-
7/30/2019 Mooring Conditions
1/14
720
Hydrodynamic analysis of wave interactions
with a moored floating breakwater using the
element-free Galerkin method
Jeongwoo Lee and Woncheol Cho
Abstract: This paper deals with a numerical investigation of incident wave interactions with a moored pontoon-type
floating breakwater. The element-free Galerkin method, in which only nodal data are required to analyze the problem, is
employed to solve the diffraction and radiation boundary value problems addressed by the modified Helmholtz equation.
The numerical model includes the hydrodynamic and mooring analyses, and it is validated by previous numerical and
experimental results. Using the numerical model, we are able to assess the hydrodynamic performance of a moored
pontoon-type floating breakwater in regular waves. Numerical results are presented to show the effects of wave conditions
and mooring system configuration. This paper also presents the simple forms of stiffness coefficients of a slack mooring
line. The influence of mooring line condition on the performance of a floating breakwater is highlighted.
Key words: moored floating breakwater, element-free Galerkin method, mooring line condition.
Rsum: Cet article prsente une tude numrique des interactions des ondes incidentes sur un brise-lames flottant amarr
de type ponton. La mthode sans maillage de Galerkin, dans laquelle uniquement les donnes nodales sont requises pour
analyser le problme, est employe pour rsoudre les problmes de valeur de diffraction et de rayonnement aux limites
tels quabords par lquation dHelmholtz modifie. Le modle numrique comprend les analyses hydrodynamiques et
damarrage et il est valid par les rsultats numriques et exprimentaux antrieurs. En utilisant le modle numrique,
nous pouvons valuer la performance hydrodynamique dun brise-lames flottant amarr de type ponton avec des conditions
de vagues rgulires. Les rsultats numriques sont prsents afin de montrer les effets des conditions de vagues et de
la configuration damarrage. Cet article prsente galement les formes simples des coefficients de rigidit dune ligne
damarrage tension variable. Linfluence de ltat de la ligne damarrage sur le rendement dun brise-lames flottant est
souligne.
Mots cls : brise-lames flottant amarr, mthode sans maillage de Galerkin, condition de la ligne damarre.
[Traduit par la Rdaction]
1. Introduction
Floating breakwaters are considered to be alternatives to con-ventionalfixed breakwaters. They are useful in preserving smallmarinas and recreational harbors from wave forces. The cost ofa floating system is slightly dependent on water depth and bot-tom foundation conditions. In addition, floating breakwaters areecologically advantageous because they have little interactionwithwater circulation,biological exchange,and sedimenttrans-port. Thus, many studies have been undertaken to investigatethe performance of various types of floating breakwaters.
Numerical models based on the linear potential theory haveproven to be efficient tools to predict the sea-keeping behavior
of floating breakwaters.Generally, there aretwo main classes of
Received 10 October 2002. Revision accepted 7 March 2003. Pub-lished on the NRC Research Press Web site at http://cjce.nrc.ca/ on8 August 2003.
J. Lee1 and W. Cho. Department of Civil Engineering, YonseiUniversity, Seoul 120-749, Korea.
Written discussion of this article is welcomed and will be receivedby the Editor until 31 December 2003.
1 Corresponding author (e-mail: [email protected]).
numerical technique to solve the wave diffraction and radiationboundary value problems for velocity potentials when a float-ing body undergoes oscillations in waves. The most popularmethods are the finite element method (FEM) and the bound-ary element method (BEM). Both methods have been widelyused to compute the exciting forces and hydrodynamic coef-ficients due to wave interactions with a floating structure. TheFEM has been successfully tested by Chen and Mei (1974),Bai (1975), Newton (1978), and Sharan (1986) to evaluate thehydrodynamic coefficients. Bai and Yeung (1974) applied theFEM technique to a wavestructure problem and compared theresults with those from other methods. Leonard et al. (1983)used the FEM to solve the boundary value problems relatingto diffraction and radiation phenomena near the floating body,performing hydrodynamic analyses to estimate the added masscoefficients, damping coefficients, and responses of a float-ing body with varying incident wave angle, draft, depth, etc.Leonard et al. paid particular attention to negative added massin heave and the corresponding sharp damping coefficients fora dual structure at certain wave frequency ranges. Hanif (1983)and Sannasiraj et al. (1995, 1998) presented applications ofthe FEM to analyze the hydrodynamic behavior of a floatingbreakwater subject to its motions. Recently, the hydrodynamiccoefficients and forces on a twin structure under oblique waves
Can. J. Civ. Eng. 30: 720733 (2003) doi: 10.1139/L03-020 2003 NRC Canada
-
7/30/2019 Mooring Conditions
2/14
Lee and Cho 721
have been evaluated using the numerical method (Sannasiraj etal. 2000).
On the other hand, a numerical method based on the BEMor wave source method was used to obtain the solution to thewavestructure interaction problem (Garrison 1978; Sarpkayaand Isaacson 1981; Chakrabarti 1987; Isaacson and Baldwin
1996). Au and Brebbia (1982) investigated the application ofthe BEM to compute wave forces on fixed and floating offshorestructures of arbitrary shapes. Isaacson and Nwogu (1987) de-veloped a numerical procedure based on Greens theorem tocompute the exciting forces and hydrodynamic coefficients dueto the interaction of a regular oblique wave train with a longfloating cylinder. They also dealt with the effects of wave direc-tionality on the loads and motions of long structures. Bhat andIsaacson (1998) made BEM-based numerical and experimen-tal assessments of the performance of moored twin-pontoonfloating breakwaters with rectangular- and circular-section pon-toons. They evaluated the influence of various design parame-ters, such as relative draft, pontoon spacing, and mooring lineslackness, on the breakwater performance.
Even though the FEM and BEM, as mentioned previously,have been widely applied to solve the free-surface flow prob-lems, both solutions have certain limitations. The BEM hasdifficulty in handling nonlinear and discontinuous problems,and it also needs high computational times because the matrixarising in this formulation is full and nonsymmetric. The FEMrequires labour-intensive, time-consuming human resourcesformesh generation. In particular, numerical experiments in whichthe geometry of the structure is varied need to be performed be-cause the performance and response of floating breakwatersare significantly influenced by the width, draft, and shape ofstructure. Therefore, preprocessing tasks for mesh generationmay be reduced if meshless methods such as the element-freeGalerkin method (EFGM) are used, in which nodes represent-
ing the geometry of the structure and the boundary domain canbe easily added or removed. In the present paper, we focus onthe EFGM for the hydrodynamic analysis of wave interactionswith a floating breakwater.
