+
+hOBS
tan |0.9T/W − 0.3/√A|
(3)
where the average thrust produced by a turbo-fan engine during takeoff is empirically givenas:
T/W = 0.75
(5 +BPR
4 +BPR
)(T
W
)o
(4)
This method was found to produce reasonableresults if a value of the rolling resistance (µ),or in this case a measure of the mean hydrody-namic resistance to weight ratio, in the rangeof 0.15-0.25 was used. There is however noconsistent way of relating the value of µ to beused to the hull’s major hydrodynamic designcharacteristics. Consequently a new methodfor rapidly predicting the takeoff distanceof seaplanes during initial sizing, based onthe aircraft’s aerodynamic, propulsive andhydrodynamic characteristics, is needed.
In the absence of consistent data for the take-off performance of existing seaplane designs ora large enough sample size, takeoff simulationswere carried out utilising hydrodynamic resis-tance and trim data originating from towingtank tests of 78 distinct hull shapes reported
4

by NACA. Based on the method presented byTorenbeek [3], the takeoff distance with All En-gines Operating (AEO) is given as the sum ofthe ground roll, rotation and climb segments.The analysis for the rotation and climb seg-ments is unchanged in the case of seaplanes.The distance travelled on the water surface toaccelerate to the rotation speed (VR) is givenby:
STOW =1
2g
∫ VR
0
dV 2
a/g. (5)
Considering the sum of forces acting on thebody, the instantaneous acceleration at a ve-locity V is given by
a
g=
T
W− R
∆− ρV 2
2
CDo +CL
2
πAe− CL
R
∆W/S
(6)
where R/∆ is the hull’s resistance to load ratio,as determined for a velocity V and hull load∆ = W − 0.5ρV 2CLS.
To account for the effects of the aircraft’ssize and its aerodynamic and propulsive char-acteristics, 250 distinct, random aircraft weregenerated for each hull shape. The aircraftmaximum lift coefficient (CLmax), zero lift dragcoefficient (CDo), Oswald efficiency (e) and as-pect ratio (A) were chosen at random fromthe range of values seen in Table 1. Similarlythe number of engines (Ne) and mean aircraftthrust to weight ratio (T/W ) were randomlyset, with the available thrust assumed constantand equal to this mean value throughout thetakeoff manoeuvre. The choice of hull size, typ-ically expressed in terms of the hull maximumwidth or beam (B), wing loading and takeoffweight was constrained by the availability oftank test data.
Hydrodynamic test results are commonlypresented as plots of resistance (R) at the equi-librium trim angle versus velocity coefficient(CV ) for a range of aircraft beam loading coef-ficients (C∆), similar to Fig. 5. The use of nondimensional variables to relate the resistanceto velocity, weight and hull size is necessaryso that both geometric and dynamic similarityare maintained when using scale model data topredict the behaviour of a full size hull. The
Range Units
CLmax 1.8 - 2.8W/S 400 - 7800 Nm−2
T/W 0.2 - 0.6ρ 1.10 - 1.27 kg ·m−3
CDo 0.01 - 0.03A 5.0 - 12.0e 0.75 - 0.85
Neng 2 - 6C∆o 0.3 - 1.3β 10 - 30 deg.
L/B 4.5 - 10.8Lf/B 2.3 - 5.8
Table 1: Range of values used for aircraft char-acteristics in takeoff analysis
beam loading, given by
C∆ =∆
gρwB3=W − 0.5ρV 2CLS
gρwB3, (7)
gives the ratio of the hull load to its size. It is agood measure of the draught of the aircraft andtherefore the frictional resistance experiencedin the displacement regime (low speeds), whilealso indicating the level of hydrodynamic liftproduced and therefore lift induced resistancein the planing regime (higher speeds). The ve-locity coefficient, given by
CV =V√gB
(8)
is a variation of the Froude number, a dimen-sionless number used to represent the ratio ofinertial to gravitation forces, which also ensuressimilarity for the wave making characteristicsof a hull. Due to the size of the models and theneed to maintain CV and C∆ constant acrossscales, the Reynolds number could not be keptconstant, possibly leading to an over predictionof the frictional components of hydrodynamicresistance.
