-
7/27/2019 Rov Current
1/10
Marine Technology, Vol. 45, No . 4, October 2008, pp. 241-249
On the Behavior of an Underwater Remotely Operated Vehicle in aUniform CurrentMing-Chung Fang,1 Jeng-Horng Chen,' Jhih-Hong Luo,l and Chang-Shang Houl
This paper presents a series of analyses on the behavior of an underwater remotely operated vehicle(ROV) with the umbilical cable in uniform current. The hydrodynamic mathematical model including thecoupled effect of the current and the umbilical cable is proposed here to deal with 6 degrees of freedommotions of the ROV. Because of the umbilical cable on the ROV, the present problem is the two-pointboundary value problem with respect to a set of first-order ordinary differential equation systems, which aresolved by applying the multistep shooting method. The corresponding hydrodynamic coefficients of theunderwater vehicle used in the hydrodynamic model are obtained by the planar motion mechanism (PMM)test technique. Three different current speeds are considered to investigate the current effect on the ROV'soperations including forward motion, ascending motion, and descending motion. Th e present results revealthat the current indeed significantly affects the operations of the ROV, and the mathematical numericalmodel developed here can serve as a useful tool to offer some valuable information for the anticurrent ROVdesign.Keywords: hydrodynamics (general); maneuvering; unmanned marine vehicles
1. IntroductionIN ORDER TO OBSERVE the underwater environment and ex-ecute complex technical work in the ocean, the underwaterremotely operated vehicle (ROV) is one of the necessary andimportant underwater technical systems that can achievesuch missions. Recently, the related researches and designsfor the ROV have been well made by many researchers. For
example, Deam and Given (1983) summarized the vast re-search on the ROV and proposed five steps to develop theROV. Nomoto and Hattori (1986) also made a detailed analy-sis on the performance of the deep-ocean ROV, JAMSTECDolphin 3K, whose main mission is to support the mannedsubmersible, Deep Ocean 2000, to investigate the operationallocation at the water depth 3,300 m. Their technical analyseswere also extended to the JAMSTEC Kaiko, and the maxi-mum operation depth could reach 11,000 m.Generally the deep-sea-operated vehicle systems typicallyconsist of a large support vessel, a winch, umbilical cable,and ROV. However, most of the numerical models for pre-dicting the motion of the ROV neglect the umbilical cable andcurrent effects because of complexity and difficulty. There-fore, only few authors deal with this kind of problem includ-ing the effects due to the umbilical cable and current. Ablowand Schechter (1983) proposed an implicit finite differencemethod to simulate an underwater cable, which has beenfrequently referenced in the relevant literatures. However,their algorithm will become singular if the tension in thecable is lost. Burgess (1992) indicated the internal forces gen-erated by the cable curvature could avoid the singular behav-ior of the implicit finite difference scheme, which was madeby implementing three additional rotational equations of mo-tion. Burgess (1994) also carried out several studies on the
' Department of Systems and Naval Mechatronic Engineering, Re-search Center of Ocean Environment and Engineering Technology,National Cheng Kung University, Tainan, Taiwan, Republic ofChina.Manuscript received at SNAME headquarters March 2007.
current effect on marine cable deployment. He found a significant variation in the current profile for different locationsand time. Banerjee (1995) developed an underwater cabledynamics model and a realistic control system that allowsdeployment, regulation, and retrieval of an unmanned underwater vehicle tethered to a ship. His algorithm can beused to answer many design questions related to the operation of ROV. Recently, Feng and Allen (2004) extended thenumerical scheme developed by Milinazzo et al. (1987) andpresented a finite difference method to evaluate the effects othe umbilical cable on an underwater flight vehicle, whichshowed that the numerical scheme is effective and provideda means for developing a feed-forward controller to compensate for the cable effects.As we know, most of ROVs are operated smoothly only inweak current, and few are designed with the anticurrent capability, which is an important function to the ROV in thespecial ocean circumstance. In order to offer enough information on the current effect to the design of anticurrent ROV, amathematical model including the coupled effects of the cableand current is necessary. Besides, the numerical techniquefor simulating the ROV maneuvering behavior is also important. The general nonlinear model for the dynamics of ROVcan be derived either using a Newtonian or a Lagrangianmethod (Coute & Serranl 1996, Fossen 1994). In order tounderstand the behavior of the underwater vehicle maneuvering in the ocean current, the mathematical model with theumbilical cable effect based on the formulas with 6 degrees ofreedom motions (Fossen 1994) is formulated here. The corresponding hydrodynamic coefficients about the maneuvering characteristics of the ROV are obtained by planar motionmechanism (PMM) test technique (Hou 2005). The corresponding two-point boundary-value problem with respect tothe umbilical cable connecting to the ROV is solved by themultistep shooting method, which based on the searchmethod developed by Hooke and Jeeves (1961). The compachydrodynamic model with 6 degrees of freedom motions andthe numerical solution technique are described in the following sections.
