Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical Robotics December 17, 2014 1 / 31

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Practical Robotics (PRAC)A Mobile Robot Navigation System
(1) - Sensor and Kinematic Modelling
Nick Pears
University of York, Department of Computer Science
December 17, 2014
nep (UoY CS) PRAC Practical Robotics December 17, 2014 1 / 31

Practical Robotics (PRAC): Module outline- first half, Nick Pears and Alan Millard (labs)
Lecture 1: A Mobile Robot Navigation System (1) - Sensor andKinematic Modelling (Nick Pears, week 2)
Lab 1a (week 2): Calibrating and characterising IR range sensors.Lab 1b (week 3): Calibrating and characterising the odometry system.
Lecture 2: A Mobile Robot Navigation System (2) - Steering Controland Integrated Navigation System (Nick Pears, week 3)
Lab 2a (week 4): A steering control system for wall following.Lab 2b (week 5): An integrated robot navigation system (timepermitting!)
nep (UoY CS) PRAC Practical Robotics December 17, 2014 2 / 31
Practical Robotics (PRAC): Module Outline- second half, Alan Millard and Adrian Bors
Lecture 3 (Alan Millard, week 4): ROS and SLAM.
Lab 3a (week 6): The Robot Operating System (ROS)Lab 3b (week 7): Swarm PI robot lab ALab 3c (week 8): Swarm PI robot lab B
Lecture 4 (Adrian Bors, week 5): Computer Vision (CV) for MobileRobots (Optical Flow).
Lab 4a (week 9): CV lab ALab 4b (week 10): CV lab B
nep (UoY CS) PRAC Practical Robotics December 17, 2014 3 / 31
Outline of this lecture
The first part of this lecture will overview modelling in general and thendiscuss the kinematic modelling on the Pololu m3pi robot.
1 An overview of modelling in robotics.
2 Kinematic modelling of the robot.
The second part of this lecture will look at each of the two main sensorsystems that we will use
1 Calibrating, characterising and using the IR distance sensors in thenavigation system (extereoceptive sensors).
2 Calibrating, characterising and using the odometry sensors in thenavigation system (proprioceptive sensors).
nep (UoY CS) PRAC Practical Robotics December 17, 2014 4 / 31

Lecture 1, part 1: What is robot modelling?
1 Kinematics modelling: mathematical representation of (i) thegeometric layout of sensors and actuators, and the overall physicalrobot structure connecting these together and (ii) movement of therobot across all possible degrees of freedom.
2 Dynamics modelling: mathematical representation of how drivingforces and torques in robot’s actuators result in robot motion; again,over all possible degrees of freedom.
3 Sensor modelling: mathematical representation of the operation andcharacteristics of the robot’s sensors.
4 Environment modelling: mathematical representation of theenvironment that the robot(s) operate in.
5 Multi-agent modelling: mathematical representation of other robotsand other dynamic agents (eg. humans, pets).
nep (UoY CS) PRAC Practical Robotics December 17, 2014 5 / 31

