Seminar Report on Digital Image Processing Submitted by Trishna Pattanaik < Regd. No.: 1301229183 > Project Report submitted in partial fulfillment of the requirements for the award of the degree of B.Tech. in Computer Science & Engineering under Biju Pattnaik University of Technology (BPUT) 2016-2017 Under the Guidance of Surajit Mohanty HOD Dept. of CSE Department of Computer Science & Engineering DRIEMS Tangi, Cuttack-745022

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Seminar Report on
Digital Image Processing
Submitted by
Trishna Pattanaik
< Regd. No.: 1301229183 >
Project Report submitted in partial fulfillment of the
requirements for the award of the degree of
B.Tech. in Computer Science & Engineering under
Biju Pattnaik University of Technology (BPUT)
2016-2017
Under the Guidance of
Surajit Mohanty
HOD Dept. of CSE
Department of Computer Science & Engineering
DRIEMS Tangi, Cuttack-745022
CERTIFICATE
This is to certify that the project Digital Image Processing presented
by Trishna Pattanaik bearing Registration No. 1301229183 of
Department of Computer Science and Engineering in DRIEMS,
Cuttack has been completed successfully.
This is in partial fulfillment of the requirements of Bachelor Degree in
Computer Science and Engineering under Biju Pattnaik University of
Technology, Rourkela, Orissa.
I wish her success in all future endeavors.
Prof. Surajit Mohanty Prof. Surajit Mohanty Head of the Department Guide Computer Science & Engineering Computer Science & Engineering
Date: 19th March 2016 Date: 19th March 2016
ACKNOWLEDGEMENT
I express my sincere gratitude to Prof. Surajit Mohanty of Computer
Science and Engineering for giving me an opportunity to accomplish
seminar on the project. Without his active support and guidance, this
seminar would not have been successfully completed.
Trishna Pattanaik
Department of Computer Science & Engineering Regd.No.- 1301229183

Digital Image Processing
ABSTRACT
Digital image processing (dip) methods stems for two principal application areas: improvement of pictorial information for human interpretation and processing of image data for storage, transmission and representation for autonomous machine perception. Thus, the objectives of the topic are: to define the scope of the field, to give a historical perspective of the origins of this field, to give the idea of the state of the art in dip by examining some of the principal areas in which it is applied, to discuss briefly the principal approaches used in dip and to give an overview of the components contained in a typical general-purpose image processing system. Signature of the Guide Signature of the Student
Name : Prof. Surajit Mohanty Name : Trishna Pattanaik
Date : 19th March 2016 Regn. No : 1301229183
Semester : 6th
Branch : CSE
Section : C
Date : 19th March 2016
TABLE OF CONTENTS
CHAPTER NO. TITLE PAGE NO.
CERTIFICATE i
ACKNOWLEDGEMENT ii
ABSTRACT iii
LIST OF FIGURES v
1. INTRODUCTION 1
1.1 What is digital image processing? 1
1.2 The origins of Digital Image Processing 1
1.3 Fundamental steps for Digital Image Processing 2
2. DIGITAL IMAGE FUNDAMENTALS 4
2.1 Image Acquisition 4
2.2 Image Enhancement 5
2.3 Image Restoration 6
3. COLOR IMAGE PROCESSING 13
5.1 Pseudocolor Image Processing 13
5.2 Full-color Image Processing 13
4. MULTIRESOLUTION & MORPHOLOGICAL 14
IMAGE PROCESSING
4.1 Wavelets & Multiresolution Processing 14
4.2 Morphological Image Processing 15
5. IMAGE SEGMENTATION 16
6. COMPRESSION & REPRESENTATION 17
6.1 Image Compression 17
6.2 Representation & Description 18
6.3 Object Recognition 20
7. FIELDS OF APPLICATION 21
CONCLUSION 23
REFERENCES 24
LIST OF FIGURES
Figure1.1: A digital picture produced in 1921 from a coded tape by a telegraph printer with
special type faces.
Figure 1.2: A digital picture made in 1922 from a tape punched after the signals had crossed
the Atlantic twice.
Figure1.3: The first picture of the moon by a U.S. spacecraft Ranger 7 took this image on
July 31, 1964 at 9:09 A.M. EDT about 17 minutes before impacting the lunar surface.
Figure 1.4: Fundamental steps in digital image processing.
Figure 2.1: Single Imaging Sensor
Figure 2.2: Combining a single sensor with motion to generate a 2-D image.
Figure 2.3: Line Sensor
Figure 2.4: (a) Image acquisition using a linear sensor strip.
(b) Image acquisition using a circular sensor strip.
Figure 2.5: Array Sensor
Figure 2.6: An example of the digital image acquisition process.
Figure 2.7: Some basic gray-level transformation functions used for image enhancement.
Figure 2.8: Comparing lowpass filters.
Figure 2.9: Comparing highpass filters.
Figure 2.10: Noise Examples.
Figure 2.11: Noise removal examples.
Figure 3.1: Result of density slicing into 8 colors on an image of Picker Thyroid Phantom.
Figure 3.2: Pseudocolor enhancement by using the gray level to color transformation.
Figure 3.3: A full-color image and its various color space components.
Figure 4.1: A pyramidal image structure.
Figure 4.2: Erosion to remove image components.
Figure 4.3: Dilation of sample text.
Figure 6.1: Computer Generated 256 X 256 X 8 bit images with (a) coding redundancy
(b) spatial redundancy (c) irrelevant information.
Figure 7.1: Images of the Crab Pulsar (in the centre of images) covering the EM spectrum.
Figure 7.2: A Fractal Image.
v

CHAPTER 1
INTRODUCTION
1.1 WHAT IS DIGITAL IMAGE PROCESSING?
An image may be defined as a two-dimensional function f(x, y), where x and y are spatial
(plane) coordinates and the amplitude of f at any pair of coordinates (x, y) is called the intensity
or gray level of the image at that point. When x, y and the amplitude values of f are all finite,
discrete quantities, we call the image a digital image. The field of digital image processing
refers to processing digital images by means of a digital computer. Note that a digital image is
composed of a finite number of elements, each of which has a particular location and value.
These elements are referred to as picture elements, image elements, pels, and pixels.
Digital image processing encompasses processes whose inputs and outputs are images and
in addition, encompasses processes that extract attributes from images up to and including the
recognition of individual objects. The processes of acquiring an image of the area containing
the text, preprocessing that image, extracting (segmenting) the individual characters,
describing the characters in a form suitable for computer processing, and recognizing those
individual characters are in the scope of what we call digital image processing [2].
