-
8/17/2019 Pds Fase1 2016
1/91
Procesamiento Digital deSeñales
Ing. Víctor Hugo Rivera Chávez
PRIMERA FASEEPIE - UCSM
-
8/17/2019 Pds Fase1 2016
2/91
-
8/17/2019 Pds Fase1 2016
3/91
Temario
I. Muestreo de señales y conversión A/D
II. Análisis de señales y sistemas discretos en
el dominio del tiempo
III. La Transformada Z
IV. Análisis de señales y sistemas discretos en
el dominio de la frecuenciaV. Introducción al diseño de filtros digitales
-
8/17/2019 Pds Fase1 2016
4/91
BibliografíaLibro de texto• Digital Signal Processing: Principles,
algorithms and applicationsJ. G. Proakis & D. G. Manolakis.Pearson Education Inc. 3a Ed. 1996.
Libros de consulta• Introduction to Signals and Systems
D. K. Lindner
McGraw Hill, 1999.• Signals and Systems: Continuous and Discrete.
R. E. Ziemer, W. H. Tranter & D. R. FanninPrentice Hall, 4a Ed. 1998
• Principles of Signals and SystemsF. J. TaylorMcGraw Hill, 1a Ed. 1994
• Signals and SystemsA. V. OppenheimPrentice Hall, 1a Ed. 1993.
• Analog and Digital Communication SystemsM. S. RodenPrentice Hall, 4a Ed. 1996.
-
8/17/2019 Pds Fase1 2016
5/91
I. Muestreo de Señales y Conversión
A/D
0. Introducción
1. Conversión A/D
2. Teorema del muestreo
-
8/17/2019 Pds Fase1 2016
6/91
0. Introducción
Señales, sistemas y procesamiento de señales
Una señal está definida como una cantidad física que varía
en el tiempo, espacio, o con otra(s) variable(s)
s1(t) = 5t
s2(t) = 20 t 2
s(x,y) = 3x + 2xy + 10y2
s =∑1≤i≤N Ai(t) sen[2π F i(t)t + θ i(t)]
Módulo 1
-
8/17/2019 Pds Fase1 2016
7/91
¿Cómo se generan las señales?• La generación de la señal está asociada con un
sistema que responde al estímulo.
• El estímulo en combinación con el sistema es
llamado fuente de la señal .
• Un sistema se puede definir como un dispositivo
físico que efectúa una operación a una señal.
• La realización de esas operaciones sonreferidas como procesamiento de la señal .
Módulo 1
-
8/17/2019 Pds Fase1 2016
8/91
Módulo 1
Elementos básicos de un sistema PDS.
• La mayoría de las señales son analógicas por
naturaleza.• Estas señales son funciones de una variable
continua (tiempo, espacio).
•Pueden procesarse con sistemas analógicos(filtros o analizadores de frecuencia).
• En estos casos la señal se ha procesado
directamente en su forma analógica.
Procesador
de la señal
analógica
Señal
Analógica
de entrada
Señal
Analógica
de salida
-
8/17/2019 Pds Fase1 2016
9/91
Módulo 1
• El procesamiento de la señal digital nos da un método
alternativo para procesar la señal analógica
• Se requiere de una interfaz: Convertidor A/D
• En ciertas aplicaciones requerimos de otra interfaz:
Un convertidor D/A
Procesador
de la señal
digital
Señal
Analógica
de entrada
Señal
Analógica
de salida
A/D D/A
Señal
digital de
entrada
Señal
digital de
salida
-
8/17/2019 Pds Fase1 2016
10/91
Clasificación de las señales
Los métodos a emplear en el procesamiento ó análisisde una señal depende en gran medida de sus
características.
• Señales multicanal y multidimensionales.
• Señales continuas y discretas en el tiempo.
• Señales con valores continuos y con valores discretos.
• Señales determinísticas y aleatorias.
Módulo 1
-
8/17/2019 Pds Fase1 2016
11/91
Módulo 1
-
8/17/2019 Pds Fase1 2016
12/91
Concepto de frecuencia en señales continuas y
discretas en el tiempo.
xa(t) = A cos( Ωt + θ ), -∞ < t < ∞ Ω = 2π F : Frecuencia angular
1. Para cada F determinada, xa(t) es periódica.
T p = 1/F es el período fundamental.
2. Diferentes frecuencias, señales diferentes3. Mayor frecuencia, mayor oscilación
xd (n) = A cos( ωn + θ ), -∞ < n < ∞
ω = 2π f : Frecuencia angular
1. La señal es periódica si f es un racional. f = k/N ; cos[2π f(N+n) + θ ] = cos[2π fn + θ ] El menor N es el periodo fundamental.
