10/23/14 1 Modeling Vestibular and Vestibulo-Ocular Reflex Function John Carey, MD Otolaryngology-Head & Neck Surgery 23 October 2014 The VOR stabilizes images on the retina Afferent firing rate goes up ipsilaterally…. …and down contralaterally.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
10/23/14
1
Modeling Vestibular and Vestibulo-Ocular Reflex
Function John Carey, MD
Otolaryngology-Head & Neck Surgery 23 October 2014
The VOR stabilizes images on the retina
Afferent firing rate goes up ipsilaterally….
…and down contralaterally.

10/23/14
2
Horizontal VOR
Outline • Macromechanics of the canal
– Torsional pendulum model predicts velocity encoding. • Encoding by the vestibular nerve
– Some afferents do encode velocity in expected linear fashion. – Others encode acceleration; nonlinearities begin to appear.
• Mechanics of the eye plant – Uniform dynamics common to all eye movements, including VOR
• Central processing and signal perseveration – Velocity storage – Velocity-to-position integrator
• Whole VOR models – Robinson model is a good start. – Minor/Lasker et al models explain nonlinearities seen in pathology,
learning. – 3D models to explain canal-otolith interactions

10/23/14
3
Review of the vestibular endorgans
• 3 semicircular canals at roughly right angles – angular
acceleration sensors
• 2 otolith organs utricle & saccule – linear
acceleration sensors
Semicircular canal stimulation • The ampulla, a swelling at the
end of the canal where it meets the utricle, contains the sensory neuroepithelium of the canal.
• Hair cells are arrayed on the crista , a saddle-shaped structure.
• Their stereocilia project into an overlying gelatinous cupula.
• Deflection of the cupula deflects the stereocilia, indicating rotation of the head.

10/23/14
4
• When the head accelerates in the plane of a canal, inertia causes the endolymph in the canal to lag behind the motion of the membranous canal.
• Relative to the canal, endolymph effectively moves in the opposite direction as the head.
• Inside the ampulla pressure exerted by endolymph deflects the cupula.
Angular head accelerations stimulate the canals.
cupula
crista
Macromechanical response of the cupula
• How a semicircular canal encodes head rotation can be understood using a mathematical model of a fluid-filled torsional pendulum.
Canal macromechanical response
10/23/14
5
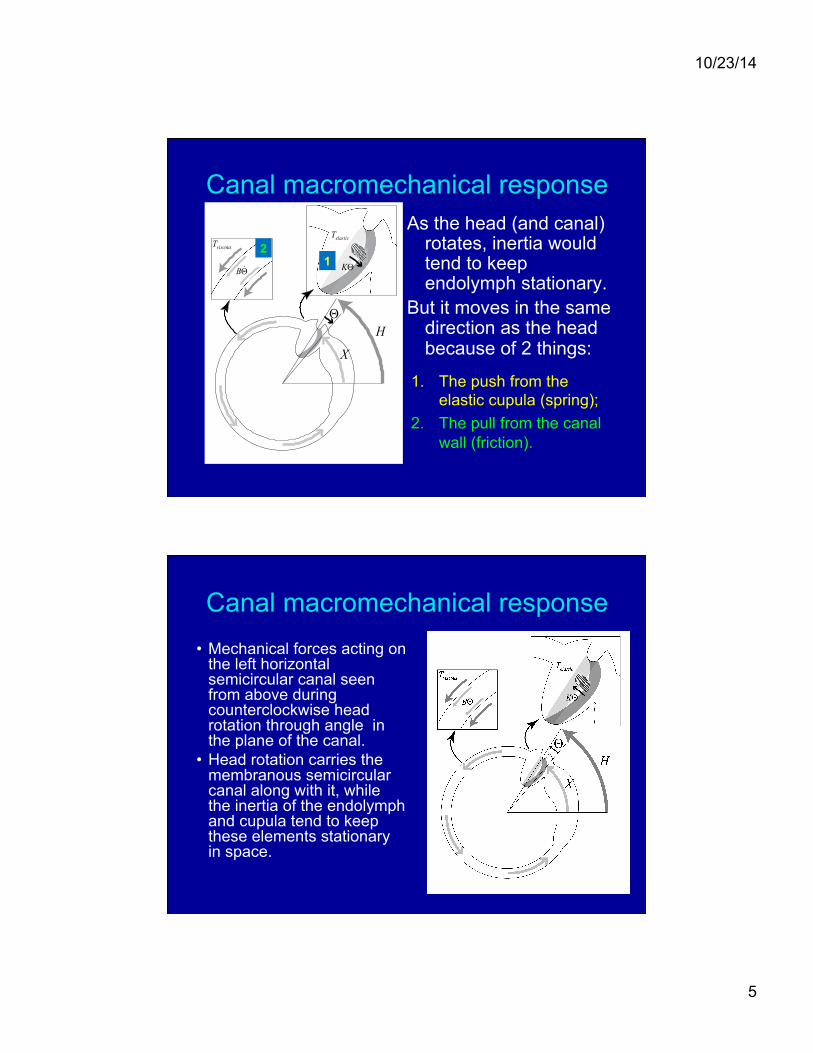
1. The push from the elastic cupula (spring);
2. The pull from the canal wall (friction).
As the head (and canal) rotates, inertia would tend to keep endolymph stationary.
But it moves in the same direction as the head because of 2 things:
1 2
Canal macromechanical response
Canal macromechanical response • Mechanical forces acting on
the left horizontal semicircular canal seen from above during counterclockwise head rotation through angle in the plane of the canal.
• Head rotation carries the membranous semicircular canal along with it, while the inertia of the endolymph and cupula tend to keep these elements stationary in space.

