IN2305-II Embedded Programming prof.dr.ir. Arjan J.C. van Gemund Embedded Software Lab Software Technology Dept.

IN2305-II Embedded Programming
Jan 01, 2016
IN2305-II Embedded Programming. prof.dr.ir. Arjan J.C. van Gemund Embedded Software Lab Software Technology Dept. Arjan van Gemund?. BS Physics Engineering MS, PhD Computer Science DSM (Embedded Systems HW + SW) TNO (High-Performance Computing) TUD (EE, Computer Architecture) - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
IN2305-IIEmbedded Programming
prof.dr.ir. Arjan J.C. van Gemund
Embedded Software LabSoftware Technology Dept.
in2305-II: L1 2
Arjan van Gemund?
BS Physics EngineeringMS, PhD Computer Science
DSM (Embedded Systems HW + SW)TNO (High-Performance Computing)TUD (EE, Computer Architecture)TUD (CS, Software Technology, 0.4 fte Prof Emb SW)
2 kids, dog, cat, living in Ravenswoud (Fr)http://www.st.ewi.tudelft.nl/~gemund/
in2305-II: L1 3
In2305-ii?
Info: via http://www.st.ewi.tudelft.nl/~gemund/

in2305-II: L1 4
Embedded Systems?
ES = computer system (HW+SW) embedded within another system largely determining its functionality
printingsystem
user I/F
printer
netw I/F

in2305-II: L1 5
Telegraph
out-of-order datanegotiate with multiple clients (print jobs)service status requestsadapt to different printersresponse time to certain requestsdata throughput / buffering
Telegraphnetwork printer
in2305-II: L1 6
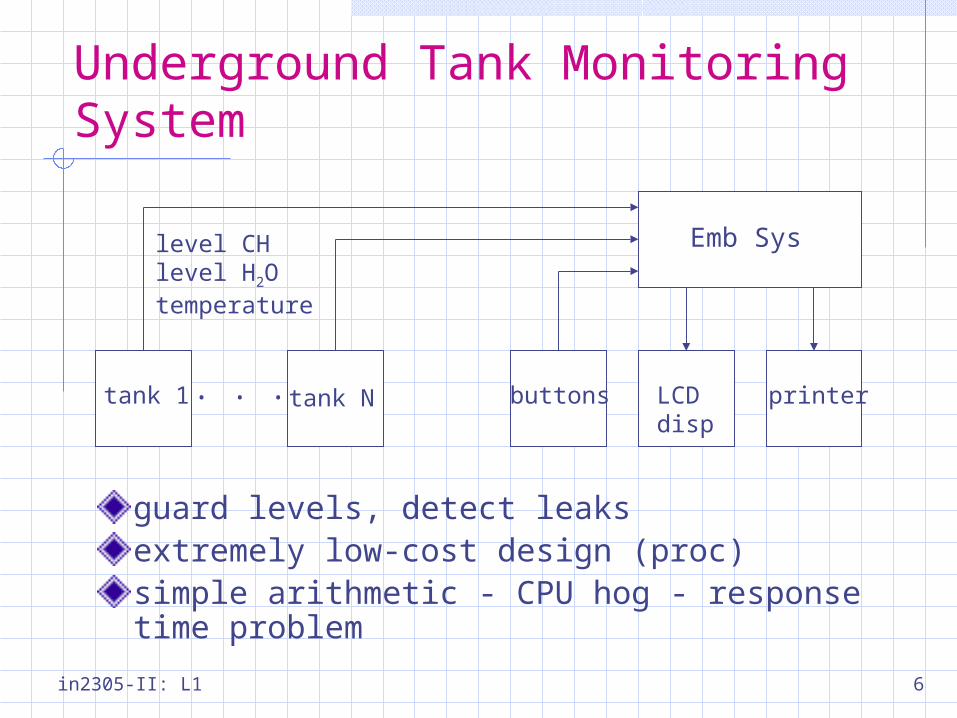
Underground Tank Monitoring System
guard levels, detect leaksextremely low-cost design (proc)simple arithmetic - CPU hog - response time problem
tank 1 tank N
Emb Sys
buttons LCDdisp
printer. . .
level CHlevel H2Otemperature