The EFGM was introduced by Nayroles et al. (1992) and wasfirst called the diffuse element method (DEM). It is now betterknown as the EFGM, after modification by Belytschko et al.(1994). The main advantages of this method are no mesh, noelement connectivity, and easy pre- and post-processing tasks.The EFGM has been increasingly applied in solid mechanics(Belytschko et al. 1994, 1995; Belytschko and Tabbara 1996).Recently, the method has been introduced in the fields of mul-tiphase deforming porous media (Modaressi and Aubert 1998),hydraulics (Du 1999, 2000), and acoustic problems (Suleau and
Bouillard 2000). No previous efforts have been made, however,to apply the EFGM to water wave problems. Therefore, themain objective of the present paper is to propose an EFGM-based numerical model for simulating the wave interactionswith a floating breakwater. The formulation and numerical im-plementation are presented. By using the numerical model, thehydrodynamic performance of a moored floating breakwater inregular waves is assessed. In the design of a moored floatingbreakwater, it is necessary to assess the mooring forces act-ing on the body. These forces should be considered in evaluat-ing restoring forces depending on the mooring line stiffnesses.Therefore, this paper also presents the simple forms of stiffness
coefficients of a slack mooring line. The influence of mooringline condition on the performance of a floating breakwater ishighlighted.
2. Theoretical formulation
2.1. Hydrodynamic analysisThe present paper theoretically deals with the performance
of pontoon-type floating breakwaters. Theoretical formulationis based on the two-dimensional linear diffraction and radiationproblems due to the presence of a floating breakwater and itsmotions in waves. Based on the assumptions of an inviscid andincompressible fluid and an irrotational flow, the ideal fluid mo-tion can be represented by a velocity potential that satisfiesthe Laplace equation within the fluid domain. The breakwater isregarded as a long, rigid, horizontal cylinderoscillating in sway,heave, and roll, with each motion periodic in time and along thelongitudinal axis. Subject to the basic assumption that the inci-dent waves and oscillatory body motions are sufficiently small,the problem of wave interaction with a floating breakwater canbe described by a linear superposition of the diffraction andradiation problems (Isaacson and Nwogu 1987).
The right-handed Cartesian coordinate system is employed,with z measured upward from still water level and the y axisparallel to the longitudinal axis of the floating body. A defini-tion sketch of a wave floating breakwater interaction problemis shown in Fig. 1. The system is subject to a regular, small-amplitude wave train of height H and angular frequency .The incident waves obliquely propagate in water of depth d ina direction making an angle with the longitudinal axis.
The total velocity potential is assumed to be the sum of theincident potential 0, the scattered potential 4, and the radi-ation potential j (j = 1, 2, 3) in three modes of sway, heave,and roll. This is mathematically expressed in the form
[1] = 0 + 4 +3
j=1j
The incident wave potential can be represented by the linearwave theory given by
0( x ,y ,z ,t ) = Re igH
2
cosh [k(z + d)]cosh(kd)
[2]
exp [i(kx cos + ky sin t )]
= Re igH2 0(x,z) exp [i(ky sin t )]
where 0(x,z) is the nondimensional incident velocity poten-
tial; i is the imaginary unit,1; g is the gravitational acceler-
ation; and k is the wave number, which is related to the angularfrequency by the dispersion relation
[3] 2 = gk tanh(kd)
2003 NRC Canada
-
7/30/2019 Mooring Conditions
3/14
722 Can. J. Civ. Eng. Vol. 30, 2003
Fig. 1. Definition sketch.
For a linear diffraction problem, the scattered velocity po-tential, which is considered to vary sinusoidally in time and they axis, is described by s
[4] 4(x,y,z,t)
= Re igH
24(x,z) exp [i(ky sin t )]
where 4(x,z) is the unknown nondimensional scattered ve-locity potential. The boundary value problem for the scatteredpotential satisfying the Laplace equation (24 = 0) can bestated as the two-dimensional modified Helmholtz equation(Isaacson and Nwogu 1987):
[5a]24
x2+
24
z 2 24 = 0 in the fluid domain
[5b]4
z=
2
g4 at z
=0
[5c]4
z= 0 at z = d
[5d]4
n= 0
non SB
[5e]4
x= ik cos 4, x =
where is the x component of wave number k, k sin ; n is theoutward unit normal vector from the body boundary; and SB isthe body boundary surface.
Thewaveradiation problem canbe describedby theradiationvelocity potential associated with displacement or rotation inthe jth mode. The radiation potential varying periodically intime and the y axis can be expressed as
[6] j( x ,y ,z ,t ) = Reijj(x,z)
exp [i (y t)]
, j = 1, 2, 3where j(x,z) is the unknown nondimensional radiated veloc-ity potential; j is the complex amplitude of the oscillation ofthe body with three modes; and j = 1, 2, 3 denotes x, z direc-tions and rotation about the y axis, respectively. The radiationboundary value problem is defined similar to the diffractionproblem. The governing equation and boundary conditions for
the radiation velocity potential have the same forms as thoseof the boundary value problem for the scattered potential asstated in eqs. [5a][5e], except for the body surface boundarycondition. The boundary condition on the body surface is givenby
[7]
j
n = nj, j = 1, 2, 3 on SBwhere n1, n2 arethe x, z components of the outward unitnormalvector n from the body boundary and n3 = (z e)n1 xn2, inwhich (0, e) is the coordinate of the center of rotation.
Once the complex scattered potential, 4, and the complexradiation potential, j, are obtained, the hydrodynamic pres-sures and forces can be computed as follows. From the lin-earized Bernoulli equation, the hydrodynamic pressure can beexpressed as
[8] p = t
= iwhere is the fluid density. The hydrodynamic forces and mo-ment perunit length, Fj, canbe computed by simplyintegrating
the pressures along the body boundary surface, SB:
[9] Fj =
SB
pnjdS, j = 1, 2, 3
It is usually convenient to separate the hydrodynamic forces intothe wave exciting forces Fej due to the diffraction potential and
the motion-induced forces Fmj due to the radiation potential.
The wave exciting forces and the motion-induced forces canbe expressed in eqs. [10] and [11], respectively (Isaacson andNwogu 1987):
Fej = Re
1
2gH
SB
(0 + 4)nj[10]
exp [i(y t )] dS
= Re fj exp [i(y t )] , j = 1, 2, 3where fj is thecomplex wave excitingforce amplitudes andcanbe obtained from the incident and scattered velocity potentials,0 and 4, respectively, and
Fmj = Re
2i
SB
i nj exp [i(y t )]dS
[11]
= Re
2j i i + ij i i exp [i(y t )]
,
i, j = 1, 2, 3
where j i is the added mass coefficient and j i is the dampingcoefficient. The former is proportional to the body accelera-tion and the latter to the body velocity. These hydrodynamiccoefficients are obtained from the radiated potential j.