1.2 THE ORIGINS OF DIGITAL IMAGE PROCESSING
One of the first applications of digital images was in the newspaper industry, when pictures
were first sent by submarine cable between London and New York. Introduction of the Bartlane
cable picture transmission system in the early 1920s reduced the time required to transport a
picture across the Atlantic from more than a week to less than three hours. The printing method
used to obtain figure 1.1 was abandoned toward the end of 1921 in favor of a technique based
on photographic reproduction made from tapes perforated at the telegraph receiving terminal.
Figure1.1: A digital picture produced in 1921 from a coded
tape by a telegraph printer with special type faces.
1
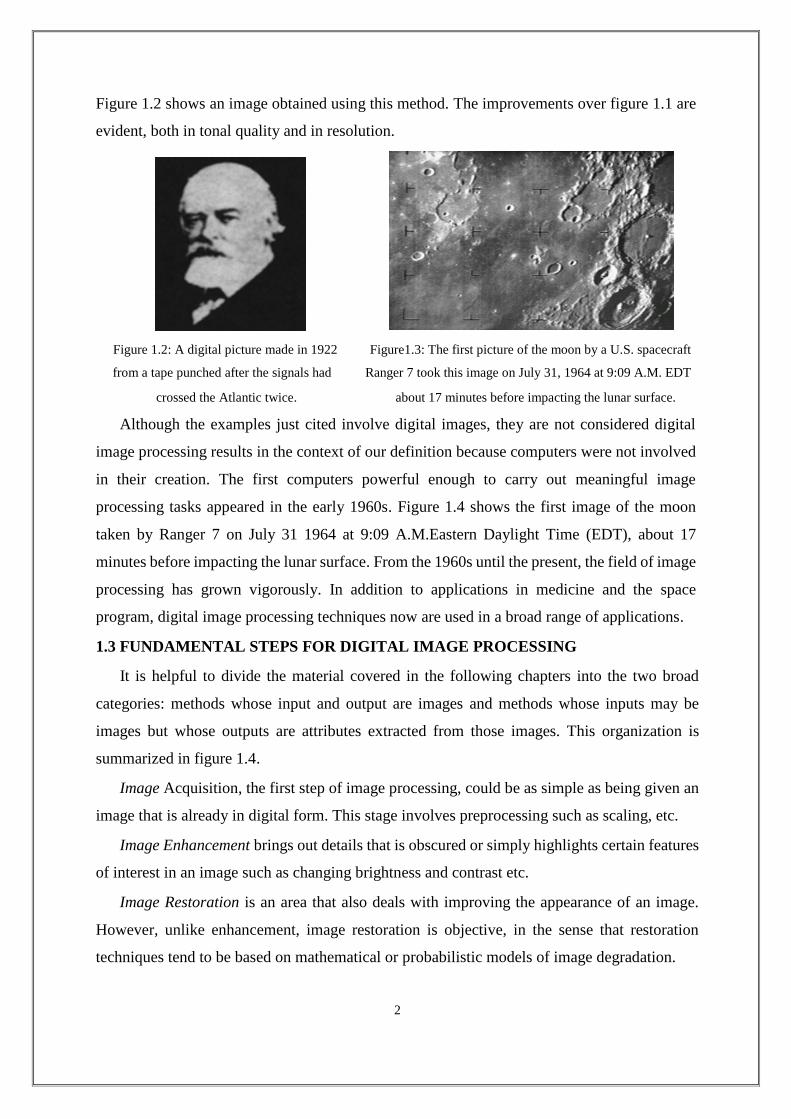
Figure 1.2 shows an image obtained using this method. The improvements over figure 1.1 are
evident, both in tonal quality and in resolution.
Figure 1.2: A digital picture made in 1922 Figure1.3: The first picture of the moon by a U.S. spacecraft
from a tape punched after the signals had Ranger 7 took this image on July 31, 1964 at 9:09 A.M. EDT
crossed the Atlantic twice. about 17 minutes before impacting the lunar surface.
Although the examples just cited involve digital images, they are not considered digital
image processing results in the context of our definition because computers were not involved
in their creation. The first computers powerful enough to carry out meaningful image
processing tasks appeared in the early 1960s. Figure 1.4 shows the first image of the moon
taken by Ranger 7 on July 31 1964 at 9:09 A.M.Eastern Daylight Time (EDT), about 17
minutes before impacting the lunar surface. From the 1960s until the present, the field of image
processing has grown vigorously. In addition to applications in medicine and the space
program, digital image processing techniques now are used in a broad range of applications.
1.3 FUNDAMENTAL STEPS FOR DIGITAL IMAGE PROCESSING
It is helpful to divide the material covered in the following chapters into the two broad
categories: methods whose input and output are images and methods whose inputs may be
images but whose outputs are attributes extracted from those images. This organization is
summarized in figure 1.4.
Image Acquisition, the first step of image processing, could be as simple as being given an
image that is already in digital form. This stage involves preprocessing such as scaling, etc.
Image Enhancement brings out details that is obscured or simply highlights certain features
of interest in an image such as changing brightness and contrast etc.
Image Restoration is an area that also deals with improving the appearance of an image.
However, unlike enhancement, image restoration is objective, in the sense that restoration
techniques tend to be based on mathematical or probabilistic models of image degradation.
