G. Casalino, E. Zereik , E. Simetti, A. Turetta, S. Torelli and A. Sperindè EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, St. Petersburg, Russia Russia

G. Casalino, E. Zereik , E. Simetti, A. Turetta, S. Torelli and A. Sperindè
Dec 31, 2015
Planetary Rover Navigation via Visual Odometry : Performance Improvement Using Additional Image Processing and Multi-sensor Integration. G. Casalino, E. Zereik , E. Simetti, A. Turetta, S. Torelli and A. Sperindè. EUCASS 2011 – 4-8 July , St. Petersburg, Russia. Agenda. Introduction - PowerPoint PPT Presentation
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

G. Casalino, E. Zereik, E. Simetti, A. Turetta, S. Torelli and A. Sperindè
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

• Introduction• Visual Odometry• Additional Measurements• State Estimators• Sequence Estimators• Multi-Sensor Integration• Discussion and Conclusion
AgendaAgenda
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
• Planetary Robot• accurate localization and motion estimation
• Different techniques• WO• IMU• VO
• Improve VO• additional image processing• Extended/Iterated Kalman Filters• Sequence Estimators
• Integration scheme
• Final multi-sensor scheme
IntroductionIntroduction
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

Visual OdometryVisual Odometry
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

Visual OdometryVisual Odometry
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

Visual OdometryVisual Odometry
• At each step , the rover positionposition and orientationorientation are computed with respect to the previous step
• Sequence of positions-orientations truly attained by the vehicle
i 1i
ii r1 i
i 1
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
iii
ii
ii
ii
ii
i Nrr 111111 ,0,;ˆ
iii
ii
ii
ii
ii
i N 111111 ,0,;ˆ
ii
ii r ̂,ˆ 11 measured rover position and
orientation
ii
ii 11 , independent white noise sequences
affecting position and orientation measurements
ii
ii 11 , position and orientation covariance
matrices
EstimationsEstimations

EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
• At each step, VO provides the rover relativerelative position and orientation
• Absolute Absolute rover position and orientation:
where
Ti i1
ii
i TTTT ˆˆˆˆ 12
11
00
iii
iii
ii
ii RR
rRT ̂ˆ;
10
ˆˆˆ 11
111
EstimationsEstimations
• Linear open chain open chain of frames, with independentindependent positioning
• ErrorError progressively increasingincreasing with the number of stages
• No further constraints
• Improvements:
• Additional measurements• At each step provide measurements of the occurred motion between frames and
ii
ii r ̂,ˆ 22
i 2i
EstimationsEstimations
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

ii
ii
ii
ii rRrr 1
12
122
ii
ii
ii 1
122
• Assumption:
stereo camera can recognize in the current frame a sufficient number of features belonging to images and
1i 2i
Additional MeasurementsAdditional Measurements
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

ii
ii
ii
ii
ii
ii
11
23
12
12
1
0
1ˆ0
1
01
00
ii
ii
ii
ii
ii
ii
21
2
11
2
21
2
11
10ˆ
ˆ
ii
ii
ii
ii
ii
ii I
rI
r
r
Ir
r11
23
12
12
1
0ˆ
00
00
ii
ii
iii
i
ii
ii
ii
r
r
Rr
r
21
2
11
2
122
12
1
10
ˆ
ˆ
orientationorientation
positionposition
State Space ModelState Space Model
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

State Space ModelState Space Model
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

• System evolution estimated via standard Kalman filters• Extended Extended (EKF)• Iterated Iterated (IKF)
• GaussianityGaussianity hypothesis for the filter
• Gaussianity is not suitable due to system non-linearity• such an approximation leads to suboptimalitysuboptimality
• These are recursiverecursive filters• linearly increasing errors have still to be expected for increasing number of stages
• Incoming acquisitions to better all the past state estimations
State EstimatorsState Estimators
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

ikrr
ik
kki
kki
,2,1;
,2,1;1,1
1,1
iii rX ,1,1,1 ;
ikrrw
ikz
kk
kki
kk
kki
,2,1;ˆ,ˆ
,2,1;ˆ,ˆ
21,1
21,1
iii wzZ ,1,1,1 ;
ii
X
iii ZXprXi
,1,1,1,1,1 /maxarg;,1
• The problem becomes:
measurememeasurementnt sequencesequence
state state sequencesequence
Sequence EstimatorsSequence Estimators
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

• Renew, at each stage, the entire sequence , without relying on the previous one
• Error generally characterizing IKF and EKF should result strongly reducedstrongly reduced
BUTBUT
• Increasing dimensionalitydimensionality with increasing number of stages
• linearlinear and quite acceptable with a reasonably high maximum number of stages
• after this freezefreeze and restartrestart the procedure
iX ,1
1,1 iX
Sequence EstimatorsSequence Estimators
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

iii
r
iiii wrprzpii
,1,1,1,1,1,1,1 ,/maxarg/maxarg,1,1
• Solve the following cascade of sub-problemssub-problems:
• Maintain a manageablemanageable implementative form that otherwise cannot be guaranteed, considering the general problem
• Minimization of the Gaussian p.d.f. exponents
• BayesBayes formula
Sequence EstimatorsSequence Estimators
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

