18 CURSO DE GEOMETRÍA ANALÍTICA Oscar Cardona Villegas Héctor Escobar Cadavid UNIVERSIDAD PONTIFICIA BOLIVARIANA ESCUELA DE INGENIERÍAS 2016

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
18
CURSO DE GEOMETRÍA ANALÍTICA
Oscar Cardona Villegas
Héctor Escobar Cadavid
UNIVERSIDAD PONTIFICIA BOLIVARIANA
ESCUELA DE INGENIERÍAS
2016
MÓDULO 2
VECTORES
En la matemática moderna se ha llegado al concepto de vector por una
generalización del concepto geométrico o físico del mismo en el espacio ordinario
de tres dimensiones. En geometría analítica, que es una amalgama del álgebra y la
geometría, los vectores se emplean tanto en sentido geométrico como en sentido
algebraico, por lo tanto, se abordará el estudio de los vectores bajo ambas
perspectivas.
2.1 DEFINICIÓN DE VECTOR
Los vectores tuvieron su origen en la física. Se usaron por primera vez en
mecánica para representar una fuerza concentrada. Se sabe que hay dos tipos
básicos de cantidades que se consideran en la física: las que quedan
completamente determinadas por una magnitud y se denominan escalares. Toda
cantidad escalar se representa con un número real que indica su magnitud según
una escala o unidad de medida elegida previamente. Son ejemplos de cantidades
escalares: tiempo, distancia, masa, densidad, temperatura, trabajo, carga eléctrica,
área, volumen y población. Como los escalares son números reales, se usa el
álgebra de reales para operarlos. En este libro los escalares se van a representar
con letras minúsculas.
El otro tipo de cantidades físicas son aquellas que, para quedar completamente
determinadas, necesitan de dos características: magnitud y dirección, y se
20
denominan vectores. Son cantidades vectoriales, la posición relativa entre dos
puntos, fuerza, velocidad, aceleración y momento entre otras.
Los vectores forman un conjunto con el cual se puede constrir un álgebra. El
álgebra de los reales no sirve para hacer operaciones con vectores.
2.1.1 Definición geométrica
Se llama vector AB al segmento de recta dirigido u orientado cuyo punto inicial u
origen es A y cuyo punto final o extremo es B .
La longitud del segmento AB , definida una unidad de medida, es la magnitud o
módulo del vector y se representa AB . La inclinación del vector AB es la de la
recta AB (Toda recta determina una inclinación y todas las rectas y segmentos
paralelos a ella tienen la misma inclinación), y el sentido, dada una inclinación, es
en el que se hace el recorrido de A hacia B . Inclinación y sentido constituyen la
dirección del vector la cual se representa dirAB . En este orden de ideas, todo
vector AB está asociado con el movimiento de una partícula en línea recta desde
el punto A hasta el punto B . El vector AB se representa con una flecha que
indica la magnitud y la dirección.
A
B
Figura 2.1. Definición geométrica de vector
El vector AB se puede denotar de varias formas:
a. Las letras de su punto inicial y final, en ese orden, con una flecha encima o
sin ella: AB o AB
b. Con una letra mayúscula o minúscula con una flecha encima: A a , i , v
Nota: En este texto, sin embargo y por conveniencia, se van a representar los
vectores con negrilla.
Dados dos vectores AB y CD , si ocurre que al hacer coincidir su punto inicial A
con el punto inicial C , también coinciden sus puntos finales B y D , se dice que
AB es igual a CD , lo cual se escribeAB CD= . Esto implica que AB y CD
tienen la misma magnitud y la misma dirección. Todos los vectores iguales a AB
forman una clase* de vectores que se denomina vector libre. Es decir todos los
segmentos de recta dirigidos con igual módulo y dirección representan al mismo
“ente” geométrico denominado vector libre, o simplemente vector. Entonces, un
vector (libre) no tiene puntos inicial y final definidos sino que puede trasladarse
paralelamente a si mismo sin que cambien sus características.
Definición 2.1
Un vector, geométricamente, es un segmento de recta dirigido caracterizado por
una magnitud y una dirección.
Definición 2.2
a. Al vector cuyo módulo es cero se le llama vector nulo, se representa por 0 y
se acepta que no tiene dirección.
b. Se denomina vector unitario a un vector cuyo módulo sea la unidad.
* o conjunto.
22
c. Un vector que tenga la misma inclinación y el mismo módulo que AB , pero
sentido opuesto, se llama vector inverso el cual es único, y se escribe BAo
AB− . Además, se cumple que ( )AB AB− − = .
d. Un vector con la misma inclinación y sentido contrario que AB (y cualquier
magnitud) se llama vector opuesto.
2.1.2 Definición algebraica
La definición algebraica de un vector se establece al referirlo a un espacio
euclidiano n-dimensional. Es posible asociar a cada punto P de nE un vector
cuyo punto inicial sea el origen de nE y cuyo punto final sea el punto P . A este
vector OP que también se representa R , se le denomina vector de posición o
vector radar de P. De este modo a cada punto P de nE le corresponde un único
vector R y cada vector R está asociado con un único punto de nE . Esta
biyección permite representar al vector de posición correspondiente al punto P de
coordenadas 1 2( , ,..., )nx x x con la misma n-ada pero escrita 1 2, ,..., nx x x solo
para evitar confusiones.
Definición 2.3
Algebraicamente un vector es una n-ada ordenada de números reales
1 2, ,... nx x x en nE . Los ix 1,2,...,i n= se llaman componentes del vector.
Los vectores de posición son importantes en la determinación de la ecuación
vectorial de un conjunto de puntos de un espacio.

Un vector 1 2, ,... nx x x es libre, es decir que no es necesariamente un vector de
posición sino que puede tener su punto inicial en cualquier punto de nE , pero si se
toma como vector de posición (vectores de la misma clase) su punto final tiene
coordenadas 1 2( , ,..., )nx x x .
En la siguiente figura se ilustran los casos en 2E y
3E .
Y
XR=<x,y,z>Z
R
P(x,y,z)
Y
X
P(x,y)
R
R=<x,y>
Figura 2.2. Definición algebraica de vector
En nE , el vector nulo es =0 0,0,...,0 y el vector inverso de = 1 2, ,..., nA x x x
es − = − − −1 2, ,..., nA x x x
Una vez establecida la intima relación entre los vectores y el conjunto de las n-
adas de números reales en un espacio euclidiano (isomorfismo entre vectores y
n) resulta sencillo poder determinar la magnitud y la dirección de un vector si se
conocen las componentes de la n-ada que lo representa.
Sea = 1 2, ,..., nV x x x un vector de nE . Para determinar su magnitud y dirección,
se toma V como un vector de posición. De este modo:
a. El módulo de V es la distancia del origen al punto 1 2( , ,... )nP x x x= .

24
b. La dirección de V se da en términos de los cosenos de los ángulos que la
recta que contiene al vector de posición forma con cada uno de los semiejes
positivos coordenados. Estos cosenos se llaman cosenos directores de V .
Definición 2.4
Dado un vector = 1 2, ,..., nV x x x de nE , entonces:
a. El módulo de V es 2
1
n
i
i
V x=
=
b. La dirección de V está dada por cos( ) ii
x
V = , 0, , 1,2,..,i i n =
Actividad en clase: Ilustrar los casos de 2E y
3E y casos particulares.
2.2 ALGEBRA VECTORIAL
Sea *V el conjunto de los vectores. Es posible dotar a
*V de algunas leyes de
composición para construir un álgebra de vectores. Estas operaciones se definen
tanto en el sentido geométrico de los vectores como en el sentido algebraico, sin
embargo, las demostraciones de las propiedades se hacen algebraicamente.
2.2.1 Igualdad
a. La igualdad geométrica de vectores ya fue definida: dos vectores A y B son
iguales,A B= , si y sólo si tienen la misma magnitud y la misma dirección, es decir
A B= si y sólo si =A B y =dirA dirB

b. En forma algebraica, los vectores = 1 2, ,..., nA a a a y = 1 2, ,..., nB b b b de
nE son iguales si y sólo si =i ia b para 1,2,..., .i n=
La igualdad de vectores es una relación de equivalencia lo que significa que
cumple ser reflexiva, simétrica y transitiva. Para , y A B C vectores,
a. Reflexiva: =A A
b. Simétrica: Si A B= entonces =B A
c. Transitiva: Si A B= y =B C entonces =A C
2.2.2 Adición
a. Método geométrico: Dados A , *B V . Sea 0 1PP el segmento orientado que
representa al vector A , el vector B se puede representar por medio de un
segmento orientado que tenga su origen en 1P y su extremo en 2P . Se define el
vector suma A B+ como el representado por el segmento orientado 0 2PP . Esta
se conoce como la regla del polígono para sumar vectores. (fig. 2.3)
P1 P2
P0
AA+B
B
Figura 2.3. Adición de vectores
Existe un método análogo, llamado regla del paralelogramo, el cual usted debe
describir.
b. Método algebraico: Dados los vectores de nE , = 1 2, ,..., nA a a a y
= 1 2, ,..., nB b b b , el vector A B+ está dado por:
+ = + + +1 1 2 2, ,..., n nA B a b a b a b