2
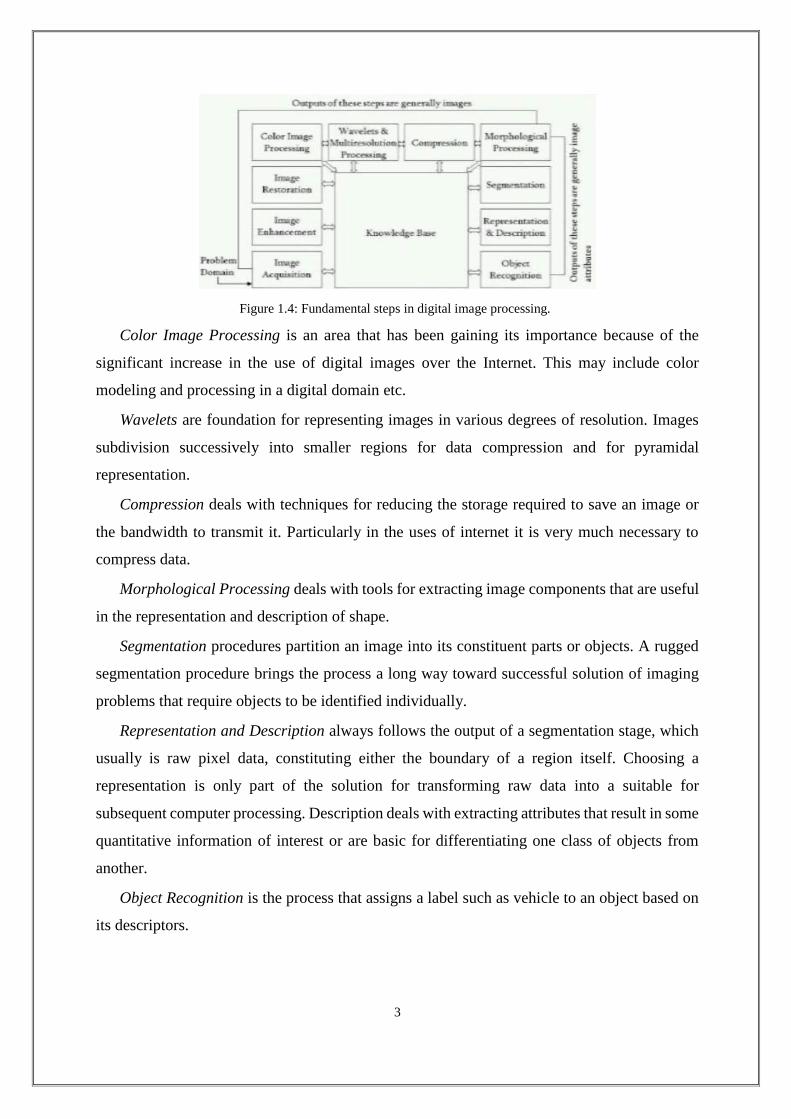
Figure 1.4: Fundamental steps in digital image processing.
Color Image Processing is an area that has been gaining its importance because of the
significant increase in the use of digital images over the Internet. This may include color
modeling and processing in a digital domain etc.
Wavelets are foundation for representing images in various degrees of resolution. Images
subdivision successively into smaller regions for data compression and for pyramidal
representation.
Compression deals with techniques for reducing the storage required to save an image or
the bandwidth to transmit it. Particularly in the uses of internet it is very much necessary to
compress data.
Morphological Processing deals with tools for extracting image components that are useful
in the representation and description of shape.
Segmentation procedures partition an image into its constituent parts or objects. A rugged
segmentation procedure brings the process a long way toward successful solution of imaging
problems that require objects to be identified individually.
Representation and Description always follows the output of a segmentation stage, which
usually is raw pixel data, constituting either the boundary of a region itself. Choosing a
representation is only part of the solution for transforming raw data into a suitable for
subsequent computer processing. Description deals with extracting attributes that result in some
quantitative information of interest or are basic for differentiating one class of objects from
another.
Object Recognition is the process that assigns a label such as vehicle to an object based on
its descriptors.
3
CHAPTER 2
DIGITAL IMAGE FUNDAMENTALS
2.1 IMAGE ACQUISITION
The types of images in which we are interested are generated by the combination of an
“illumination” source and the reflection or absorption of energy from that source by the
elements of the “scene” being imaged. Thus, three principal sensor arrangements used to
transform illumination energy into digital images: single imaging sensor, line sensor or sensor
strips and array sensor [3].
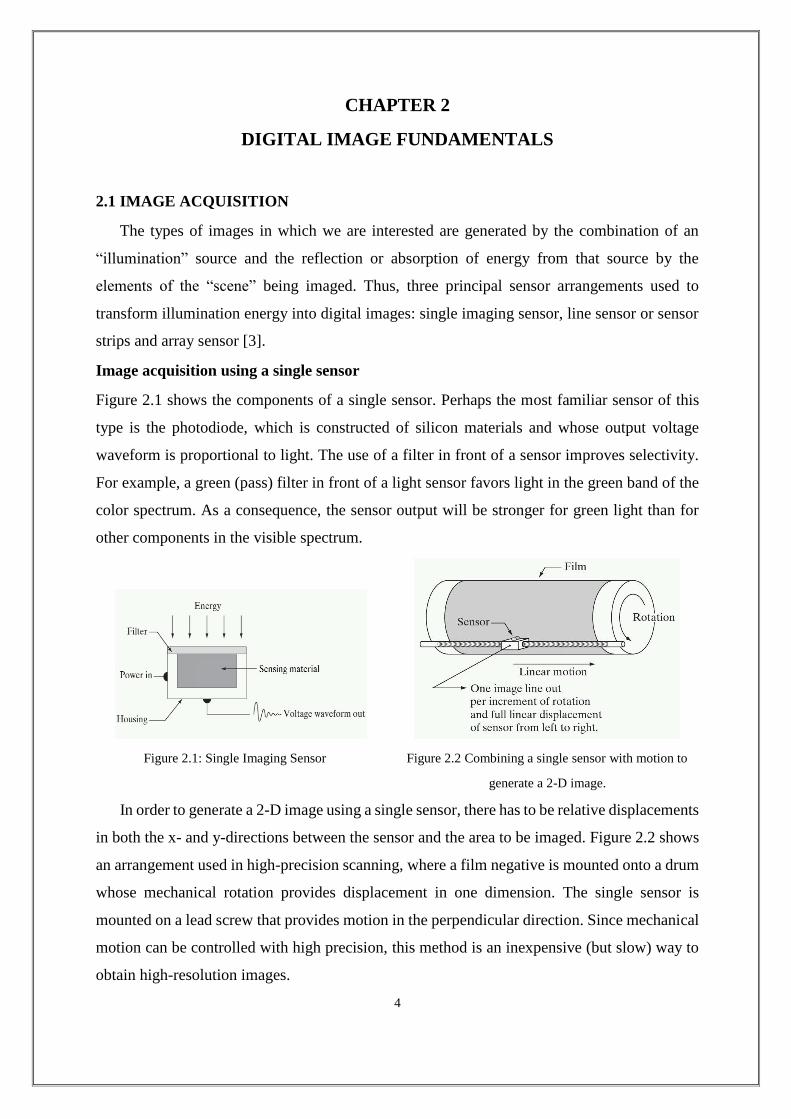
Image acquisition using a single sensor
Figure 2.1 shows the components of a single sensor. Perhaps the most familiar sensor of this
type is the photodiode, which is constructed of silicon materials and whose output voltage
waveform is proportional to light. The use of a filter in front of a sensor improves selectivity.
For example, a green (pass) filter in front of a light sensor favors light in the green band of the
color spectrum. As a consequence, the sensor output will be stronger for green light than for
other components in the visible spectrum.