In the frequency domain, theequations of motionof thefloat-ing body oscillating in three modes can be expressed as
[12]
3i=1
2(Mj i + j i ) ij i
+ Cj i + Kj i
i = fj, j = 1, 2, 3
2003 NRC Canada
-
7/30/2019 Mooring Conditions
4/14
Lee and Cho 723
where Mj i , Cj i , and Kj i are the mass, hydrostatic stiffness,and mooring stiffness matrix coefficients, respectively. The dy-namic responses of the floating breakwater with three modesvarying sinusoidally in time and the y axis can be calculated bysolving eq. [12].
2.2. Mooring analysisThe mooring analysis is carried out in conjunction with the
hydrodynamic analysis to obtain the mooring line loads, theconfiguration of each line, and the associated restraints. Jain(1980) described the restraints of a mooring cable as a stiffnessmatrix that has linearized mooring line stiffness coefficientsin sway and heave modes. These stiffness coefficients are de-rived analytically by using the basic catenary equation for thecable equilibrium. It is assumed that the cable is perfectly flexi-ble,inextensible, and heavy. The linearized stiffness coefficientsare evaluated from the weight per unit length of the mooringline in water, the initial horizontal tension, the initial tensionat the body, the initial tension at the anchor, the coordinatesof the body with respect to the anchor point, and the mooring
line configuration, such as the length of the mooring line, theangle at the anchor point, the angle made with the body, andthe point of attachment of the mooring line with the floatingstructure. The mathematical forms of stiffness coefficients areomitted in this paper. The detailed expressions are presentedin Jain (1980). Sannasiraj et al. (1998) extended the methodof Jain by considering the restoring moment of mooring linesagainst the rolling motion. Sannasiraj et al. conducted a com-prehensive theoretical and experimental study of the behaviourof moored single-pontoon-type floating breakwaters and pre-sented the wave-attenuation characteristics for various moor-ing system configurations; however, they only considered tautmooring systems. In taut cables, there is no variable tangentialcontact with the seabed, so mooring line tension may be in-
creased significantly by a little movement of the floating body.This steep increase of mooring tension may affect the safety ofthe mooring system. Practically, a floating breakwater would bemoored by a number of slack cables in which there is variabletangential contact with the seabed. In our research, we carriedout a mooring analysis by considering the slack mooring sys-tem. Thus, in the present paper, mooring stiffness coefficientsare derived for the slack condition. The derivation procedure ispresented in Appendix A. The effects of mooring condition onthe wave attenuation and the mooring forces are discussed inSect. 4.4.
3. Element-free Galerkin method
formulation
3.1. Moving least-squares interpolant
In theEFGM,a moving least-squares (MLS)principle is usedto formulate the shape functions. No connectivity is needed,which is one of the main differences between the EFGM andthe FEM. The interpolant uh(x) of a function u(x) in a domain can be defined as
[13] uh(x) =m
i=1pi (x)i (x) = p(x)T(x)
where p(x) is the polynomial basis in the space xT = [x, z],superscript T represents the transpose of the matrix, and(x) isa vector of the coefficients. A linear basis and a quadratic basisin two dimensions are provided by
[14] p = [1, x , z]T for m = 3
[15] p = [1, x , z , x 2, x z , z2]T for m = 6The coefficients (x) are determined at any point x by mini-mizing a weighted discrete least-squares norm J:
[16] J =n
j=1wj(x)[pT(xj)(x) uhj]2
where wj(x) denotes the weight function, wj(x) w(x xj),which is non-negative and decays with increasing distance to apoint j; n is the number of points in the neighborhood ofx; and
uhj is the nodal value of u at x = xj. Standard minimizationwith respect to (x) gives
[17] = C1uh with C1 = A1Bwhere
[18] A =n
j=1wj(x)p(xj)
Tp(xj)
[19] B = [w1(x)p(x1), w2(x)p(x2), , wn(x)p(xn)]Hence, we have
uh(x) = pTC1uh[20]
=n
j=1
mi=1 p
i (x)
A1
(x)B(x)
ij uh
j
=n
j=1Nj(x)u
hj
From eq. [20], EFGM shape functions Nj(x) can then be ex-pressed as
[21] Nj(x) =m
i=1pi (x)
A(x)1B(x)
ij
The partial derivatives of the interpolation function Nj(x) are
thus obtained as
[22] Nj,x(x) =m
i=1
pi,x(A
1B)ij + pi (A1,x B + A1B,x)ij
where
[23] A1,x = A1A,xA1
[24] A,x =n
j=1w,x(x xj)p(xj)p(xj)T
2003 NRC Canada
-
7/30/2019 Mooring Conditions
5/14
724 Can. J. Civ. Eng. Vol. 30, 2003
[25] B,x = [w,x(x x1)p(x1), w,x(x x2)p(x2), , w,x(x xn)p(xn)]
In this study, the exponential weight function will be used witha circle domain of influence. The exponential weight functionat point j is given by
[26] w(x xj) = w(ds) =e(ds/c)q e(dm /c)q
1 e(dm /c)q ,d dm
where ds is the distance between point x and node xj, c isa con-stant that controls the relative weights, q is a power parameter,and dm is the size of the domain of influence ofxj. For dm wehave chosen the expression defined by Ouatouati and Johnson(1999):
[27] dm = dmax cjIn eq. [27], dmax is a scaling parameter that is generally 1.04.0,and cj is the maximum distance that is determined by searching
for enough neighbor nodes for A to be regular and invertible.We used a uniform distribution of nodes, so cj can be describedas
[28] cj =
dx 2 + dz 2
where dx and dz are the internodal distances. In our applica-tions, a parameter c is set to cj. For a detailed presentation ofthe EFGM, the reader is referred to Nayroles et al. (1992) andBelytschko et al. (1994).