Based on the range of C∆ and CV for whichresistance data were available for each hull,a value for the aircraft beam loading at rest(C∆o) is chosen. A second point at a non-zerospeed coefficient and lower C∆ is then chosento represent the point of rotation and a meanvalue for the aircraft lift coefficient (CL), such
5

Figure 5: Trimmed Resistance to Weight(R/∆) ratio of the NACA 47 hull [4] for varyingspeed (CV ) and loads (C∆)
that
C∆ = C∆o
(1− ρgBCVR
2CL
2W/S
)(9)
CVR=
VR√gB
(10)
where VR is the velocity at which the aircraftrotates for takeoff. This is determined based onthe assumed aircraft CLmax and wing loadingby analysing the rotation and climb segments ofthe takeoff manoeuvre using the methods givenby Perry [5]. The aircraft beam and mean liftcoefficient can then be calculated using equa-tions (9) and (10).
Using a mean value for the lift coefficient isnot strictly accurate, as the actual aircraft trimangle and therefore CL will vary with velocitywhen taking off from water, with the aircraftoperating at substantially higher angles whentransitioning from the displacement to theplaning regime. This simplification however isnecessary as the majority of datasets availableassume a constant value of CL. Moreover theequilibrium trim angles given ignore the effectsof the moments imparted by the aircraft’saerodynamic surfaces and propulsive unitsand are therefore somewhat higher than wouldultimately be observed.
The simulation results were statisticallyanalysed to determine the hull shape parame-ters that most affected the takeoff performance
of the aircraft. In addition to the beam loadingat rest, the hull deadrise angle (β), representinghow deep the hull V-shape is, and hull lengthto beam ratio were found to best correlate withthe simulation results. Based on these observa-tions, a simple takeoff run distance predictionmodel (11) was produced, the coefficients forwhich can be found in table 2. The total take-off distance to a given obstacle height can befound by combining (11) with (12).
W/S
STOW= ρCLmax
[a1T
W+ a2
(T
W
)2
+a3Lf
B+
a4
cosβ+ a5C∆o + a6
]+ a7ρCDo + a8
(11)
STO =STOW +hOBS
tan
∣∣∣∣0.9 TW − 0.3√A
∣∣∣∣ (12)
a1 12.54183 a5 -0.10521a2 -6.77017 a6 -1.42082a3 0.08270 a7 -3.73432a4 -0.90283 a8 0.28393
Table 2: Constants for estimation of waterborne takeoff distance using eq. (11)
The simplified model behaves in a similarway to (3) but the mean resistance has beensubstituted by hull design parameters. Themodel agrees with past experience from tanktests, showing that a reduction in deadriseand beam loading or an increase in bodyfineness, represented by the ratio of the lengthof the body forward of the step (Lf ) to thebeam, will reduce hydrodynamic resistanceand therefore the takeoff run. A more unusualbehaviour is the quadratic nature of the thrustterm, showing that at high Thrust to Weightratios, increasing the available thrust has adiminishing impact on the takeoff distance.
From existing airworthiness directives it isnot clear if the accelerate/stop distance siz-ing requirement applies to water borne aircraft,however to account for cases where the seaplanelanding area has hard boundaries, such as wavebreakers, the balanced field length (BFL) of a
6

seaplane was also determined. This was donein the same way as for the AEO takeoff dis-tance, however at some velocity below the rota-tion speed a single engine failure was assumed.The velocity at which failure occurred was thenvaried until the distance required for the air-craft to come to a full stop and that requiredfor it to clear a 35ft obstacle were equal. For aworst case scenario to be designed for, the useof thrust reversal, spoilers and hydrodynamicbraking systems is not considered.