0025-3316/00/4504-024100.0010 MARINE TECHNOLOGY 24OCTOBER 2008
-
7/27/2019 Rov Current
2/10
2. Mathematical modelThe motions of the underwater vehicle are analyzed by twocoordinate systems shown in Fig. 1, that is, the inertial co-ordinate system O-XYZ and the body-fixed coordinate systemo-xyz. Three translation displacements, X (surge), Y (sway), Z(heave), and three Euler angles, roll (4), pitch (0), and ya w(ip), represent the position and attitude of the underwatervehicle with respect to the inertial frame, respectively. Th einstantaneous velocity and angular velocity with respect tobody-fixed frame are represented by (u, v, w) and (p, q, r),respectively. The velocities of the ROV can be solved by thefollowing 6 degrees of freedom equations of motions.
2.1. Surge(m - X6)11 + MZG4 - mYGP = --mp(yGq + zGr)"+(mxGq - mw + Z&w)q + (mxGr + mu - Y,,v)r"+ X. + X.I.lul)u - (W- B)sin0+ FT, + Fcx
2.2. Sway(m - Y,)& - =Gp + mXGr =p(myGq + mw - Zw)- mq(zGr + xGp) + (mYGr - mu -X,u)r+ (Y, + Y,1 1Ivj)v + (W - B)cos0sin4) + FT Y + Fcy
2.3. Heave(m - Z&)w + myGp - mxG =P(mZGP - mV + YOv)
"+q(mzGq + mu -X4u) - mr(xGp +YGq)"+ (Z4 + Zw1,,lwj)w + (W - B)cosOcos4) + FTz + Fc-2.4. Roll-mzGO + mYGW + (I - Kp)p -I -mu(yGq +zGr)
+ V(za'w - mYGp - mwX - w(mV - mzGp - YoV)+(I q+lp-Izr+NrN)q-(Iy.r+l,,p-lyq+ )r(K +K t1 1p])p + (y0 W-yBB)cosOcos4)- (ZGW- ZBW)Cos0sin(p + MT.+ M
(3)
(4)2.5. Pitch
mzri --nxGb - Iyp + (Iy - - I=r-u(mxGq - mw +ZwW) + mV(zGr +XGP) + w(XIu- mZG -mu) - (Iyq + -Ip + I.r + N,.r)p + (I.r+ lyzq- Ip +K.-p)r + (M q +Mq,qllql)q + (ZGW-ZB)sino - (XGW--xBB)cosOcosf + MTy +Mcy (5)2.6. Yaw
-myGd + mxG- - l,i. -I,A + (V-- Nr)'=-u(mxGr + mv - Y,v) - v(myrr - mu +Xau)+ mW(XG +YGq) + (Iyzr +Iyp - Iyq + Mlq)p- (I.r + I,q - IJp +K,p)q + (N,+N,Irllrl)r+ (XGW - xBB)cosOsinq) + (YGW - yBB)sin0+ MT, + MC, (6)The velocities of the ROV are assumed to be small, and
therefore some coupling terms are neglected in equations (1)
Fig. 1 The coordinate systems for underwater vehicle
to (6). m and I are the mass and related mass moment oinertia, respectively. The definitions of all hydrodynamic coefficients about the maneuvering characteristics and relatedvariables of the vehicle; that is, X6, Xu, Xu Iuj Yj, Y,p Y IvZ&,;,Zw, Z.wIK, Ki K, g_p, M. M, M_i i R- , N, Nrland so forth, are obtaineg y using the PAM test techniqu(Hou 2005). W and B are weight and buoyancy, respectivelywhereas (XG, YG, ZG ) and (XB, YB, ZB) are the center of gravitand the center of buoyancy, respectively. The variables (FTFTY, FT., MIx, MTy, MTZ) and (Fc, Fey, Fc,, Mc., Mcy, Mcare forces and moments du e to the thruster and the umbilicacable, respectively, and are described below.2.7. Force and moment on the ROV caused by thethruster
The ROV model (the Deep Ocean Triggerfish) considered i(1) the present study, is equipped with four thrusters as showin Figs. 2 and 3; that is, T1 and T2 are installed horizontalland are responsible for the forward motion, while T3 and Tare installed vertically with inclined angle OT to inducesideward, ascending, and descending motions. Assume (xd(2) Ydi zd)i- 1,2,34 is the center of the ith thruster, then the cor
-f + -4 X
yFig. 2 The top view scheme for the thruster arrangement
Y
ZFig. 3 The alter view scheme for the thruster arrangement
242 OCTOBER 2008
U.t)5601
1T4 0.136m
0.136m
MARINE TECHNOLOGY
-
7/27/2019 Rov Current
3/10
responding resultant force and moment induced by eachthruster can be obtained byFT=F7 + F J + FTZk
= (T1 + T2) i + (T3 - T4)cosOTj + (Ta + T 4)sinOT k (7)MT = MT.,i + MTyj + MTk= (Yc3 T3sinOT - Z,3 T3cOSOT +Y,4 T4sinOT+ z. 4 T4cos0T) i + (z:l T1 + z. 2 T2 - x,3 T3sinOT
- x, 4 T4 sin0T)j + (-Yj T1 - Y.2 T 2+ x.3 T3cosOT - xC4T4cosOT) k (8)where OT is set to be 45 deg in the present study. The rela-tionship between the thrust force and the revolution of thepropeller rps is obtained using the regression method andshown as below