3.2. Application to the diffractionradiation problemThe EFGM is applied to solve the diffractionradiation
boundary value problem of wave interactions with a floatingbreakwater. To obtain the discrete equations, it is necessary touse a variational weak form of the governing equation, whichis addressed by the modified Helmholtz equation and boundaryconditions. Taking the weak form of eq. [5a], integrating byparts, and substituting the natural and mixed boundary condi-tions yield
[29]
(i i + 2)d
f
()d
ik cos
()d =
B
(
n)d
where f is thefree surface; is the radiation boundary; B isthe immersedbody surface;and is a testfunction correspond-
ing to , which is nondimensional scattered or radiated velocitypotential ( = j, j = 1, 2, 3, 4). Then, a standard Galerkinprocedure is used to obtain the discrete equations correspond-ing to the weak form of the governing equation. According toeq. [20], the approximate velocity potential is described by
[30] h =n
i=1Ni i = N
where is a set of n nodal values for the velocity potentialand Ni are the shape functions defined in eq. [21]. Substitut-ing the expression of h given in eq. [30] into a weak form
of the governing equation (eq. [29]) yields a linear system ofequations:
[31] [ K1 + K2 + K3 ] {} = {P}where
[32] [K1] =
(N) (N)T + 2NNTd
[33] [ K2 ] = 2
g
f
NNTd
[34] [ K3 ] = ik cos
NNTd
The load vector for the diffraction problem is given by
[35] { P } =
B
N0
nd
For the radiation problem, the load vector in each degree of
freedom is
[36] { P } =
B
Nnjd, j = 1, 2, 3
For many problems, the imposition of an essential boundarycondition is difficult because, in general, MLS shape functionslack the Kronecker delta property (eq. [37]). To overcome thisproblem, the Lagrange multipliers method, the FEM, and thepenalty method have been used. Such a difficulty is not en-countered in the diffractionradiation problem considered inthis study, however, because no essential boundary conditionsexist in eqs. [5b][5e]:
[37] i (xj) = ij = 1, i = j0, i = jTo numerically calculate the integrals of eqs. [32][36], the
background integral cells are used over the entire domain. Ineach integration cell, 4 4 Gauss quadrature is used to eval-uate the stiffness of the EFGM. At each quadrature point, thedomain of influence and the nodes inside it are determined. Thediscrete equations are assembled by looping over each quadra-ture point. The EFGM shape functions and its derivatives arecalculated by eqs. [21] and [22] and assembled by looping overeach integration cell. The system equations are solved to getvelocity potentials using a polynomial basis function with anexponential weight function.
4. Numerical tests and applications
4.1. Validation of the numerical modelThe present EFGM-based numerical model has been vali-
dated by comparison with the numerical results previously re-ported by Sannasiraj et al. (1998). Consider now the case ofa moored, single-pontoon, rectangular-section breakwater withdepth d = 2.35 m, width a = 0.4 m, and draft D = 0.1 m. Theregular wave height is 0.05 m and the frequency range is 0.31.5 Hz. The body is restrained by four mooring lines, each oflength L = 4.7 m. The computation is performed in a bounded
2003 NRC Canada
-
7/30/2019 Mooring Conditions
6/14
Lee and Cho 725
Fig. 2. Comparison of responses of amplitude operators (RAOs)
in sway as a function of normalized wave frequency. EFGM,
element-free Galerkin method; FEM, finite element method.
domain. The domainconsidered here is describedby 3616 innerpoints and 258 boundary surface points that are regularly dis-tributed. The distance between nodes is 0.05 m. A linear basisand circular domains of influence with dmax = 1.0 to 1.5 areused.
Figures 24 compare the computed responses of amplitudeoperators (RAOs) in sway, heave, and roll motions as a functionof normalized wave frequency, 2a/2g, with the experimentaland numerical results of Sannasiraj et al. (1998), who used theFEM to solve the corresponding boundary value problem. Here,RAO means the ratio of motion amplitude to wave amplitude.ThecomputedRAO values agree well with theresults estimatedby Sannasiraj et al. over the whole range of2a/2g. In partic-
ular, both numerical solutions are almost the same except at afrequency range of2a/2g from 0.2 to 0.3 in sway motion. Thediscrepancy may be attributed to the difference of the numer-ical scheme and also to the viscous damping, which was con-sidered, near the resonant frequency, in the theoretical modelof Sannasiraj et al. In their simulation, an empirical dampingcoefficient estimated from the experimental results was addedto damping coefficients in the equations of motion.
As shown in Fig. 5, we see that the computed transmis-sion coefficients (Kt) are in satisfactory agreement with theresults of Sannasiraj et al. (1998). There are some variationsbetween the experimental and numerical wave transmissions,however. Sannasiraj et al. explain that these variations wouldbe caused by viscous damping forces and various uncertainties.
The most significant disagreement between the numerical andexperimentally measured transmission coefficients appears tobe near 2a/2g = 1.0 to 1.1, where the measured minimumwave transmission is not as extreme as predicted by the numer-ical model. In our opinion, this is because the viscous damp-ing due to the flow separation at sharp corners damps out theheave motion. This means that the significantly reduced heavemotion would cause a proportional increase in the measuredwave transmission. Moreover, the reduced heave motion maybe attributed, in part, to the very taut mooring condition be-cause mooring lines are not enough to allow for large motions.In particular, at 2a/2g = 1.1, the sway and heave motions
Fig. 3. Comparison of RAOs in heave as a function of
normalized wave frequency.
Fig. 4. Comparison of RAOs in roll as a function of normalizedwave frequency.
Fig. 5. Comparison of transmission coefficients (Kt ) as a function
of normalized wave frequency.
2003 NRC Canada
-
7/30/2019 Mooring Conditions
7/14
726 Can. J. Civ. Eng. Vol. 30, 2003
are restricted by each other because the phase angles of eachmotion with respect to the incident wave are almost the same.Discrepancies are also seen in the results for the transmissioncoefficients in the range of 2a/2g from 1.5 to 2.0, where thewave generated by sway motion contributes a large fraction ofthe entire transmitted wave. The cause of these discrepancies
for short waves is that the measured values of sway motion areless than the predictions of the numerical model. It is difficultto determine the reason for differences in experimentally mea-sured and numerically computed sway motions, however. Inprevious work by Isaacson and Baldwin (1996), it was foundthat the horizontal response of a floating body to short wavesis dominated by the displacement due to the mean wave driftforce rather than the oscillatory motion. Considering the influ-ence of such a drift motion, we infer that the mean position ofthefloating breakwater maybe moved to theleeward side by themean wave drift force. This horizontal excursion of the float-ing breakwater increases the tautness of seaward mooring lines,which leads to restriction of sway oscillation because mooringlines are not sufficiently long to allow large movement.
4.2. Influence of element-free Galerkin methoddiscretization
This section presents the influence of the EFGM discretiza-tion refinement on the accuracy of the solution. Owing to thediscretization error,the numericalwave propagates with a phasevelocity / kh, where kh is the numerical wave number, differ-ent from a given wave velocity / k. Figure 6 illustrates thephase error between the exact and numerical wave velocity po-tential profiles. This numerical error must be reduced by appro-priate discretization (e.g., suitable nodal distributions and sizeof the domains of influence). In the EFGM, there are selectableparameters affecting the accuracy as included in eq. [26]. Theoptimal choiceis oneof themajor factors influencing theperfor-
mance of the EFGM. The solution accuracy may significantlydepend on the internodal spacing (h) and the sizes of the do-mains of influence (dm).