2. Dos o más señales son iguales si sus f las separa un múltiplo de 2π
3. La mayor oscilación solo se logra si ω= ± π ó f = ± ½
Nota: Identidad de Euler Acos( ωn + θ ) = ½Ae j( ωn + θ )
+ ½Ae-j( ωn + θ )
-
8/17/2019 Pds Fase1 2016
13/91
1. Conversión A/D
• Muchas señales de interés práctico son analógicas:
voz, sísmicas, biológicas, radar, sónar, audio, video,
etc.
•Para procesarlas por medios digitales es necesarioconvertirlas en una señal digital:
Conversión Analógica a Digital .
• Esta conversión consta de tres pasos:
– Muestreo
– Cuantización
– Codificación
Módulo 1
-
8/17/2019 Pds Fase1 2016
14/91
Conversión A/D
-
8/17/2019 Pds Fase1 2016
15/91
Muestreo
Conversión de una señal continua a discreta en el tiempo a travésde muestras de la señal tomadas en instantes discretos de tiempo.
xa(t) es la entrada al “muestreador” x(nT) ≡ x(n) es la salida
T es el intervalo de muestreo
Cuantización
Conversión de una señal discreta de valores continuos a valoresdiscretos (digital).
El valor de cada muestra se representa con un elementoseleccionado de un conjunto finito de posibles valores.
La diferencia x(n) – xq(n) se llama error de cuantización.
Codificación
Cada valor discreto cuantizado xq(n) se representa mediante unasecuencia binaria b-bit .
Módulo 1
-
8/17/2019 Pds Fase1 2016
16/91
Muestreador CodificadorCuantizadorx a (t)x(n) x
q
(n)0100…
Señal
analógica
Señal
discretaSeñal
cuantizada
Señal
dig i ta l
Convert ido r A/DMódulo 1
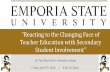
• En ocasiones es deseable convertir la señal digitalprocesada en analógica: Convertidor D/A
• Se conectan puntos a través de interpolación• Para señales con contenido de frecuencia limitado
(ancho de banda finito), el teorema de muestreo especifíca la forma óptima de interpolar
-
8/17/2019 Pds Fase1 2016
17/91
• El muestreo no produce pérdida de información ni
distorsión si la señal tiene un ancho de banda finito• Una señal análoga se puede reconstruir de muestras
si la tasa de muestreo es lo suficientemente alta para
no producir aliasing
• La cuantización es irreversible y produce distorsión,
la cual depende de la resolución (número de bits).
• La resolución implica costo, lo mismo que la tasa de
muestreo
-
8/17/2019 Pds Fase1 2016
18/91
Al iasing
-
8/17/2019 Pds Fase1 2016
19/91
Muestreo de señales analógicas
Muestreo periódico o uniforme.
x(n) = xa(nT), -∞ < n < +∞ T es el período de muestreo
F s = 1/T es la tasa o frecuencia de muestreo(# de muestras por segundo ó Hertz )
t = nT = n/F s
Relación entre al F de
la señal analógica y
la f de la señal digital: f = F/F s
x(n) = xa(nT)
-
8/17/2019 Pds Fase1 2016
20/91
Muestreo
-
8/17/2019 Pds Fase1 2016
21/91
Relaciones entre variables de frecuencia
Señal continua Señal discreta
Ω = 2 π Frad/s Hz
ω = 2 π frad/muestra cic los/muestra
ω = ΩT
f = F/F s- π ≤ ω ≤ π
- ½ ≤ f ≤ ½ Ω = ω /T
F = f·F s- π/T ≤ Ω ≤ π /T
- F s /2 ≤ F ≤ F s /2
- ∞ ≤ Ω ≤ ∞
- ∞ ≤ F ≤ ∞
El muestro introduce ambigüedad, la frecuencia más alta
en una señal continua que puede distinguirse cuando la
señal se muestrea a F s = 1/T es F max = ½ F s = 1/(2T) y
Ωmax
= π F s = π /T
x a (t) =
Acos(2 π Ft + θ )
Acos ( Ωt + θ )
x(n) =
Acos(2 π fn + θ )
Acos( ωn + θ )
-
8/17/2019 Pds Fase1 2016
22/91
Sean x1(t) = cos20π t y x2(t) = cos100π t con F s = 40 Hz
¿Cuáles son x1
(n) y x2
(n)?
Mód l 1
-
8/17/2019 Pds Fase1 2016
23/91
xa(t) = 3 cos 100π t
a) ¿Cuál sería la F s
mínima para evitar aliasing ?
b) Si F s = 200 Hz ¿Cuál sería x(n)?
c) Si F s = 75 Hz ¿Cuál sería x(n)?
d) ¿Cuál sería la frecuencia 0 < F < F s /2 de una señal
senoidal con muestras idénticas a x(n) en c)?