Why do we model? (1)
If we model everything (robot, environment, other agents), we have arobot simulation. In terms of research: cheaper, easier, unsupervised,and (with enough compute power) possible to run faster thanreal-time, which is important for certain types of highly iterativealgorithms (eg genetic algorithms).
Beware of the gap between simulation and reality, due to unmodelledeffects and inaccuracies in modelling: the reality gap.
Modelling of the robot’s kinematics and dynamics allows us to designcontrol systems for smooth, efficient, accurate robot motion andactions (real or simulated).
Often, direct manual measurement of model parameters to sufficientaccuracy is difficult, and hence some form of model calibrationprocedures are required.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 6 / 31
Why do we model? (2)
Sensor modelling allows us to characterise the behaviour of a sensorsystem, including operating range and measurement uncertainties dueto various types of noise.
Again, sensor parameters usually need to be determined by acalibration procedure.
If calibration is possible through the normal operation of the robot, itis often called self calibration (eg cross referencing across severalsensor systems).
One aspect of autonomy is for a robot to learn its own models, atleast parameters, sometimes even the overall model structure.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 7 / 31
Why do we model? (3)
Environment modelling is essential for the autonomy of mobileplatforms, as witnessed by the mapping aspect of SLAM algorithms(Simultaneous Localisation and Mapping).
For a robot to behave intelligently in a space shared with multipleagents (other robots and humans), the robot must have a means ofpredicting the effect of its own behaviour within a dynamicenvironment, which may rapidly change over time, thereforemulti-agent modelling is necessary.
Look-ahead simulation can be used to implement short-term tacticalbehaviours.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 8 / 31
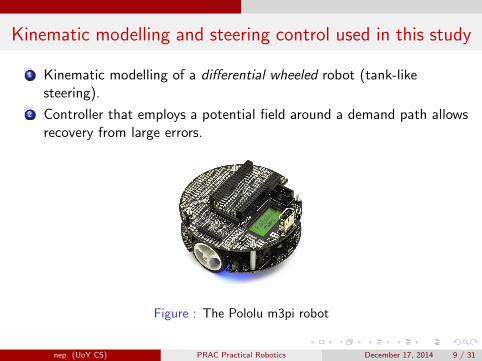
Kinematic modelling and steering control used in this study
1 Kinematic modelling of a differential wheeled robot (tank-likesteering).
2 Controller that employs a potential field around a demand path allowsrecovery from large errors.
Figure : The Pololu m3pi robot
nep (UoY CS) PRAC Practical Robotics December 17, 2014 9 / 31

The robot frame and kinematic model parameters
Differential drive is very simple to implement and three wheels do notrequire a suspension system.Kinematic model parameters: let a be the radius of the drive wheelsand b be the wheelbase. i.e the distance between the wheels.Note also that there are potentially 4x3 sensor position parameters(discussed later).
xR
θR
b
ωR
ωL
yx s θs( )s, ,
distance sensorInfra red − sensor coordinates
in robot centred frame
a, drive wheel radius
, wheelbase
R R R
yR
Figure : The robot frame and kinematic parameters
nep (UoY CS) PRAC Practical Robotics December 17, 2014 10 / 31

The robot frame and kinematic model parameters
1 Origin of the robot’s coordinate system can be anywhere, naturalchoice is the midpoint of the drive wheels - why?
2 Note that the superscript R indicates a robot centred coorinate frame.3 In this navigation system, there are three different coordinate frames:
R - the robot centred frame (one frame).L - a local frame describing robot position relative to the start of somestraight line path segment (nseg frames for nseg path segments).G - a global frame in which to describe path segments, targets (walls),and accumulated position via odometry (one frame).
4 Make sure you use the correct frame and know how to switchbetween frames using a rigid Euclidean transformation (rotation and2D translation, reviewed later).
nep (UoY CS) PRAC Practical Robotics December 17, 2014 11 / 31
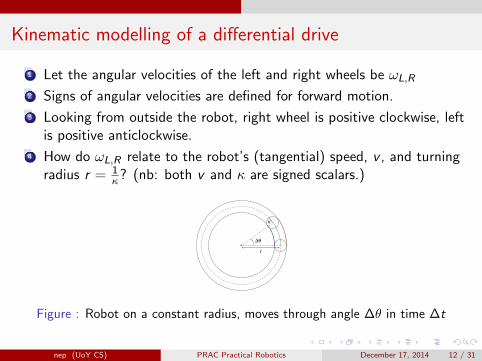
Kinematic modelling of a differential drive
1 Let the angular velocities of the left and right wheels be ωL,R
2 Signs of angular velocities are defined for forward motion.
3 Looking from outside the robot, right wheel is positive clockwise, leftis positive anticlockwise.
4 How do ωL,R relate to the robot’s (tangential) speed, v , and turningradius r = 1
κ? (nb: both v and κ are signed scalars.)
∆θ
r
v
Figure : Robot on a constant radius, moves through angle ∆θ in time ∆t
nep (UoY CS) PRAC Practical Robotics December 17, 2014 12 / 31