Figure 2.1: Single Imaging Sensor Figure 2.2 Combining a single sensor with motion to
generate a 2-D image.
In order to generate a 2-D image using a single sensor, there has to be relative displacements
in both the x- and y-directions between the sensor and the area to be imaged. Figure 2.2 shows
an arrangement used in high-precision scanning, where a film negative is mounted onto a drum
whose mechanical rotation provides displacement in one dimension. The single sensor is
mounted on a lead screw that provides motion in the perpendicular direction. Since mechanical
motion can be controlled with high precision, this method is an inexpensive (but slow) way to
obtain high-resolution images.
4
Image acquisition using sensor strips
A geometry that is used much more frequently than single sensors consists of an in-line
arrangement of sensors in the form of a sensor strip, as figure 2.3 shows. The strip provides
imaging elements in one direction. Motion perpendicular to the strip provides imaging in the
other direction, as shown in figure 2.4(a). This is the type of arrangement used in most flatbed
scanners. Sensing devices with 4000 or more in-line sensors are possible.
Figure 2.3: Line Sensor
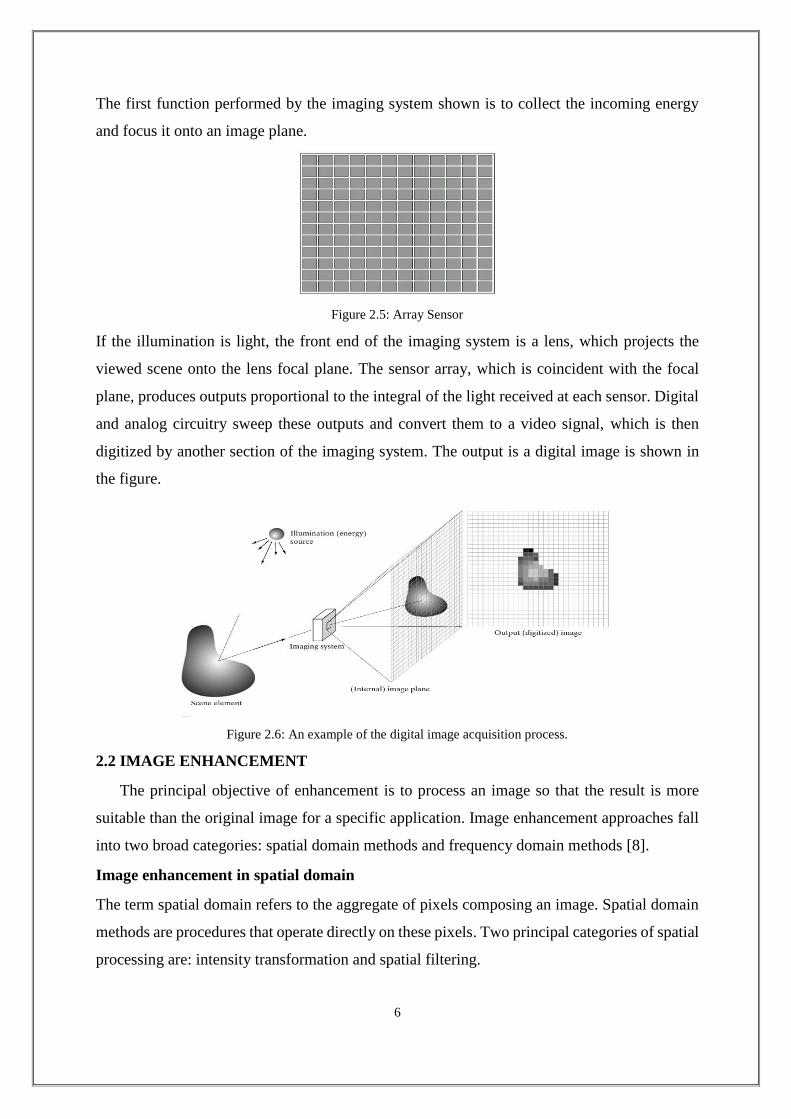
In-line sensors are used routinely in airborne imaging applications, in which the imaging
system is mounted on an aircraft that flies at a constant altitude and speed over the geographical
area to be imaged. Sensor strips mounted in a ring configuration are used in medical and
industrial imaging to obtain cross-sectional images of 3-D objects, as figure 2.4(b) shows. A
rotating X-ray source provides illumination and the portion of the sensors opposite the source
collect the X-ray energy that pass through the object (the sensors obviously have to be sensitive
to X-ray energy).This is the basis for medical and industrial computerized axial tomography
(CAT) imaging.
Figure 2.4: (a) Image acquisition using a linear sensor strip. (b) Image acquisition using a circular sensor strip.
Image acquisition using sensor arrays
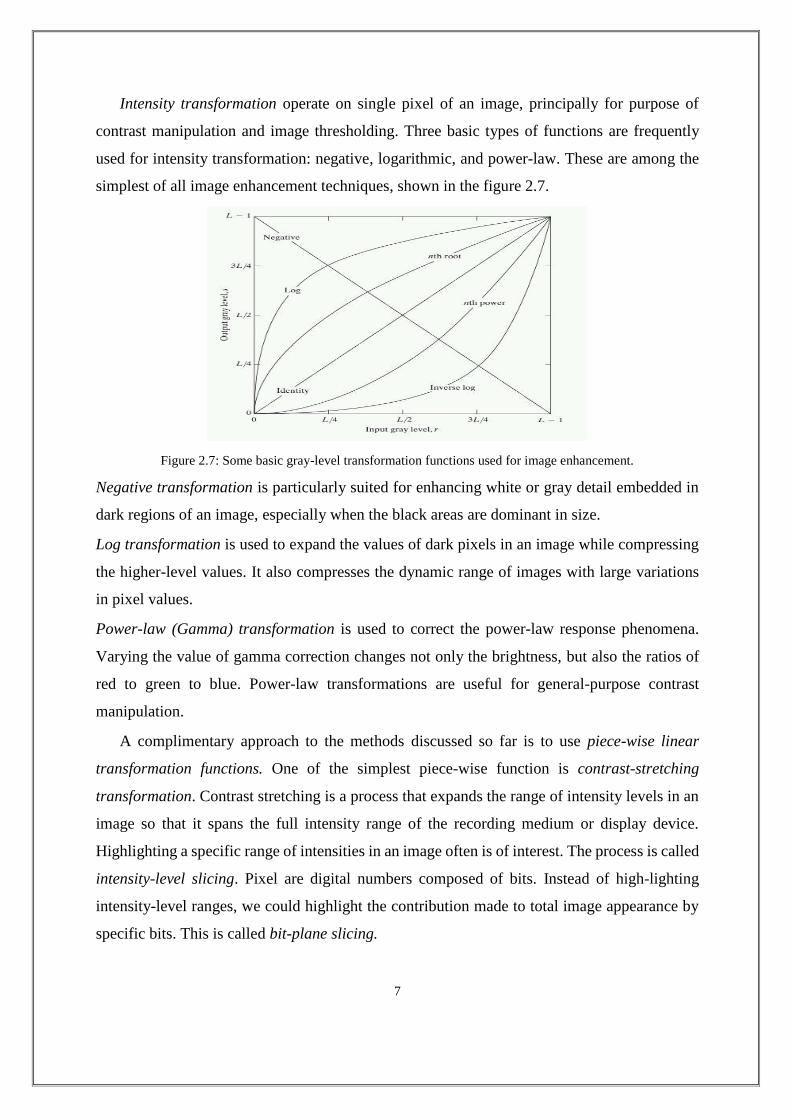
Figure 2.5 shows individual sensors arranged in the form of a 2-D array. Numerous
electromagnetic and some ultrasonic sensing devices frequently are arranged in an array format.