W/S
BFL= ρ
{CLmax
[b1T
W+ b2
(T
W
)2
+b3T̄
W
Ne − 1
Ne+ b4
Ne − 1
Ne
+b5L
B+
b6cosβ
+ b7Ne − 1
Ne C∆o+ b8
]+ b9CDo
}+ b10C∆o + b11
(13)
b1 7.15099 b7 0.10283b2 -5.49267 b8 -0.85773b3 3.07740 b9 -3.088908b4 0.07182 b10 0.76658b5 -0.04534 b11 -0.083248b6 -0.74138
Table 3: Constants for estimation of takeoffBalanced Field Length using eq. (13)
The BFL model (13) shows a reliance onthe common aerodynamic or propulsive designparameters similar to the surface distancerelation for normal takeoffs derived previously.The number of engines however now combineswith the available thrust to penalise the BFLfor the thrust lost following an engine failure.The effect of the hydrodynamic design of thehull shows some differences to the AEO takeoffdistance. The deadrise angle has the same ef-fect as for AEO but the beam loading and hullfineness, in this case best represented by thelength to beam ratio (L/B), show the reverseeffect. This is attributed to the assumptionthat the hull hydrodynamic resistance is theonly decelerating force applied to the aircraftin case of an aborted takeoff and thereforethe higher L/B and the lower C∆o are, thelower the hydrodynamic resistance will be,
substantially increasing the stop distance.
To validate the accuracy of the methodspresented, the reported takeoff performanceof existing seaplanes was compared to thatpredicted by equation (12). The geomet-ric, propulsive and aerodynamic characteristicsof the sample aircraft were approximated asclosely as possible based on reported specifi-cations, drawings and rough calculations. Asseen in table 4, equation (12) can predict thetakeoff distances to within ±12%, a reasonablemargin of error for an initial sizing methodol-ogy.
Validating the BFL model from a largenumber of sample aircraft was not possible,however the accelerate/stop distance for theCanadair CL-215 was estimated to be 1860 m,compared to a quoted distance of 1920 m [6],an underestimation of 3%.
The final constraint is the aircraft approachspeed and consequently its stall speed in thelanding configuration. For conventional airlin-ers the approach speed is usually around 130-140 kts to ensure the aircraft is travelling slowenough for the pilot to have adequate controland time to react during this critical flightphase, thus setting a maximum wing loadingconstraint.(
W
S
)max
=ρVappr
2CLmax
3.38(WL/Wo)max(14)
The design point is typically chosen such thatthe above constraints are met, while minimis-ing thrust to weight ratio and maximising wingloading, such that empty weight and drag canbe minimised. In the case of water-borne air-craft however, the takeoff and landing impactload factors that the fuselage must be designedto meet are proportional to the stall speedsquared, as per FAR-25.523 to 25.537. There-fore the hull structural weight penalty, assum-ing the maximum lift coefficient remains con-stant, is inversely proportional to the wingloading. This implies that when designingseaplanes, the maximum allowable stall speedshould be treated as an optimisation parame-ter, constrained by impact loading and control-lability considerations, and chosen such thatthe overall aircraft weight is minimised.
7

Reported Distance (m) Predicted Distance (m)Aircraft Run To hOBS = 50 ft Run From hOBS = 50 ft
Beriev Be-103 - 850 641 753Canadair CL-215 - 808 761 855Canadair CL-415MP - 814 832 909Gevers Genesis 305 - 343 437
Table 4: Comparison of predicted and reported takeoff distance for existing seaplane designs.
4 Preliminary Design Process
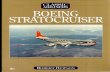
The complete aircraft sizing is carried outwithin an automated design environment, thelayout of which is seen in Fig. 6. The aircraftmaximum takeoff weight is obtained based ona user defined mission profile using the weightfraction method. The wing and engines aresubsequently sized using the methods detailedin section 3. A thermodynamic cycle analysisis carried out to design the engines and obtaintheir off-design performance.
