1 Letecké laserové skenování Letecké laserové skenování Osnova : 0. Úvod 1. Schéma „LSS“ 2. Měření 3. Chyby měření 4. Zpracování měření 5. Aplikace 6. Komerčně dostupné systémy 7. Zhodnocení [1] Dolanský, T.: Lidary a letecké laserové skenování. Universita Jana Evangelisty Purkyně, Ústí nad Labem, 2004. ISBN 80-7044-575-0.

Letecké laserové skenování
Jan 05, 2016
Letecké laserové skenování. Osnova : 0. Úvod Schéma „LSS“ Měření Chyby měření Zpracování měření Aplikace Komerčně dostupné systémy Zhodnocení [1] Dolanský, T.: Lidary a letecké laserové skenování. Universita Jana Evangelisty Purkyně, Ústí nad Labem, 2004. ISBN 80-7044-575-0. 0. Úvod. - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Letecké laserové skenováníLetecké laserové skenování
Osnova :
0. Úvod1. Schéma „LSS“2. Měření3. Chyby měření 4. Zpracování měření5. Aplikace6. Komerčně dostupné systémy7. Zhodnocení
[1] Dolanský, T.: Lidary a letecké laserové skenování. Universita Jana Evangelisty Purkyně, Ústí nad Labem, 2004. ISBN 80-7044-575-0.

2
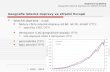
0. Úvod0. Úvod- původně vojenská technologie je známa 20 let,- masivní rozvoj proběhl až během posledních pěti let, kdy se
letecké laserové skenování dostalo i na území České a Slovenské republiky. Rychlost letu:
36 – 130 km/h
Výška letu: 60 – 960 m
Šířka záběru: 20 – 680m
Stopa svazku (0,1 – 3,8m)
d = 0,25 – 4,00 m
= 2d
- technologie je podobná terestrickému skenování, ale:
skener vytváří pouze profil, další rozměr skenování doplňuje letecký prostředek, neustálý, nestálý a rychlý pohyb skeneru přidává nutnost kontinuálního určování polohy (stanoviska), každý bod má své stanovisko,

3
0. Úvod0. ÚvodSkener:Skener:
- vysokorychlostní světelný (laserový) impulsní dálkoměr (některé systémy ho používají v kombinaci s fázovým měřením) s pasivním odrazem, schopný pracovat při frekvenci řádově v desítkách kHz,
- u většiny skenerů lze zaznamenat i echo (pořadové číslo odrazu). V praxi bývá vyhodnocen první a poslední odraz, reprezentující bod na DSM (Digital Surface Model) a DTM (Digital Terrain Model), ale v některých aplikacích se používají i další.
Metoda:Metoda:- umožňuje získávání velkého objemu dat v krátkém
časovém intervalu, ve spojení s poměrně vysokým stupněm automatizace jejich zpracování při vytváření digitálního modelu terénu a území. Oproti klasické fotogrammetrii je díky velké hustotě bodů použitelná s dostatečnou přesností i při získávání polohových údajů o objektech relativně malých rozměrů, jako jsou stožáry a vodiče elektrických přenosových soustav.

4
1. Schéma „LSS“1. Schéma „LSS“
Laserový skener
(Laser, optika, elektronika)
Určení polohy
(GPS, INS)
Doplňková data
(Kamera, videokamera, RGB nebo IR skener)
Záznam dat
(PC + periférie)
Určení polohy
(GPS referenční stanice)
Palubní přístroje Pozemní přístroje

5
1. Schéma „LSS“1. Schéma „LSS“Inerciální navigační systém:Inerciální navigační systém:- využívá obvykle tří gyroskopů (určení náklonů) a tří
akcelerometrů (určení zrychlení) pro určení rozdílů polohy a natočení. Protože to není nekonečně přesně a v nekonečně krátké době, hromadí se chyba a proto je systém využíván pro určení polohy v mezích mezi dvěma určeními polohy GPS (obvykle 0,5 s).
Měření vzdálenosti:Měření vzdálenosti: - pro měření vzdálenosti se obvykle používají jako zdroje
záření lasery s vlnovou délkou emitovaného záření 1100 až 1200 nm. Vyšle se krátký puls záření (10 - 15 ns), na základě měření času návratu pulsu se určuje vzdálenost. Díky své ploše se svazek paprsků odráží od vrstev či hran v různé výšce, jako např. vegetace – strom, vegetace – křoviny, zemský povrch, a proto skener získá více odrazů a tedy více vzdáleností. Některé systémy dokáží registrovat až 5 odrazů, obvykle se používají 3.