This is also the predominant arrangement found in digital cameras. The principal manner in
which array sensors are used is shown in figure 2.6. This figure shows the energy from an
illumination source being reflected from a scene element.
5
The first function performed by the imaging system shown is to collect the incoming energy
and focus it onto an image plane.
Figure 2.5: Array Sensor
If the illumination is light, the front end of the imaging system is a lens, which projects the
viewed scene onto the lens focal plane. The sensor array, which is coincident with the focal
plane, produces outputs proportional to the integral of the light received at each sensor. Digital
and analog circuitry sweep these outputs and convert them to a video signal, which is then
digitized by another section of the imaging system. The output is a digital image is shown in
the figure.
Figure 2.6: An example of the digital image acquisition process.
2.2 IMAGE ENHANCEMENT
The principal objective of enhancement is to process an image so that the result is more
suitable than the original image for a specific application. Image enhancement approaches fall
into two broad categories: spatial domain methods and frequency domain methods [8].
Image enhancement in spatial domain
The term spatial domain refers to the aggregate of pixels composing an image. Spatial domain
methods are procedures that operate directly on these pixels. Two principal categories of spatial
processing are: intensity transformation and spatial filtering.
6
Intensity transformation operate on single pixel of an image, principally for purpose of
contrast manipulation and image thresholding. Three basic types of functions are frequently
used for intensity transformation: negative, logarithmic, and power-law. These are among the
simplest of all image enhancement techniques, shown in the figure 2.7.
Figure 2.7: Some basic gray-level transformation functions used for image enhancement.
Negative transformation is particularly suited for enhancing white or gray detail embedded in
dark regions of an image, especially when the black areas are dominant in size.
Log transformation is used to expand the values of dark pixels in an image while compressing
the higher-level values. It also compresses the dynamic range of images with large variations
in pixel values.
Power-law (Gamma) transformation is used to correct the power-law response phenomena.
Varying the value of gamma correction changes not only the brightness, but also the ratios of
red to green to blue. Power-law transformations are useful for general-purpose contrast
manipulation.
A complimentary approach to the methods discussed so far is to use piece-wise linear
transformation functions. One of the simplest piece-wise function is contrast-stretching
transformation. Contrast stretching is a process that expands the range of intensity levels in an
image so that it spans the full intensity range of the recording medium or display device.
Highlighting a specific range of intensities in an image often is of interest. The process is called
intensity-level slicing. Pixel are digital numbers composed of bits. Instead of high-lighting
intensity-level ranges, we could highlight the contribution made to total image appearance by
specific bits. This is called bit-plane slicing.
7
Spatial filtering deals with performing operations such as image sharpening, by working in
the neighborhood of every pixel in an image. Filtering creates a new pixel with coordinates
equal to the coordinates of the center of the neighborhood, and whose value is the result of the
filtering operation. A processed (filtered) image is generated as the center of the filter visits
each pixel in the input image.
Smoothing filters are used for blurring and for noise reduction. Blurring is used in
preprocessing tasks, such as removal of small details from an image prior to object extraction
and bridging of small gaps in lines or curves. Noise reduction can be accomplished by bluring
with linear filter. The output of smoothing is simply the average of the pixels contained in the
neighborhood of the filter mask. These filters sometimes are called averaging filters.
The principal objective of sharpening filters is to highlight transitions in intensity. Uses of
image sharpening vary and include applications ranging from electronic printing and medical
imaging to industrial inspection and autonomous guidance in military systems.
Image enhancement in frequency domain
Filtering techniques in the frequency domain are based on modifying the Fourier transform
to achieve a specific objective and then computing the inverse DFT to get us back to the image
domain.
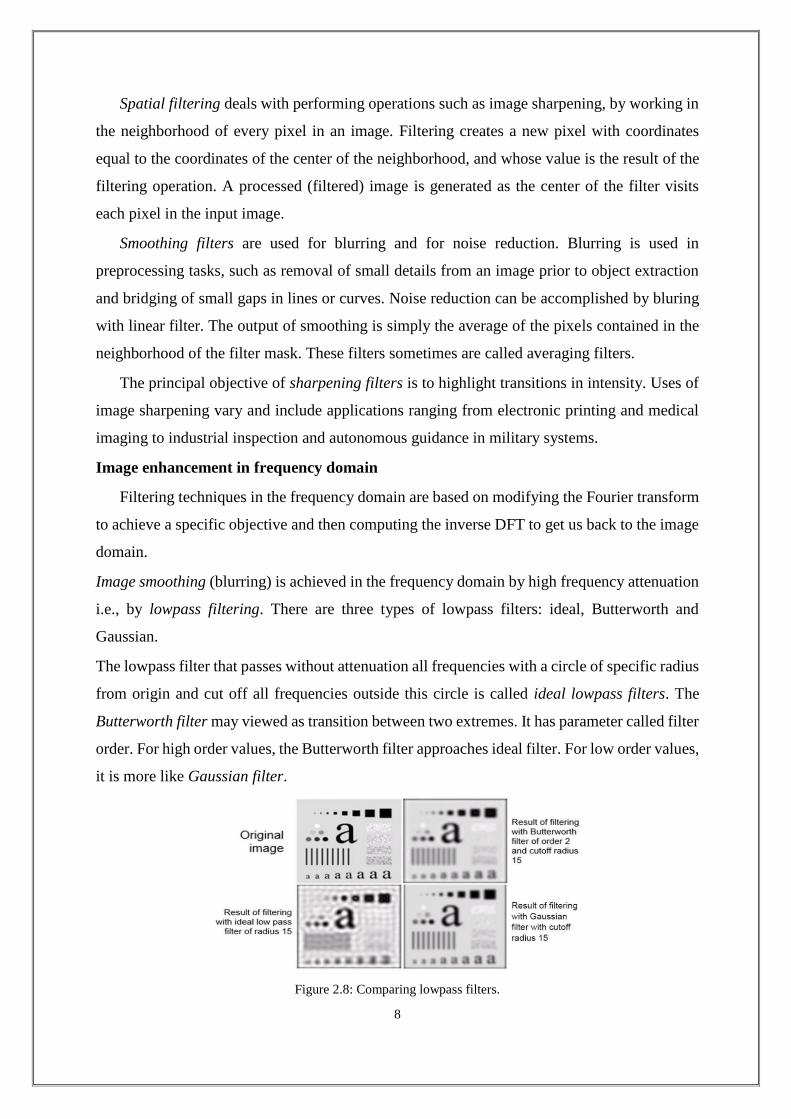
Image smoothing (blurring) is achieved in the frequency domain by high frequency attenuation
i.e., by lowpass filtering. There are three types of lowpass filters: ideal, Butterworth and
Gaussian.