The underside of the aircraft is generatedbased on user inputs for the hull shape and sea-wing width and the aircraft centreline length isestimated such that the submerged hull pro-vides 105% of the required buoyancy, keepingthe remaining wing section clear of the wa-ter surface. The passenger compartments areplaced above the static waterline and are sizedto accommodate the desired number of passen-gers in a single class configuration, while cargobays can be situated underneath or outboardof the passenger cabin. The cabin dimensionsand layout are dictated by the desired aircraftaerodynamic shape, however may be automat-ically modified, along with the predefined hullside height, beam loading and length to beamratio values if excessively thick airfoil sectionshave been generated in order to maintain a highenough sectional critical Mach number alongthe body and delay the onset of wave drag.Once miscellaneous components such as fins,engines, fuel tanks and control surfaces havebeen placed on the aircraft, the weight andbalance characteristics of the aircraft are es-timated using the empirical methodologies de-tailed by Roskam [7], modified to account forthe penalties of operating from water.
The planform and varied cross sectionalshapes encountered along the BWB’s span dic-tate the use of computational methods to pre-
dict the aircraft’s pressure loading. The Vor-tex Lattice Method is used as it offers a goodlevel of accuracy at a low computational ex-pense. Two dimensional airfoil characteristicsused for stall and some drag predictions are ob-tained from wind tunnel test data where possi-ble or a combination of empirical and 2D panelmethods using viscous-inviscid matching. Thepotential flow results are used to ensure thestatic margin lies within a user defined bound,by moving the outer wing section, and to checkthat the aircraft is laterally statically stable.The aircraft’s behaviour on the water when atrest is also checked by ensuring a sufficient hy-drostatic righting moment is generated whenthe aircraft is perturbed. Due to the range ofhull length to beam ratios used, the longitudi-nal stability of the hull at rest is always satis-factory, while the seawing width and dihedralangles are varied to ensure the aircraft equilib-rium roll (or loll) angle is below a maximumvalue set for passenger comfort and the outerwing section remains clear of water in roughseas.
The maximum takeoff weight and maximumlift coefficient are major design drivers, bothaffecting the size of the wing and therefore theaircraft. The entire sizing process is thereforerepeated until both values have converged, bas-ing the inputs for each initial sizing run on theresults of the previous iteration. Following con-vergence, the aircraft’s performance and han-dling qualities are evaluated based on the pre-viously obtained aerodynamic and propulsivecharacteristics. Water takeoff and landing dis-tances are evaluated using the simulation pro-cedure detailed in section 3, without the pre-viously stated assumptions regarding constantlift coefficient and thrust. The onset of por-poising, a dynamic pitch-heave oscillation oc-curring in the planning regime, is also checked
8

using empirical methods derived from a largecollection of tank tests.
!"#$%&'
!"(%()*'+(,("-'
./'
01"234-35
6'
/"-("3'+(,("-'
.("-78159'
-31:3%49';'
5(:3"&(1"&'
/"-("3<'=("<'
01"%41*'&$4=)03'
)"5'>(->'*(=%'
532(03'#*)03:3"%'
?$3*'%)"@'&(,("-'
)"5'#*)03:3"%'
/:#%9'.3(->%'
3&%(:)%(1"'
?("5'AB'*(:(%&'
/&%(:)%3'&%)%(0'
)(4814"3';'
C)%34814"3'&%)8(*(%9'
D(404)=%'
+%)%(0)**9'
+%)8*36'
E123'C("-'7'!"043)&3'
=("')43)'7'!"043)&3'
&3)C("-'C(5%>'
F#%(:(,3'C("-'
%C(&%'
B3%'"3C'
)(404)=%'&%)**'
)"5'54)-'
0>)4)0%34(&%(0&'
.1';'AG':)H'
01"234-35
6'
93&'
93&'
93&'
"1'
"1'
"1'
I9"):(0'
+%)8(*(%9';'
J34=14:)"03'
/H(%'
F$%#$%'K3&$*%&'
Figure 6: Layout of the design framework usedfor sizing BWB seaplanes
5 Observations from Sample Designs
The computational design framework de-scribed in section 4 has been used to generatea number of sample aircraft, presented in
table 5 and Fig. 7. These designs, intended forvarious passenger numbers and cruise ranges,have been roughly optimised by varying thewing planform, aspect ratio and length tobeam ratio. They demonstrate the flexibilityand scalability of the design framework andallow for certain observations on the potentialof seaplanes for airline operations to be made,although the performance of aircraft resultingfrom a more thorough optimisation is expectedto be superior to that seen here. All aircrafthave a design cruise speed of Mach 0.8 at35,000 ft and feature a 35 degree swept outerwing section and turbofan engines of bypassratio 8.
