-
8/13/2019 Interfacing 8051
1/23
INTERFACING 8051
UNIT-8 INTERFACING 8051
STEPPER MOTOR INTERFACING:
Interfacing the Stepper motor to the 8051 is done to controlof angle and direction
of rotation
A stepper motor is a !idel" #sed de$ice that translates electrical p#lses intomechanical mo$ement
Applications
As disc dri$es In dot matri% printers
In ro&otics for position control
Tp!s o" st!pp!r #otor
'ermanent magnet
(aria&le Rel#ctance
'ermanent magnet Stepper motor consists of t!o parts
1 Rotor )shaft*+a permanent magnet
, Stator -s#rro#nds the rotor as sho!n in fig )a*
Fig )a*
(eenaS. /IT /"sore 1
-
8/13/2019 Interfacing 8051
2/23
INTERFACING 8051
The most common steppers ha$e fo#r stator !indings that are paired !ith a
center+tapped common as sho!n in fig)&* This t"pe of stepper motor is
commonl" reffered to as a fo#r+phase or #nipolar stepper motor The center+tapallo!s a change of c#rrent direction in each of t!o coils !hen a !inding is
gro#nded res#lting in a polarit" change of the stator
Fig )&*
The stepper motor shaft mo$es in a fi%ed repeata&le increment !hich allo!s one
to mo$e it to a precise position
The stator poles are determined &" the c#rrent sent thro#gh the !ire coils
As the direction of the c#rrent is changed the polarit" is also changed ca#sing the
re$erse motion of the rotor
The stepper motor disc#ssed here has a total of leads2 3 leads representing the
fo#r stator !indings and , commons for the center+tapped leads
As the se4#ence of po!er is applied to each stator !indingthe rotor !ill rotate
There are se$eral !idel" #sed se4#ences !here each has a different degree of
precision
(eenaS. /IT /"sore ,
-
8/13/2019 Interfacing 8051
3/23
INTERFACING 8051
Ta&le &elo! sho!s a ,+phase ) , !indings are energied at a time*3+step stepping
se4#ence
6e can start !ith an" of the se4#ences in the a&o$e ta&le once !e start !e m#st contin#e
in the proper order
For e%ample if !e start !ith st!p$%0110& !e m#st contin#e in the se4#ence of steps31,731,etc
Step angle is the minim#m degree of rotation associated !ith a single step
Step per re$ol#tion is the total n#m&er of steps needed to rotate one complete
rotation or 70 degrees) eg 180steps, degrees970*
(ario#s motors ha$e different step angles
Ta&le &elo! sho!s some step angles for $ario#s motors
Step angle Step per re$ol#tion:, 500
18 ,00
,0 180
,5 133
50 :,
:5 38
15 ,3
St!ps p!r s!con' an' rp# r!lation
0
re$ol#tion;stepsrpmondsec;steps
=
(eenaS. /IT /"sore 7
-
8/13/2019 Interfacing 8051
4/23
INTERFACING 8051
T(! "o)r st!p s!*)!nc! an' n)#+!r o" t!!t( on rotor:
After completing e$er" "o)r st!ps the rotor mo$es onl" on! toot( pitc(
In a stepper motor !ith ,00 steps per re$ol#tion the rotor has 50 teeth since
3509,00 steps are needed to complete one re$ol#tion
The smaller the step angle the more teeth the rotor passes
E,a#pl!:
Gi$e the n#m&er of times the 3+step se4#ence m#st &e applied to a stepper motor to ma
-
8/13/2019 Interfacing 8051
5/23
INTERFACING 8051
Unipolar !rs)s +ipolar st!pp!r #otor int!r"ac!:
There are three common t"pes of stepper motor interfacing2 #ni$ersal #nipolar
and &ipolar The" can &e identified &" the n#m&er of connections to the motor
A #ni$ersal stepper motor has 8 connections #nipolar stepper motor has connections And &ipolar stepper motor has 3 connectionsas sho!n in fig &elo!