in2305-II: L1 7
Cruise Control System (Lab Project)
stabilize car speed when engagedextremely low processor cycle budgetsmall control loop jitter due to other activitiesreliable operation
speedometer
gas pedal
Emb Sys
buttons SSD
in2305-II: L1 8
Embedded Systems Boom
provides functionality (intelligence) of almost everythingannual growth 25-60% (Emb Linux > 60%)100 x PC marketaccounts for 25-40% costs in automotivevery large societal dependencevery high performance demands
in2305-II: L1 9
Embedded Software Crisisfunctionality migrates from HW to SWexisting cores combined with FPGA’s, rather than ASICsprogramming-centered design (incl. HDLs)TV, mobile, car, .. 10+ MLOC code, expon. growth!despite SW engineering: 1 – 10 bug / KLOC100 G$ / yr on bugs (Mars Polar Lander, Mars Climate Orbiter, Ariane 5, Patriot, USS Yorktown, Therac-25, ... )
in2305-II: L1 10
Embedded Programming
more difficult than “classical” programming interaction with hardware real-time issues (timing)concurrency (multiple threads, scheduling, deadlock)need to understand underlying RTOS principlesevent-driven programming (interrupts)
lots of (novice) errors (hence the crisis)so that’s why we have this course already in 2nd year
in2305-II: L1 11
Example
naïve automatic door task (thread):
for (;;) { while (inp(sensor) != 1) ; // wait to open out(door,OPEN); while (inp(sensor) == 0) ; // wait to close sleep(1000); out(door,CLOSE); // close after timeout}
what are the (many) issues? (discussed on the next slides)