The lowpass filter that passes without attenuation all frequencies with a circle of specific radius
from origin and cut off all frequencies outside this circle is called ideal lowpass filters. The
Butterworth filter may viewed as transition between two extremes. It has parameter called filter
order. For high order values, the Butterworth filter approaches ideal filter. For low order values,
it is more like Gaussian filter.
Figure 2.8: Comparing lowpass filters.
8

Image Sharpening
Image sharpening can be achieved in the frequency domain by highpass filtering, which
attenuates the low-frequency components without disturbing high-frequency information in the
Fourier transform. Here we consider ideal, Butterworth and Gaussian highpass filters.
Figure 2.9: Comparing highpass filters.
2.3 IMAGE RESTORATION
Restoration attempts to recover an image that has been degraded by using a prior knowledge
of degradation phenomenon. Thus, restoration techniques are oriented towards modeling the
degradation and applying the inverse process in order to recover the original image.
Degradation process is modeled as a degradation function that together with an additive noise
term, operates on an input image to produce degraded image. The objective of restoration is to
obtain an estimate of original image [5].
Noise models
The principal source of noise in digital images arise during image acquisition and/or
transmission. Based on the restoration assumption, we shall be concerned with the statistical
behavior of the intensity values in the noise component of the model. These may be considered
as random variable characterized by the following probability density functions: Gaussian,
Rayleigh, Erlang, Exponential, Uniform and Impulse (salt & pepper) noise, shown in figure 4.1.
Another type of noise is periodic noise which arises typically from electrical or
electromechanical interference during image acquisition. Periodic noise can be reduced
significantly via frequency domain filtering.
Filtering to remove noise
Spatial filtering is the method of choice in situations when only additive random noise is
present. Here, we discuss briefly the noise-reduction capabilities of the spatial filters.
9
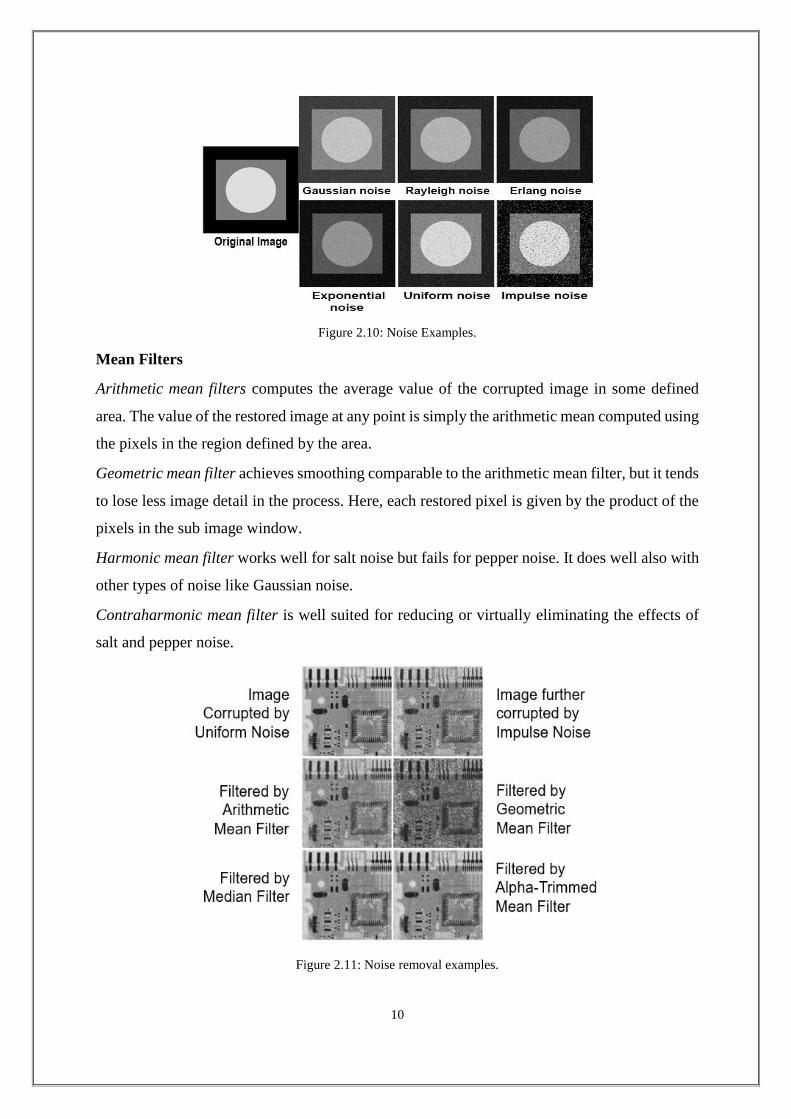
Figure 2.10: Noise Examples.