26
Teorema 2.1
*,V + es un grupo abeliano. Este enunciado es equivalente a decir que la
adición de vectores es una OBI* y que cumple las siguientes propiedades :
Para todoA , B , *C V :
a. Conmutativa: A B B A+ = + .
b. Asociativa: ( ) ( )A B C A B C A B C+ + = + + = + + .
c. Neutro: 0 0A A A+ = + = , siendo0 el vector nulo.
d. Inverso: ( ) 0A A+ − = de donde A− es el inverso de A .
Demostración de la propiedad b. para vectores en3E
Sean = = =1 2 3 1 2 3 1 2 3, , , , , , , ,A a a a B b b b C c c c
Entonces + + = + + 1 2 3 1 2 3 1 2 3( ) , , , , , ,A B C a a a b b b c c c
+ + = + + + +1 1 2 2 3 3 1 2 3( ) , , , ,A B C a b a b a b c c c por suma de vectores
+ + = + + + + + +1 1 1 2 2 2 3 3 3( ) , ,A B C a b c a b c a b c por suma de vectores
+ + = + + + + + +1 1 1 2 2 2 3 3 3( ) ( ), ( ), ( )A B C a b c a b c a b c por propiedad asociativa
en la suma de reales
+ + = + + + + 1 2 3 1 1 2 2 3 3( ) , , , ,A B C a a a b c b c b c
( ) ( )A B C A B C+ + = + +
Actividad para el estudiante: Ilustrar geométricamente las propiedades
anteriores.

Teorema 2.2
La desigualdad triangular:
Para todo A , *B V , A B A B+ +
Actividad en clase: Demostrar el teorema 2.2.
La existencia de inversos permite definir la diferencia de vectores: para todo A ,
*B V :
( )A B A B− = + −
Es decir, la diferencia entre A y B es la suma de A y el inverso de B .
a. En forma geométrica si 0 1PP es el segmento dirigido que representa a A y
0 2PP el segmento que representa a B , entonces el segmento dirigido 2 1PP
representa a A B− .
P1
P2P0
AA-B
B
Figura 2.4. Diferencia de vectores
b. En forma algebraica, si = 1 2, ,..., nA a a a y = 1 2, ,..., nB b b b entonces
− = − − −1 1 2 2, ,..., n nA B a b a b a b

28
Teorema 2.3
A partir de las propiedades de grupo abeliano de *,V + se obtienen las
siguientes propiedades de la diferencia.
Para todo A , *B V se cumplen:
a. ( )A B A B− + = − −
b. si A B= entonces A B− = −
c. 0 A A− = −
d. 0A A− =
La adición de vectores permite obtener las componentes de un vector en nE del
cual se conocen las coordenadas de su punto inicial y de su punto final. Si V es
un vector cuyo punto inicial es =1 1 2( , ,..., )nP x x x y cuyo punto final es
=2 1 2( , ,..., )nP y y y entonces los vectores de posición de 1P y 2P son,
respectivamente, =1 1 2, ,..., nOP x x x y =2 1 2, ,..., nOP y y y
Por adición de vectores,
1 1 2 2OP PP OP+ =
de donde se obtiene que
1 2 2 1PP OP OP= −
es decir,
= − − −1 2 1 1 2 2, ,..., n nPP y x y x y x
Ilustración:
Si 1 (3,4, 2,5)P = − y 2 (1, 7,4,8)P = − , son dos puntos de 4E , el vector 1 2PP es,
= − = − −1 2 2 1 2, 11,6,3PP OP OP

2.2.3 Producto de un vector por un escalar
Se define una operación binaria externa en vectores por medio de así:
Para todo a y todo *A V el producto de a y A es el vector aA .
a. En sentido geométrico aA tiene las siguientes características,
• aA a A= , donde a representa al valor absoluto de a .
• aA tiene la misma inclinación que A y su sentido concordante o discordante
con A según a sea positivo o negativo.
En la fig. 2.5 se ilustran los vectores A , 3A y 2A− .
A
3A
-2A
Figura 2.5. Producto de un vector por un real
b. En sentido algebraico, si = 1 2, ,..., nA x x x es un vector de nE y a
entonces: = 1 2, ,..., naA ax ax ax

30
Teorema 2.4
Para todos A , *B V y todos a , b , se cumplen:
a. ( )a b A aA bA+ = +
b. ( )a A B aA aB+ = +
c. ( ) ( )ab A a bA=
d. 1A A= y 1A A− = −
e. 0 0A= y 0 0a =
Con estas propiedades {V*,+, aA} es un espacio lineal real.
Actividad para el estudiante: Probar estas propiedades e ilustrarlas
gráficamente.
Al vector aA se le llama múltiplo escalar de A , de donde resulta obvio que dos
vectores son paralelos si y sólo si uno es múltiplo escalar del otro.
Con esta idea en la mente, el vector A
A es paralelo a A por medio del escalar
1
A si 0A . Este vector se representa por AU y se denomina vector unitario en
la dirección de A .
Actividad en clase: Probar que el vector A
AU
A= es unitario.

2.2.4 Ejercicios
Ejercicios básicos.
1. Dados los vectores de 3E , = −6, 2,5U , = 3,0,5V y = −2,4, 9W , halle
a. +U V
b. +U V
c. − +U V W
d. − +3 3U U
e. − +3 5 4U V W
f. W
W
g. W
W
h. 2U W
V
2. Halle escalares a y b tales que
a. = +,3 2,a a b
b. =4, 2,3b a
c. + = −, 2,6a a b b
d. −
− = +5
4,2, 3, ,a b a b ab
3. Si el punto inicial del vector = − −2,4, 1X es (2, 1,4)P − , halle su punto final.
Si el punto final del vector = 2,0,7Y es (2,0, 7)Q − , halle su punto inicial.
4. El vector de posición de una partícula móvil es = −2 3( ) 3,4 ,R t t t siendo t el

32
tiempo. Halle el desplazamiento de la partícula en el intervalo de tiempo 1,7 .
5. Demuestre que la suma de los cuadrados de los cosenos directores de un
vector en nE es igual a la unidad.
6. Halle los cosenos directores de los vectores
a. = −1,1,1A
b. = − −7, 3, 5B
c. = −1,2,9, 3,5C
7. Para qué valores de t en reales los vectores = − −, , 1A t t t y = +,10 ,6B t t
de 3E tienen un ángulo entre ellos.
8. Dados los puntos (3, 1,6)A= − y (5,4,2)B = de 3E , halle las coordenadas de
un punto C tal que AC sea el doble AB y B esté entre A y C .
9. Determine un vector de 3E cuya magnitud sea igual a la de = −7, 5,12A y
cuya dirección sea la de = − −6,9, 10B .
10. Usando vectores verifique que los puntos de 2E (4, 2)− , (10,8) , ( 6,5)− y
(0,15) son los vértices de un paralelogramo.
11. Un vector de 3E tiene magnitud 2 y dirección de modo que su ángulo con el
eje x es 3 y con el eje y es 4 , halle las componentes del vector.
12. Demuestre que si =1 1 1,A x y y =2 2 2,A x y son vectores de 2E , entonces
1A es paralelo a 2A si y solo si 1 2 2 1 0x y x y− = .
13. Halle los vectores de 4E que siendo unitarios son paralelos a 1,2,2,0

Ejercicios avanzados
1. Sean A , B y C puntos colineales. Si C divide al segmento AB en una razón
a
b, es decir =
AC a
CB b, demuestre que
bOA aOBOC
a b
+=
+ siendo O un punto
exterior a la recta.
2. Halle para qué valores reales de t y u , los puntos1(2,3)P , + +2(1 ,1 )P t u y
3(2 ,2 )P t u son colineales.
3. Usando vectores demuestre que el baricentro de un triángulo divide cada
mediana en la relación 2:1.
4. Si (2,5)A= , ( 1,3)B = − y (7,4)C = son tres vértices de un paralelogramo de
2E , usando vectores halle las coordenadas del cuarto vértice (dos respuestas)
5. Pruebe que si , ,a b c no son todos nulos, los vectores = , ,A a b c y
= , ,B ka kb kc tienen la misma dirección si 0k y dirección contraria si 0k
( k ).
6. Halle un vector de 4E que tenga su punto inicial en el punto medio del
segmento entre los puntos (2,5,0, 4)− y ( 6,7, 2,2)− − y su punto final en el
punto final del vector de posición −1,2, 3,8 .
Antes de definir otras operaciones con vectores, se hace necesario introducir unos
conceptos básicos del álgebra lineal.