10/23/14
6
Canal macromechanical response
• Two things act to accelerate the endolymph in the same direction that the head is turning but through the smaller angle X(t).
• The first is the elastic or spring-like push from the distended cupula as it pushes against the endolymph.
• The second is the viscous drag exerted on the endolymph at its interface with the walls of the membranous canal.
• Newton’s 2nd law:
• Rotational equivalent
• For the rotating semicircular canal, the equation can be written:
Canal macromechanical response
F ma=∑
IαΤ =∑

10/23/14
7
Canal macromechanical response
• The elastic torque exerted by the cupula is proportional to the deflection of the cupula from its resting position (light gray). That deflection is given by the difference between how far the head moves in space and how far the endolymph moves in space:
).()()( tXtHt −=Θ
Canal macromechanical response
• Thus, the elastic torque is
).(tKTelastic Θ=

10/23/14
8
Canal macromechanical response
• The viscous torque is proportional to the velocity of the endolymph relative to the walls of the canal.
Canal macromechanical response
• Endolymph acceleration is…
• Therefore
10/23/14
9
Canal macromechanical response
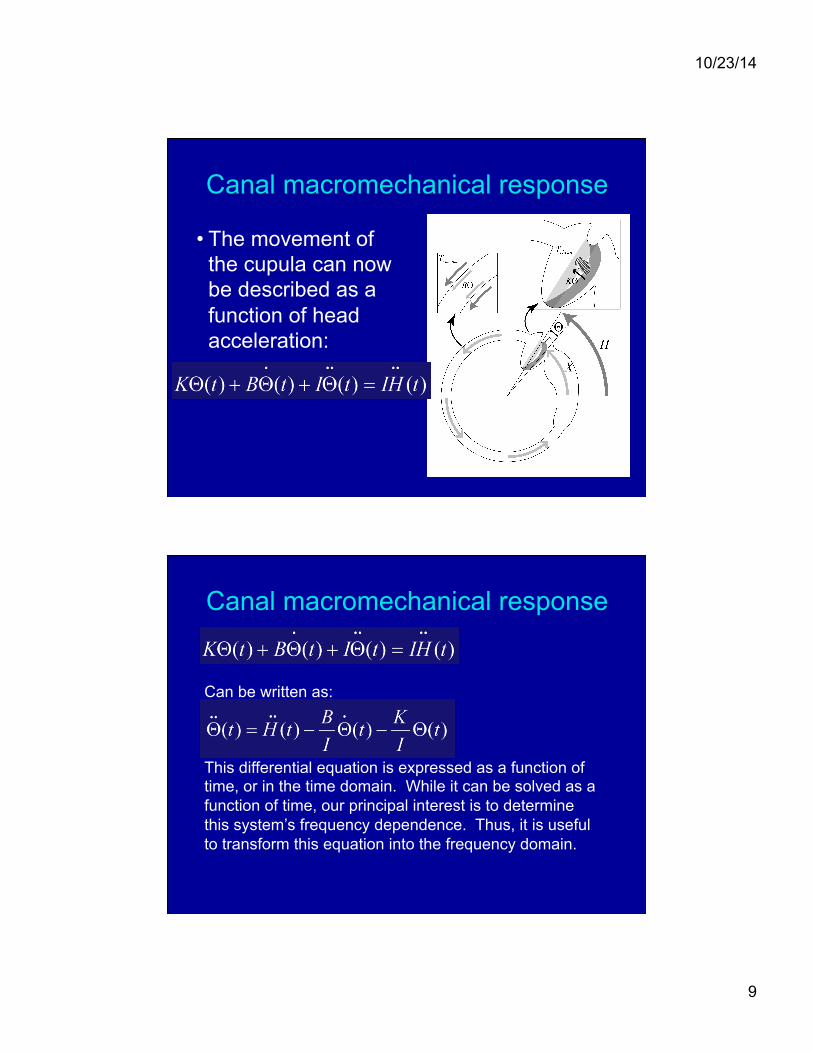
• The movement of the cupula can now be described as a function of head acceleration:
Canal macromechanical response
Can be written as:
This differential equation is expressed as a function of time, or in the time domain. While it can be solved as a function of time, our principal interest is to determine this system’s frequency dependence. Thus, it is useful to transform this equation into the frequency domain.