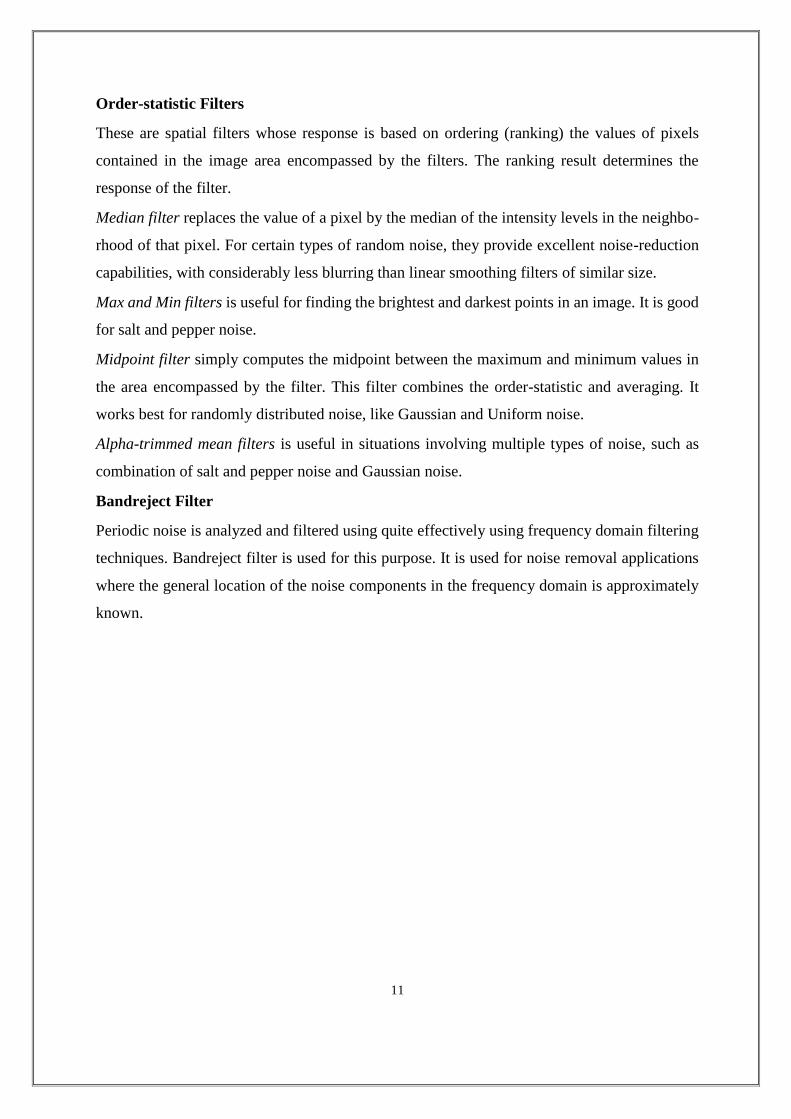
Mean Filters
Arithmetic mean filters computes the average value of the corrupted image in some defined
area. The value of the restored image at any point is simply the arithmetic mean computed using
the pixels in the region defined by the area.
Geometric mean filter achieves smoothing comparable to the arithmetic mean filter, but it tends
to lose less image detail in the process. Here, each restored pixel is given by the product of the
pixels in the sub image window.
Harmonic mean filter works well for salt noise but fails for pepper noise. It does well also with
other types of noise like Gaussian noise.
Contraharmonic mean filter is well suited for reducing or virtually eliminating the effects of
salt and pepper noise.
Figure 2.11: Noise removal examples.
10
Order-statistic Filters
These are spatial filters whose response is based on ordering (ranking) the values of pixels
contained in the image area encompassed by the filters. The ranking result determines the
response of the filter.
Median filter replaces the value of a pixel by the median of the intensity levels in the neighbo-
rhood of that pixel. For certain types of random noise, they provide excellent noise-reduction
capabilities, with considerably less blurring than linear smoothing filters of similar size.
Max and Min filters is useful for finding the brightest and darkest points in an image. It is good
for salt and pepper noise.
Midpoint filter simply computes the midpoint between the maximum and minimum values in
the area encompassed by the filter. This filter combines the order-statistic and averaging. It
works best for randomly distributed noise, like Gaussian and Uniform noise.
Alpha-trimmed mean filters is useful in situations involving multiple types of noise, such as
combination of salt and pepper noise and Gaussian noise.
Bandreject Filter
Periodic noise is analyzed and filtered using quite effectively using frequency domain filtering
techniques. Bandreject filter is used for this purpose. It is used for noise removal applications
where the general location of the noise components in the frequency domain is approximately
known.
11

CHAPTER 3
COLOR IMAGE PROCESSING
Color image processing is divided into two categories: full-color and pseudocolor image
processing. In the first category, the images in question are typically acquired with a full-color
sensor, such as a color TV camera or color scanner. In the second category, the problem is one
of assigning a color to a particular monochrome intensity or range of intensities [6].
3.1 PSEUDOCOLOR IMAGE PROCESSING
Pseudocolor image processing consists of assigning color to grey values based on a
specified criterion. The term pseudo or false color is used to differentiate the process of
assigning colors to monochrome images from the processes associated with true color images.
The principal use of pseudocolor is for human visualization and interpretation of grey-scale
events in an image or sequence of images.
Intensity Slicing
The technique of intensity (density) slicing is one of the simplest examples of pseudo color
image processing. If an image is interpreted as a 3-D function, the method can be viewed as
one of placing planes parallel to the coordinate plane of the image: each plane then slices the
function in the area of intersection. If a different color is assigned to each side of the plane, any
pixel whose intensity is above the plane will be coded with one color, and any pixel below the
plane will be coded with another. The result is a two-color image whose relative appearance
can be controlled by moving the slicing plane up and down the intensity axis. A simple but
practical example of density slicing is given in figure 3.1.
Figure 3.1: Result of density slicing into 8 colors on a
monochrome image of Picker Thyroid Phantom.