34
2.3 CONCEPTOS DEL ÁLGEBRA LINEAL.
2.3.1 Dependencia lineal
Definición 2.5
Dado un conjunto de vectores 1 2, ,..., rA A A de V* y un conjunto de números
reales i 1,...,i r= se llama vector combinación lineal (C.L) de los iA
1,...,i r= a cualquier vector obtenido como 1
r
i i
i
A=
para cualquier conjunto de
valores de los i .
De otro modo, un vector combinación lineal es la suma de múltiplos escalares de
los iA , 1,...,i r= . Los i se llaman componentes escalares de la combinación
lineal y los iA componentes vectoriales.
Ilustración:
Dados los vectores = 1,2,3A , = − −4, 3, 1B , = − −5, 3,5C y = −2,1,6D .
a. Una combinación lineal de , , A B C yD es − − = − + −3,4, 22 2 3 6A B C D
b. El vector D se puede escribir como combinación lineal de , A B y C como
141 16 67
129 129 129D A B C= − +
El vector nulo puede expresarse como C.L. de cualquier conjunto de vectores. Lo
más simple es que 1 20 0 0 ...0 rA A A= + + , la cual se denomina C.L. trivial.
Todo vector es C.L. de si mismo: 1A A=

Definición 2.6
Dado un conjunto de vectores *
1 2, ,..., rS A A A= de *V ; si ocurre que la
combinación lineal 1
0r
i i
i
A=
= se da únicamente en el caso trivial, es decir,
cuando todos los 0i = entonces se dice que los iA son linealmente
independientes (L.I) o que*S es libre o que los vectores son libres. Pero si ocurre
que la C.L. se presenta para el caso no trivial (o sea sin que todos los i tengan
que ser0 ) entonces los iA son linealmente dependientes (L.D) o el conjunto
*S es ligado o los vectores son ligados entre si.
Ilustración: Se puede verificar que los vectores de 3E = −1,3, 2A , = 3,1,1B
y = −5, 1,4C son L.D ya que existen escalares ,a b y c diferentes de cero tales
que 0aA bB cC+ + = .
Una de las infinitas posibilidades es que 2, 4a b= − = y 2c = − . Efectivamente
2 4 2 0A B C− + − = .
El lector deberá encontrar otra solución.
Notas:
a. Hay que tener muy en cuenta que un conjunto de vectores es L.I si y sólo si la
única CL que produce el vector nulo es la trivial.
b. Un conjunto de vectores debe o bien ser L.I o bien L.D pues estos son
eventos mutuamente excluyentes.
c. Si *S A= y 0A , entonces *S es libre.
d. Si *0 S entonces
*S es ligado.

36
Actividad en clase: Justificar las proposiciones c. y d.
Teorema 2.5
a. Dos vectores son paralelos si y sólo si son L.D.
b. Dos vectores son no paralelos si y sólo si son L.I.
c. Tres vectores son coplanares si y sólo si son L.D.
d. Tres vectores son no coplanares si y sólo si son L.I.
Actividad en clase: Demostrar algunos de estos enunciados
Teorema 2.6
a. Un conjunto *S de vectores es L.D si y sólo si al menos un vector de
*S puede expresarse como CL del resto de vectores de *S .
b. Un conjunto *
1 2, ,..., mS A A A= de vectores de nE es L.D sim n , esto
equivale a decir que si *S es libre entonces
*S tienen a lo sumo n vectores.
Demostración del teorema 2.6 a.
Como este teorema es un bicondicional, demostremos uno de los condicionales:
Si el conjunto =*
1 2, ,..., nS A A A es un conjunto de vectores L.D, al menos un
vector es C.L. del resto.
Por la definición de vectores L.D:
1 1 2 2 ... 0n nA A A + + + = con al menos un 0i
Sin perder generalidad hagamos 1 0 , entonces por operaciones con vectores:
2 31 2 3
1 1 1
... nnA A A A
= − − − −

Sustituyendo los
+− 1
1
i por =, 2,3,...,j j n nos queda:
1 2 2 3 3 ... n nA A A A = − − − − , lo cual nos dice que un iA de *S se puede
expresar como C.L de los restantes vectores.
2.3.2. Ejemplos
Si { , ,AB C } es un conjunto de vectores L.I, pruébese que { , , A B A C B C+ + + }
también es L.I.
Solución:
Acudiendo a la definición de vectores L.I, se debe cumplir que:
1 2 3( ) ( ) ( ) 0A B A C B C + + + + + =
solo si 1 2, y 3 son cero.
Por las propiedades de espacio vectorial de *V
1 1 2 2 3 3 0A B A C B C + + + + + =
También, 1 2 1 3 2 3( ) ( ) ( ) 0A B C + + + + + =
y como , A B y C son L.I, entonces
1 2 0 + =
1 3 0 + =
2 3 0 + =
al resolver este sistema se llega a que la única solución es si 1 2 3 0 = = = , lo
que implica que { , , A B A C B C+ + + } es L.I.
2. Encuentre con que condiciones los vectores de 2E , ,a b y + −,a b a b son
L.D.

38
Solución:
Dos vectores L.D son paralelos, entonces se debe cumplir que
= + −, ,a b k a b a b porque dos vectores son paralelos si uno es múltiplo
escalar del otro.
De ahí que ( )a k a b= + y ( )b k a b= − .
De la primera ecuación a
ka b
=+
a b − , reemplazando en la segunda
( )a
b a ba b
= −+
; 2 2 2 0a b ab− − = (1 2)a b= que es la condición pedida.
2.3.3 Base de un En
Definición 2.7
Se llama base de nE a un conjunto
*B no vacío que cumple que:
a. *B tiene exactamente n vectores
b. Los vectores de *B son L.I.
De este modo cualquier vector de nE es una CL de los elementos de
*B . En
álgebra lineal esto se expresa diciendo que *B es un generador de
nE o que
*B genera a nE .
Teorema 2.7
Si *B es una base de
nE , entonces cualquier vector nEV es una CL única de
la base.

Definición 2.8
Se llama la base canónica de nE al conjunto *
1 2, ,..., nB U U U= donde
= = =1 21,0,...,0 , 0,1,...,0 ,..., 0,0,...,1nU U U
La base canónica es la base más simple y más usada de un nE .
En el caso particular de 2E , la base canónica es ,i j con = 1,0i y = 0,1j .
Como vectores de posición i y j van asociados a los ejes coordenados x y y
(figura 2.6). Cualquier vector ,x y de 2E se puede escribir como CL de i y j :
= +V xi y j
X
Y
P(x,y)
iyjj
xi V
V=<x,y>=xi+yj
Figura 2.6. Base canónica en E2
Los vectores xi y y j se llaman componentes ortogonales de V .
En 3E , la base canónica es , ,i j k siendo = 1,0,0i , = 0,1,0j y
= 0,0,1k , los cuales van asociados a los ejes ,x y y z cuando se toman como
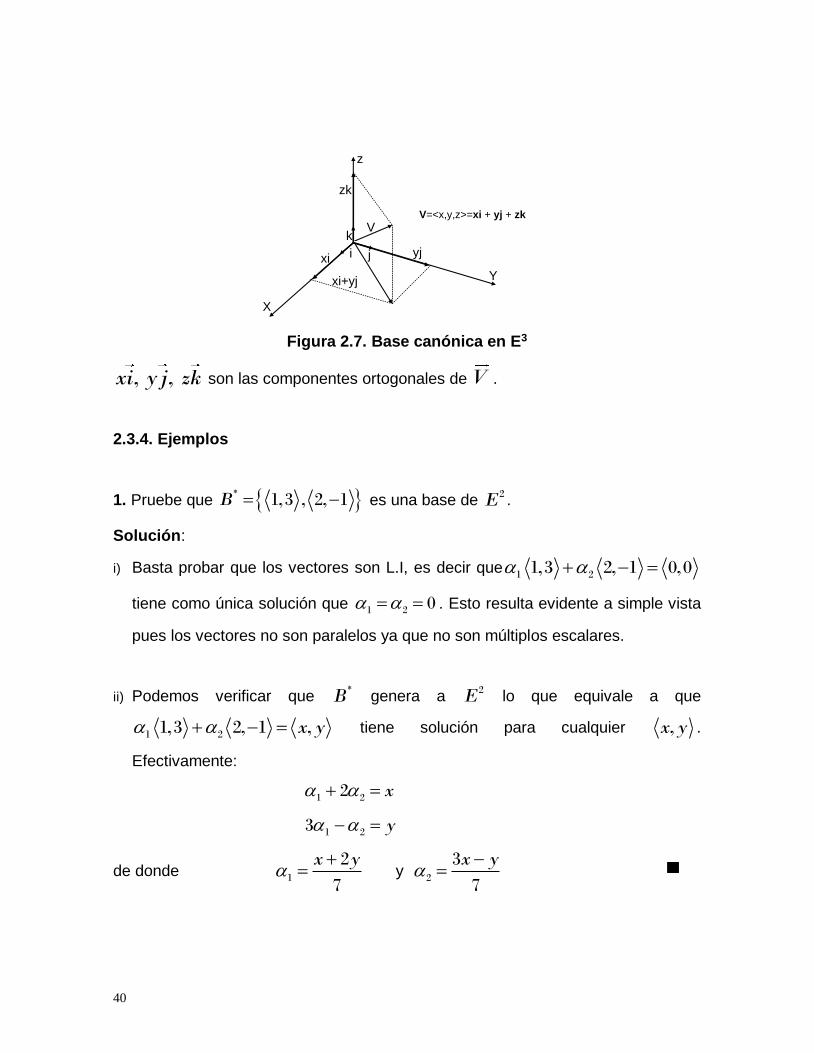
vectores de posición. Todo vector , ,x y z de 3E es una CL de ,i j y k :
= + +V xi y j zk
40
z
zk
xi
xi+yj Y
X
i j
kV
yj
V=<x,y,z>=xi + yj + zk
Figura 2.7. Base canónica en E3
, , xi y j zk son las componentes ortogonales de V .
2.3.4. Ejemplos
1. Pruebe que = −* 1,3 , 2, 1B es una base de 2E .
Solución:
i) Basta probar que los vectores son L.I, es decir que + − =1 21,3 2, 1 0,0
tiene como única solución que 1 2 0 = = . Esto resulta evidente a simple vista
pues los vectores no son paralelos ya que no son múltiplos escalares.
ii) Podemos verificar que *B genera a
2E lo que equivale a que
+ − =1 21,3 2, 1 ,x y tiene solución para cualquier ,x y .
Efectivamente:
1 22 x + =
1 23 y − =
de donde 1
2
7
x y
+= y 2
3
7
x y
−=