10/23/14
10
Why a solution in the frequency domain?
differential equation in time domain
algebraic equation in
frequency domain
solution in time domain
solution in frequency domain
frequency response (transfer function)
Transfer functions, which describe the input-output characteristics of systems across frequencies, are fundamental to the study of the auditory and vestibular systems.
Solution in the frequency domain
Although we use Laplace’s transform, credit for the conversion of time-domain equations into frequency-domain equations should really go to Oliver Heaviside (1850-1925).
• Hearing impaired from scarlet fever • Interest in telegraphy sparked by
his uncle, Charles Wheatstone
Oliver Heaviside

10/23/14
11
Solution in the frequency domain • Solved the problem of distortion in
long-distance telegraphy & telephony by introducing induction coils at intervals along the lines.
• Simplified Maxwell’s equations from 20 to 4
• Introduced “operator method” to solve differential equations, replacing “d/dt” with “p”, and treating the result algebraically
• Because Heaviside never proved the basis for his method, Laplace’s transform instead was accepted.
Oliver Heaviside
• For a function the Laplace transform is
where
is real, = √-1, and = angular frequency (f = 2πω)
• The Laplace transform essentially converts signals that vary in time into those that vary in frequency by using complex exponentials.
• This works because most natural signals can be represented as some combination of functions that have exponential growth or decay and sinusoidal oscillations.
Laplace transforms
ωσ js +=
ωσ js += ωσ js +=
tjAetF ω=)(
∫∞
−==0
)()}({)( dttFetFsf stL