Módulo 1
Respuestas
a) Fs ≥ 100 Hz
b) x(n) = 3 cos(π n/2)
c) x(n) = 3 cos(2 π n/3)
d) F = 25 Hz
ya(t) = 3 cos 50 π t
Mód l 1
-
8/17/2019 Pds Fase1 2016
24/91
Módulo 1
2. Teorema del muestreo
Dada una señal analógica, ¿cómo podemos seleccionar elperíodo de muestreo T , o su tasa de muestreo F s?
Información acerca de la señal: contenido de frecuencia.
Señal de voz: Menor a 3000 Hz
Señal de TV: Menor a 5 MHz
La información se encuentra en las amplitudes,
frecuencias y fases de los componentes de la señal.
Mód lo 1
-
8/17/2019 Pds Fase1 2016
25/91
Módulo 1
Conociendo la máxima frecuencia contenida en una
señal, se puede determinar la tasa de muestreo.
Podemos suponer que las componentes de una señal
no exceden a una frecuencia conocida F max.
Con F max podemos determinar la tasa de muestreoadecuada a nuestra señal.
Para evitar ambigüedades como el aliasing, la tasa de
muestreo se selecciona de modo que:
F s > 2F max
Módulo 1
-
8/17/2019 Pds Fase1 2016
26/91
Módulo 1
Teorema del muestreo.
La frecuencia más alta contenida en una señal analógica
xa(t) es F max = B y si la señal se muestrea a una tasa F s >2F max ≡ 2B, entonces xa(t) puede recuperarse
exactamente a partir de los valores de sus muestras
empleando la función de interpolación
g(t) = sen2π Bt / 2π Bt
Así xa(t) puede expresarse como
donde xa(n/F s ) = xa(nT ) ≡ x(n) son las muestras de xa(t).
Módulo 1
-
8/17/2019 Pds Fase1 2016
27/91
Módulo 1
Cuando el muestreo se efectúa con la tasa mínima F s =
2B, la fórmula de reconstrucción es:
La tasa de muestreo F N = 2B = 2F max se conoce como
tasa de Nyquist .
Módulo 1
-
8/17/2019 Pds Fase1 2016
28/91
Ejercicios.
1. ¿Cuál es la tasa de Nyquist para xa(t)?
2. ¿Cuál es la tasa de Nyquist para xa(t)?
Si F s = 5000 muestras/s ¿Qué señal se obtiene después
del muestreo?
¿Cuál es la señal reconstruida ya(t) si usamos
interpolación ideal?
Módulo 1
Módulo 1
-
8/17/2019 Pds Fase1 2016
29/91
Módulo 1
Cuantización de señales de amplitud continua.
Una señal digital es una secuencia de muestras donde
cada una se representa con un número finito dedígitos.
El proceso de convertir una señal discreta de amplitud
continua en una señal digital expresando cada valor de
una muestra con un número finito de dígitos es
llamado cuantización.
El error introducido en la representación de una señal
de valores continuos con un conjunto finito de nivelesdiscretos de valores se llama error o ruido de
cuantización.
Módulo 1
-
8/17/2019 Pds Fase1 2016
30/91
Módulo 1
La operación de cuantización de las muestras x(n) se
representa como:
xq(n) = Q[x(n)]El error de cuantización se representa como:
eq(n) = xq(n) – x(n)
Módulo 1
-
8/17/2019 Pds Fase1 2016
31/91
Operaciones involucradas en la cuantización.
1. Truncamiento
2. Redondeo
val = 0.59049 t(val) = 0.5 r(val) = 0.6
Los valores permitidos en una señal digital se llamanniveles de cuantización.
La distancia entre dos niveles sucesivos de
cuantización se llama paso de cuantización o resolución
( Δ ).
El error de cuantización eq(n) en el redondeo es:
- Δ /2 ≤ eq(n) ≤ Δ /2
Módulo 1
Módulo 1
-
8/17/2019 Pds Fase1 2016
32/91
Si xmin y xmax representan los valores mínimo y máximo
de x(n) y L es el número de niveles de cuantización,
entonces: Δ = (xmax - xmin ) / (L - 1)
xmax - xmin es el rango dinámico de la señal.
Módulo 1
-
8/17/2019 Pds Fase1 2016
33/91
Módulo 1
-
8/17/2019 Pds Fase1 2016
34/91
Codificación de muestras cuantizadas.
La codificación en los convertidores A/D asigna un
número binario único a cada nivel de cuantización.Una palabra de b bits crea 2b números binarios
diferentes.
Entonces tenemos 2b ≥ L ó b ≥ sup[log 2 L]
Conversión D/A.
La tarea del CDA es interpolar las muestras.
El teorema del muestreo especifica la interpolación
óptima para señales de banda limitada.
Suele emplearse un post filtrado a la señal obtenida de
esta conversión. Ej, Filtro de aplanamiento.
Módulo 1
Módulo 1
-
8/17/2019 Pds Fase1 2016
35/91
Módulo 1
Muestreo, cuantización e interpolación
-
8/17/2019 Pds Fase1 2016
36/91
La señal discreta x(n) = 6.35 cos (πn/ 10) es cuantizada con una resolución a) Δ
= 0.1
b) Δ = 0.02
¿Cuántos bits se requieren en cada caso y con cuántos niveles de cuantización L?