T, -T2 = -0.0002 rps 4 + 0.4164 rps 2T3 = T 4 = -0.0015 rps 4 + 0.8027 rps2
(9)(10)
2.8. Force and moment on the ROV caused by th eumbilical cable including the current effectThe umbilical cable plays an important role in offering thepower supply and communication function between the ROVand the support vessel. However, the management and at-tachment of the cable and the drag relative to the current
cause some restrictions on maneuverability of the ROV.Therefore, the estimation of the corresponding effect causedby the umbilical cable and the current will be helpful whilewe are doing the analysis on the ROV's maneuvering behav-iors. However, most researchers neglect the effect of the um-bilical cable because of the complexity, especially includingthe current effect. In the present study, for simplifying theproblem, the following assumptions are made to solve thecorresponding configuration and tension of the umbilicalcable attached to the ROV:
"* The umbilical cable is inextensible"* The umbilical cable can only resist tension force, not forbending moment and compression force."* The hydrodynamic force on the umbilical cable can beresolved into tangential component and normal compo-nent.
The coordinate system for analyzing the umbilical cable isshown in Fig. 4. The Y-axis is assumed to coincide withthe X-axis. The origin o coincides with the end point of theumbilical cable. 0 is the angle between YTo plane and theplane which includes the tangential line passing through thepoint A and perpendicular to YC y plane. is the angle be-tween the tangential line passing through the point A andYoy plane. i., i0 , and iP are the unit vector along the cablelength s, 0, and T, respectively, and perpendicular to eachother. Both i. and i, are located on the vertical plane.Considering the configuration of the umbilical cable andthe equilibrium state of the external force on the cable, wecan obtain the following linear differential equations
S= cosqx cosO (11)dy-S= cos7 x sino (12)
dT-i= w sing - R ( 4
45i(P
0
Fig. 4 The coordinate for the umbilical cable
do R,ds T cos7d- (-Rp + w cos-)ds T
(15
(16where s is the arc length from the origin to the point A on thcable. T is the tension force along the cable. w is the cablweight per unit length in the water. R., Re, and R. are thforces per unit length due to the current in i., i0 , and idirections, respectively, and defined as:
1R, = 2 pt7TCfV2 cosVlcosl (17
(18
(1in which
R -y ptC.V 2 sin I inTh sin( 2, cosy(20(21
MARINE TECHNOLOGY 24OCTOBER 2008
-
7/27/2019 Rov Current
4/10
R = 1 ptC.V2 sintpsintIsin . siny (22)where p is the water density, t is the diameter of the cable, C, 'is the normal drag coefficient, Cf is the tangential drag coef-ficient, V is current velocity relative to the cable, is theangle between current and cable, y is the angle between :oyplane and the plane composed of i8 direction and currentdirection. The direction of the current is assumed to be coin-cident with the X-axis.Applying the fourth Runge Kutta numerical method to theequations (11) to (16), we can solve the tension force T on thecable and the related plane angles, D and V. Then the com-ponents of the tension force and moment, that is, (Fc, Fay,Fc, Mc, Mc, Mcz), with respect to body-fixed system can beobtained by the coordinate transformation.The current force effect on ROV can be considered by usingthe relative velocity vr to replace the ROV velocity v in theequations of motions, that is, vr = v - v,, where v, is thecurrent velocity.Besides, the underwater length of the umbilical cable con-sidered here is assumed to be released from a winch drumwith feed-forward controller, and therefore the cable lengthwill change with the ROV motions. The releasing model ofthe cable can be referred to Feng and Allen (2004).Because the equations (11) to (16) are a set of first-orderordinary differential equation system with the two-pointboundary-value problem, it is rather difficult to solve thesolution. Here, based on the direct search method (Hooke &Jeeves 1961), a multistep shooting method is applied to solvethis problem:
(1) Select the connected point between the umbilical cableand the ROV as the start point and assign its initialvalue of (T, D,V) and the multistep intervals of AT, AD ,AV for each variable.(2) Calculate the function values of the other end point ofthe cable at free surface near the support ship, i.e.,(.,,,), with respect to an initial decreasing or increas-ing step interval, i.e., (T AT, "1,V), (T, "0 A-0, V) , (T,0, V A4), and compare with those obtained from thevalues of (T, -0, V). Then select the better one whosevalue is closer to the exact coordinate of the object pointas the new base point, for example, (T, D + AD, V).(3) Restart the new base point selected at Step (2), movefurther step intervals to calculate another function val-ues of objective points, i.e., (T AT, D + A0, V), (T, D +A-D A6, V), (T, D+ A0, V AV), and again compare withthe base point (T, D+ A0, V) to track the better one asthe next new base point, for example, (T, D + AD , V -AV).(4) Repeat the Step (3) with the further step intervals foreach variable and track the better one until the func-tion values of variables with respect to all possible in-crements and decrements are tested.(5) If the above local shooting is invalid, then reduce thestep interval to half, i.e., (AT.,W = (AT/2), AD0,, =(AD/2), AV... = (AV/2)), and repeat the above similarlocal shooting procedure.(6) Repeat the Step (5) until the errors of the ith step in-tervals are sufficiently small or equal the allowableerror limit, i.e., ATi -
-
7/27/2019 Rov Current
5/10
"o (N)'100F. 200-300.400 0 10 20 30 40 50200 (N)
-2o r~rVN~tNr\0 10 20 30 40 5020 (N.M)
o 1o 20 30 40. 50tlime(sec)
Fig. 7 The force and moment of the cable on the ROV doing forward motion inuniform current with 0.1 n/sec (T1 = T2 = 24 rps, 73 = T4 = 0)
2025 1 - - - r -0 10 20 30 40 501.o Surge(i/s)
U 0.5 ,1, 1 1 1 11--0.5
0 10 20 30 40 500.5W 0.0 V.-0580 Iic(dg 20 30 40 50
400 o-400 10 20 30 40 50fimc(scc)
Fig.8 The simulation of the RO V doing forward motion in uniform current with 0.5in/sec (T1 = T2 = 24 rps, T3 = "4 = 0)
0 ' I I- II I I10 V.S 0sec- -t40 . ecN
340-140 -120 -100 -80 -60 -40 -20 0 20X(m)
Fig. 9 Th e trajectory of the ROV doing forward motion inuniform current with 0.5m/sec (TI = 72 = 24 rps, T3 = T4 = 0)
-8 (N-240 0 10 20 30 40150 (N)
0 10 20 30 401i (N.M)
0 10 20 30 40fime(scc)
Fig. 10 The force and moment of the cable on the RO V doing forward motion iuniform current with 0.5 m/sec (T , = T2 = 24 rps, T3 = 74 = 0)
152025o
0 10 20 30 40 50.5U 0.0-0.5.1.0 10 20 30 40 5
0.0-0.5-1.080 p 10 20 30 40400o-40 /0 10 20 30 40 5tlime(sec)
Fig. 11 The simulation of the RO V doing forward motion in uniform current wit1.0 mnsec (T 1 = T2 = 24 rps, T3 = T4 = 0)
-140 -120 -100 -80 -60 -40 -20 0 2X(m)Fig. 12 The trajectory of the RO V doing forward motion in uniform current wit1.0 m/sec (TI = T2 = 24 rps, T3 = T4 = 0)