10/23/14
12
Equations of the form tAetF σ=)(describe exponential growth or decay.
tjAetF ω=)(describe sinusoidal oscillations, because
)sin(cos tjtAAe tj ωωω +=
Thus, the complex exponential term )( ωσ je +−
encompasses most natural signals with decay and oscillations.
Those of the form
Two features of the Laplace transform make it of such practical use in converting differential equations to algebraic ones:
1. If
Laplace transforms
),()}({ sytY =L
That is, the Laplace transform of a derivative is just s times the Laplace transform of the function, minus the value of the function at time zero. The value at time zero is often zero. Thus, differentiation in the time domain becomes multiplication by s in the frequency domain.
10/23/14
13
Laplace transforms
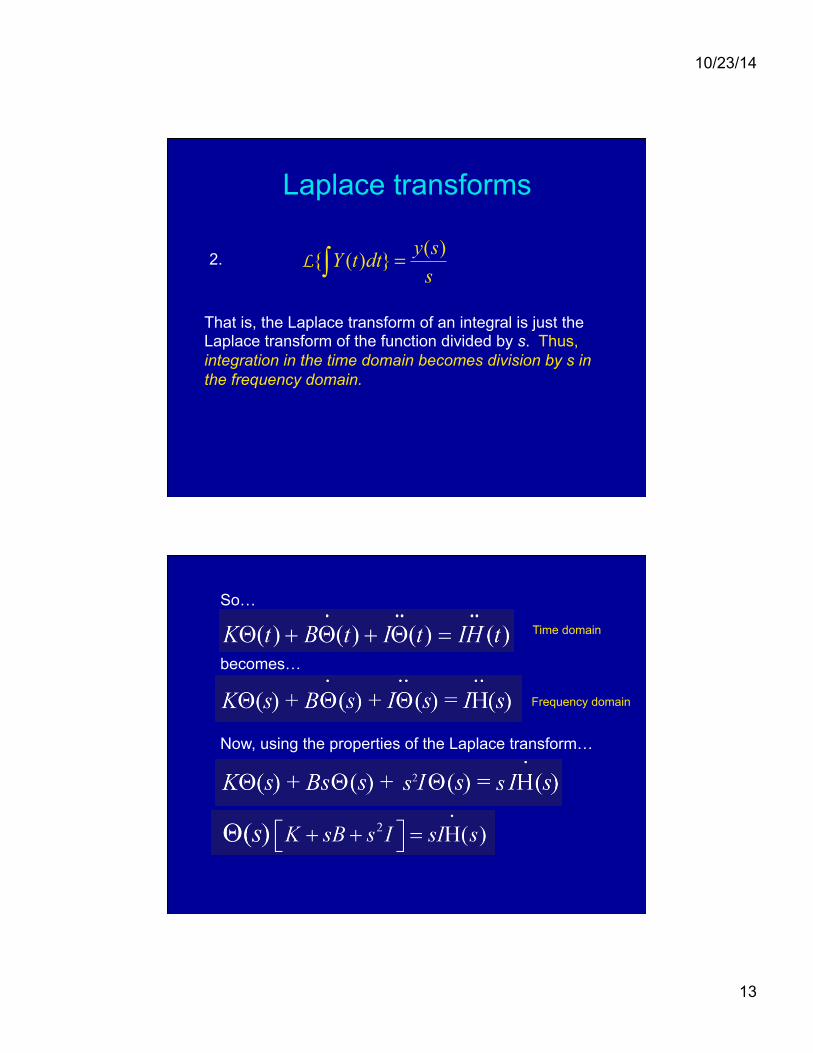
That is, the Laplace transform of an integral is just the Laplace transform of the function divided by s. Thus, integration in the time domain becomes division by s in the frequency domain.
.)(})({ssydttY =∫L2.
So…
becomes…
Time domain
Now, using the properties of the Laplace transform…
Frequency domain
10/23/14
14
2
sK Bs sI I
=+ +
Combining the different constants,
1 2KI
=τ τ 1 2BK
+ =τ τwhere and
1 2KI
=τ τ

10/23/14
15
Transfer function of the canal
Values for these time constants have been estimated at 1τ 0.006 sec
2τ 13 sec
short time constant
cupular time constant
and
1 2KI
=τ τ
θ(𝑠)/H (𝑠) = 0.08𝑠/(0.006𝑠+1)(13𝑠+1) = 0.08𝑠/0.08 𝑠↑2 +13𝑠+1
Frequency response
We wish to find out how the magnitude of the endolymph movement varies under varying frequencies of head movement. That is to say, we want to vary the frequency component of the complex variable and characterize the response magnitude, called the gain, of the transfer function.
jωs jσ ω= +