-
8/17/2019 Pds Fase1 2016
37/91
II. Anális is de señales y de
s istemas d isc retos en eldom in io del tiempo
0. Introducción1. Sistemas lineales discretos e invariantes
con el tiempo.
2. Descripción de un sistema por medio desu ecuación de diferencias
Módulo 2
-
8/17/2019 Pds Fase1 2016
38/91
Módulo 2
0. Introducción
Señales discretas en el tiempo.
• x(n) es una función de una variable independiente que
es un entero
• Estas señales no están definidas en los instantes entre
dos muestras sucesivas
• x(n) = 0 si n no es entero
• Suele asumirse que - ∞ < n < ∞
Módulo 2
-
8/17/2019 Pds Fase1 2016
39/91
ódu o
Además de la representación gráfica existen otras
alternativas:
• Representación funcional
• Representación tabular
• Representación secuencial
x(n) = {… 0, 0, 1, 4, 1, 0, 0, …}
para n = 1,3 para n = 2
de otra manera
n … -2 -1 0 1 2 3 4 5 …
x(n) … 0 0 0 1 4 1 0 0 …
-
8/17/2019 Pds Fase1 2016
40/91
Módulo 2Clasificación de las señales discretas
-
8/17/2019 Pds Fase1 2016
41/91
Clasificación de las señales discretas.
• Señales de energía y de potencia
Si la energía es finita se llama energía de la señal y si la potencia
es finita ésta es la potencia de la señal
• Señales periódicas y aperiódicas
x(n) es periódica con periodo N sí y solo sí
x(n + N) = x(n) para toda n (1)
El menor valor de N que satisfaga (1) es el periodo fundamental
Si no existe N que satisfaga (1) la señal es aperiódica.• Señales simétricas (par) y antisimétricas (impar)
x(n) = x(-n) Señal simétrica
-x(n) = x(-n) Señal antisimétrica
Módulo 2
-
8/17/2019 Pds Fase1 2016
42/91
Manipulaciones de señales discretas.
• Transformación de la variable independiente t .Se sustituye n por n ± k y tenemos un desplazamiento según el
signo de k (+ retraso, - adelanto)
• Adición, multiplicación y escalamiento de secuencias y(n) = x1(n) + x2(n)
y(n) = x1(n)*x2(n)
y(n) = Ax(n) para toda n
Aquí la amplitud es la que se modifica
Módulo 2
-
8/17/2019 Pds Fase1 2016
43/91
Sistemas discretos en el tiempo.
Es un dispositivo o algoritmo que opera sobre una señal
discreta en el tiempo, llamada entrada o excitación,
acorde a reglas bien definidas, para producir otra señal
discreta en el tiempo llamada salida o respuesta del
sistema.
La señal de entrada x(n) es transformada por el sistema
en la señal y(n). Esta relación se expresa:
y(n) ≡Τ [x(n)] donde el operador T denota la
transformación o procesamiento efectuado a x(n)
Módulo 2
-
8/17/2019 Pds Fase1 2016
44/91
Clasificación de sistemas digitales.
• Sistemas sin memoria ó estáticos. Cuando la salida de
cualquier valor n depende solo de la entrada en el mismo valor n. y(n) = x(n)2 y(n) = ax(n) y(n) = nx(n) + bx3(n)
• Sistemas con memoria ó dinámicos. Cuando la salida en un
valor n depende de las entradas en el intervalo [n-N, n], N ≥ 0, sedice que el sistema tiene memoria de duración N .
Si N = 0 el sistema es estático; si 0 ≤ N < ∞, el sistema tiene
memoria finita; si N < ∞, tiene memoria infinita.
y(n) = x(n) + 3x(n-1) y(n) = ∑x(n-k) ; k=0…n
y(n) = ∑x(n-k) ; k=0…∞
Módulo 2
-
8/17/2019 Pds Fase1 2016
45/91
• Sistemas invariantes con el tiempo. Son aquellos sistemaspara los que un desplazamiento temporal de la secuencia de
entrada provoca el mismo desplazamiento en la secuencia de
salida.
Si para x1(n) = x(n – k) se produce y1(n) = y(n - k)
• Sistemas variantes con el tiempo. Aquellos donde la salida
cumple con y1(n) ≠ y(n - k), incluso para un solo valor de k .
-
8/17/2019 Pds Fase1 2016
46/91
Determinar si los siguentes sistemas son invariantes:
y(n) = x(n) – x(n - 1) y(n) = nx(n) y(n) = x(-n) y(n) = x(n) cos ωn
Módulo 2
-
8/17/2019 Pds Fase1 2016
47/91
• Sistemas lineales. Definidos por el principio de superposición.Sean y1(n) e y2(n) las respuestas a las entradas x1(n) y x2(n),
el sistema es lineal solo sí:
T[a1 x1(n) + a2 x2(n)] = a1T[x1(n)] + a2T[x2(n)] =a1 y1(n) + a2 y2(n)
donde a1 y a2 son constantes arbitrarias.