Kinematic modelling of a differential drive
(r − b
2)∆θ = aωL∆t (1)
(r +b
2)∆θ = aωR∆t (2)
Dividing the first equation (blue line, previous fig) by the second equation(red line, previous fig) gives
2r − b
2r + b=ωL
ωR(3)
Rearranging this equation (do it yourself later)
r =b(ωR + ωL)
2(ωR − ωL)= b
ωmean
ωdiff(4)
nep (UoY CS) PRAC Practical Robotics December 17, 2014 13 / 31
Kinematic modelling of a differential drive
Observation: the turning radius is independent of the drive wheelradius, a, as expected (?)
Beware of th singularity (divide by zero) for a straight path (infiniteradius), maybe it is better to computer turning curvature?
κ =1
r=
1
b
ωdiff
ωmean(5)
Note that κ = 0 for the same angular velocities, i.e. when ωdiff = 0.
However, now we have a singularity when turning on the spot,ωL = −ωR hence ωmean = 0.
Practical solution: compute value of |ωmean| and for values lower thansome minimum, switch to turning radius representation.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 14 / 31

Kinematic modelling of a differential drive
1 We note that v = θ̇r is linear in r and that the robot’s origin is themidpoint between the two drive wheels.
2 This implies that the tangential speed, v , of the robot’s origin alongits curved path must be the average of the two tangential wheelspeeds, as follows:
v =vR + vL
2=
a(ωR + ωL)
2= aωmean (6)
Thus the transformation (ωL, ωR)→ (v , κ) from angular wheel speeds totangential speed and turning curvature is
v =a(ωR + ωL)
2= aωmean, κ =
2(ωR − ωL)
b(ωR + ωL)=
ωdiff
bωmean. (7)
nep (UoY CS) PRAC Practical Robotics December 17, 2014 15 / 31

Kinematic modelling of a differential drive
1 However, in our robot system, we want to specify the (signed scalars)robot speed (v) and steering curvature (κ), using software routinesfor velocity and steering control respectively.
2 Thus we need to invert the relation on the previous slide, in order toget the required mapping (v , κ)→ (ωR , ωL)
3 To make v and κ independent of each other, we need to increase thespeed of the right wheel by ∆ω and decrease the left wheel speed bythe same amount, relative to the mean angular wheel speed definedby the desired velocity, v .
nep (UoY CS) PRAC Practical Robotics December 17, 2014 16 / 31
Kinematic modelling of a differential drive
It is straightforward to show the relation below (prove it for yourself)
∆ω =b
2a(κv) (8)
hence the required relation (v , κ)→ (ωL, ωR) is given by
ωR =v
a(1 +
κb
2) (9)
ωL =v
a(1− κb
2) (10)
For high positive curvatures, this may result in a negative value for ωL andthe wheel rotation direction would need to be reversed. Similarly, for highnegative curvatures, the right wheel rotation direction may need reversing.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 17 / 31
Lecture 1, part 2: Sensors used in this study
1 Infra-red (IR) distance sensors: extereoceptive
not always available due to limited operating rangeerrors fairly predictable and do not grow over time
2 Optical odometry: proprioceptive
always available,errors much less predictable, not independent (x, y dependent on θerror) and grow with time
3 Note the complementary nature of these two sensor systems : theycan be used to implement a predict-correct (odometry prediction, IRcorrection) localisation system.
4 Both systems require modelling : parameters to be found via directmeasurement or calibration.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 18 / 31
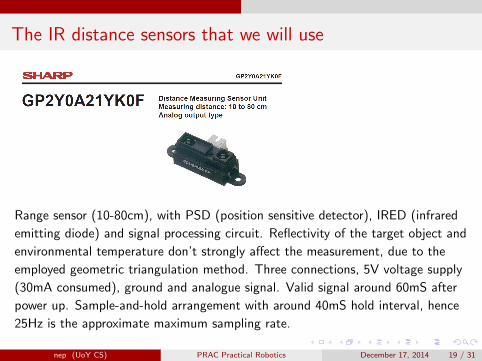
The IR distance sensors that we will use
Range sensor (10-80cm), with PSD (position sensitive detector), IRED (infrared
emitting diode) and signal processing circuit. Reflectivity of the target object and
environmental temperature don’t strongly affect the measurement, due to the
employed geometric triangulation method. Three connections, 5V voltage supply
(30mA consumed), ground and analogue signal. Valid signal around 60mS after
power up. Sample-and-hold arrangement with around 40mS hold interval, hence
25Hz is the approximate maximum sampling rate.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 19 / 31