in2305-II: L1 12
Specification: FSM (Moore)
0: door’, timer_enable’1: door, timer_enable’2: door, timer_enable
s = sensor, t = timeout
s’
10
s
2
ss’
s
s’
t.s’
red transition absent in example code-> door can slam into your face!
tmre t
clk
in2305-II: L1 13
How to Program?
VHDL: FSM in entity door_controllerpros:
separate hardware: no problems sharing a processor with other tasks (scheduling, priorities)
fast and synchronous programming model: high frequency clocked process with simple polling for s and t
cons: VHDL to cumbersome / prohibitive for large
applications lots of legacy code written in, e.g., C
in2305-II: L1 14
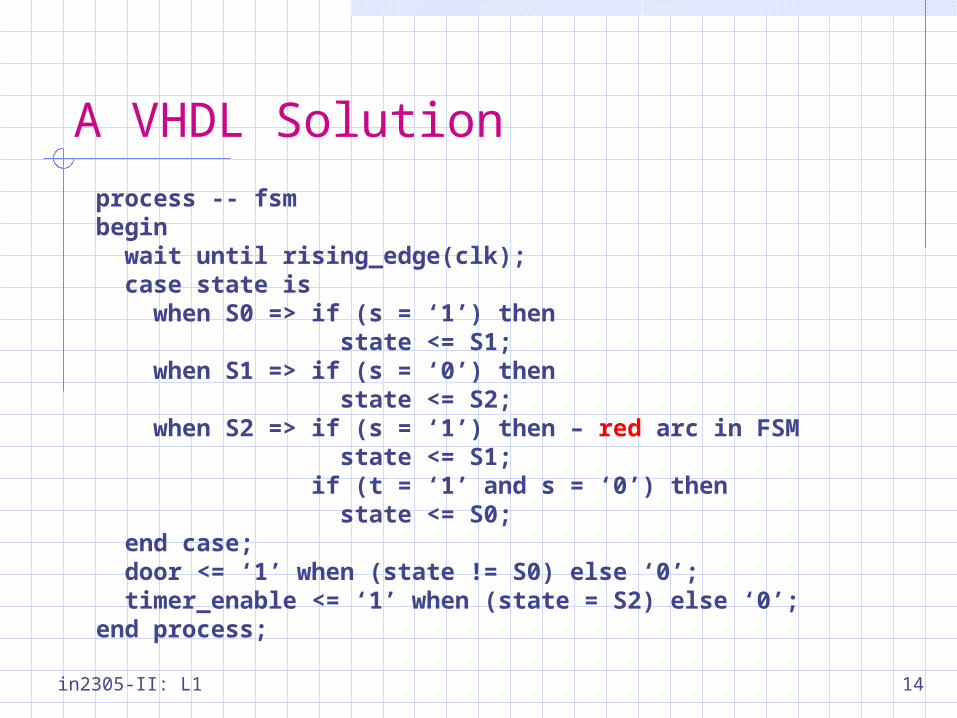
A VHDL Solutionprocess -- fsmbegin wait until rising_edge(clk); case state is when S0 => if (s = ‘1’) then state <= S1; when S1 => if (s = ‘0’) then state <= S2; when S2 => if (s = ‘1’) then – red arc in FSM state <= S1; if (t = ‘1’ and s = ‘0’) then state <= S0; end case; door <= ‘1’ when (state != S0) else ‘0’; timer_enable <= ‘1’ when (state = S2) else ‘0’;end process;
in2305-II: L1 15
What if C?
C: FSM in a task door_controllerpros:
simple (sequential) programming model
cons: can’t be invoked periodically by a high-frequency clock
(timer) because of polling overhead busy waiting (polling) is not an option (see above) ->
concurrent (event) programming (e.g., using interrupts and semaphores)
so the while loops in the example code are wrongonly use a delay which is not based on busy waitergo: interrupt programming, using an RTOS
in2305-II: L1 16
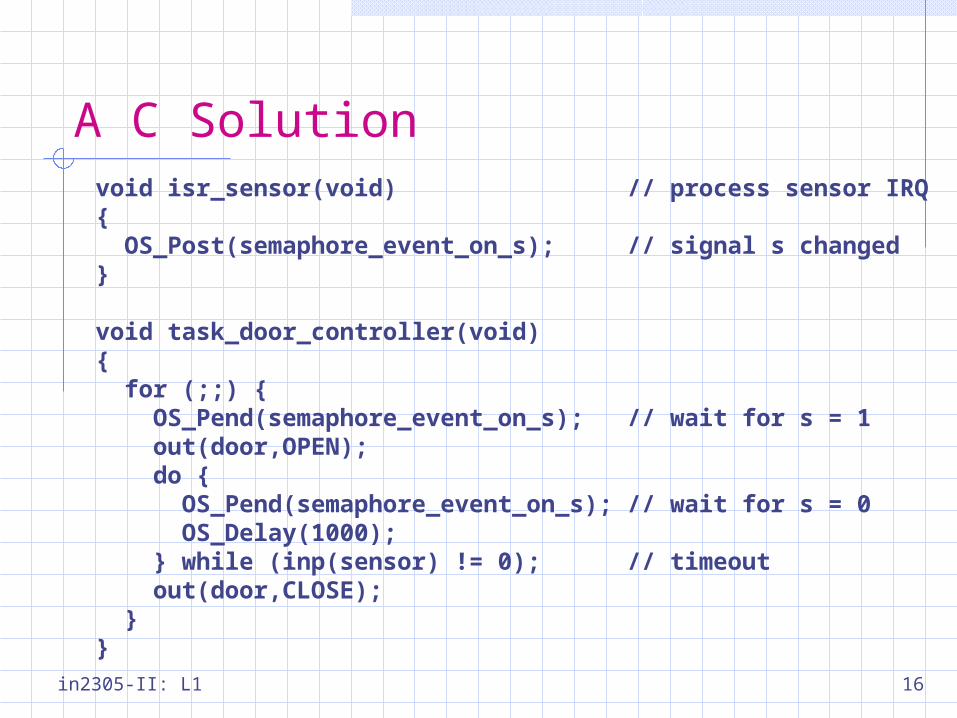
A C Solutionvoid isr_sensor(void) // process sensor IRQ{ OS_Post(semaphore_event_on_s); // signal s changed}
void task_door_controller(void) { for (;;) { OS_Pend(semaphore_event_on_s); // wait for s = 1 out(door,OPEN); do { OS_Pend(semaphore_event_on_s); // wait for s = 0 OS_Delay(1000); } while (inp(sensor) != 0); // timeout out(door,CLOSE); }}
in2305-II: L1 17
Issues
efficient, no busy waiting any more (OS_Pend, OS_Delay)still, code is not correct: interrupts (entering/leaving persons within delay period are not properly handled, and are only accumulated in semaphore (wrong)cannot afford to just “sit” in a delay, need control flow flexibility of a “real” FSM, i.e., to jump, AND ..the ability to simultaneously wait for two events (s or t):
void isr_sensor_and_timer(void) { // handle both IRQs OS_Post(s_or_t); // either s or t changed}