• Sistemas no lineales. Aquellos que no satisfacen el principiode superposición.
Un sistema lineal en reposo, es aquel que a una entrada cero,produce una salida cero.
Un sistema que produce una salida diferente de cero cuando la
entrada es cero no está en reposo, o no es lineal .
-
8/17/2019 Pds Fase1 2016
48/91
Determinar si los siguientes sistemas son lineales:
y(n) = n x(n) y(n) = x(n2 ) y(n) = x2(n)
y(n) = Ax(n) + B y(n) = e x(n)
Módulo 2
-
8/17/2019 Pds Fase1 2016
49/91
• Sistemas causales. Cuando para cualquier valor n0, el valor dela secuencia de salida en n = n0 depende solo de los valores de
entrada para n ≤ n0. Es decir, la salida depende de las entradaspasadas y presentes.
• Sistemas no causales. Aquellos que no cumplen lascondiciones de causalidad.
y(n) = x(n) – x(n - 1) y(n) = ax(n) y(n) = ∑ x(k); k= -∞ …n
y(n) = x(n) + 3x(n + 4) y(n) = x(n2 ) y(n) = x(2n) y(n) = x(-n)
-
8/17/2019 Pds Fase1 2016
50/91
Módulo 2
-
8/17/2019 Pds Fase1 2016
51/91
1. Sistemas lineales discretos e
invariantes con el tiempo (LTI).
• Los sistemas LTI son caracterizados en el dominio del tiempo
por su respuesta al impulso unitario.
• Cualquier señal arbitraria se puede descomponer y representarcomo una suma ponderada de impulsos unitarios.
• Las propiedades de linealidad e invarianza en el tiempo hacen
que la respuesta del sistema a cualquier señal de entrada se
pueda expresar en términos de su respuesta al impulsounitario.
Módulo 2
é i l áli i d i li l
-
8/17/2019 Pds Fase1 2016
52/91
Técnicas para el análisis de sist. lineales.
• Método basado en la solución directa de la ecuación de
entrada-salida para el sistema.
• Descomponiendo la señal de entrada en una suma de
señales elementales.
Las señales elementales se eligen de modo que la respuesta del
sistema a cada componente de la señal se pueda determinar
con facilidad. Debido a la linealidad del sistema, las respuestas
se suman para tener la respuesta total.
-
8/17/2019 Pds Fase1 2016
53/91
Módulo 2
Representación de una señal discreta en impulsos
-
8/17/2019 Pds Fase1 2016
54/91
Sea x(n) una señal arbitrariay xk (n) = δ(n - k)
k es el retardo del impulso unitario
Multiplicando x(n) y δ (n - k) tenemos
x(n)δ (n - k) = x(k)δ (n - k)
una secuencia de ceros excepto
cuando n = k
Repitiendo para -∞ < k < ∞ tenemos
Representación de una señal discreta en impulsos
unitarios
Módulo 2
L t d l i t LTI t d
-
8/17/2019 Pds Fase1 2016
55/91
La respuesta de los sistemas LTI a entradas
arbitrarias: La suma de convolución.
Sea h(n, k) la respuesta del sistema a un impulso unitario enel instante n = k , para -∞ < k < ∞. Esto es:
y(n, k) ≡ h(n, k) = T[δ(n - k)]
Si escalamos el impulso a la entrada por ck ≡ x(k), esto es
ck h(n, k) = x(k) h(n, k)
Y si x(n) se expresa como
Tenemos finalmente que la respuesta del sistema a x(n) es
Módulo 2
-
8/17/2019 Pds Fase1 2016
56/91
Si la respuesta del sistema LTI a δ(n) se denota como h(n)
Esto es:
h(n) ≡ T[δ(n)]Por la propiedad de invarianza, la respuesta a δ(n - k) es
h(n - k) = T[ δ(n - k)]
Entonces tenemos que:
La función de respuesta del sistema LTI se conoce como suma deconvolución.
La entrada x(n) es “convolucionada” por la respuesta al impulso
h(n) para producir la salida y(n).
Módulo 2
-
8/17/2019 Pds Fase1 2016
57/91
Análisis de la suma de convolución.
Deseamos calcular la salida del sistema para n = n0, entonces:
Observaciones:
• x(k) y h(n0-k) son funciones del índice k .
• x(k) y h(n0-k) se multiplican entre si para producir una secuencia
de productos.
• y(n0 ) es la suma de los productos
• h(n0
-k) se obtiene de h(k), reflejándola alrededor de k = 0,
produciendo h(-k), y luego desplazando en n0.