pitch angle 0 also regularly oscillate. It means that the ROV o (N)will move forward up and down with varied pitch angle as we 0 N)can see from the trajectory simulation shown in Fig. 6, which F, 2 or.. V0 V i V V/V V V Valso shows the ROV gradually ascends with the increasing 300umbilical cable length while the RO V is moving forward. The 200 (N) 10 20 30 40 5corresponding phenomena can be ascribed to the effects of tthe coupled effect of cable and current. The force and moment F.. 0of the umbilical cable including the current effect are shown -200 10 20 30 40 5in Fig. 7 for reference. The oscillatory surge force Fc causes 20 (N-M)the oscillatory surge speed, while the oscillatory -heave force 10F. and pitch moment M_ cause the oscillatory heave and Y o Lpitch motions, respectively. However even the motion is os- -Oo , 2 3 4cillatory and the cable surge forceF, is mostly negative, the time(sec)RO V still move forward for about 15 m in 50 sec because the Fig. 13 Th e force an d moment of the cable on the ROV doing forward motion icurrent speed is only 0.1 m/s and thrust force is large enough. , uniform current with 1.0 m/sec (T, = T2 = 24 rps, T3 = T4 = 0)The results in Fig. 7 also reveal that the heave force F_ is onaverage negative, that is, upward, and consequently leads toupward heave velocity; therefore, the ROV has the tendency motion behavior of the ROV, the results for the stronger curto ascend. rent with 0.5 and 1.0 ra/s are also shown in Figs. 8 to 10 andIn order to investigate the effect of the current speed on the Figs. 11 to 13, respectively. After comparing with the resultOCTOBER 2008 MARINE TECHNOLOGY 24
-
7/27/2019 Rov Current
6/10
20
0 10 20 30 40 5
0 10 20 30 40 50u1.00.-0.0-100 10 2030 40 50
1206O0h*
-60-100 10 20 3040$
limc(scc)Fig. 14 The simulation of the ROV doing forward motion in calm water (T1 = T2= 24 rps, T3 = T4 = 0)
60O heaveE3 pitch
E356 1- -......- - ------------- I
"a 52"48
I-- -- - - - ------------------ I.
_ _ _ _ - -...... L . ..--------- 10.48----- ------ -- -- L...........................-
40) U.Ut0 0.5current (m/s)Fig. 15 The amplitude of steady heave and pitch motions at different current(ROV forward motion, T, T2 = 24 rps, T3 = T4 = 0)
2052:N-0
00 0 su-rSc(nVI.s)
Ul .-1.5
0,,-_.5
-I0'080
040
0
10
10
20
20
20
20
0
10 fime(sec)FIg. 16 The simulation of the RO V with commanded ascent resulting in descend-
ing motion in uniform current with 0.5 rn/sec (Tr = T2 = 0, T. = T4 = -5 rps)
in Figs. 5 to 7, we can see that the effects are generallysimilar except the forward distance. From the trajectory re-sults, we find that the forward distance decreases while cur-rent speed increases, and the present ROV seems to stay andoscillates up and down around at the original position up toa current speed of 1.0 ni/s. It means that the present ROVmodel can only resist the current up to 1.0 m/s under thepresent thrust power.
0.60
n rK
010
Nj203040-140 -120 -100 -80 -60 -40 -2UX(m) U 2
Fig. 17 The trajectory of the ROV with commanded ascent resulting in descending motion in uniform current with 0.5 m/sec (7T= T2 = 0, T3 = T4 = -5 rps)
0 IN)
.200 0 10o (N)
-1000 1010 (N-M)M,, 0
-100 10
20
20
20
3
3
time(sec)Fig. 18 The force and moment of the cable on the RO V with commanded ascen
0.52 resulting in descending motion in uniform current with 0.5 m/sec (TI = T2 = 0, T= T4 = -5 rps)'3-'3
If the ROV moves forward without current, the heave anpitch motion are also oscillated due to the cable effect ashown in Fig. 14 . Based on the steady-state results of forwarmotion simulation, the amplitudes of heave and pitch motions at different current speed are also shown in Fig. 15 foreference. The results reveal that the heave and pitch motions generally become larger with current effect except current with 0.1 m/s. It is also interesting to see that heave anpitch motions have similar tendency with respect to the current speed.3.2. Ascending motion
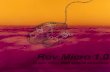