For all studies the minimum number ofengines was constrained to three in order forthe thrust to weight ratio necessary to meetthe BFL requirements, set at 2500m for thetwo smaller aircraft and 3500m for the rest, tobe minimised. The resulting thrust to weightratios varied between 0.32 and 0.37 and thetakeoff distance was determined to be themajor sizing constraint resulting on average ina 5% excess in thrust to weight ratio relative tothe remaining cruise and climb constraints. Allaircraft were found to be airworthy, exhibitinggood handling characteristics in both thelongitudinal and lateral modes. Takeoff andlanding distance constraints were consistentlymet and porpoising instabilities were notencountered.
The results indicate that the hull length tobeam ratio has a major impact on the designof the aircraft, affecting not only its runningcharacteristics on water but also the centrelinethickness to chord ratio and therefore drag riseMach number. For smaller aircraft, higher hulllength to beam ratios were found to performbest. For larger, long range aircraft hull fine-ness ratios in the range of 5 to 6.5 appear toblend very well with the rest of the aircraft.The exact value is largely dependent on thewing planform and the minimum centre sec-tion thickness required, as dictated by cabinand cargo packaging constraints. For example,when a second floor is added for the 850 pas-senger case, seen in Fig. 7(d), the optimumlength to beam ratio increases so that the wing
9

(a) 200 passengers, 5600 km range (b) 350 passengers, 13000 km range
(c) 550 passengers, 13000 km range (d) 850 passengers, 15000 km range
(e) 1200 passengers, 15000 km range (f) 2000 passengers, 15000 km range
Figure 7: Three-views of and isometric wireframe view illustrating the packaging of sampleaircraft.
10

Number of Range Length to Beam Max takeoff Energy consumptionPassengers (km) ratio L/B weight (N) (L/D)max (MJ/ASK)
200 5600 8.0 1,256,000 22.5 1.657350 13000 5.0 2,910,000 23 1.363550 13000 6.0 4,142,000 21.5 1.149850 15000 6.5 6,426,000 21 1.2391200 15000 5.5 7,965,000 24 1.0942000 15000 6.5 12,624,000 24 0.946
Table 5: Summary of design specifications and performance characteristics of sample aircraft
thickness to chord ratio remains less than 16%.
The fuel efficiency of the sample aircraft,given in table 5 as energy consumed per avail-able seat kilometre (ASK), is found to be pro-portional to the aircraft size, in line with ex-pectations. The estimated fuel efficiency ofthe smaller sample aircraft is found to fallsomewhat short of the fuel consumption fig-ures given for modern long range airliners byPeeters et al [8]. The ultra high capacity air-craft however seem to meet or exceed currentenergy efficiency levels of 1 - 1.1 MJ/ASK.
Although these results are not for optimisedaircraft, the fuel efficiency observed is ham-pered by a combination of persistent aerody-namic and weight related issues encountered.All sample aircraft show that the aerodynamicpenalty of shaping the hull for water-borne op-erations is minimised and that maximum liftto drag ratios between 21 and 24 are possi-ble. However the lower maximum wing loadingachievable by BWB aircraft means that at acruise altitude of 35,000 ft, the maximum L/Dwas typically observed at Mach 0.5. Further-more, due to the elevon deflection required totrim the aircraft and counter the nose-downpitching moments imparted by the high thrustline, the trimmed cruise L/D for most caseswas found to be in the range of 11 to 15.
A number of steps may be taken to improvethe aerodynamic performance of the aircraft.The use of a V-tail or canard would allow theuse of high lift devices, increasing the max-imum wing loading possible. Lowering thethrust line by using boundary layer ingestingengines, combined with the effects of a sta-biliser, should also result in a substantial re-duction in trim drag. A reduction of the designcruise speed or increase of the cruise altitude
should also serve to improve the aerodynamicperformance. Operating at a lower Mach num-ber would have the added benefit of allowingcontra-rotating open rotors to operate at nearmaximum efficiency, typically found betweenMach 0.7 and 0.8.