IR distance sensor characteristics
Output voltage is roughly in proportion to the position of the imagedIR spot on the PSD.
This PSD position is roughly proportional to the inverse of thetarget’s distance (a property of triangulation geometry).
nep (UoY CS) PRAC Practical Robotics December 17, 2014 20 / 31
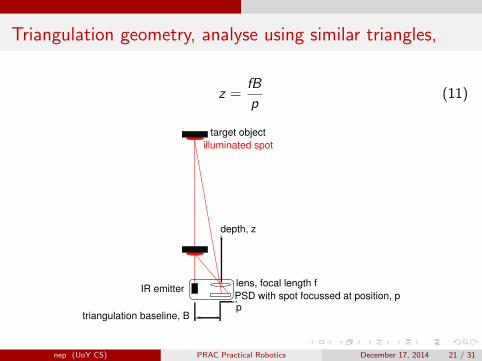
Triangulation geometry, analyse using similar triangles,
z =fB
p(11)
IR emitter
target object
illuminated spot
PSD with spot focussed at position, p
triangulation baseline, Bp
depth, z
lens, focal length f
nep (UoY CS) PRAC Practical Robotics December 17, 2014 21 / 31

Triangulation geometry
Image position, p and sensor range z are inversely proportional.
For a small change in p (eg, due to sensor noise), what is the changein z?
∂z
∂p= − fB
p2= − z2
fB(12)
If random noise level on p was constant over all distances (z),measurement repeatability would drop as square of distance, just dueto triangulation geometry.
However, the signal drops as square of distance which, for a PSD,causes random noise on p to also increase with the square of distance.
Combining both the geometric effect in (1) with the photometriceffect in (2) results a ranging RMS error that increases with thefourth power of distance!
nep (UoY CS) PRAC Practical Robotics December 17, 2014 22 / 31

IR sensor calibration
How do we convert a raw voltage reading (via ADC) to a distancemeasurement? Choosing a method and finding that method’s values orparameters is called sensor calibration. Possible methods:
1 Look up table
‘voltage - distance’ with linear interpolation (piecewise linear sensormodel).Look up table ‘voltage - reciprocal distance’ with linear interpolation(more accurate?)
2 Fit a parametric function using least-squares model fitting
Can use either the characteristic in (1) or (2) above using, for example,a polynomial (what order? linear, quadratic?)
nep (UoY CS) PRAC Practical Robotics December 17, 2014 23 / 31

Local pose estimation with IR sensors
1 For local pose estimation, measure distance and orientation relative totarget (wall).
2 This may be used to correct any errors in global position estimation(from odometry).
3 Need the position and orientation of the IR sensors in the robot’scoordinate frame, (xR
s , yRs , θ
Rs )i for i = 1 . . . 4.
4 Assuming good sensor orientation alignment, and accuratesymmetrical sensor distribution we may reduce from 12 to 2parameters (α, β), see next slide.
5 In the practical labs, decide for yourself whether or not this ’regularrectangle’ simplifying assumption is acceptable in terms of accuracy inlocal pose estimation.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 24 / 31

Local pose estimation with IR sensors
yLt
Lθ
yL
yLt yL
dLF
d LR
xR
θR
yR
yx s θs( )s, , − sensor coordinates
in robot centred frame
Infra red distance sensor
α
β
xL
Ly
−
Note that y L is positive here
θ L is negative here
θL
local (path) frame
R R R
θL = tan−1
(dLR − dLF
2β
), y L = y L
t −dLR + α
cos θL(13)
where y Lt is the distance between the demand path and the target (wall).
nep (UoY CS) PRAC Practical Robotics December 17, 2014 25 / 31
Odometry using optical shaft encoders
1 For every revolution of a drive wheel, n digital pulses are generated.
2 There are two square wave signal 90 degrees out of phase - phaseindicates wheel’s rotational direction (may not need this - why?).
3 How do we determine the robot’s global position update based on theincremental change in drive wheel rotation over time ∆t?
4 Suppose the changes in pulse counts over ∆t are ∆wL,R , thencomparing to Eqn. 7,
r =1
κ=
b(∆wR + ∆wL)
2(∆wR −∆wL)(14)
∆θ =2πa
nb(∆wR −∆wL) (15)
nep (UoY CS) PRAC Practical Robotics December 17, 2014 26 / 31