The #ni$ersal stepper motor can &e config#red for all three modes !hile the
#nipolar can &e either #nipolar or &ipolar and the &ipolar cannot &e config#red for#ni$ersal nor #nipolar mode
Int!r "acin2 )nipolar st!pp!r #otor to 8051:
Controllin2 st!pp!r #otor ia optoisolator
(eenaS. /IT /"sore 5
-
8/13/2019 Interfacing 8051
6/23
INTERFACING 8051
A&o$e fig#re sho!s an interface to a #ni$ersal stepper motor #sing optoisolator!hich are !idel" #sed to isolate the stepper motor=s &ac< E/F $oltage ie to
protect from damaging the digital;microcontroller s"stem
The fo#r leads of the stator !inding are controlled &" fo#r &its of the 8051
port)p10+p17*
Since the 8051 lac?N,007 to energise the stator
Instead of >?N,007 !e can also #se transistor as dri$ersas sho!n in fig#re
&elo!
(eenaS. /IT /"sore
-
8/13/2019 Interfacing 8051
7/23
INTERFACING 8051
If the transistors are #sed as dri$ers !e m#st also #se diodes to ta?N,007 has aninternal diode to ta
-
8/13/2019 Interfacing 8051
8/23
INTERFACING 8051
Fig)a*
Fig#re &elo! sho!s the s!itch config#ration for t#rning the motor in onedirection
6hen s!itches 1 and 3 are closed the c#rrent is allo!ed to pass thro#gh the
motor cloc
6hen s!itches , and 7 are closed the c#rrent is allo!ed to pass thro#gh the
motor co#ntercloc
Fig#re &elo! sho!s the in$alid config#ration C#rrent flo!s directl" to gro#nd
creating a short circ#it
(eenaS. /IT /"sore 8
-
8/13/2019 Interfacing 8051
9/23
INTERFACING 8051
The same effect )in$alid state*occ#rs !hen s!itches 1 and 7 are closed ors!itches ,and 3 closed
P)ls! 7i't( #o')lation%P4M&
The speed of the motor depends on three factors2
1* load ,* $oltage and 7*c#rrent
For a gi$en fi%ed load !e can maintain a stead" speed &" #sing a method called
p#lse !idth mod#lation)'6/*
" changing )mod#lating* the !idth of the p#lse applied to the @C motor !e can
increase or decrease the amo#nt of po!er pro$ided to the motor ther&" increasing
or decreasing the motor speedie !ider the p#lse higher the speed
Fig#re &elo! sho!s the '6/ comparisions
3C #otor control 7it( optoisolator:
Fig#res &elo! sho!s the connections to a simple @Cmotor #sing a &ipolar and a
/SFET transistor
The 8051 is protected from E/I created &" motor &r#shes &" #sing an optoisolator and a
separate po!er s#ppl"
(eenaS. /IT /"sore D
-
8/13/2019 Interfacing 8051
10/23
INTERFACING 8051
Separate po!er s#pplies to the motor and logic !ill red#ce the posi&ilit" of damage to the
control circ#itr" And also allo!s the #se of high+$oltage motors
The deco#pling capacitor across the motor helps to red#ce the E/I created &" the motor
The ener diode is #sed to red#ce gate $oltage &elo! the rated ma%im#m$al#e
1*!rite a program to monitor the stat#s of the s!itch and perform the follo!ing )a* if S691 the @C motor mo$es co#ntercloc
)&* if S690 the @C motor mo$es cloc