Módulo 2
-
8/17/2019 Pds Fase1 2016
58/91
La suma de convolución involucra cuatro pasos:
1. Reflejo. Se refleja h(k) alrededor de k = 0 para tener h(-k).
2. Desplazamiento. Se desplaza h(-k) en n0 a la derecha (izquierda)si n0 es positivo (negativo) para obtener h(n0 - k).
3. Multiplicación. Se multiplica x(k) por h(n0-k) para tener la
secuencia de productos vn0(k) ≡ x(k)h(n0-k).
4. Suma. Se suman todos los valores de la secuencia de productosvn0(k) para obtener el valor de la salida en n = n0.
Si nos interesa evaluar la respuesta del sistema para todos los
instantes de tiempo -∞ < n < ∞, repetimos los pasos del 2 al 4para todos los posibles desplazamientos n.
-
8/17/2019 Pds Fase1 2016
59/91
Determina la salida y(n) de un sistema LTI con respuesta al impulso h(n) = anu(n),
-
8/17/2019 Pds Fase1 2016
60/91
y( ( ) ( )
|a| < 1. Cuando la entrada es la secuencia escalón unitario x(n) = u(n)
Módulo 2
-
8/17/2019 Pds Fase1 2016
61/91
Propiedades de la convolución.
Conmutativa.
x(n)*h(n) = h(n)* x(n)
Asociativa.
[x(n)*h1(n)]*h2(n) = x(n)*[h1(n)*h2(n)]
h(n) x(n) y(n)
x(n)h(n) y(n)
h2(n)
x(n) y(n)h(n)=
h1(n)*h2(n)
x(n) y(n)
h1(n)
h2(n) x(n) y(n)
h1(n) h1(n) x(n) y(n)
h2(n)
Determina la respuesta al impulso de la cascada de dos sistemas LTI con
-
8/17/2019 Pds Fase1 2016
62/91
respuestas al impulso h1(n) = ½nu(n) y h2(n) = ¼
nu(n)
-
8/17/2019 Pds Fase1 2016
63/91
Sistemas LTI causalesMódulo 2
-
8/17/2019 Pds Fase1 2016
64/91
Sistemas LTI causales
Sistema causal es aquel que cuya salida en n depende solo de las
entradas pasadas y presentes.
Causal es una condición sobre la respuesta al impulso.
Consideremos
Si subdividimos la suma tenemos:
Si el sistema es causal y n = n0 entonces h(n) = 0, n < 0.
Concluimos que : Un sistema LTI es causal si y solo si su respuesta
al impulso es cero para valores negativos de n.
Módulo 2
-
8/17/2019 Pds Fase1 2016
65/91
Si la entrada al sistema LTI causal es una secuencia causal (i.e. x(n)
= 0 para n < 0) se restringen los límites de la suma de
convolución.
Por lo tanto, la respuesta de un sistema causal a una secuencia de
entrada causal es causal, es decir
y(n) = 0 para n < 0.
Sistemas LTI establesMódulo 2
-
8/17/2019 Pds Fase1 2016
66/91
Sistemas LTI estables
Definimos un sistema arbitrario relajado como estable BIBO si y
solo si la secuencia de salida y(n) está acotada para toda entrada
acotada x(n).
Si x(n) está acotada, existe una constante M x tal que
De modo similar, si la salida está acotada, existe una constante M y
tal que
Tenemos la fórmula de convolución
Tomamos el valor absoluto de ambos lados de la fórmula
El valor absoluto de la suma de los términos es siempre menor oMódulo 2
-
8/17/2019 Pds Fase1 2016
67/91
El valor absoluto de la suma de los términos es siempre menor o
igual a la suma de sus valores absolutos
Si la entrada está acotada, existe un número finito M x tal que |x(n)|
≤ M x. Sustituyendo la cota superior para x(n) tenemos
Vemos que la salida está acotada si la respuesta al impulso del
sistema satisface
Un sistema LTI es estable si su respuesta al impulso es
absolutamente sumable.
Esta condición no es suficiente pero si necesaria para asegurar la
estabilidad del sistema
Sistemas con respuesta al impulso de duraciónMódulo 2
-
8/17/2019 Pds Fase1 2016
68/91
Sistemas con respuesta al impulso de duración
finita e infinita
Los sistemas LTI se clasifican en dos:
1. Con respuesta finita al impulso (FIR)
2. Con respuesta infinita al impulso (IIR)
Un sistema FIR tiene una respuesta al impulso de cero fuera de un
intervalo de tiempo finito. En ellos
h(n) = 0 , n < 0 y n ≥ M
Y la fórmula de convolución se reduce a:
El sistema actúa como una ventana que solo ve las M muestras
más recientes de entrada al formar la salida.