• At each stage a linear parametrizationlinear parametrization is obtained
• It is the constraint for the previous stage
• Back Substitution Back Substitution scheme
• Dynamic ProgrammingDynamic Programming strategy
Sequence EstimatorsSequence Estimators
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

ii r ,1,1 ;
• Wait until stage
• RenewRenew the interpolated sequence in correspondence of eacheach new stage
• Backward PhaseBackward Phase: computational effort increasing with the number of stages
• RestartRestart the procedure from the last stage considered as the new initial one
• SmallerSmaller drifting errors
• Accepted suboptimalitysuboptimality vs. joint estimation of both sequences
i
CommentsComments
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
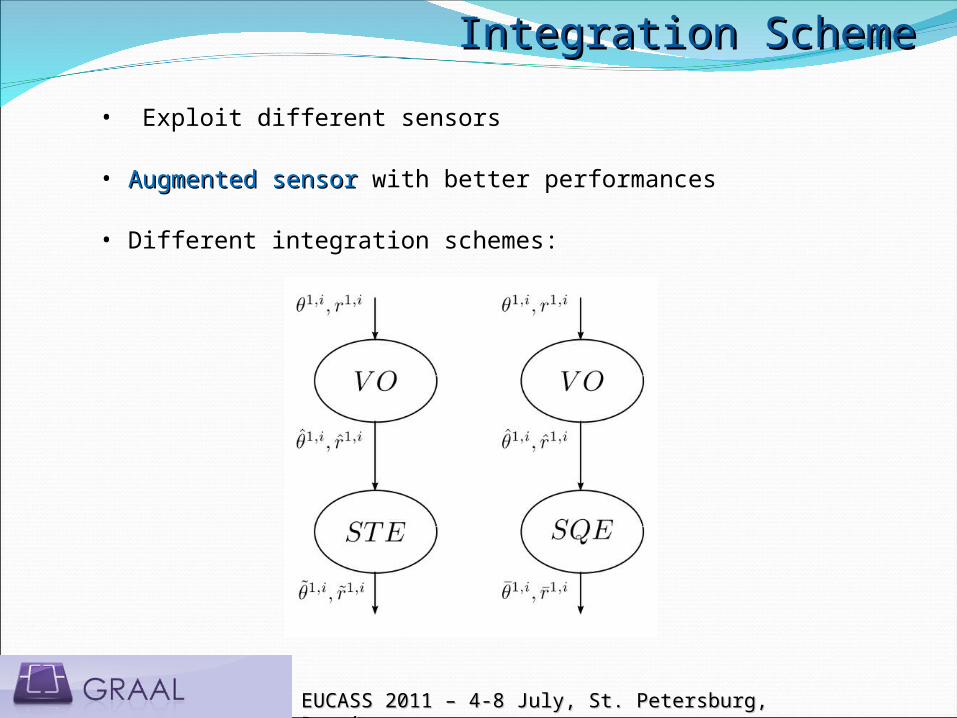
• Exploit different sensors
• Augmented sensorAugmented sensor with better performances
• Different integration schemes:
Integration SchemeIntegration Scheme
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
• First sequentialsequential scheme
• SQE fed with smaller variance smaller variance measurements data from STE
• Feedback loop used to re-initialize the STE module
• Totally useless Totally useless scheme
Integration SchemeIntegration Scheme

• Without further data, things can be bettered with a parallelparallel integration scheme
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
Integration SchemeIntegration Scheme

• IMUIMU: measurements about the angular velocity vector and the linear acceleration vector
• WOWO integration
v
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
Multi-Sensor IntegrationMulti-Sensor Integration

• Previously developed VO module
• via softwarevia software
• CUDA implementation:
• SURF extraction and descriptors via CUDAvia CUDA• matching and tracking via software with SAD• pose estimation via software
• Sequence Estimator
• Sensor data integration
ms10ms60ms50
ms120
ms1000500
Discussion and ConclusionDiscussion and Conclusion
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

• Open issues:
• still under considerationunder consideration• many simulations and experimental tests are to be carried out• not only planar motion• mange the non-holonomic constraints for the rover
• “Visual Odometry Centric” scheme
• different state space model starting from a different sensor• integration scheme with possibly different characteristics• worth a comparison
Discussion and ConclusionDiscussion and Conclusion
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia

Questions?Questions?
Thank you!Thank you!
EUCASS 2011 – 4-8 July, EUCASS 2011 – 4-8 July, St. Petersburg, RussiaSt. Petersburg, Russia
Related Documents