in2305-II: L1 18
Alternative C Solutionvoid task_door_controller(void) { for (;;) { switch (state) { STDBY: OS_Pend(s_or_t); // wait for 0-1 out(door,OPEN); state = OPEN; OPEN: OS_Pend(s_or_t); // wait for 1-0 timer_enable(); state = TIMING; TIMING: OS_Pend(s_or_t); // wait for 0-1 or t if (inp(sensor) == 0) { // timeout out(door,CLOSE); timer_disable(); state = STDBY; } else state = OPEN;}}}

in2305-II: L1 19
ConclusionEmbedded programming is not so easyNor in C nor VHDLC:
Concurrency needed (seq. prog. model): RTOS support Event programming needed: interrupts + RTOS support
Learn the basics of interrupt programming and using an RTOS (in C)Learning is (lots of) programming!Lab: simple Cruise Control subsystemHardware: FPGA board with 32 bit soft core + C tools
In2305 via: http://www.st.ewi.tudelft.nl/~gemund/
in2305-II: L1 20
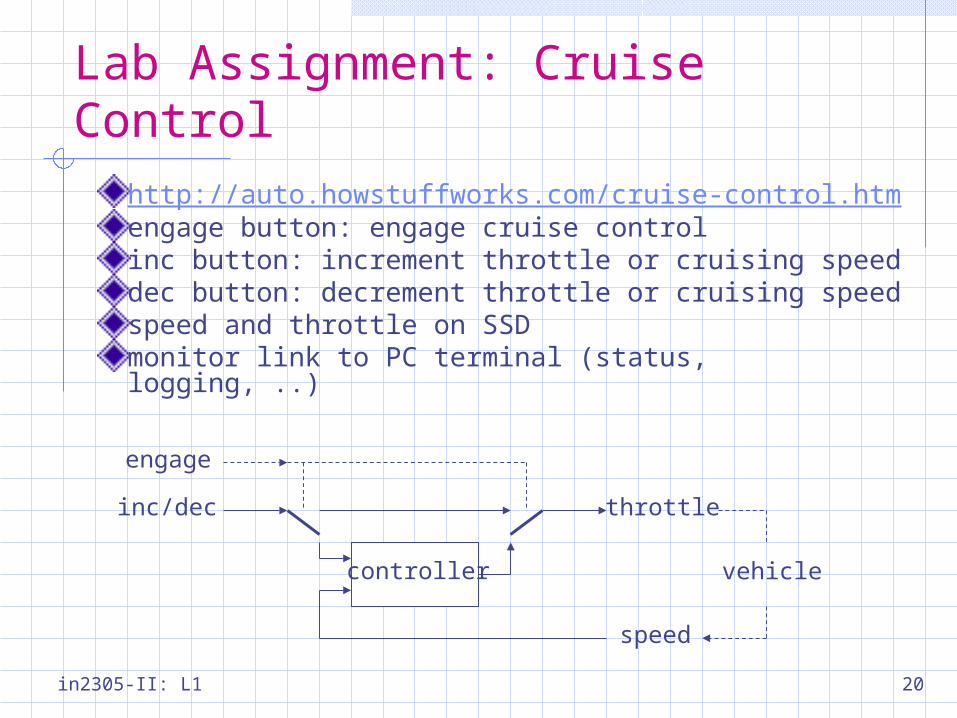
Lab Assignment: Cruise Controlhttp://auto.howstuffworks.com/cruise-control.htmengage button: engage cruise controlinc button: increment throttle or cruising speeddec button: decrement throttle or cruising speedspeed and throttle on SSDmonitor link to PC terminal (status, logging, ..)
throttle
speed
vehiclecontroller
inc/dec
engage