Módulo 2
-
8/17/2019 Pds Fase1 2016
69/91
Los sistemas LTI IIR tienen una respuesta al impulso de duración
infinita. Su salida basada en la convolución seria:
Podemos decir que un sistema FIR tiene memoria finita de tamaño
M , mientras un sistema IIR tiene memoria infinita.
Módulo 2
-
8/17/2019 Pds Fase1 2016
70/91
2. Descripción de un sistema por
medio de su ecuación diferencial.
Los sistemas LTI se caracterizan por su respuesta al impulso h(n)
que les permite determinar su salida y(n) dada una secuencia de
entrada x(n) a través de la convolución.
Los FIR involucran sumas, productos y memoria finita para realizar
la convolución, mientras los IIR hacen imposible su desarrollo.Para realizar sistemas IIR se emplean ecuaciones diferenciales, y
son útiles para el desarrollo de filtros, modelado de fenómenos
físicos y sistemas físicos.
Sistemas discretos recursivos y no recursivosMódulo 2
-
8/17/2019 Pds Fase1 2016
71/91
Sistemas discretos recursivos y no recursivos
En ocasiones es deseable expresar la salida en términos de los
valores pasados de la salida misma.
Ejemplo, calcular el promedio acumulado de x(n) en el intervalo 0
≤ k ≤ n.
Se requiere almacenar todas las muestra de entrada x(k) para 0 ≤
k ≤ n. Donde si n crece, requerimos más memoria.
y y(n)
se calcula recursivamente.
Rearreglando algebraicamente tenemos:
Módulo 2
+ ×x(n) y(n)
-
8/17/2019 Pds Fase1 2016
72/91
Este es un ejemplo de un sistema recursivo. En general, un sistema
cuya salida y(n) depende de valores de salida pasados y(n-1), y(n-
2), … es llamado sistema recursivo.
Si n = n0, el tenemos
Y el témino y(n0 -1) es llamado condición inicial .
+
×
×
Z -1
x(n) y(n)
n
1/(n+1)
-
8/17/2019 Pds Fase1 2016
73/91
Módulo 2
Sistemas LTI caracterizados por ecuaciones
-
8/17/2019 Pds Fase1 2016
74/91
Sistemas LTI caracterizados por ecuaciones
diferenciales con coeficientes constantes
Estos sistemas son una subclase de los sistemas recursivos y no
recursivos.
Supongamos el sistema recursivo
donde a es una constante.
Si deseamos calcular la salida y(n) y asumimos la existencia de una
condición inicial y(-1), tenemos para n ≥ 0
+
Z-1
x(n) y(n)
a
Si el sistema está relajado en n = 0 entonces y( 1) = 0 y el sistema
Módulo 2
-
8/17/2019 Pds Fase1 2016
75/91
Si el sistema está relajado en n = 0, entonces y(-1) = 0 y el sistema
recursivo inicia sin condiciones iniciales.
Se dice entonces que el sistema se halla en estado cero y su salida
es una respuesta forzada o de estado cero y sz (n).
La cual es una suma de convolución donde x(n) se convoluciona
con la respuesta al impulso
Si el sistema inicialmente no está relajado [ y(-1 )≠0] y x(n) = 0 para
toda n. La salida del sistema con entrada cero es llamada respuesta
natural, libre o de entrada cero y zi(n).
Para x(n) = 0 y -∞ < n < ∞ tenemos para n ≥ 0.
Entonces:
Módulo 2
-
8/17/2019 Pds Fase1 2016
76/91
Entonces:
Un sistema con respuesta forzada o de estado cero depende de la
naturaleza del sistema y de la señal de entrada.
Un sistema con respuesta natural o de entrada cero depende de la
naturaleza del sistema y de la condición inicial.
En general, la respuesta total del sistema se expresa como:
La forma general de un sistema recursivo descrito por ecuaciones
diferenciales lineales con coeficientes constantes es:
)()()( n yn yn y zs zi
M
k
k
N
k
k k n xbk n yan y01
)()()(
1)()( 000
ak n xbk n ya M
k
k
N
k
k
Un sistema es lineal si satisface:
Módulo 2
-
8/17/2019 Pds Fase1 2016
77/91
Un sistema es lineal si satisface:
1. La respuesta total es igual a la suma de las respuestas de
entrada cero y estado cero.
2. El principio de superposición es aplicable a la respuesta de
estado cero: Estado cero lineal .
3. El principio de superposición es aplicable a la respuesta de
entrada cero: Entrada cero lineal .
Un sistema recursivo descrito por ecuaciones diferenciales
lineales con coeficientes constantes es lineal e invariante en el
tiempo.
Estos sistemas son estables si y solo si para toda entrada y
condición inicial acotadas, la respuesta total del sistema está
acotada.
Módulo 2
-
8/17/2019 Pds Fase1 2016
78/91
Solución a ecuaciones diferenciales con
coeficientes constantes (edcc)
Dada una edcc como la relación de entrada-salida de un sistema
LTI, el objetivo es determinar una expresión explícita para la salida
y(n).