6
1. Schéma „LSS“1. Schéma „LSS“
Měření vzdálenosti:Měření vzdálenosti:

7
1. Schéma „LSS“1. Schéma „LSS“

8
1. Schéma „LSS“1. Schéma „LSS“

9
2. Měření2. MěřeníLetadlo Letadlo ×× Vrtulník Vrtulník- pro určování digitálního modelu terénu a měření plošných
území bývá laserový systém instalován v letadle, při měření objektů, kde je požadována větší přesnost a hustota bodů je nutné nainstalovat systém do vrtulníku.
Letadlo:Letadlo:- létá zpravidla ve výšce od 200 do 1600 metrů rychlostí
kolem 200 km/h. Odstup laserových stop je tedy asi 0,4 m v podélném, a 2 m v příčném směru (Toposys). Absolutní přesnost měřených bodů se pohybuje v rozmezí 0,1 – 0,3 m.
Vrtulník:Vrtulník:- nabízí možnost letět výrazně pomaleji než letadlo a i ve
velmi malé výšce. Hustota bodů může tedy být několikanásobně vyšší.
- hustota bodů spolu s přesností, která např. pro systém FLI-MAP (Fugro) je 4 – 7 cm, umožňuje využití i v inženýrské geodézii.

10
2. Měření2. MěřeníVyzařovací úhel:- Liší se podle jednotlivých skenovacích systémů. V praxi
existují systémy s vyzařovacím úhlem 14° (Toposys), 20° nebo 40° (Saab TopEye), ale také 60° (Fugro).
Průměr stopy svazku paprsků se pohybuje v rozmezí 0,1 až 3,8 m, v závislosti na systému a výšce letu.

11
3. Chyby měření3. Chyby měření
Kalibrace:Kalibrace:
- jedná o velmi složitý systém, je třeba pravidelně provádět kalibraci jednotlivých komponent i celého systému.
- předletová (hlavně nastavení jednotlivých komponent systému do správného funkčního stavu),
- poletová (hlavně určení prostorových vztahů jednotlivých komponent, resp. možnost zjištění a zpětné odstranění systematických chyb skeneru).
Chyby měření Chyby měření „vnější“„vnější“::- chyby GPS,- chyby INS.

12
3. Chyby měření3. Chyby měřeníChyba laseruChyba laseru – vyslání pulsu v chybný čas.
Chyba detektoru Chyba detektoru – detekce slabého odrazu (šum),– detekce příliš silného odrazu (saturace, měří kratší délky),
Chyba hodin Chyba hodin – chyba měření času systémovými hodinami, která má
obvykle vzestupnou tendenci, lze ji matematický modelovat a zavádět do výpočtu,
– časové zpoždění v řídící jednotce, jejímž výsledkem je systematická chyba v poloze.
Chyby zrcadlaChyby zrcadla– chyba určení úhlu zrcadla,– torze oscilujícího zrcadla (kroucení osy vlivem hybnosti =
setrvačnosti zrcadla).

13
3. Chyby měření3. Chyby měřeníChyby integraceChyby integrace– chyby řídící a kontrolní jednotky, hlavně nesplnění toho, že
všechna měření musí být vztažena ke stejné časové ose, protože každá komponenta má obvykle své hodiny.
Vliv atmosféryVliv atmosféry– dráha svazku paprsků není přímková, ale jedná se o
prostorovou křivku, tj. měří se delší vzdálenost než je správná,
– vliv atmosférické refrakce je nejmenší ve směru kolmo k Zemi, největší na okrajích skenovaného pásu (kulové rozložení teplot, index lomu je nejvíc závislý na teplotě atmosféry),– potlačuje se pomocí modelů.

14
4. Zpracování měření4. Zpracování měřeníData získaná ze skeneru jsou velmi nepřehledná (mimo jiné 2 a více odrazů) a obsahují chyby či šum. Proto je nutné je automaticky předzpracovat. Jsou-li u pozemních skenerů mračna o velikosti miliónů bodů, u leteckého skenování mohou být více než řádově větší.Podle komplexnosti se předzpracování dělí na Filtraci a Klasifikaci.
FiltraceFiltrace= nalezení bodů jednoho povrchu. Provádí se např. za znalosti přibližného průběhu terénu a nebo s ohledem na okolní body. - morfologické filtry, - filtry porovnávající sklon, - filtr region growing, - lineární predikce.

15
4. Zpracování měření4. Zpracování měření
KlasifikaceKlasifikace= Pro rozsáhlejší práce je vhodné provést automatickou klasifikaci, tj. rozdělené bodů do tříd podle druhu objektu, na kterém leží. Často se provádí na základě výškových poměrů okolních bodů, intenzity signálu či doplňkových hodnot např. z kamery nebo RGB skeneru. Klasifikace probíhá ve více cyklech, kdy se v jednom cyklu vybírají body jedné třídy. Další cyklus již probíhá bez již klasifikovaných bodů. Obvykle se používají třídy:
- terén,- budovy,- vegetace,- chyby,
dále např. body pod terénem, nízká vegetace, vysoká vegetace,komunikace, výšková vedení, body terénní kostry + další podle účelu zpracování.