in2305-II: L1 21
Cruise Control Setup
m
(speed)
(vehicle)
Embed. Syst.
(FPGA board)
ab
(throttle)
PC host(Linux)
encoder
DC motor
in2305-II: L1 22
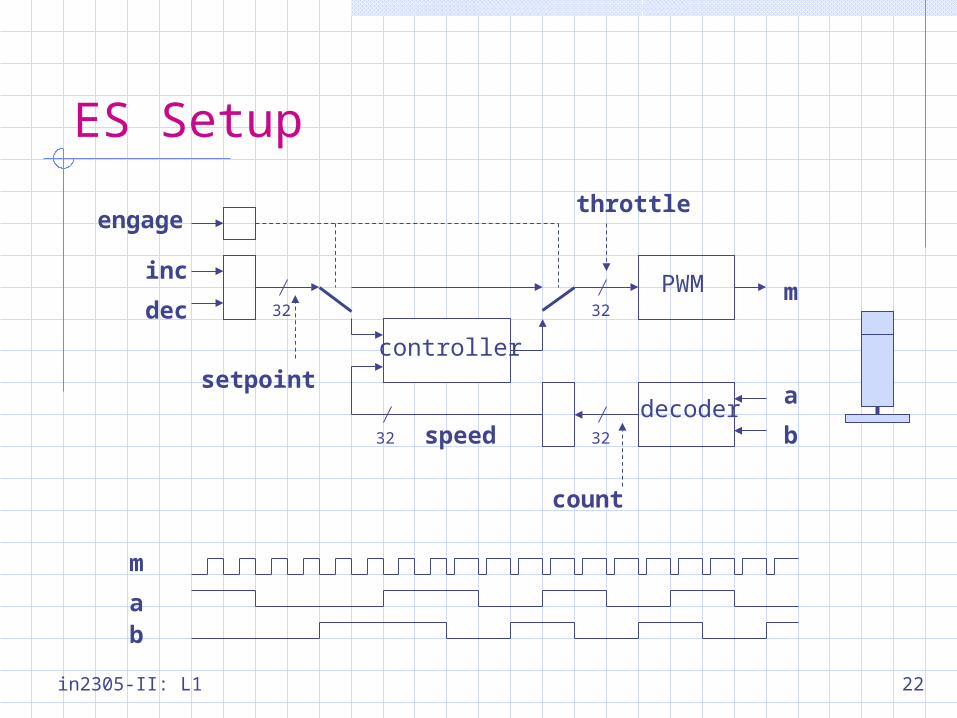
ES Setup
controller
inc
engage
dec 32
32
PWM
decoder
m
a
b
setpoint
speed
count
throttle
32
32
m
ab

in2305-II: L1 23
Demo
Demo ..
in2305-II: L1 24
Finally ..
Grade = f (MC exam, Quiz, Lab)Without lab NO gradeLab: presence mandatory, AWOL -> no grade!Lab enrollment: email TA ASAP
In2305-ii first time edition! Accept glitches ..Response group (3 student volunteers – via email)
In2305 via: http://www.st.ewi.tudelft.nl/~gemund/
Credits: Mark Dufour, Sijmen Woutersen
Related Documents