We have performed numerical tests for a dual-pontoon float-ing body to study the effects of the EFGM discretization. Thecase of a dual-pontoon breakwater with two rectangular sec-tions of width a = 2.0 m, draft D = 1.0 m, and pontoonspacing b = 2.0 m located in a water depth d = 5.0 m isconsidered. A regular wave height is 1.0 m, and the incidentwave direction is taken to be normal to the longitudinal axis.The radiation boundary is fixed at a distance of 10a from thebody. We consider a regular distribution of nodes (internodalspacing h = 0.25 and 0.50 m). The linear basis is used, and thesizes of the domains of influence are identical for all nodes. The
parameter varied in the simulation is the size of the domain ofinfluence, dm.
The numerical error was investigated by computing the scat-tered velocity potential (4) distributions as a function of dis-tance from the body obtained by numerically solving eq. [5a].We are then able to determine the numerical wave number kh,for a given value ofk, by calculating the scattered wave length,which is obtained from the scattered wave velocity potential(4) distribution. The effects of the EFGM discretization on theaccuracy are shown in Figs. 7 and 8 for h = 0.25 and 0.50 m,respectively. The sizes of the domain of influence play an im-portant role in the accuracy. For several values of the scaling
Fig. 6. Phase error between exact and numerical wave velocity
potential profiles.
parameter dmax, which is directly related to the size of the do-mains of influence, the phase differences between exact and nu-merical waves increase when k increases, except for dmax = 1.0m. This means that large values of dmax generate phase errorsfor short waves. We also note that there exists a limiting pointofk unaffected by dmax. When h = 0.25 m, the limiting valueofk isabout 1.0 m1. For h = 0.5 m, large values ofdmax yieldphase errors when wave numbers are beyond 0.5 m1. Itis clearthat a suitable value of nondimensionalized wave number ( kh)to reduce the EFGM discretization error should be less than0.25. Similar results are obtained for the radiated potential, buta discussion of the results is not presented in this paper.
4.3. Efficiency of the numerical model
In this section, we examine the computational efficiency ofthe numerical model. The program based on the element-freeGalerkin method (EFGM) was run on an IBM compatible PCPentium IV running at 1.2 GHz with 524 MB RAM. For theprevious example given in Sect. 4.2, the central processing unit(CPU) time in relation to the size of the domain of influenceis shown in Table 1. As the size of the domain of influence be-comes larger and larger, the CPU time greatly increases. Thisis because the computing time required for generation of thesystem matrix increases and the bandwidth of the system ma-trix becomes large. The comparison of EFGM and FEM com-puting times is also made for identical node distributions andidentical numbers of degrees of freedom. For comparison, theproblem was also solved by FEM with four-node rectangular
elements, which is similar to EFGM with dmax = 1.0 m. Thecomputational CPUtimes arecompared inTable 1. It isapparentthat more computational efforts are needed for EFGM than forFEM. This is because generation of the system matrix is moreexpensive and an additional computational routine is requiredfor determining the nodes inside the domains of influence overall Gaussian points. It should be noted, however, that the pre-and post-processing tasks are significantly reduced for EFGMcompared with those for FEM, since the mesh generation isnot necessary and the nodes can be easily moved, removed,and added in the domain considered for EFGM. Modificationof mesh connectivity and corresponding renumbering of nodes
2003 NRC Canada
-
7/30/2019 Mooring Conditions
8/14
Lee and Cho 727
Fig. 7. Effect of the EFGM discretization on the accuracy
(h = 0.25 m).
Fig. 8. Effect of the EFGM discretization on the accuracy
(h = 0.5 m).
and elements should be required for FEM if the distribution ofnodes is changed.
4.4. Applications4.4.1. Comparison of single- and dual-pontoonbreakwaters
Consideration is now given to the moored single- and dual-pontoon floating breakwaters with thesame cross section as thatused in Sect. 4.2. Except for a pontoon spacing of b = a/2,all other conditions are the same as those given in Sect. 4.2.The floating body with a longitudinal length of 40.0 m is re-strained by 10 taut mooring lines. Each line has a weight perunit length ofw0 = 183 N/m in water. The mooring line stiff-ness coefficients proposed by Jain (1980) are used for moor-ing analysis. The numerical results for a dual-pontoon break-
Table 1. Comparison of CPU times
Numerical method CPU time (s)
FEM 224
EFGM
dmax = 1.0 318
dmax = 2.0 350dmax = 3.0 435
dmax = 4.0 643
water and the corresponding results for a single-pontoon break-water are shown in Figs. 911. The hydrodynamic behavior of adual-pontoon breakwater is very different from that of a single-pontoon breakwater. The most notable aspect is the occurrenceof a sharp dip and peak in heaving motion at intermediate wavefrequencies (Fig. 10). This is because of a negative added massin heave and an associated sharp peak in the damping coeffi-cient.For thepresent case, 22 = 8027 kg/m at ka = 1.1.TheRAO in sway motion for a dual-pontoon section is lower be-cause of the large mass and added mass coefficients. Figure 11
shows the variation of transmission coefficients Kt for single-and dual-pontoon breakwaters and reveals that a dual-pontoonbreakwater is more efficient than a single-pontoon breakwaterin attenuating wave forces at overall frequency ranges exceptnear the resonant frequency, ka = 1.2 to 1.4. As ka increasesto a value of 1.0, the transmission coefficients for the case of adual-pontoon section drop from 1.0 to 0.1 because of the neg-ative added mass, large damping coefficients, and the out ofphase of velocity potentials. The transmission coefficients thensharply increase near the resonant frequency, ka = 1.4.Thisre-sults from the large heaving motion and the insignificant phasedifference between the incident wave potential and the radiatedpotential in heaving mode.
4.4.2. Influence of incident wave directionThe influence of incident wave direction on the degree of
transmission has been assessed. Numerical results for the samefloating breakwater as that in Sect. 4.4.1.are presentedin Fig. 12.The floating breakwater is subject to waves with incident anglesof 0, 15, 30, and 45. All cases show steep curves becauseof a sharp dip and peak in heaving motion, as expected for adual-pontoon floating breakwater. The degree of wave attenu-ation generally increases as the incident angle increases atintermediate frequencies. Figure 12 also shows that the peak ofKt tends to move slightly towards higher frequency ranges.