Odometry using optical shaft encoders
Odometry software function should consider two cases
1 When the (signed) returned count from each wheel is different.
2 When the (signed) return count from each wheel is the same, straightline, no rotation, hence r =∞.
The first case is described overleaf, the second (simpler case) is left as anexercise.
nep (UoY CS) PRAC Practical Robotics December 17, 2014 27 / 31
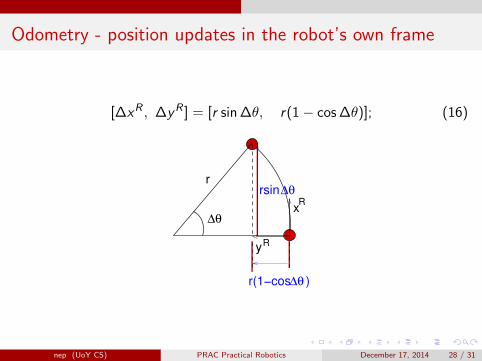
Odometry - position updates in the robot’s own frame
[∆xR , ∆y R ] = [r sin ∆θ, r(1− cos ∆θ)]; (16)
xR
yR
rrsin∆θ
∆θ
r(1−cos∆θ )
nep (UoY CS) PRAC Practical Robotics December 17, 2014 28 / 31
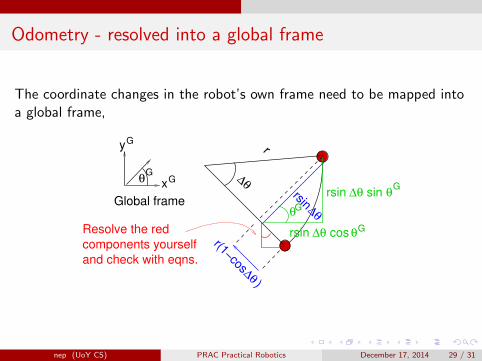
Odometry - resolved into a global frame
The coordinate changes in the robot’s own frame need to be mapped intoa global frame,
∆θrsin cos θ
∆θrsin θsinx
y
θ
Global frame
G
G
G
Resolve the red
components yourself
and check with eqns.
r(1−cos∆θ )
r
rsin∆θ
∆θ
θ
G
G
G
nep (UoY CS) PRAC Practical Robotics December 17, 2014 29 / 31
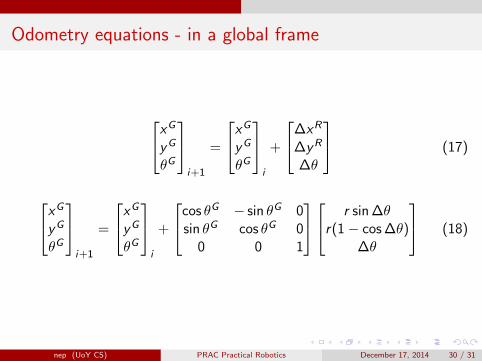
Odometry equations - in a global frame
xG
y G
θG
i+1
=
xG
y G
θG
i
+
∆xR
∆y R
∆θ
(17)
xG
y G
θG
i+1
=
xG
y G
θG
i
+
cos θG − sin θG 0sin θG cos θG 0
0 0 1
r sin ∆θr(1− cos ∆θ)
∆θ
(18)
nep (UoY CS) PRAC Practical Robotics December 17, 2014 30 / 31

Closing slide
This lecture will help you with the first two practical classes:
Lab 1a (week 2): Calibrating, characterising and using the IR rangesensors.
Lab 1b (week 3): Calibrating, characterising and using the odometrysensors.
Any questions?nep (UoY CS) PRAC Practical Robotics December 17, 2014 31 / 31
Related Documents

![iBOT - Robotics Practical Book for IPST-MicroBOX [SE]](https://static.cupdf.com/doc/110x72/579091101a28ab7b278f5eba/ibot-robotics-practical-book-for-ipst-microbox-se.jpg)