2. Pruebe que = − −* 3,0,5 , 1,4,2 , 7, 3,4B es una base de 3E .
Solución:
i) Para probar que *B es libre, se plante la CL igual al vector nulo:
+ − + − =1 2 33,0,5 1,4,2 7, 3,4 0,0,0
de aquí se obtiene:
1 2 33 7 0 − + =
2 34 3 0 − =
1 2 35 2 4 0 + + =
al resolver este sistema para 1 2, y 3 se encuentra que que 1 2 3 0 = = =
es la única solución lo que significa que los vectores son L.I.
ii) Podemos verificar qque *B genera a
3E ale establecer la CL para cualquier
vector , ,x y z de 3E
= + − + −, , 3,0,5 1,4,2 7, 3,4x y z a b c lo que equivale a:
3 7x a b c= − +
4 3y b c= −
5 2 4z a b c= + +
la solución de este sistema para ,a b y c arroja que
22 18 25
59
x y za
− − +=
15 23 9
59
x y zb
+ −=
20 11 12
59
x y zc
+ −=

42
Es decir que ,a b y c existen para cualquier valor de ,x y y z , por lo tanto se
puede encontrar la CL de *B para cualquier vector de
3E . Por ejemplo, para
−
= = =15 29 19
59 59 591,1,1 , , a b c
En efecto: −
= + − + − 15 29 19
59 59 591,1,1 3,0,5 1,4,2 7, 3,4
3. Dado el conjunto de vectores de 2E = − − −* 1, 1 , 2,2 , 1,1B
a) Verifique si *V es una base de
2E .
b) Exprese el vector −1,1 como una combinación lineal de *B de modo que la
suma de los soportes escalares de la combinación lineal sea 1.
Solución:
a) *B no puede ser una base de
2E ya que contradice la definición 2.7 que dice
que una base de nE tiene n vectores.
b) Aunque *B no sea base es posible expresar el vector −1,1 como C.L. de
*B .
Con la condición dada.
− = − − + − +1,1 1, 1 2,2 1,1a b c
Con 1a b c+ + =
De esto se obtiene el sistema
2 1a b c− − + = − (1)
− + + =2 1a b c (2)
1a b c+ + = (3)
Cuya solución es 1 4a c= = y 1 2b = .

Definición 2.9
Dada una base de nE , *
1 2, ,..., nB B B B= :
a) Si ocurre que los elementos de *B son ortogonales entre si, entonces se
dice que *B es una base ortogonal.
b) Si los elementos de *B son vectores unitarios, es decir 1iB = para
1,2,3,...,i n= , entonces se dice que la base está normalizada.
c) *B es una base ortonormal si cumple las dos condiciones anteriores.
La base canónica definida antes es el ejemplo más claro de una base ortonormal.
2.3.5 Ejercicios
1. Sean los vectores de posición de los puntos 1 2,P P y 3P en 2E , = +1 2 3OP i j ,
= +2 4OP i y j y =3 5OP i . Halle analíticamente el valor de y de modo que
1 2, P P y 3P sean colineales.
2. En cada caso verifique si el conjunto de vectores dados es L.I. o L.D.
a. =* 1,3 , 2,8A
b. = − −* 6,4,2 , 5, 3,16B
c. = − −* 3,7,12 , 6,1, 5 , 3,1,0C
d. = − − −* 1,3, 1 , 6, 2,5 , 5, 5,6D
e. = −* 1,2,3,4 , 0,1,3,7 , 2,0, 1,10E
3. En cada caso verifique si el conjunto dado es una base de nE :
a. =* 1,3 , 3,1B en 2E

44
b. =* 1,2,3 , 3,2,1 , 2,3,1B en 3E
c. =* 1,1,2 , 2,2,3 , 3,3,3B en 3E
d. = − − −* 5,3,1 , 1,0, 1 , 7,3, 4B en 3E
4. Si ,A B es una base de 2E , muestre que ,A B kA+ también es una base
de 2E para cualquier escalar k .
5. Dados los vectores de 3E = 1,1,4A , = −1, 1,0B y = −0,2, 2C ,
demuestre que son L.I. y expresar el vector = 3,5,2D como su combinación
lineal.
6. Dados los vectores de 3E : = 1,2,3A , = − −4, 3, 1B , = − −5, 3,5C ,
= −2,1,6D
Halle:
a. D como combinación lineal de ,A B y C .
b. A como combinación lineal de 3 y 2B D .
c. C como combinación lineal de + −, A B D A y A D+ .
d. Escalares a y b tales que ( ) ( ) 0a A B b C D+ + + =
7. Pruebe que si A , B , *C V son L.I., entonces
a. Los vectores 2 , 3 2A B C A B C+ + + − y 4A B C+ + son L.D.
b. Los vectores + −, A B A C yB C+ son L.I.
8. . Sean = =1,1,1 , 0,1,1A B y = 1,1,0C vectores de 3E
a. Muestre que , A B y C son L.I.
b. Halle un vector D tal que , A B y D sean L.D.
c. Halle un vector unitario que sea C.L. de , A B y C

10. Pruebe que el vector nulo no puede ser parte de una base de nE .
11. Pruebe que si 1m + vectores de nE son L.I, entonces m vectores de estos
también son L.I y que si m vectores son L.D entonces 1m + también son L.D.
12. Sean = − = −1, 1,2 , 3,1, 4A B y = − −2, 3, 1C . ¿Será posible expresar a
A como C.L de B y C ?
13. ¿Para qué valores de , los vectores = − =1, , 1 , 2 ,5,3A B y
= 4 ,1,0C son L.I.?, ¿y L.D?
13. Halle el valor de t para que en cada caso el conjunto de vectores sea L.D:
a) − −2, 7 , , 3t
b) −2,1,0 , 3, 5,2 , 1,4, t
2.4 OTRAS OPERACIONES CON VECTORES
2.4.1 Ángulo entre dos vectores
Para determinar el ángulo entre dos vectores de nE no paralelos y diferentes del
vector nulo, se hacen coincidir sus puntos iniciales. El ángulo es entonces el de
menor medida que forman las rectas que contienen a los dos vectores.
Teorema 2.8
Sean = 1 2, ,..., nA x x x y = 1 2, ,..., nB y y y dos vectores de nE no paralelos y
no nulos, el ángulo (0, ) entre A y B está dado por :

46
1cos( )
n
i i
i
x y
A B ==
Actividad en clase: Probar el teorema anterior en 2E .
Ilustración: El ángulo entre los vectores de 3E = 7,3,5A y = −2,4,1B es
− − + + =
1 14 12 5cos
83 21
− = =
1 3cos 85.9
1743
2.4.2 Producto interior de vectores
A continuación se va a definir una operación binaria entre vectores que da como
resultado un escalar. Esta operación se conoce como producto interior o producto
punto euclidiano o bien producto escalar.
Definición 2.10
Sean dos vectores de nE , = 1 2, ,..., nA x x x y = 1 2, ,..., nB y y y . El producto
interior deA y B es el número real simbolizadoA B• y definido como:
1 1 2 2
1
...n
i i n n
i
A B x y x y x y x y=
• = = + + +
Si 0A= ó 0B = , 0A B• =
A partir de la definición anterior y el teorema 2.9 se puede obtener que:
cos( )A B A B • =

La expresión anterior se conoce como la forma geométrica del producto interior y
establece que este producto es invariante respecto al sistema de referencia ya que
el resultado es el mismo aunque se cambie el sistema de referencia o, inclusive,
aunque no haya ninguno, es decir, el producto interior se puede obtener para todo
par de vectores A , B de *V
Teorema 2.9
El producto interior cumple las siguientes propiedades para todo A, B y *C V
y todo escalar ,r s :
a. Simetría: A B B A• = •
b. Bilinealidad: esta propiedad incluye dos partes,
i) • + = • + •( )A B C A B A C
+ • = • + •( )A B C A C B C
ii) ( )r A B rA B A rB• = • = •
c. Positividad definida: 0A A• y 0A A• = sólo si 0A=
d. 0 0A• =
e. ( ) ( ) ( )rA sB rs A B• = •
Actividad en clase: Demostrar algunas de estas propiedades.
Teoremas 2.10
A partir de la definición y las propiedades del producto interior se puede concluir
que:
a. La magnitud de cualquier vector *A V se puede expresar como
A A A= • o también 2
A A A= •