Another contributing factor to the relativelyreduced efficiency of the the sample aircraft isthe overall structural weight of the aircraft.Due to the lack of more accurate means ofpredicting the weight penalty resulting fromwater impact loads, a rather conservative60% weight penalty was applied to the hull,following suggestions by Raymer [9], undoubt-edly resulting in a large overestimation ofthe maximum takeoff weight and thereforealso fuel weight. Further work would see theincorporation of a structural design moduleinto the design synthesis to not only moreaccurately predict the weight of the hull butalso allow for the hull deadrise angle andaircraft approach speed to be optimised.
Reviewing the system packaging drawingsshown in Fig. 7, as aircraft size increases, thevolume available for storing fuel is found to beincreasing far in excess of that required. Thisunexpected feature of the proposed designsuggests that larger BWB seaplanes mayprove ideal for the use of hydrogen as a fuel,as this large excess volume may be used toaccommodate large volumes of hydrogen fuelstored at relatively low pressures. The aircraftcould therefore benefit from the reduction inemissions possible with the use of hydrogenwithout substantial weight penalties for itsstorage.
Overall these sample results show that the
11

proposed configuration as studied cannot yetcompete with the latest generation of airliners.However, it clearly has the potential to achievethat target, since substantial improvements infuel efficiency should be attainable with minormodifications to the aircraft design and missionprofile and following a broader optimisationstudy, as suggested above. The resulting air-craft performance characteristics were never-theless found to be far better than those of pastseaplane designs, suggesting that the proposedconfiguration could be easily used for niche mis-sions requiring water-borne operations, such aswater bombing or strategic airlift.
6 Conclusions
A radical approach to freeing large aircraftfrom ever more stringent noise constraints atairports was presented, suggesting that sea-planes could be a viable alternative for longrange passenger flights. A novel blended wingbody flying boat design intended to alleviatemany of the aerodynamic and weight penaltiesassociated with operating from the water sur-face, while maintaining good airworthiness andseaworthiness characteristics, was presented. Adesign framework intended for the rapid de-sign and evaluation of such aircraft has beenproduced and is briefly described. The initialsizing process for seaplanes was further dis-cussed and novel methods for the predictionof water-borne takeoff distances, using param-eters available in the initial design stage, werepresented. A family of sample aircraft designswere obtained and their performance was anal-ysed, showing that despite not currently beingcapable of achieving fuel efficiency levels on parwith current generation airliners, the proposed
design presents a clear improvement over pastseaplane designs and with the suggested mod-ifications it clearly has the potential to set an-other paradigm for future long-range travel.
References
1. Stinton D. Aero-marine design and fly-ing qualities of floatplanes and flying-boats,Aeronaut J, March 1987, pp. 97-127
2. Smith, A. G. and Allen, J. E. Water and airperformance of seaplane hulls as affected byfairing and fineness ratio, ARC R&M 2896,1954
3. Torenbeek E. Synthesis of Subsonic AirplaneDesign, Delft University Press, 1982
4. Ward K. E. Hydrodynamic tests in theN.A.C.A tank of a model of the Short Cal-cuta flying boat, NACA TN 590, 1937
5. Perry D. H. An analysis of some majorfactors involved in normal take-off perfor-mance, ARC Current Paper 1034, 1969
6. Canadair Ltd. Canadair CL-215 airplaneflight manual, Canadair Limited, 1986
7. Roskam, J. Airplane Design: Part V - Com-ponent Weight Estimation, DARcompora-tion, 2003
8. Peeters, P. M., Middel, J. and Hoolhorst,A. Fuel efficiency of commercial aircraft: anoverview of historical and future trends, Na-tional Aerospace Laboratory NLR-CR-205-669, 2005
9. Raymer, D. P. Aircraft Design: A Concep-tual Approach, AIAA, 1999
12
Related Documents