10/23/14
16
Frequency response
So the transfer function yields…..
10 (0.006 1)(13 1)20 log j
j jGain dB ω
ω ω+ +=
(0.006 1)(13 1)s
s s+ +
(Note: || indicates magnitude)
Frequency response
10 10 0.006 120 log 20 logj jGain dB dBω ω− +=
10 (0.006 1)(13 1)20 log j
j jGain dB ω
ω ω+ +=
10 13 120 log jdB ω− +
10 101 110.006
20 log 20 logj jGain dB dBω ω− +=
101 1113
20 log jdB ω− +

10/23/14
17
Frequency response
10 10
10
1 1167
1 1.077
20 log 20 log
20 log
j j
j
Gain dB dB
dB
ω ω
ω
− +
− +
=
The magnitude of a complex number, is . a bj+ 2 2a b+For the first term, then, the magnitude is simply:
1020 logGain dB ω=
Frequency response
10 10
10
1 1167
1 1.077
20 log 20 log
20 log
j j
j
Gain dB dB
dB
ω ω
ω
− +
− +
=
For the 2nd term the magnitude is:
21020 log ( ) 1167Gain dB ω= − +

10/23/14
18
Frequency response
10 10
10
1 1167
1 1.077
20 log 20 log
20 log
j j
j
Gain dB dB
dB
ω ω
ω
− +
− +
=
For the 3rd term the magnitude is:
21020 log ( ) 10.077Gain dB ω= − +
Frequency response 2
10 1020 log ( ) 10.07720 log dBGain dB ωω− +=
The 2nd and last term are both ~zero. The 1st term gives a 20dB/decade increase in gain.
When
21020 log ( ) 1167dB ω− +

10/23/14
19
Frequency response
The 2nd term now gives -20dB per decade, effectively canceling the first term. The 3rd term still gives no significant change in gain, so the gain remains flat in this range.
When
210 1020 log ( ) 10.07720 log dBGain dB ωω− +=
21020 log ( ) 1167dB ω− +
0.077 167ω< <
Frequency response
The 3rd term now gives -20dB/decade.
When
210 1020 log ( ) 10.07720 log dBGain dB ωω− +=
21020 log ( ) 1167dB ω− +

10/23/14
20
Frequency response
• Another important consideration is the phase of the response, a measure of its timing with respect to the stimulus waveform.
• A response that rises and falls in time with the stimulus is in phase with the stimulus (phase = 0 degrees). One that leads or lags the response is not in phase with the stimulus.
• Phase is determined for each term by the ratio of its imaginary to its real parts by the formula
arctan( / )imaginary realΦ =
0 0.077 167arctan( ) arctan( ) arctan( )ω ω ωΦ = − −
The phase behavior of the semicircular canal as frequency varies would therefore be:
For all frequencies, the first term approximates
arctan( ) 90degrees∞ = +
Frequency response 10 10
10
1 1167
1 1.077
20 log 20 log
20 log
j j
j
Gain dB dB
dB
ω ω
ω
− +
− +
=

10/23/14
21
• For frequencies << 0.077 radians/sec, the other terms are about zero.
• For frequencies >> 0.077 but << 167 radians/sec, the second term yields –90 degrees, canceling the first and giving an in-phase (0 degree) response.
• Finally, for frequencies >> 167 radians/sec, the third term gives another –90 degrees, taking the response out of phase again.
Frequency response
0 0.077 167arctan( ) arctan( ) arctan( )ω ω ωΦ = − −
Bode plot of the canal

10/23/14
22
Bode plot of the canal • CAREFUL!! This
transfer function is for
• i.e., for endolymph displacment as a function of head VELOCITY.
Bode plot of the canal • Over a wide range of
head movements (0.012-27 Hz), the canal gives a response that best represents head VELOCITY, even though acceleration is the stimulus. • The canal is a
mechanical integrator!