Because the small current does not affect the ROV motiosignificantly, here we only consider cases with stronger current speed, that is, 0.5 and 1.0 m/s. Figures 16 to 18 are thresults for the ROV doing the pure ascending motion in unform current with 0.5 m/s, and the thrusters T, and T4 are seto be -5 rps, that is, total thrust/weight = 0.084, while Tand T2 are set to be 0. From Fig. 16 , it is interesting to finthat the ROV descends instead of ascends, which means thmotion of the ROV is significantly affected by the current ancable. Although the heave velocity is upward with respect tthe body-fixed coordinate, the positive pitch moment makethe ROV bow up and the negative surge force makes the ROVmove backward with respect to the body-fixed coordinateConsequently, the resultant velocity makes the ROV descenas shown in Fig. 17 . Therefore, it cannot achieve the ascending mission under the present operation and another operation must be considered in order to solve this problem. Sincthe ROV moves backward and bows up, we need to afforsome forward power to resist the current effect to increasthe forward speed of the ROV. Here we adjust Ti and T2 to 1rps, that is, total thrust/weight = 0.37, and recalculate thresults as shown in Figs. 19 to 21. The results show that thascending motion is indeed improved by adding the forwarthrust. The pitch angle is negative and small, and the foward surge velocity incorporating with the upward heav
246 OCTOBER 2008 MARINE TECHNOLOG
. .............. . . . . . . . . . . . . .. . ...-.-
t=Osect=lIOsec Iirrent 1
,t=20se , -
I
I
I )
current
I
-
7/27/2019 Rov Current
7/10
25 -0 10 20 30
U0 10 20 300.0- hcavc(trvs)
-0.30 10 20 30
10 pitch(g)00
0 10 20 30timc(sec)Fig. 19 The simulation of the RO V doing ascending motion in uniform currentwith 0.5 m/sec (T I = T2 = 15 rps, T3 = T4 = -5 rps)
2150 10 20 3
0.8 Surge0(m/s)U 0.0
-0.8 0 10 20 30.6 hc3avcnVs)0.0W.0.6
-1.20 10 20 3,Do0- pitch(deg)-50
0 10 20 3time(sec)Fig. 22 The simulation of the RO V doing ascending motion in uniform curren
with 1.0 m/sec (T, = T2 = 24 rps, T3 = T4 = -5 rps)
N,F"f2030t-Osc0 ' tt=l0sec . , - ,40-140 -120 -100 -80 -60 -40 -20 0 20
X(m)Fig. 20 The trajectory of the RO V doing ascending motion in uniform current with
0.5 m/sec (T, = T2 = 15 rps, T3 = T4 = -5 rps)_7o- (N)F-so-90 '0 10 20 3020 (N)
F. 0
5 (N-M)M,4
3 0
10
10
20
20timc(sCc)Fig. 21 The force and moment of the cable on the RO V doing ascending motion
in uniform current with 0.5 m/sec (TI = T2 = 15 rps, T3 = T4 = -5 rps)
velocity make the ROV ascend well as shown in Fig. 20. Thesimilar discussion can be applied to the case in the strongercurrent with 1.0 m/s as shown in Figs. 22 to 24, in which thelarger forward thrust are also needed; that is, TL and T2 areadjusted to 24 rps with total thrust/weight = 0.768. In thiscase, although the motions are significantly oscillatory espe-cially for the pitch motion, the ascending mission of the ROVcan still be achieved.3.3. Descending motionFrom the above results, we understand that the forwardthrust is important to make the ROV maintain the suitableattitude to execute the ascending mission in uniform current.Therefore, it is concluded that it might need the same treat-ment for the descending mission. Here the same operation asthat for ascending motion is firstly applied, that is, Ta and T4are set to be 5 rps with total thrust/weight = 0.084, while T,and T2 are set to be 15 rps with total thrust/weight = 0.37,for the current with 0.5 mis. The simulations are shown inFigs. 25 to 27. Although the results show that the descendingmission is successful, the descending depth is small, that is,
-20
40'-140 -120 -100 -80 -60 -40 -20 0 20X(m)Fig. 23 The trajectory of the RO V doing ascending motion In uniform current with
1.0 n/sec (T1 T2 = 24 rps, T3 = T4 = -5 rps)
0 (N)F-100"-200
-300 0 10 20 3200 (N)F_,
-2000 10 20 320 (N-M)M, 10,S
10 20 3Zime(sec)Fig. 24 The force and moment of the cable on the RO V doing ascending motion
in uniform current with 1.0 m/sec (T, = T2 = 24 rps, T3= T4 = -5 rps)
-~24.