4.4.3. Influence of mooring conditionThe computed wave transmissions and mooring forces are
compared for both taut and slack mooring lines to evaluate theeffects of mooring condition on the performance of a floatingbreakwater. For the condition of a taut mooring line, the stiff-ness coefficients proposed by Jain (1980) are included in theequations of motion. On the other hand, for the condition of aslack mooring line, we use the slack mooring stiffness coeffi-cients derived in Appendix A. The arc length of a mooring lineabove the seabed L is set at 8.0 m, and the line weight in wa-ter per unit length w0 is set at 183 N/m for both taut and slackmooring lines.The angle at the anchorpoint and the angle madewith the body for a taut mooring line are 5 and 50, respec-tively. The coordinates of attachment points of the mooring line
2003 NRC Canada
-
7/30/2019 Mooring Conditions
9/14
728 Can. J. Civ. Eng. Vol. 30, 2003
Fig. 9. Comparison of variation of RAOs in sway between single
and dual pontoons.
Fig. 10. Comparison of variation of RAOs in heave betweensingle and dual pontoons.
Fig. 11. Comparison of variation of transmission coefficients
between single and dual pontoons.
Fig. 12. Variation of transmission coefficients with incident angles
of 0, 15, 30, and 45.
with the floating structure are (xA, zA) = (2.5m, 1.0m). Inslack condition, the angle made with the body is 53.1 and thelength of the mooring line lying on the seabed l is 8.0 m, thatis, the total mooring line length L = 16.0 m.
The mooring force amplitudes FM can be evaluated fromthe product of the mooring stiffness matrix multiplied by thedisplacement vector. The results in Fig. 13 show very largedifferences between taut and slack mooring force amplitudesfor all frequency ranges. This is because the stiffness of theslack mooring line is much less than that of the taut mooringline. For both mooring conditions, there are distinctive peaks inmooring forces at ka = 1.4 that arerelatedto maximumheavingmotion. Even though mooring forces are different from eachother, there is no significant influence of mooring condition for
wave attenuation as shown in Fig. 14 because the mooring linestiffness is negligible compared with the mass and hydrostaticstiffnesses.
Upward and lateral forces loaded to the floating body witha slack mooring system tend to lift the mooring line from theseabed and reduce the length lying on the seabed, which leadsto the unexpected increase in mooring force. It is therefore im-portant that the configuration of the mooring line should bedesigned to achieve safe mooring conditions, i.e., conditionssuch that each mooring line at its attachment to the anchor liesalong the seabed. We calculated the maximum and minimumlengths of a mooring line remaining on the seabed when thefloating body moves to the farthest location from the initial po-sition. Figure 15 shows the variation in length of a mooring line
on the seabed with nondimensionalized wave number ka . Forlong waves and near the resonant frequency, large variations inl are apparent. These variations result from the large sway mo-tion at short wave frequencies and large heave motion near theresonant frequency. At ka = 1.4, l reaches zero, which meansthat the slack mooring line changes to a taut condition. We alsoperformed iterative computations to obtain the critical lengthlc for a mooring system to be in slack condition. If the lengthlying on the seabed is initially less than the critical length, aslack mooring line changes to a taut condition by movementof the floating body. Figure 16 shows the relationship betweenthe critical lengths and wave frequencies. The predicted crit-
2003 NRC Canada
-
7/30/2019 Mooring Conditions
10/14
Lee and Cho 729
Fig. 13. Comparison of variation of mooring forces between taut
and slack conditions.
Fig. 14. Comparison of variation of transmission coefficientsbetween taut and slack conditions.
ical lengths are shortened at high wave frequencies except atka = 1.4. As the total mooring line length L increases, the crit-ical length also increases. We see that the ratios of the criticallength to the total mooring line length are within the range of0.10.6 in our case study. From Fig. 16, a sufficient length ofline lying on the seabed is required for the mooring system tobe in the slack condition for overall frequencies.
5. Summary and conclusions
This paper presents a numerical formulation and an imple-mentation of the element-free Galerkin method (EFGM) forcalculating hydrodynamic coefficients of a moored pontoon-type floating breakwater. The numerical model is based ontwo-dimensional linear wave diffractionradiation theory fornormal and oblique incident wave interactions with a floatingbreakwater. The EFGM-based numerical model is applied toexample problems to investigate the performance of a mooredpontoon-type floating breakwater. Numerical results are pre-
Fig. 15. Variation in length of a mooring line on the seabed.
Fig. 16. Critical lengths of a mooring line lying on the seabed.
sented to show the effects of wave conditions and the config-uration of the mooring system. In this study, simple forms ofslack mooring line stiffness coefficients are derived to assessthe effects of mooring line condition on the performance of afloating breakwater. The main conclusions from this researchare as follows.
(1) Element-free Galerkin method parameters such as the sizeof the domain of influence and the internodal spacing playan important role in the accuracy of the numerical solu-
tion. Large values of the sizes of the domains of influencegenerate phase errors for the case of short waves. Therealso exists a limiting point of wave number k unaffectedby thesize of thedomain of influence.To reducethe EFGMdiscretization errors, nondimensionalized wave number khshould be under the value of kh = 0.25.
(2) The hydrodynamic behaviors of a dual-pontoon breakwaterare different from those of a single-pontoon breakwater.Themost notable aspectis theoccurrence of a sharp dipandpeak in heaving motion of a dual-pontoon breakwater. It isalso seen that the transmission coefficients are significantly
2003 NRC Canada
-
7/30/2019 Mooring Conditions
11/14
730 Can. J. Civ. Eng. Vol. 30, 2003
affected by the heaving motion.
(3) As the incident angle increases, the degree of wave atten-uation generally increases and the peak transmission coef-ficient at intermediate frequencies tends to move slightlytoward higher frequency ranges.
(4) Large differences between taut and slack mooring forceamplitudes for all frequency ranges are seen in our exam-ple. However, there is no significant influence of mooringcondition on wave attenuation because of the small moor-ing line stiffness relative to the mass and hydrostatic stiff-nesses. To achieve a safe slack mooring condition, morethan half of the total mooring line length must be lying onthe seabed.
References
Au, M.C., and Brebbia, C.A. 1982. Numerical prediction of wave
forces using the boundary element method. Applied Mathematical
Modelling, 6: 218228.
Bai, K.J. 1975. Diffraction of oblique waves by an infinite cylinder.Journal of Fluid Mechanics, 68: 513535.
Bai, K.J., and Yeung, R.W. 1974. Numerical solutions to free surface
flow problems. In Proceedings of the 10th Symposium on Naval
Hydrodynamics, Cambridge, Mass., 2428 June 1974. Office of
Naval Research, Washington, D.C. pp. 609647.
Belytschko, T., and Tabbara, M. 1996. Dynamic fracture using
element-free Galerkin methods. International Journal for Numer-
ical Methods in Engineering, 39: 923938.