10/23/14
23
Bode plot of the canal
• But - note the poor performance of the canal at low frequencies.
• The brainstem makes up for this using “velocity storage.”
• This is probably accomplished using distributed circuits in medial vestibular nucleus and descending vestibular nucleus to perseverate signals in a “leaky integrator.”
• In modeling VS, essentially the short time constant of the canal is replaced by the long time constant of the VOR:
𝐻′ /𝐻 ↓𝑐 = 𝜏↓𝑣𝑜𝑟 (𝑠𝜏↓𝑐 +1)/𝜏↓𝑐 (𝑠𝜏↓𝑣𝑜𝑟 +1)
Velocity storage

10/23/14
24
• Post head-shaking nystagmus and post-rotatory nystagmus are consequences of velocity storage.
Velocity storage
An internal representation of head velocity
Robinson, 1981
• From head displacement H, we get to 𝐻′

10/23/14
25
An eye velocity command
Robinson, 1981
• Multiplying 𝐻′ by a gain of -1 gives an eye velocity command, 𝐸′
Mechanics of the eye plant • The elastic properties of the eye
muscles are such that at increasing angles of gaze more force is needed to overcome the elastic pull of the opposing muscle.
• Empirically:
∆𝑅↓𝑚 =𝑘𝐸(𝑡)+𝑟𝐸 (𝑡)
Changing to the Laplace domain:
∆𝑅↓𝑚 =𝑘𝐸(𝑠)+𝑟𝐸 (𝑠)
=𝑘𝐸(𝑠)+𝑟𝑠𝐸(𝑠)=𝐸(𝑠)[𝑘+𝑟𝑠]
𝐸(𝑠)/∆𝑅𝑚 = 1/𝑘+𝑟𝑠 = 1/𝜏↓𝑒 𝑠+1
10/23/14
26
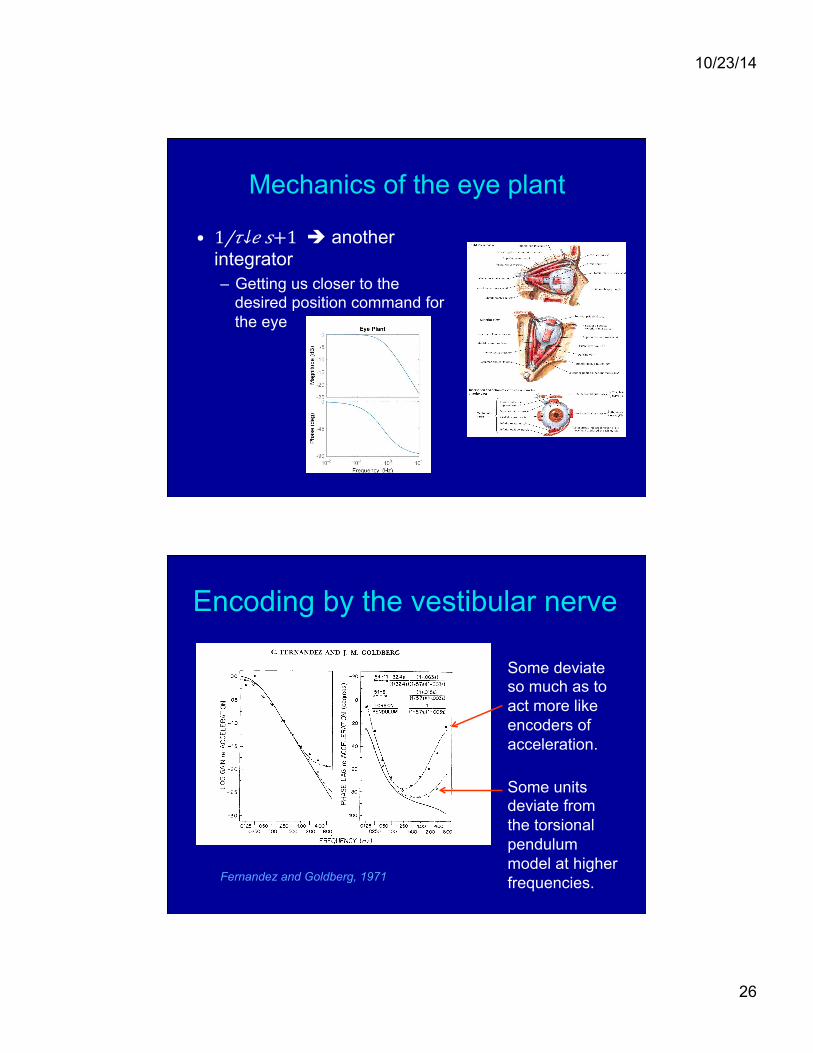
Mechanics of the eye plant
• 1/𝜏↓𝑒 𝑠+1 è another integrator – Getting us closer to the
desired position command for the eye
Encoding by the vestibular nerve
Some deviate so much as to act more like encoders of acceleration.
Some units deviate from the torsional pendulum model at higher frequencies. Fernandez and Goldberg, 1971