48
b. Si 0A y 0B entonces 0A B• = si y sólo si A y B son
perpendiculares.
c. • A B A B . Esto se conoce como la desigualdad de Cauchy-Schwarz.
d. Si = 1 2, ,..., nV x x x es un vector de 0nE − y 1 2, ,..., nU U U es la base
canónica denE entonces los cosenos directores de V están dados como
cos( ) ii
V U
V
•=
Actividad en clase: Demostrar este teorema.
El significado físico más simple del producto interior se relaciona con el trabajo
mecánico realizado por una fuerza F que desplaza un objeto en línea recta un
r . El trabajo de esta fuerza es = •T F r
Nota: Con la definición de producto punto una base *
1 2, ,..., nB B B B= de nE es
ortonormal si se cumple:
0
1i jB B
• =
i j
i j
=
Ejemplos
1. Usando el producto interior pruebe que si a y *A V entonces
aA a A=
Solución:
aA aA aA= • según el teorema 2.10 a)
2a A A= • por la propiedad 2.9 e)

= a A A a A• = .
2. Demuestre la desigualdad triangular: para todo A ,*B V A B A B+ +
Solución:
Del teorema 2.10 a), 2
( ) ( )A B A B A B+ = + • +
por propiedad de bilinealidad, A A A B B A B B= • + • + • + •
Por propiedad de la simetría, 2( )A A A B B B= • + • + •
y de nuevo el teorema 2.10 a), = + • +2 2
2( )A A B B
por la desigualdad de Cauchy-Schwarz
( )+ = + • + + +2 2 2 2 2
2 2A B A A B B A A B B
Es decir, ( )+ +22
A B A B
como A B+ y A B+ son números positivos,
A B A B+ + .
3. Dados A , B y * 0C V − de modo que A B⊥ y A C⊥ , demuestre que
A es perpendicular a B C + para todo y .
Solución:
Puesto que A B⊥ y A C⊥ se cumple que
0A B• = y 0A C• =
Ahora, si el producto interior entre A y B C + es cero, estos vectores son
perpendiculares, por tanto
( ) ( ) ( )A B C A B A C • + = • + • por las propiedades del producto interior.
Al reemplazar en esta ecuación que 0A B• = y 0A C• = :
50
( ) 0A B C • + = independiente de que valores tomen y y la proposición
queda demostrada.
2.4.3 Vector proyección
Un significado del producto interno lo da la proyección de un vector sobre otro.
Definición 2.11
Sean *, 0A B V − dos vectores no paralelos y el ángulo entre ellos. Si A y
B tienen el mismo punto inicial, se llama vector proyección de A sobre B ,
escrito A BP , al vector cuyo punto inicial es el punto inicial común y cuyo punto
final es el pie del segmento perpendicular trazado desde el punto terminal de A a
la recta que contiene a B .
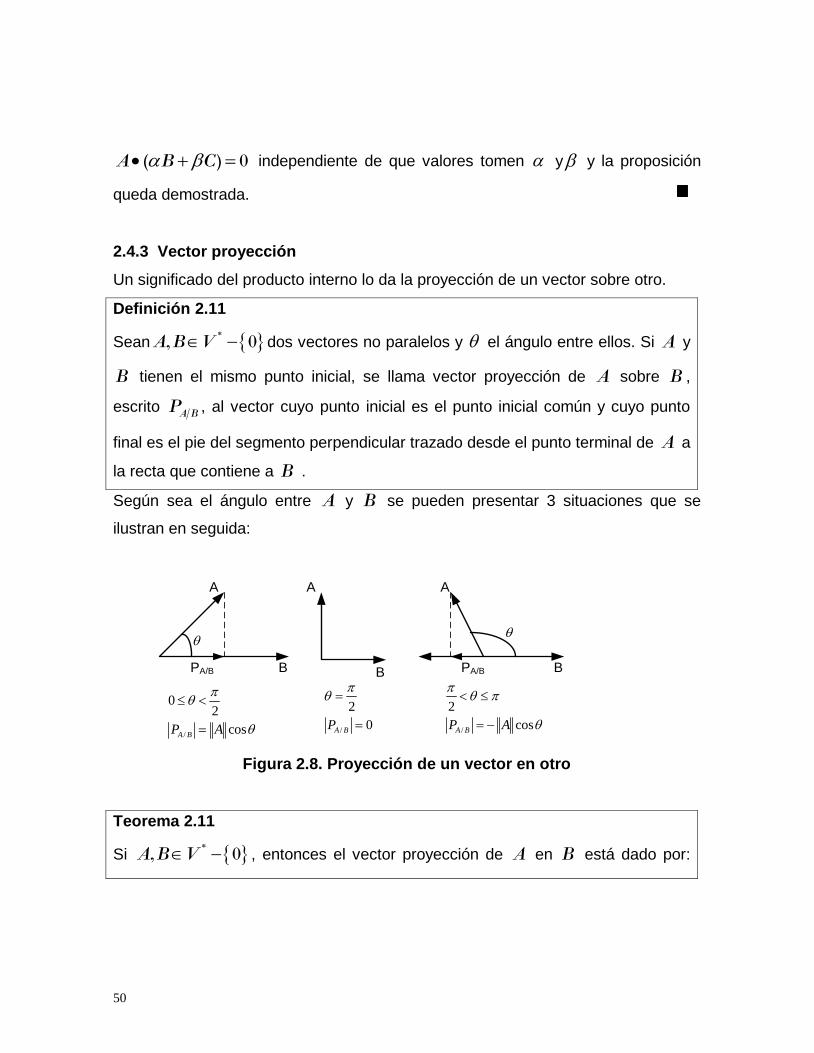
Según sea el ángulo entre A y B se pueden presentar 3 situaciones que se
ilustran en seguida:
A
B
AA
B BPA/BPA/B
/
02
cos
=A BP A /
2
0A BP
=
= /
2
cos
= −A BP A
Figura 2.8. Proyección de un vector en otro
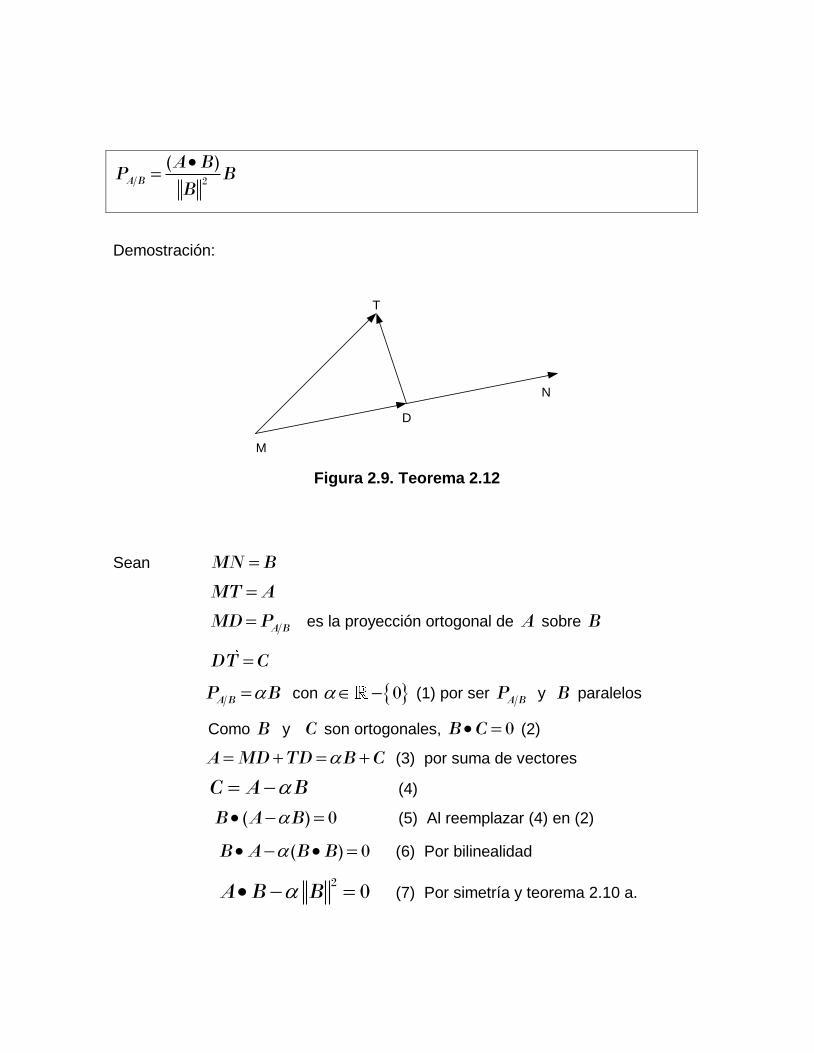
Teorema 2.11
Si *, 0A B V − , entonces el vector proyección de A en B está dado por:
2
( )A B
A BP B
B
•=
Demostración:
T
N
D
M
Figura 2.9. Teorema 2.12
Sean =MN B
=MT A
= A BMD P es la proyección ortogonal de A sobre B
DT C=
A BP B= con − 0 (1) por ser A BP y B paralelos
Como B y C son ortogonales, 0B C• = (2)
= + = +A MD TD B C (3) por suma de vectores
C A B= − (4)
( ) 0B A B• − = (5) Al reemplazar (4) en (2)
( ) 0B A B B• − • = (6) Por bilinealidad
2
0A B B• − = (7) Por simetría y teorema 2.10 a.