Sol#tion2
rg 0000h/AIN2 C?R '10
C?R '11 C?R '1,
SET',:
/NITIR2 SET '10
N ',: C?C.6ISE
C?R '11
SET '1,
S/' /NITR
C?C.6ISE2 SET '11 C?R '1,
S/' /NITR
EN@
(eenaS. /IT /"sore 10
-
8/13/2019 Interfacing 8051
11/23
INTERFACING 8051
,*!rite a program to monitor the stat#s of the s!itch and perform the follo!ing
)a* if p,:91 the @C motor mo$es !ith ,5 d#t" c"cle p#lse )&* if p,:90 the @C motor mo$es !ith 50 d#t" c"cle p#lse
Sol#tion2 rg 0000h/ain2
C?R '10
SET ',:
/NITR2
N ',: FIFT'ERCENT Hif p,:91 follo! the ne%t instr#ction if p,:90 go to la&el fift"percent
SET '10
/( R5,5
ACA?? @E?A C?R '10
/( R5:5 ACA?? @E?A
S/' /NITR
FIFT'ERCENT2
SET '10
/( R550
ACA?? @E?A C?R '10
/( R550
ACA?? @E?A
S/' /NITR
@E?A2
/( R, FF
?12 /( R7 FF ?,2 @NJ R7 ?,
@NJ R, ?1
RET EN@
3AC INTERFACE
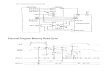
@igital to analog con$erters)@AC* is a de$ice !idel" #sed to con$ert digital p#lses toanalog signals
The first criterion for K#dging a @ACis its resol#tion !hich is a f#nction of then#m&er of &inar" inp#ts
R!sol)tion2 This is the n#m&er of possi&le o#tp#t le$els the @AC is designed to
reprod#ce This is #s#all" stated as the n#m&er of&itsit #ses !hich is the &aset!o logarithmof the n#m&er of le$els For instance a 1 &it @AC is designed to
reprod#ce , ),1* le$els !hile an 8 &it @AC is designed for ,5 ), 8* le$els
(eenaS. /IT /"sore 11
http://en.wikipedia.org/wiki/Bithttp://en.wikipedia.org/wiki/Logarithmhttp://en.wikipedia.org/wiki/Bithttp://en.wikipedia.org/wiki/Logarithm -
8/13/2019 Interfacing 8051
12/23
INTERFACING 8051
An 8+&it @AC s#ch as @AC 0808 pro$ides ,5 discrete $oltages )or c#rrent*
le$els of o#tp#t similarl" 1,+&it @AC pro$ides 30D discrete $oltage le$els
The digital inp#t are con$erted to c)rr!ntIo#t L &" connecting a r!sistor to the
Io#t pin !e con$ert the res#lt to olta2!
i! Io)tR9o)t
The total c#rrent pro$ided &" the Io#t pin is a f#nction of the &inar" n#m&er atthe @o+@:
*)IrefIo#t,5
1@
1,8
1@
3
,@
7,
7@
1
3@
8
5@
3
@
,
:@+++++++=
The Iref c#rrent is generall" set to ,mA
calc#late (o#t for the follo!ing &inar" inp#t
1*10011001&,* 11001000& ass#me resistance95.ohms
Sol#tion2
1*
1D1m,*)m,Io#t,5
157
,5
1
1,8
0
3
0
7,
1
1
1
8
0
3
0
,
1==+++++++=
$D:55
-
8/13/2019 Interfacing 8051
13/23
INTERFACING 8051
Inp#t $al#es for @AC for $ario#s angles is calc#lated and sho!n as in ta&le &elo! for
step angle 70 degree
Angle sin 9o)t5%5sin &
3AC inp)t al)!s
%1;81;8 sin &
'!ci#al
Inp#t $al#es in(!,
0 0 5 1,8 80
70 5 :5 1D, C0
0 8 D77 ,78 EE
D0 10 10 ,55 FF
1,0 8 D77 ,78 EE
150 5 :5 1D, C0
180 0 5 1,8 80
,10 +5 ,5 3 30
,30 +8 : 1: 11
,:0 +10 0 0 0
700 +8 : 1: 11
770 +5 ,5 3 3070 0 5 1,8 80
C 'rogram to generate a sine !a$e of step angle70 degree
incl#dereg51hO
Sfr dacdata9'1H(oid main) *
P
>nsigned char !a$e$al#eQ1,9P1,81D,,78,55,781D,1,831:01:3H