10/23/14
27
Average afferent response at high frequency is not explained by torsional pendulum model.
Fernandez and Goldberg, 1971
Encoding by the vestibular nerve
• Shift toward acceleration vs velocity suggests differentiation of the signal.
• Afferent adaptation to prolonged stimulation is responsible for this shift. Adaptation of canal afferent to
acceleration step.
Fernandez and Goldberg, 1971
Encoding by the vestibular nerve

10/23/14
28
• Modeling this afferent adaptation requires further differentiation in the transfer function:
Adaptation of canal afferent to acceleration step.
Fernandez and Goldberg, 1971
Torsional pendulum
Adaptation operator (low-freq phase lead)
Lead operator (high-freq phase lead)
𝐻(𝑠)= 1/(1+ 𝜏↓1 𝑠)(1+ 𝜏↓2 𝑠) ⋅ 𝜏↓𝐴 𝑠/(1+ 𝜏↓𝐴 𝑠) ⋅(1+ 𝜏↓𝐿 𝑠)
Encoding by the vestibular nerve
• We have seen that afferent behavior at high frequencies deviates from torsional pendulum model.
• Hypothesis: Maybe the afferents that are more velocity sensitive (regulars) preferentially project to the VOR centers, and those that are more acceleration sensitive project to spinal centers for dynamic load compensation?
Encoding by the vestibular nerve

10/23/14
29
• Dynamic load compensation – a nice idea, but data show little evidence for such channels in mammals.
Sato and Sasaki 1993
Encoding by the vestibular nerve
• Mechanical integrations (canal, eye plant) do not suffice to derive a position command yet.
Incomplete integrations in the periphery
• Central processing must accomplish an added integration.

10/23/14
30
The neural integrator
The neural integrator
• All of the oculomotor systems require compensation for the elastic restoring force of the eye muscles, which act like springs (F=kx).
• Thus, eye position must be specified as well as velocity, in the final command ∆𝑅↓𝑚 .

10/23/14
31
The neural integrator
• Position can be obtained from velocity by the neural integrator in the “indirect pathway.”
• 𝑇↓𝑛 is large,so the NI transfer function is essentially 1/𝑠 for that pathway.
The neural integrator
• For the direct pathway the gain is 𝑇↓𝑒1 • For both, the transfer function is ∆𝑅𝑚/𝐸′ = 𝑇↓𝑒1 + 1/𝑠 = 𝑠𝑇↓𝑒1 +1/𝑠

10/23/14
32
The neural integrator
• For a step input, the output is a combina3on of a step and ramp.
• The la9er maintains the muscle contrac3on at the new displacement to prevent the eye from sliding back in the orbit.
Robinson model

10/23/14
33
Robinson model • Predicts the features of
normal VOR with bilateral labyrinths intact.
• Does not predict non-linearities that arise with loss of function on one side.
• Does not include modifiable elements for adaptation, motor learning.
Lasker D M et al. J Neurophysiol 2000;83:2482-2496
©2000 by American Physiological Society
Lasker, Hullar & Minor model

10/23/14
34
Lasker D M et al. J Neurophysiol 2000;83:2482-2496
©2000 by American Physiological Society
Lasker, Hullar & Minor model • Nonlinear pathway
addition predicts the features of the VOR after unilateral loss of function.
Head thrust sign: • The examiner
sees stable eye position throughout HTT to good side.
• But there is a head thrust sign just after the HTT to the bad side.
Predicts the head thrust test

10/23/14
35
3D models • Required to
explain canal-otolith interactions and organization of VOR with respect to gravity.
Raphan and Cohen 2002
Related Documents