52
2
A B
B
•= (8)
2A B
A BP B
B
=
(9) al reemplazar (8) en (1)
Al número real dado por cos( )A se le denomina proyección escalar de A
sobre B . De este modo se puede decir queA B• es el producto entre la
proyección escalar de Asobre B y el módulo de B o entre la proyección escalar
de B sobre A y el módulo de A .
Ejemplo
Dados = 1,2,3A y = 4,5,6B vectores de 3E , exprese el vector A B+ como
CL de A BP y B AP .
Solución:
Del teorema 2.11,
2
( )A B
A BP B
B
•= y
2
( )B A
A BP A
A
•=
la combinación lineal queda:
1 2A B B AA B rP rP+ = + con 1r y 2r
1 22 2
( ) ( )A B A Br B r A
B A
• •= +
Para que esta ecuación sea cierta,
1 2
( )1
A Br
B
•=
y 2 2
( )1
A Br
A
•=

con lo que,
= =•
2
1
77
32
BrA B
Y = =•
2
2
14
32
ArA B
y así: 77 14
32 32A B B AA B P P+ = +
2.4.4 Producto vectorial
El producto vectorial, también llamado producto exterior o producto cruz, tiene
importantes aplicaciones en la mecánica en tres dimensiones. Esta operación es
específica para vectores en tres dimensiones y no se generaliza en forma natural
para dimensiones mayores.
Definición 2.12
Sean = 1 1 1, ,A x y z y = 2 2 2, ,B x y z vectores de 3E ; el producto vectorial deA
y B es una operación binaria interna que se representa
A B y se define como:
= − − −1 2 2 1 2 1 1 2 1 2 2 1, ,A B y z y z x z x z x y x y
Nota:
Mediante el uso de determinantes se puede representar el producto exterior como
un pseudo determinante de tercer orden que debe desarrollarse por la primera fila:

54
= = − +1 1 1 1 1 1
1 1 1
2 2 2 2 2 2
2 2 2
i j ky z x z x y
A B x y z i j ky z x z x y
x y z
= − + − + −1 2 2 1 2 1 1 2 1 2 2 1( ) ( ) ( )y z y z i x z x z j x y x y k
Teorema 2.12
El producto vectorial cumple las siguientes propiedades:
Para todo , A B y 3C E y todo número real ,a b ,
a. Anticonmutativa: ( )A B B A = −
b. Antiasociativa: ( ) ( )A B C A B C
c. Distributiva respecto a la suma: ( )A B C A B A C + = + y
( )A B C A C B C+ = +
d. ( ) ( ) ( )a A B aA B A aB = =
e. = ( )aA bB ab A B
f. 0A A =
g. 0 0 0A A = =
Actividad para el estudiante: demostrar estas propiedades
Se puede establecer que la forma geométrica del producto vectorial de dos
vectores A y B de 3E tiene las siguientes características:
a. Su magnitud está dada por ( )A B A B sen = , donde [0,] es el
ángulo entre A y B .
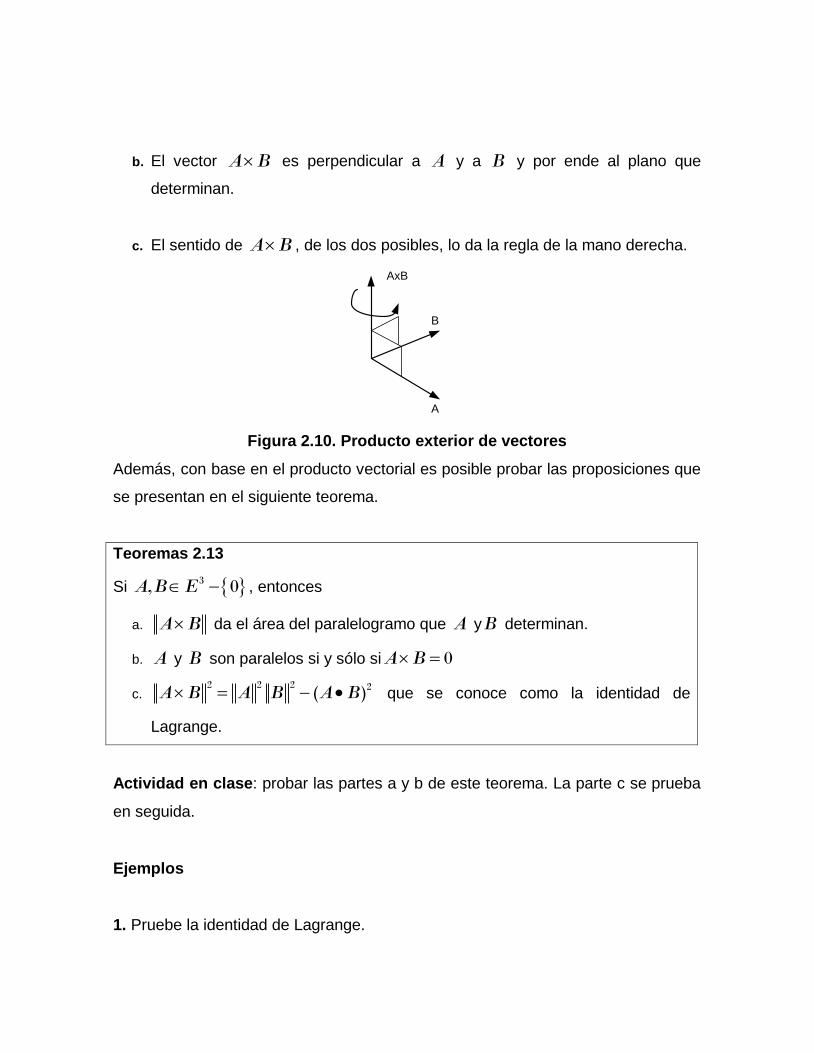
b. El vector A B es perpendicular a A y a B y por ende al plano que
determinan.
c. El sentido de A B , de los dos posibles, lo da la regla de la mano derecha.
AxB
B
A
Figura 2.10. Producto exterior de vectores
Además, con base en el producto vectorial es posible probar las proposiciones que
se presentan en el siguiente teorema.
Teoremas 2.13
Si 3, 0A B E − , entonces
a. A B da el área del paralelogramo que A yB determinan.
b. A y B son paralelos si y sólo si 0A B =
c. 2 2 2 2( )A B A B A B = − • que se conoce como la identidad de
Lagrange.
Actividad en clase: probar las partes a y b de este teorema. La parte c se prueba
en seguida.
Ejemplos
1. Pruebe la identidad de Lagrange.

56
Solución:
Partiendo del lado izquierdo:
2 2( )A B A B sen =
2 2 2A B sen =
2 2 2(1 cos )A B = −
2 2 2 2 2( cos )A B A B = −
= − •2 2 2( )A B A B
2. Dados , A B y3C E los cuales cumplen que
a) 4 2 0A B C+ − = y
b) 2 3 2 0A B C− + =
Entonces pruebe que 0A B =
Solución:
De la parte a) y por propiedades de la adición
4 2C A B= +
reemplazando esto en b)
2 3 8 4 0A B A B− + + =
o sea, 10 0A B+ =
también 10B A= −
de aquí se puede concluir que AyB son paralelos y si dos vectores de 3E son
paralelos su producto exterior es el vector nulo , por eso 0A B =
3. Halle una base ortonormal de 3E diferente de la canónica.
Solución:

Escojamos al azar 2 vectores de 3E que sean ortogonales, digamos = 1,2,3A
y = −4, 2,0B .
Un tercer vector ortogonal a ambos es = − = −6,12, 10 2 3,6, 5A B . Por tanto
= 1,2,3A , = −4, 2,0B y = 3,6,5C son una base ortogonal de 3E .
Los vectores unitarios = =1
1,2,314
A
AU
A, = −
14, 2,0
20BU y
= −1
3,6, 570
CU son la base pedida.
2.4.5 Triples productos
La algebrización de *V termina con la definición de los triples productos entre
vectores y los significados geométricos de éstos.
Definición 2.13
Sean , A B y C vectores de 3E .
a. Se llama triple producto escalar (o triple producto interior) de , A B y C al
número real dado por ( )A B C•
b. Se llama triple producto vectorial (o triple producto exterior) de , A B y C al
vector dado por ( )A B C
El triple producto escalar se puede expresar como un determinante de tercer
orden. Si = 1 1 1, ,A x y z , = 2 2 2, ,B x y z y = 3 3 3, ,C x y z son vectores de 3E ,
entonces

58
1 1 1
2 2 2
3 3 3
( )
x y z
A BxC x y z
x y z
• =
Teoremas 2.14
Los triples productos producen las siguientes propiedades:
a. ( ) ( ) ( )A B C B C A C A B• = • = •
b. ( ) 0A B C• = si y sólo si , A B y C son L.D (coplanares)
c. ( ) ( ) ( )A B C A C B A B C = • − • . Esta se conoce como la relación de
Gibbs.
Actividad en clase: demostrar los anteriores teoremas.
Cuando , A B y C no son coplanares, determinan un paralelepípedo cuyo
volumen está dado por el valor absoluto del triple producto escalar de los tres
vectores.
BxC
B
A
C
Figura 2.11. Triple producto escalar
Si es el ángulo entre A y ( )B C (figura 2.11), el volumen del paralelepipedo es
cos( )V A B C =