>nsigned char %H
6hile)1*P
For )%90H %1,H %MM*
@acdata 9 !a$e$al#eQ%H
C 'rogram to generate a triangle !a$e
(eenaS. /IT /"sore 17
3AC inp)t al)!s 1;81;8 sin
-
8/13/2019 Interfacing 8051
14/23
INTERFACING 8051
incl#dereg51hO
(oid main) *
>nsigned char co#ntH
P
6hile)1*
P For )co#nt90H co#nt90%ffH co#ntMM*
'09co#ntH
P
For)co#nt90%ffH co#ntO0Hco#nt++* '09co#ntH
C 'rogram to generate s4#are !a$e incl#dereg51hO
(oid main) *>nsigned char co#ntH
P
6hile)1*
P
'090%00H For)%90H %1,50H %MM*
P
'090%ffH
For)%90H %1,50H %MM*
8051 conn!ction to 3AC8082
(eenaS. /IT /"sore 13
-
8/13/2019 Interfacing 8051
15/23
INTERFACING 8051
Fig#re sho!s the generation of c#rrent reference setting Iref9,mA L&" #sing the
standard 5$ po!er s#ppl" L 1< or 15< ohm resistors
Con$ert this c#rrent to $oltage and monitor the o#tp#t on scope
Ideall" !e connect the o#tp#t pin Io#t to a resistor
#t this resistor affect the o#tp#t $oltage For this reason Iref c#rrent o#tp#t is isolat!'&" connecting it to an op+amp s#ch
as :31 !ith Rf95
-
8/13/2019 Interfacing 8051
16/23
INTERFACING 8051
>E?6OAR3 INTERFACING:
.e"&oard L?C@s are the most !idel" #sed inp#t;o#tp#t de$ices of the 8051
.e"&oards are organied in a matri% of ro!s and col#mns
The 8051 C'> accesses &oth ro!s and col#mns thro#gh , 8+&it ports an 88
matri% of
-
8/13/2019 Interfacing 8051
17/23
INTERFACING 8051
6hen a
-
8/13/2019 Interfacing 8051
18/23
INTERFACING 8051
EUA/'?E2
From Fig identif" the ro! and col#mn of the pressed
-
8/13/2019 Interfacing 8051
19/23
INTERFACING 8051
Fig &2Flo!chart for detection and identification of
-
8/13/2019 Interfacing 8051
20/23
INTERFACING 8051
.C3 INTERFACING:
In recent "ears the ?C@ is finding !idespread #se replacing ?E@s )se$en segment* d#eto the follo!ing reasons2
1 The declining prices of ?C@s
, The a&ilit" to displa" n#m&ers characters and graphics7 Ease of programming for characters and graphics
The ?C@ descri&ed in this chapter has 13 pins The f#nction of each pin is gi$en in ta&le&elo!
(eenaS. /IT /"sore ,0
-
8/13/2019 Interfacing 8051
21/23
INTERFACING 8051
9CCB 9SS 9EE: %pin 1B;$&
(CC (SS pro$ide M5( and gro#nd respecti$el"
(EE is #sed for controlling lcd contrast
RS- R!2ist!r s!l!ct %pin D&:
If RS0Bthe instr#ction command code register is selected !hich
Allo!s the #ser to send a command s#ch as clear displa" c#rser at home etc
ta&le 1 &elo! lists the instr#ction command codes
If RS1B the data register is selected !hich Allo!s the #ser to send data to &e
displa"ed on the ?C@
To displa" letters and n#m&ers !e send ASCII codes for the letters A+J a+
and n#m&ers 0+D to 8+&it data pins )@0+@:* !hile ma
-
8/13/2019 Interfacing 8051
22/23
INTERFACING 8051
fig d sho!s ?C@ timing to !rite)B+? for E pin*
Ta+l! 1 : .C3 co##an' co'!s2
(eenaS. /IT /"sore ,,
-
8/13/2019 Interfacing 8051
23/23
INTERFACING 8051