- Método directo- Método indirecto (Transformada Z)
El método directo asume:
y(n) = yh
(n) + y p
(n)
yh(n) es la solución complementaria u homogénea
y p(n) es la solución particular.
Módulo 2
-
8/17/2019 Pds Fase1 2016
79/91
La solución homogénea.
Asumimos x(n) = 0 para obtener la solución a la ecuación
diferencial homogénea:
Suponemos que la solución es exponencial
yh(n) = λn
Tenemos ahora la ecuación exponencial
Polinomio característico
El polinomio característico tiene N raíces λ1, λ2,…, λ N .Módulo 2
-
8/17/2019 Pds Fase1 2016
80/91
N
Las raíces pueden ser reales o complejas.
En la práctica los coeficientes a1, a2,…, a N son reales.
Las raíces complejas se presentan como pares conjugadoscomplejos.
Algunas de las N raíces pueden ser idénticas, teniendo raíces de
orden múltiple.
Suponiendo raíces distintas tenemos la solución general
Donde C 1, C 2,…, C N son coeficientes ponderados, determinados a
partir de las condiciones iniciales del sistema.Dado que la entrada x(n) = 0, la solución homogenea se puede
usar para obtener la respuesta de entrada cero del sistema.
Determinar la respuesta a la entrada cero de los siguientes sistemas:
-
8/17/2019 Pds Fase1 2016
81/91
Módulo 2
-
8/17/2019 Pds Fase1 2016
82/91
La solución particular.
y p(n) es cualquier solución que satisfaga:
Para resolverla, se asume una forma que dependa de la forma de
la entrada x(n).
Señal de entrada x(n) Solución particular y p (n)
A (constante) K
AM n KM n
An M K 0 n M + K 1 n
M-1 +…+ K M
An n M An (K 0 n M + K 1 n
M-1 +…+ K M )
Acos ω0 n
Asen ω0 nK 1 cos ω0 n + K 2 sen ω0 n
Determinar la solución particular de los sistemas:
-
8/17/2019 Pds Fase1 2016
83/91
Módulo 2
-
8/17/2019 Pds Fase1 2016
84/91
La solución total.
La propiedad de linealidad permite tener la solución total:
y(n) = yh(n) + y p(n)
La suma resultante y(n) contiene los parámetros constantes {C i}
dentro de yh(n).
Estas constantes pueden determinarse para satisfacer las
condiciones iniciales.
Una solución particular se puede obtener a partir de la respuesta
del sistema al estado cero.
Si|a1|
-
8/17/2019 Pds Fase1 2016
85/91
Si esta componente de la respuesta del sistema no tiende a cero
conforme n se acerca al infinito, se denomina la respuesta de
estado estacionario por parte del sistema.
Esta respuesta persiste mientras la entrada persista.
La componente que tiende a cero conforme n se acerca al infinito
es la respuesta transitoria del sistema.
Determinar la respuesta de los sistemas:
-
8/17/2019 Pds Fase1 2016
86/91
La respuesta al impulso de un sistema recursivoMódulo 2
-
8/17/2019 Pds Fase1 2016
87/91
p p
LTI
Cuando x(n) = δ(n) y el sistema está inicialmente relajado, h(n) es
igual a la respuesta al estado cero y zs(n).
Ejemplo, dado el sistema
su respuesta al estado cero es:
Sustituyendo x(n) = δ(n) tenemos:
Por lo tanto, la respuesta del sistema al impulso es:
h(n) = anu(n)
-
8/17/2019 Pds Fase1 2016
88/91
Determinar la respuesta al impulso del sistema:Módulo 2
-
8/17/2019 Pds Fase1 2016
89/91
Ob ió
Módulo 2
-
8/17/2019 Pds Fase1 2016
90/91
Observación:
Cualquier sistema recursivo descrito por edcc es un sistema IIR,
pues tienen respuesta al impulso de duración infinita.Pero no todo sistema LTI IIR puede describirse con edcc.
Cuando un sistema es descrito por una ec. diferencial lineal de
orden N , la solución a la ecuación homogénea es:
Donde las raíces { λk } son distintas.
La respuesta al impulso es idéntica: h(n) = yh(n).
Donde los parámetros {C k } se determinan poniendo las
condiciones iniciales y(-1) = … = y(-N) = 0.
Estabilidad:
S i l l i l bl
Módulo 2
-
8/17/2019 Pds Fase1 2016
91/91
Se requiere que la respuesta al impulso sea sumable, entonces,
para un sistema causal tenemos:
Ahora, si | λk | < 1 para toda k , entonces
y por lo tanto
Por otro lado, si algún | λk | ≥ 1, h(n) no es sumable en lo absoluto,
y en consecuencia, inestable.
Una condición necesaria y suficiente para que un sistema IIR
causal descrito por edcc sea estable es que todas las raíces del