Belytschko,T., Lu,Y.Y., and Gu, L. 1994.Element-free Galerkin meth-
ods. International Journal for Numerical Methods in Engineering,
37: 229256.
Belytschko, T., Lu, Y.Y., and Gu, L. 1995. Crack propagation by
element-free Galerkin methods. Engineering Fracture Mechanics,
51(2): 295315.Bhat, S.,and Isaacson,M. 1998. Performance of twin-pontoon floating
breakwaters. In Proceedings of the 8th International Offshore and
Polar Engineering Conference, Montral, Que., 2429 May 1998.
International Society of Offshore and Polar Engineers (ISOPE),
Calif. Vol. 3, pp. 584589.
Chakrabarti, S.K. 1987. Hydrodynamics of offshore structures. Com-
putational Mechanics Publications, Southampton, U.K.
Chen, H.S., and Mei, C.C. 1974. Oscillations and save forces in a
man-made harbour in the open sea.In Proceedings of the 10thSym-
posium on Naval Hydrodynamics, Cambridge, Mass., 2428 June
1974. Office of Naval Research, Washington, D.C. pp. 537596.
Du, C.J. 1999. Finite-point simulation of steady shallow water flows.
ASCE Journal of Hydraulic Engineering, 125(6): 621630.
Du, C.J. 2000. An element-free Galerkin method for simulation ofstationary two-dimensional shallow water flows in rivers. Compu-
tational Methods in Applied Mechanical Engineering, 182: 89107.
Garrison, C.J. 1978. Hydrodynamic loading of large offshore struc-
tures. Three dimensional source distribution methods. In Numeri-
cal methods in offshore engineering. Edited by O.C. Zienkiewicz,
R.W. Lewis, and K.G. Stagg. Wiley, Chichester, U.K., pp. 97140.
Hanif, M. 1983. Analysis of heaving and swaying motion of a floating
breakwater by finite element method. Ocean Engineering, 10(3):
181190.
Isaacson, M., and Baldwin, J.F. 1996. Moored structures in waves and
currents. Canadian Journal of Civil Engineering, 23(2): 418430.
Isaacson, M., and Nwogu, O.U. 1987. Wave loads and motions of
long structures in directional seas. Transactions of the ASME, 109:
126132.
Jain, R.K. 1980. A simple method of calculating the equivalent stiff-
nesses in mooring cables. Applied Ocean Research, 2: 139142.
Leonard, J.W., Huang, M.-C., and Hudspeth, R.T. 1983. Hydrody-
namic interference between floating cylinders in oblique seas. Ap-plied Ocean Research, 5(3): 158166.
Modaressi, H., and Aubert, P. 1998. Element-free Galerkin method
for deforming multiphase porous media. International Journal for
Numerical Methods in Engineering, 42: 313340.
Nayroles, B., Touzot, G., and Villon, P. 1992. Generalizing the finite
element method: diffuse approximation and diffuse elements. Com-
putational Mechanics, 10: 307318.
Newton,R.E. 1978. Finite element analysis of two-dimensional added
mass and damping. In Finite elements in fluids I. Edited by R.H.
Gallagher et al. John Wiley and Sons, New York, pp. 219232.
Ouatouati, A.E., and Johnson, D.A. 1999. A new approach for numer-
ical modal analysis using the element-free method. International
Journal for Numerical Methods in Engineering, 46: 127.
Sannasiraj, S.A.,Sundar,V., and Sundaravadivelu, R. 1995.The hydro-dynamic behaviour of long floating structures in directional seas.
Applied Ocean Research, 17: 233243.
Sannasiraj, S.A., Sundar, V., and Sundaravadivelu, R. 1998. Mooring
forces and motion responses of pontoon-type floating breakwaters.
Ocean Engineering, 25(1): 2748.
Sannasiraj, S.A., Sundaravadivelu, R., and Sundar, V. 2000.
Diffractionradiation of multiple floating structures in directional
waves. Ocean Engineering, 28: 201234.
Sarpkaya, T., and Isaacson, M. 1981. Mechanics of wave forces on
offshore structures. Van Nostrand Reinhold, New York.
Sharan, S.K. 1986. Modelling of radiation damping in fluids by finite
elements. International Journal for Numerical Methodsin Engineer-
ing,23
: 945957.Suleau, S., and Bouillard, Ph. 2000. One dimensional dispersion anal-
ysis for the element-free Galerkin method for the Helmholtz equa-
tion. International Journal for Numerical Methods in Engineering,
47: 11691188.
List of symbols
a width of breakwater
b pontoon spacing
c constant that controls the relative weights
Cji hydrostatic stiffness matrix coefficients
d water depthdm size of the domain of influence
dmax scaling parameter
ds distance between point x and node xjdx , dy internodal distances
D draft
fj complex wave exciting force amplitude
Fj hydrodynamic forces and moment per unit length
Fej wave exciting forces due to the diffraction
potential
Fmj motion-induced forces due to the radiation
potential
2003 NRC Canada
-
7/30/2019 Mooring Conditions
12/14
Lee and Cho 731
FM mooring force
g gravitational acceleration
h internodal spacing
H wave height
i imaginary unit
J weighted discrete least-squares norm
k wave number
kh numerical wave number
Kji mooring stiffness matrix coefficients
Kt transmission coefficient
l length of a mooring line lying on the seabed
lc critical length
L total mooring line length
L arc length of mooring line above the seabedMji mass matrix coefficients
n outward unit normal vector
Nj(x) EFGM shape functions
Nj,x(x) partial derivatives of the interpolation function
p hydrodynamic pressure
p(x) polynomial basis in the space xT = [x, z]P load vector
q power parameter
s arc length
SB body boundary surface
T tension in the cable
Th, Tv horizontal and vertical components of tension
T0 horizontal component of tension
u function in domain
uh interpolant ofu
w0 cable weight in water per unit length
wj(x) weight function
X horizontal coordinate from an origin B
Z vertical coordinate from an origin B
z vertical coordinate from an origin O
(x) vector of the coefficients
incident angle
test function corresponding to
x component of wave number k
nondimensional scattered or radiated velocity
potential
h approximate velocity potential
j(x,z) nondimensional radiated velocity potential
0(x,z) nondimensional incident velocity potential
4(x,z) nondimensional scattered velocity potential
velocity potential
j radiation potential
0 incident potential
4 scattered potential
B
immersed body surface
f free surface
radiation boundaryj complex amplitude of the oscillation of the body
ji damping coefficient
ji added mass coefficient
fluid density
angle between horizontal line and tangential line
at any point on the cable
angular frequency
domain
set ofn nodal values for the velocity potential
Appendix A:
The closed form of stiffness coefficients for a slack cable hasbeen derived following the procedure given by Jain (1980), whopresented a simplified method of calculating the stiffnesses ofa taut mooring cable. It is assumed that the cable is inextensibleand heavy, the cable offers no resistance to bending, and the
current drag force acting on the cable is negligible.