= • ( )A B C
Geométricamente el vector ( )A B C es un vector en el plano determinado por
B y C , es decir que ( )A B C , B y C son L.D. Esto se deduce de la relación
de Gibbs.
Ejemplos
1. Pruebe que los vectores = − = − −1,4,2 , 7,11, 2A B y = −5, 3,6C son
coplanares.
Solución:
Se sabe que tres vectores de 3E son coplanares si son L.D, por lo tanto, si
( ) 0A B C• = , los vectores son coplanares
−
• = − − = − − − − + + −
−
= − + −
=
1 4 2
( ) 7 11 2 (66 6) 4( 42 10) 2(21 55)
5 3 6
60 128 68
0
A BxC
2. Halle condiciones para ,a b y c de modo que los vectores de 3E
= =2 21, , , 1, ,A a a B b b y = 21, ,C c c sean linealmente independientes.
Solución:
Del teorema 2.14 b si ( ) 0A B C• = los vectores son L.D, por lo tanto, si
( ) 0A B C• los vectores son L.I, entonces
2
2 2 2 2 2 2 2
2
1
( ) 1
1
a a
A BxC b b bc b c ac ab ca ba
c c
• = = − − + + −

60
2 2 2
2
2
( ) ( )( ) ( )
( ) ( )( ) ( )( )
( )
( ) ( ) ( )
( )( )( )
b a c b a ab c b a
b a c b a ab c b a b a
b a c ab cb ca
b a b a c c a c
b a a c b c
= − + − − −
= − + − − − +
= − + − −
= − − − −
= − − −
Para que este resultado no sea cero es necesario que ,b a a c y b c que
son las condiciones pedidas.
2.4.6 Ejercicios
Ejercicios básicos.
1. Sean = − − = −1,2, 2 , 4,3, 5A B y = −0, 4,2C . Efectue las siguientes
operaciones:
a) A B
b) ( )A B C
c) ( )A B C+ •
d) ( )A B C+
e) ( ) ( )A B B C +
f) ( ) ( ) ( )A B C B B A C+ + − +
2. Demuestre que los vectores de 3E = = − + +2,3,0 , U V i j k y
= +3W i k no son coplanares y halle el volumen del paralelepípedo generado
por ellos.
3. Determine para qué valores de a los vectores de 3E = −, 2,1A a y

= −2 , , 4B a a son perpendiculares.
4. Sean *,A B V * de modo que =A a y =B b .
a. Demuestre que los vectores C aB bA= + y D bA aB= − son
perpendiculares.
b. Halle el valor del ángulo entre A y C sabiendo que
( ) /( )C aB bA a b= + +
5. Si = − = − −3,5, 3 , 1, 2,3A B y = −2, 1,4C vectores de 3E , halle el vector
proyección de B sobre 2A C− .
6. Sean = + −12 9 5A i j k y = + −4 3 5B i j k , encuentre un escalar p tal que
B pA− sea ortogonal a A .
7. Dados dos vectores de 3E , = 1,3,7A y = −4,6,2B , halle si es posible, un
vector P que sea C.L. de A y B y a la vez sea ortogonal a A .
8. Dados los vectores de 3E , = ,2,5A a y = −1,3,9B , halle el valor de a
para que A BP tenga como magnitud 91 y sentido opuesto a B .
9. Halle dos vectores de 2E perpendicular al vector +ai bj cuya magnitud sea
10 .
10. ¿Cuáles de las expresiones siguientes son indefinidas y por qué?
Para 3, , A B C E
a. A A A
b. A B C
c. ( )B B B
d. ( )A B C
e. ( )A B C•
f. ( )A B C •

62
g. ( ) ( )A A B B
h. ( ) ( )A B B C •
i. ( )A B C+ •
j. ( )A B C A B+ • +
11. Encuentre un vector de longitud 4 unidades que sea perpendicular al plano
definido por = 1,3,0A y = −0,3, 1B
12. Utilice el triple producto escalar para determinar si los vectores de 3E son
coplanares o no:
a. − − − −1, 1,9 , 0,1, 3 , 1,2,0
b. − −1, 1,1 , 1,0,2 , 1, 1,0
13. Muestre que si *, A B V son tales que A B+ es perpendicular a A B−
entonces =A B .
14. Si 3, 0A B E − , pruebe que
a. • =( ) 0A A B
b. ( ) 0A A B =
Ejercicios avanzados
15. Demuetre que si A y * 0B V − son ortogonales, entonces
2 2 2A B A B+ = +
16. Sean = 1,2A y = 3,4B vectores de 2E . Halle los vectores P y Q para
que se cumpla a la vez que , A P Q P= + es paralelo a B y Q es ortogonal a B .
17. Si = + − = + −2 3 , 3A i j k B i j k y = − +4 2C i j k , halle escalares a y b

tales que aA bB+ sea ortogonal a C y tenga magnitud 1 .
18. Si , A B y 3C E , pruebe que si se cumple a la vez que A B A C• = •
y A B A C = con 0A , entonces B C= , pero si solo se cumple una
condición, no necesariamente B C= .
19. Pruebe que para todo 3, A B E , entonces
a. ( ) ( ) 2( )A B A B A B− + =
b. + • =2 2 2 2
A B A B A B
20. Sean*, , A B C V con 0B y A BC A P= − , entonces pruebe que B y C
son ortogonales.
21. Demuestre que el volumen de un tetraedro que tiene como vértices los puntos
, , A B C y D está dado por ( ) /6V AB AC AD= • .
22. Si 3, , A B C E , demuestre la identidad de Jacobi:
( ) ( ) ( ) 0A B C B C A C A B + + =
23. Dados , , A B C y 3D E de modo que 3 ( ) 5 ( )D A C B C A B= − ,
• = • =2, 5A B A C y 4B C• = entonces exprese a C como combinación lineal
de , A B y D .
24. Si *, A B V son vectores unitarios, pruebe que + • =
2 2( ) 1A B A B .
25. Utilizando el producto interior pruebe que para a y *A V
=aA a A .
26. Muestre que si X Y X Y• = para dos vectores no nulos , X Y , entonces
Y kX= con − 0k .
27. Si , , X Y Z son tres vectores de 3E tales que X es perpendicular tanto a
Y como a Z , muestre que para , a b , X es perpendicular a aY bZ+ .

64
Ejemplos de repaso del capítulo
1. Sea = − 24, 3A E . Halle un vector B de 2E paralelo a A y tal que
4B = .
Solución:
Para que B sea paralelo a A , B tA= − 0t
y por la definición del producto de un escalar por un vector B t A= , de allí,
BtA
= y como 5A = se tiene que 4
5t = o
4
5t = .
De acuerdo con este resultado existen dos vectores que cumplen las condiciones
del problema:
1
16 12,
5 5B
−= y 2
16 12,
5 5B
−=
Nótese que 1 2 0B B+ = lo que indica que son vectores opuestos.
2. Dados ( 4,5)A − y (2,3)B puntos de2E , divida el segmento AB en la razón
3 2 .
Solución:
Sea ( , )C x y el punto divisorio sobre el segmento, entonces:
= + −4, 5AC x y y = − −2 ,3CB x y
como los puntos son colineales AC tCB=
es decir, + − = − −3
24, 5 2 ,3x y x y
de donde, 3
4 (2 )2
x x+ = − 2
5x
−=

y 3
5 (3 )2
y y− = − 19
5y =
entonces ( 2 5,19 5)C − es el punto que divide al segmento en la razón dada.
3. Dados = − +2 2A i j k y = + −3 4C i j k de 3E , halle,
a) Un vector B tal que A B C =
b) Un vector B tal que A B C = y 1A B• =
Solución:
a) Sea = + +1 2 3B b i b j b k el vector pedido. Según la hipótesis A B C = lo cual
equivale a que:
− = + −
1 2 3
2 1 2 3 4
i j k
i j k
b b b
o sea, − − + − + + + = + −3 2 3 1 2 1( 2 ) ( 2 2 ) (2 ) 3 4b b i b b j b b k i j k
Por igualdad de vectores
3 2
3 1
2 1
2 3
2 2 4
2 1
b b
b b
b b
− − =
− + =
+ = −
al resolver este sistema se encuentra que tiene infinitas soluciones una de las
cuales es = − −1,0, 3D . La solución más general es B D tA= + t (queda a
cargo del estudiante justificar lo anterior)
b) Del numeral a), A B produce el sistema
3 22 3b b− − = (1)
3 12 2 4b b− + = (2)
2 12 1b b+ = − (3)
y 1A B• = agrega la ecuación