-2526 0 10 20 3
U
010 20 30.2 he3vc(ms)0.10.0-0.10 10 20 330 pitch(dCg)
-35 10 20 3time(Sec)Fig. 25 The simulation of the RO V doing descending motion in uniform curren
with 0.5 m/sec (TI = T2 = 15 rps, T3 = T4 = 5 rps)
MARINE TECHNOLOGY 247
'oo
- OCTOBER 2008
-
7/27/2019 Rov Current
8/10
40 L-140 -120 -100 -80 -60 -40 -20X(m)
Fig. 26 The trajectory of the RO V doing descending motion in uniform currentwith 0.5 m/sec (T1 = T2 = 15 rps, T3 = T4 = 5 rps)
.70 (N)F,. -so
.90 0 10 20 3025 (N)F 0
"-25.500 I0 20 305 (N-M)
0 10 20 30time(Sec)Fig. 27 The force and moment of the cable on the ROV doing descending motion
in uniform current with 0.5 m/sec (T, = T2 = 15 rps, Ta = T4 = 5 rps)24F 26. 2830 ; '
02U 0.10.0-0.1 00.34 hmw(/s)030.100 040 pitch(deg)020
00
In
10
I0
20
20
20time(scc)Fig. 28 The simulation of the RO V doing descending motion in uniform current
with 0.5 m/sec (T1 = T2 = 15 rps, Ta = T 4 = 10 rps)
about 0.8 m in 30 sec. It ascribes to the small resultant down-ward velocity that includes the effects of heave velocity,surge velocity, and pitch angle. This fact also indicates thatthe downward thrust may be too small; therefore, we adjustT3 and T4 to 10 rps, that is, total thrust/weight = 0.29, andrecalculate the results as shown in Figs. 28 to 30. From thenew results, we find that the descending performance is im-proved and the descending depth increases about 4 m. In thiscase, heave velocity, surge velocity, and pitch angle finallyreach a steadily constant value and so do the cable forces onthe ROV, see Figs. 28 and 30. The trajectory is shown in Fig.29, and we can see the ROV descends with a constant positivepitch angle after running about 3 sec referring to Fig. 28.Considering the stronger current with 1.0 m/s, we first set5 rps for the thrusters T3 and T4 , and 24 rps for thrusters T,and T2 The simulation results are shown in Figs. 31 to 33. Itis again interesting to find that the ROV is ascending insteadof descending, that is, Figs. 31 and 32, which means that thedownward thrust force may be too small and consequentlythe resultant velocity due to the heave velocity and surge
100 00-0-N t-10sec t-Oscc_20 - _ -
300 20 40 c-140 -120 -100 -80 -60 -40 -20X(m) 0 2
Fig. 29 The trajectory of the RO V doing descending motion in uniform currenwith 0.5 m/sec (T, = T, = 15 rps, Ta = T4 =10 rps)
(N)F..
1000 10 200 (N).20-40-600 10 205 N-MI)4K, 3-2
I0 time(sec) 20
Fig. 30 The force and moment of the cable on the RO V doing descending motioin uniform current with 0.5 m/sec (T1 = T2 = 15 rps, T. = T4 = 10 rps)
22,a24
26 0 10 200.7 we/sU 0.0
-0.7 0 10 2006 h"w,mls)
0 t0 2060 .pitch(deg)0 0
-60 -0 10 20time(sec)Fig. 31 The simulation of the RO V with commanded descent resulting in ascending motion in uniform current with 1.0 m/sec (T1 = T2 = 24 rps, T3 = T4 = 5 rps
-140 -120 -100 -80 -60 -40 -20 0 2X(m)Fig. 32 The trajectory of the ROV with commanded descent resulting in ascening motion in uniform current with 1.0 m/sec (T1 = T2 = 24 rps, Ta = T4 = 5 rp
velocity is upward. Therefore, a new operation must be applied. Here we again adjust T, and T4 to 10 rps, and it indeeworks as we find in Figs. 34 to 36. From Fig. 34, we can sethe ROV descends about 3.3 m, although there is some oscilatory disturbance caused by the coupled oscillatory surgeheave, and pitch motions. That means the thrust poweadded is sufficient to induce a downward velocity and consequently makes the ROV descend.MARINE TECHNOLOG
! ~I
'0
30
248 OCTOBER 2008
F,,
-
7/27/2019 Rov Current
9/10
oF (N)o01200-3-0
0 10 20 30200 (N)100
0 10 20 3015 (N-M)10Ms0.
0 10 20
100 (N)
-00O0 10 20 3100 (N)-100-200 ''"00 20 3
15 l(N-M)
0 2030 0
tlim(sec)Fig. 33 The force and moment of the cable on the RO V with commanded de-scent resulting in ascending motion in uniform current with 1.0 m/sec (T1 = T2 = 24rps, T3 = T4 = 5 rps)
2 428 10.80 srcns 10 20 30
U . -srems.01-0.8 ..