A.1. Basic equations of cable equilibriumFor cable equilibrium, horizontal and vertical components of
tension are
[A.1] Th = T cos = T0[A.2] Tv = T sin = w0swhere T is the tension in the cable, s is the arc length, w0 isthe cable weight in water per unit length, T0 is the horizontalcomponent of tension, and is the angle between horizontalline and tangential line at any point on the cable. Cable tensioncan be expressed in terms of arc length
[A.3] T = T0
1 +
w0s
T0
21/2
Cartesian coordinates of a point on the cable can be describedfrom the catenary equation
[A.4] x = T0w0
sinh1
w0s
T0
[A.5] z = T0w0
1 +
w0s
T0
21/2 1
A.2. Stiffness coefficients for slack cableThe basic equations for the cable equilibrium are used to
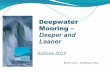
derive the slack mooring line stiffnesses. In the case of the slackcondition, the lower end of the line is tangential to the seabedand any change of tension causes the cable to partially lift fromor drop to the seabed. Thus the length of a mooring line lyingon the seabed will vary with top end movement. Figure A.1shows the sectional sketch of a mooring cable with length L toan anchor point B. Three sets of Cartesian coordinates ( X, Z),(x, z), and (x, z) are selected which have origins B, O, andO, respectively. The coordinates of point A with respect to theorigin O are
[A.6] xA = T0w
sinh1
L lT0
w0 = T0
w0sinh1
w0L
T0
zA =T0
w0
1 +
L lT0
w0
21/2 1
[A.7]
= T0w0
1 +
w0L
T0
21/2 1
2003 NRC Canada
-
7/30/2019 Mooring Conditions
13/14
732 Can. J. Civ. Eng. Vol. 30, 2003
Fig. A.1. Mooring line coordinate systems.
Z z
x , xX,B O
AX
Z
z'
A
O
where L is thetotalcablelength, l is the lengthof a mooring linelying on the seabed (BO), and L = L l. As point A moves toA by small movements X and Z, the position of origin Ois also changed to O (OO = BO BO = l l = l). Thecoordinate of point A with respect to O is (xA + xA, zA +zA) = (xA + X l,zA + Z). Here, xA and zA arethe horizontal and vertical variations, respectively; and l isthe small amount of movement of the origin, which is equal tothe small variation in l. The small movement of point A causesthevariations in the length l and the horizontal tension T0. Fromeqs. [A6] and [A7]
[A.8] xA =dxA
dT0T0 +
dxA
dll = T0
T0xA
T0
w0
w0
T0l + w0L
T20T0
1 +
w0L
T0
21/2
[A.9] zA =dzA
dT0 T0 +dzA
dl l =T0
T0 zA L w0
T0 l +w0L
T20 T0
1 + w0L
T02
1/2
where l and T0 are small variations in l and T0, respectively.Equations [A8] and [A9] are rewritten with respect to the (X, Z) coordinate system:
[A.10] X = T0T0
(XA l) T0
w0
w0
T0l + w0L
T20T0
T0
TA+ l = T0
T0(XA l) +
1 T0
TA
l L
TAT0
[A.11] Z = T0T0
ZA L
w0
T0l + w0L
T20T0
T0
TA= T0
T0ZA
w0L
TAl w0L
2
T0TAT0
where (XA, ZA) = (xA + l, zA) is the coordinate of A with respect to B, X = xA + l, Z = zA, and TA is theinitial tension at point A. From eq. [A3],
[A.12] TA = T0
1 +
w0L
T0
21/2
A.3. Stiffness componentsLinearized stiffness coefficients for a slack mooring line are evaluated as follows.
A.3.1. Horizontal stiffness due to a vertical movementThe horizontal stiffness due to a vertical movement of point A is defined as
[A.13] K12 =T0
Z
As X = 0,
[A.14] l = T0T0 (XA l) LT0
TA TA
TA T0
Insert eq. [A14] into eq. [A11], then
Z = T0T0
ZA +w0L
TA
T0
T0(XA l)
LT0TA
TA
TA T0
w0L
2
T0TAT0[A.15]
= T0T0
ZA
w0L2
TA+ w0L
TA T0
(XA l)
LT0TA
[A.16] K12 =T0
Z= T0
ZA
w0L2
TA+ w0L
TA T0
(XA l)
LT0TA
1
2003 NRC Canada
-
7/30/2019 Mooring Conditions
14/14
Lee and Cho 733
Using eqs. [A7] and [A12] and zA = ZA, then
[A.17] ZA w0L
2
TA= TA T0
w0 w0L
2
TA= 1
w0
TA T0
T2A T20TA
= T0
w0
TA T0
TA
= T0
TAZA
From eqs. [A16] and [A17], K12 can be rewritten as
[A.18] K12 = T0Z
= T0
w0LTA T0
XA l L
T0TA
T0
TAZA
1
A.3.2. Vertical stiffness due to a horizontal movementThe stiffness component K21, vertical stiffness due to a horizontal movement, is defined as
[A.19] K21 =Tv
X
As Z = 0,
[A.20] l = TAw0L
T0
T0ZA
w0L2
TAT0T0
= TA
w0L
T0
T0
ZA
w0L2
TA
= T0
w0L ZA =
T0
w0L
TA T0
w0
Insert eq. [A20] into eq. [A10]; then
X = T0T0
(XA l)
TA T0TA
T0
w0L ZA
L
TAT0[A.21]
= T0w0
w0
T0
XA l
LT0TA
TA T0T0L
T0
TAZA
= T0w0
TA T0
T0L
w0L
TA T0
XA l
LT0TA
T0
TAZA
From eq. [A2],
[A.22] K21
=w0
(l)
X =T0 w0L
TA T0 XA l LT0
TA
T0
TA
ZA1
=K12
A.3.3. Horizontal stiffness due to a horizontal movementThe horizontal stiffness resulting from a horizontal movement, K11, can be calculated from eqs. [A18] and [A21] as
follows.As Z = 0,
[A.23] K11 =T0
X=
w0L
TA T0
K12
A.3.4. Vertical stiffness due to a vertical movementFrom X = 0 and eqs. [A14] and [A18],
[A.24] K22 =Tv
Z = w0(
l)
Z = w0(
l)
T0
T0
Z =w0
T0 TA
TA T0
XA l T0L
TA
K12
2003 NRC Canada