66
1 2 32 2 1b b b− + = (4)
De (1), (2), (3) y (4) se logra que 1 2 31, 1b b b= = = − con lo que el vector pedido es
= − −B i j k
4. Si , , A B C y3D E , exprese el vector ( ) ( )A B C D como combinación
lineal de A y B .
Solución:
( ) ( ) ( ) ( )A B C D C D A B = − propiedad anticonmutativa
( ) ( )C D B A C D A B= − • − • por la relación de Gibbs.
Sean ( )C D B = •
( )C D A = − • pues el triple producto interior es un número
real, entonces
( ) ( )A B C D A B = + que es lo pedido.
4. Dados los vectores de 3E = ,2,5A a y = −1,3,9B , halle el valor de a de
modo que el vector proyección de A en B , A BP , tenga magnitud 91 y
sentido opuesto a B .
Solución:
• − + += = −
+ +
−= −
2
( ) 6 451,3,9
1 9 81
51 1,3,9
91
A B
A B aP B
B
a
y 51
91 9191
A B
aP
−= =

de aquí, 91 51 a= −
ó = − = −91 51 40a a ó 142a =
A BP tendrá sentido opuesto a B si A B• es negativo lo cual se cumple si
142a = .
6. Sean = − + = + −, 2 3A i j k B i j k y = − + +2 2C i j k vectores de
posición. Obtenga un vector de posición unitario OP C⊥ tal queP esté en el
plano determinado por A y B .
Solución:
Los vectores , A B y OP son coplanares y por lo tanto L.D. Sea , ,x y z un
vector paralelo a OP , entonces también es L.D con A y B y se cumple que
= − + − −, , 1, 1,1 2,3, 1x y z a b para diferentes valores reales de a y b .
Adicionalmente si OP C⊥ también ⊥ , ,C x y z y • − =, , 1,2,2 0x y z
De lo anterior se obtiene el sistema:
2x a b= − (1)
3y a b= − + (2)
z a b= − (3)
2 2 0x y z− + + = (4)
del cual se obtiene que = 6a b .
Como a y b tienen diferentes valores, se puede asumir 1b = y 2a = .
Con eso = −, , 4, 3,5x y z
y −
= =, , 4, 3,5
, , 5 2
x y zOP
x y z
o sea −= 2 2 3 2 2, ,
5 10 2OP
68
2.5 EJERCICIOS DE FINAL DE CAPÍTULO
2.5.1. Preguntas
1. ¿Geométricamente cómo se define un vector?
2. ¿Cuál es la interpretación geométrica del producto de un real por un vector?
3. ¿Cómo se halla un vector unitario en la dirección del vector A?
4. ¿Cuándo un conjunto de vectores es LI?
5. ¿Qué condiciones se requieren para que un conjunto de vectores sea base de
nE ?
6. ¿Cuándo tres vectores son L.D?
7. Cuál es la condición para que dos vectores de 3E sean:
a. Paralelos
b. Perpendiculares
8. ¿Qué tipo de operación es el producto vectorial en 3E ?
9. ¿A qué se le llama triple producto escalar?
10. ¿Cómo se halla el volumen de un paralelepípedo en términos del producto
escalar y del vectorial?
11. ¿Cómo se halla un vector perpendicular a A y a B simultáneamente?
12. ¿Qué aplicaciones tienen los vectores en la física?
2.5.2. Preguntas de falso y verdadero
Justifique si los enunciados siguientes son verdaderos o falsos.
a. Si A y − 0nB E son L.D, entonces todo par de vectores que se obtengan
como combinación lineal de A y B también serán L.D.

b. Para , , nA B C E se cumple que ( ) ( )A B C A B C• • = • •
c. Si en un conjunto de vectores no hay dos de ellos que sean paralelos,
entonces ese conjunto de vectores es L.I
d. Sean −3, , 0A B C E . Si A B⊥ y B C entonces A C⊥
e. No existe un valor de tal que los vectores − +3 , , 1 y
+ −10, 6,3 sean paralelos
f. Si −3, , 0A B C E y A B⊥ entonces ( ) 0A B C = .
g. − 0nA E , los vectores A y −A son L.D
h. Si −3, 0A B E son ⊥ s y de igual magnitud entonces = •A B A A
i. Para −, 0nA B E con A y B no paralelos, los vectores ( AyBA P− ) y B
son ⊥ s .
j. si =*
1 2, ,..., nB B B B es una base de nE entonces ningún iB puede ser el
vector nulo.
k. Si −, , 0nA B C E , C A B= + , A y B son vectores unitarios y
perpendiculares, entonces = 2C .
l. Para −, , 0nA B C E , si ( ) 0A B C• • = y ( ) 0A B C = entonces
B C=
2.5.3. Problemas
1. Dados los vectores de 3E = − −4 6 2A i j k , = − + −4 5 2B i j k ,
= −10,15, 5C , = −6, 3,7D , = − − +2 1
3 2E i j k

70
Determine:
a. Un vector de magnitud 3 paralelo a A E+ .
b. Un vector perpendicular a D con la mitad de su magnitud.
c. La medida del ángulo entre y B D .
d. El área del paralelogramo determinada por A C+ y D E− .
e. El vector proyección de B en A .
f. Un vector perpendicular a la vez a A E+ y D C− .
g. El área del triángulo determinado por D C y A .
2. Sean , A B y C vectores como se muestran en la figura
Si 2A B= = y 3 2C A B= − , halle:
a. C
b. El ángulo entre Ay C
c. A B C+ −
d. B C•
C
A
B
600
Figura 2.12. Ejercicio 2
3. En cada caso y usando varios métodos averiguar si los puntos ,A B y C son
colineales:
a. (2,3), (1,-1), (0,-5)A B C= = =
b. (1,3,0), (3,-5,4), (-2,5,1)A B C= = =
c. (1,2, 2), (3,-5,4), (-2,5,-1)A B C= − = =

d. ( 1,3,7,9), (6,5,2,-3), (10,9/2,-4,-27/2)A B C= − = =
4. Si C divide al segmento AB en la razón /r a b= , demuestre que
aAC AB
a b=
+.
5. Sean = ,0,1 , B= 2,b,3A a y = 4,5,C c , entonces deduzca condiciones
para , a b y c de modo que , , A B C sea una base de 3E .
6. Dados los vectores de 3E , = − =1, 4,6 , 1,4,4A B y = −0, 4,C m ,
determine m para que , ,A B C sea L.D.
7. Demuestre que para todo par de vectores , *A B V :
a. + = + • +2 2 2
2( )A B A A B B
b. + + − = +2 2 2 2
2( )A B A B A B
c. + − − = •2 2
4( )A B A B A B
8. Usando vectores, halle el ángulo entre diagonal de un cubo y la diagonal de una
de las caras del cubo y el ángulo entre la diagonal del cubo y una de sus aristas.
9. Si , *A B V y sabiendo que = 6A , A es ortogonal a B , y, para todo par
de escalares no nulos t y h , los vectores tA hB+ y 4 9hA tB− son
perpendiculares, entonces calcule
a. B
b. +2 3A B
10. Sean 3, , , A B C D E . Si se cumple que
0A B C D+ + − = y 2 0A B C D− + + =
entonces pruebe que
a. 0D B =
b. = 3
2B C D C

72
c. 2A C C D D A = =
d. C D D A =
11. Pruebe, usando vectores, que:
a. Las diagonales de un rombo son perpendiculares entre si.
b. El segmento que une los puntos medios de dos lados de un triángulo
mide la mitad del tercer lado.
c. Las diagonales de un rectángulo son congruentes.
12. Si 3, B, C EA , pruebe que si 0A B C+ + = entonces B A A C = .
13. Si 3, B, C EA , = =0,1, , 2 ,3 ,4A a B a a a y = 5 ,6 ,7 C a a a , halle
todos los valores reales de a de modo que , A B y C sean una base de 3E .
Expresar el vector 0,1,a como C.L. de la base.
14. Sean n, B, C E 0A − de modo que se cumple a la vez que
a. = = =1A B C
b. A B=A C=B C=0• • • entonces
a. Pruebe que A, B y C son L.I.
b. Si = =1, , , ,2,A a b B c d y = , ,3C e f , halle , , , , a b c d e y f
15. Sean A, B vectores de 3E de modo que =A B y
= • =2 2( ) 1A B A B ; encuentre A .
16. Dados los puntos ( 2,5), B(1,-3), C(6,7)A − y P (punto medio de BC ).
Halle el punto situado a los 2
3 de la mediana AP contados a partir del vértice
A . Muestre que dicho punto también es el punto situado a 2
3 de las otras dos
medianas a partir de los vértices.
17. Halle las coordenadas del punto de intersección de las medianas del
triangulo cuyos vértices son ( 2,4), B(4,-6), C(2,2)A − .
18. Exprese el vector −7, 1,2 como la suma de dos vectores, uno de los
cuales es paralelo y el otro perpendicular al vector −1, 1,2 .
19. Si ABC es un triángulo y , , L M N los puntos medios de sus lados,
demuestre que OA OB OC OM ON+ + = + para todo punto O .
20. Sea ABCD un paralelogramo, donde B y C son vértices opuestos. Si
AB E= , AC F= , AD G= . Demuestre que 1 1
( )2 2F E E G= − −
21. Sean AD ,BE ,CF las medianas del triángulo ABC . Demuestre que
0AD BE CF+ + = .
Related Documents