0 10 20 Ju0.6 heave(nl/s)W 0.'0
-0.6 t:0 10 20 30So pitch(dg)
timc(sec)Fig. 34 The simulation of the RO V doing descending motion in uniform currentwith 1.0 m/sec (T1 = T2 = 24 rps, T3 = T 4 = 10 rps)
current10
N t-Os(
3040-140 -120 -100 -80 -60X(m)
Fig. 35 Th e trajectory of the ROV doing descenwith 1.0 n/sec (T1 = T2 = 24 rps, T
4. ConclusiorIn the paper, a series of analyses fchaviors of the ROV including forwardtion, and descending motion in unifoinvestigated. Based on that, the follovdrawn:
When the ROV is operated to do theform current, it moves not only forgradually. The upward movement itheave force from the umbilical cabl
When operating the ascending motiowe must offer not only enough upalso some suitable forward thrustrent effect. The similar conclusioncase for descending motion.
The attitude of the ROV varied withcurrent, which also seriously affec
time(sec)Fig. 36 The force and moment of the cable on the RO V doing descending motio
in uniform current with 1.0 m/sec (T1 = T2 = 24 rps, T3 = T4 = 10 rps)
ROV. However, the present ftudy finds that the suitablethruster adjustment may improve the attitude of the ROVand make the operation smoother.The effect of the current force on the umbilical cable wilsimultaneously affect ROV motions because the umbilicacable is connected to the ROV. Conclusively, both umbilicacable and ocean current indeed affect the motion behaviorof the ROV significantly and must be paid careful attentionThe strong current is a troublesome problem for the ROV'operation in the ocean. Based on the numerical model developed in the paper, we may offer some valuable information to the anticurrent technique for the operation othe ROV.
AcknowledgmentsThe authors wish to thank the National Science CounciRepublic of China, for their financial support under GranNo. NSC 93-2611-EO06-016. Thanks are also extended to thMinistry of Education of ROC for supporting the NCKU
NSYSU Research Center of Ocean Environment and Engneering Technology which offers a lot of help including thfinancial support and necessary facilities.References
4120 5 t 5SOc ABLow, 0. M., AN D SCHECHTER, S. 1983 Numerical simulation of under se. I cable dynamics, OceanEngineering,10, 6, 443-457.-40 -20 0 20 BANERJEE, A. K. 1995 Deployment control of a cable connecting a shipan underwater vehicle, Applied Mathematics and Computation, 797-116.ding motion in uniform current BURGESS, J. J. 1992 Equations of motion of a submerged cable with ben= T 4 = 10 rps) ing stiffness, OffshoreMarineand ArcticEngineering, -A, 283-289BURGESS, J. J. 1994 The deployment of an undersea cable systemsheared current, Proceedings,BOSS'94, Seventh International Confeis ence on the Behaviour of Offshore Structures, July, Massachusetts, p327-334.r the maneuvering be- CourE, G., AND SERRANL, A. 1996 Molding and simulation of underwatemotion, ascending mo- vehicles, Proceedings,Fourth IEEE CCA, Dearborn, MI.DEAM, W. , AND GIVEN, D. 1983 RO V technology trend and forecasirm current have been Oceans, 15, 573-578.ving conclusions can be FENG, Z., AND ALLEN, R. 2004 Evaluation of the effects of the communcation cable on the dynamics of an underwater flight vehicle, Ocea
Engineering,31, 1019-1035.forward motion in uni- FossEN, T. I. 1994 GuidanceandControlofOceanVehicles, John WileySons, Chichester..ward but also upward HooKE, R., AND JEEVES, T. A. 1961 Direct search solution of numerical ans caused by the upward statistical problems, Journalof the Association or ComputingMachie. ery, 8, 212-229.on in stronger current, Hou, C. S. 2005 The Effects of the UmbilicalCable and Current on thMotion of the UnderwaterRemotely OperatedVehicle, Master thesvard thrust power, but National Cheng Hung University, Taiwan, ROC.?ower to resist the cur- MILINAzZo, F., WILME, M., AND LATCHmAN, S. A. 1987 An efficient algcan be applied to the rithm for dynamics of towed cable systems, OceanEngineering,14,S513-526.
NOMOTO, M., AND HATrOu, M. 1986 A deep RO V DOPHIN 3IK designethe appearance of the performance analysis, IEEE Journalof OceanicEngineering, 11, (ts the operation of the 373-391.
MARINE TECHNOLOGY 2
20 30
0 10 20
OCTOBER 2008
-
7/27/2019 Rov Current
10/10
COPYRIGHT INFORMATION
TITLE: On the Behavior of an Underwater Remotely Operated
Vehicle in a Uniform Current
SOURCE: Mar Technol SNAME News 45 no4 O 2008
The magazine publisher is the copyright holder of this article and it
is reproduced with permission. Further reproduction of this article in
violation of the copyright is prohibited. To contact the publisher:
http://www.sname.org/