16
4. Zpracování měření4. Zpracování měření
Klasifikace Klasifikace - příklad neklasifikovaných a klasifikovaných dat
Viditelné třídy:
- budovy,- vegetace.- el. vedení.

17
5. Aplikace5. Aplikace
Tvorba DMTTvorba DMTVytváří se obvykle z klasifikovaných bodů třídy „povrch“.

18
5. Aplikace5. Aplikace
Tvorba DMTTvorba DMT

19
DSM a profily
Území cca. 700 m x 700 m
profile 1
profile 2
P1
P2
Vizualizovaný řez DSM

20
5. Aplikace5. Aplikace
3D modely3D modelyDoplňují se často texturami fasád, jsou vhodné pro plánování ve městech, vedení, viditelnost, architektonické studie. Probíhá v současné době i v Praze v IMIPu (vzhledem k jeho rušení to ovšem nemá zřejmě perspektivu).

21
5. Aplikace5. Aplikace
3D modely3D modely

22
5. Aplikace5. Aplikace
Mapování komunikacíMapování komunikacíPohled na klasifikované bodové mračno části dálnice. Data byla pořízena systémem FLIMAP, hustota skenování je asi 14 bodu na m2.

23
5. Aplikace5. Aplikace
Mapování komunikacíMapování komunikacíŘez dálničním tělesem v místě, kde je přemostěn lávkou pro chodce a cyklisty. Body byly pořízeny systémem FLIMAP a klasifikovány v grafickém prostředí TerraScan.

24
5. Aplikace5. Aplikace
Mapování komunikacíMapování komunikacíPohled shora na klasifikovaná data železniční stanice. Data pochází ze zkušební kampaně organizované společností GEODIS BRNO, s.r.o. a byla pořízena systémem FLIMAP.

25
5. Aplikace5. Aplikace
Mapování průběhu vedeníMapování průběhu vedeníPohled na výstup vodičů z rozvodny

26
5. Aplikace5. Aplikace
Mapování průběhu vedeníMapování průběhu vedeníStožár elektrického vedení v programu FLIP7 – mračno bodů

27
5. Aplikace5. Aplikace
Mapování průběhu vedeníMapování průběhu vedení

příčný řezpodélný profil
pohled,0,5 m rastr DSM
Část elektrického vedení vysokého napětí

29
5. Aplikace5. Aplikace
Mapování vegetaceMapování vegetaceS výhodou se využívá několikanásobného odrazu v biometrických analýzách, např. měření objemu biomasy v lesních porostech. Určuje se např. objem, poškození, druhové zastoupení, výška porostu nebo dokonce počet stromů.
Mapování pobřeží a v blízkosti vodních plochMapování pobřeží a v blízkosti vodních plochVelmi specifické práce, většinou se mapují nejen pobřeží, ale také pobřežní vody s určením povrchu dna. Infračervené spektrum je vodou téměř zcela pohlcováno a proto se využívají jiné vlnové délky, hlavně zelená nebo modrozelená barva. Často se měří infračerveným i alternativním laserem současně (DIAL = Differential Absorption Laser), infračervený mapuje hladinu, alternativní dno. Teoreticky za vhodných podmínek (klidná hladina, průzračná voda) lze mapovat až do hloubky 50 m.

30
6. Komerčně dostupné sytémy6. Komerčně dostupné sytémy
HardwareHardwareLeica Geosystems - ALS50IGI - LiteMapper 1400, LiteMapper 2800Optech - ALTM 3100SHOALS - SHOALS 1000 (duální lidar pro mapování
pobřežních vod)TopoSys - Falcon IIRiegl - LMS-Q140i, LMS-Q280i
SoftwareSoftwareLeica Geosystems - Socet SetIGI - Las Tool GeocodeTopoSys - ToPIT

31
7. Zhodnocení7. Zhodnocení
Letecké laserové skenovací systémy přinášejí dříve nedosažitelné možnosti sběru prostorových dat v obrovském měřítku a také pro obvyklé práce slušnou míru automatizace. Nevýhodou je opět vysoká pořizovací cena aparatury (v to počítaje i letecký prostředek a jeho provoz). Pro nasazení ve velkých oblastech může nahradit fotogrammetrii a např. v oblasti zaměřování elektrických vedení se prosazuje i u nás (Geodis Brno), přestože jinak se Česká republika pro nasazení resp. zakoupení těchto technologií nehodí, není zde dostatečně rozsáhlý trh a navíc jsou zde historicky dostupné podklady, které ubírají část zákazníků.

32
…KONEC …
Related Documents