12
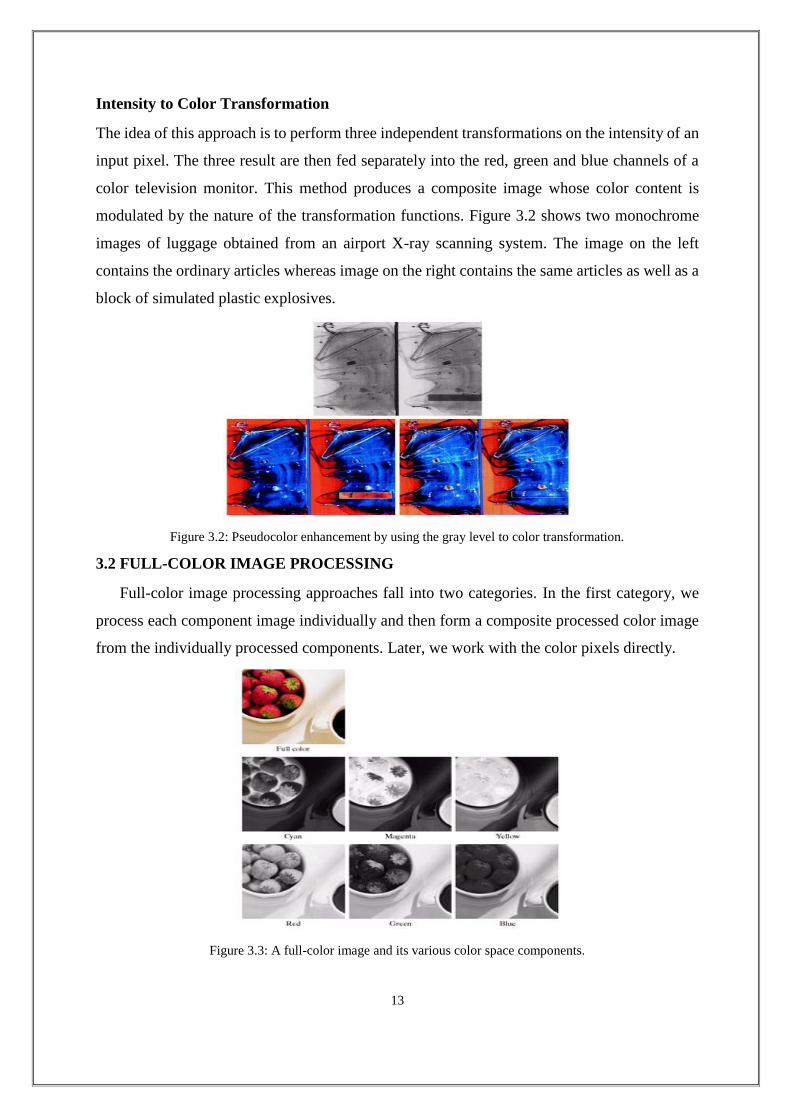
Intensity to Color Transformation
The idea of this approach is to perform three independent transformations on the intensity of an
input pixel. The three result are then fed separately into the red, green and blue channels of a
color television monitor. This method produces a composite image whose color content is
modulated by the nature of the transformation functions. Figure 3.2 shows two monochrome
images of luggage obtained from an airport X-ray scanning system. The image on the left
contains the ordinary articles whereas image on the right contains the same articles as well as a
block of simulated plastic explosives.
Figure 3.2: Pseudocolor enhancement by using the gray level to color transformation.
3.2 FULL-COLOR IMAGE PROCESSING
Full-color image processing approaches fall into two categories. In the first category, we
process each component image individually and then form a composite processed color image
from the individually processed components. Later, we work with the color pixels directly.
Figure 3.3: A full-color image and its various color space components.
13
CHAPTER 4
MULTIRESOLUTION & MORPHOLOGICAL IMAGE PROCESSING
4.1 WAVELETS & MULTIRESOLUTION PROCESSING
Wavelet transform are based on small waves called wavelets of varying frequencies and
limited duration. Multiresolution theory incorporates and unifies techniques from a variety of
disciplines, including subband coding from signal processing, quadrature mirror filtering from
digital speech recognition and pyramidal image processing. This theory is concerned with
representation and analysis of images at more than one resolution. Thus, the features that might
go undetected at one resolution may be easy to detect at another [7].
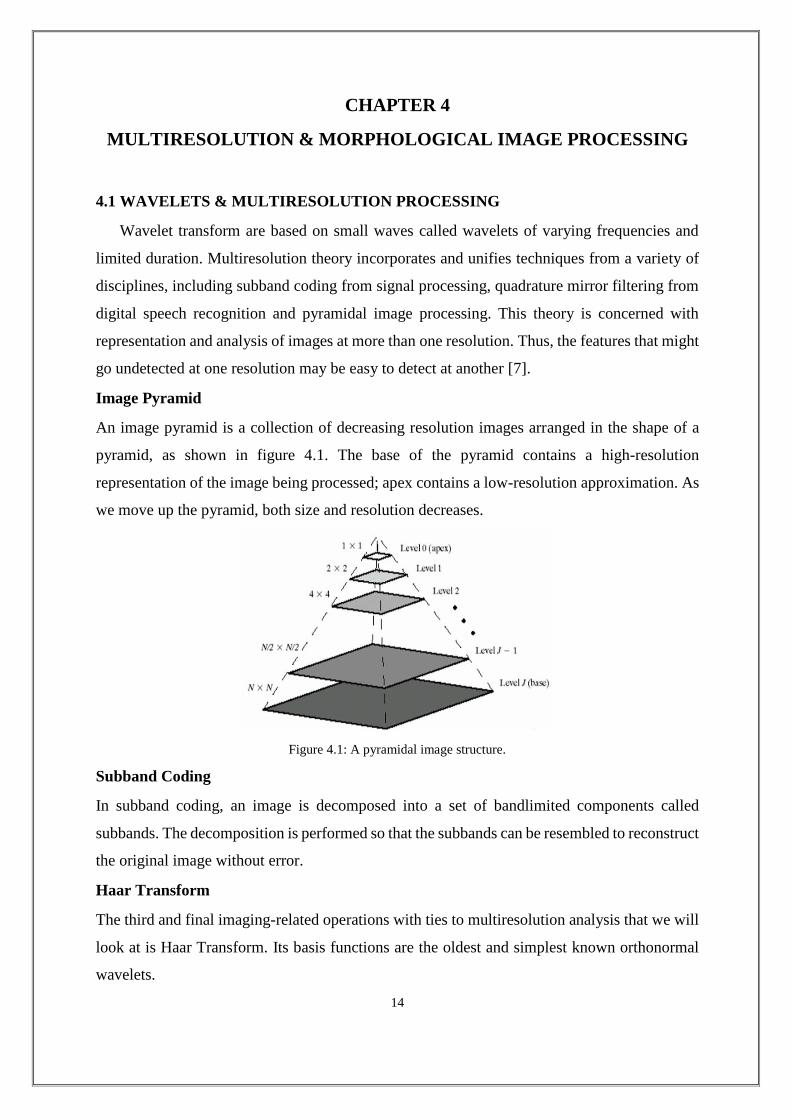
Image Pyramid
An image pyramid is a collection of decreasing resolution images arranged in the shape of a
pyramid, as shown in figure 4.1. The base of the pyramid contains a high-resolution
representation of the image being processed; apex contains a low-resolution approximation. As
we move up the pyramid, both size and resolution decreases.
Figure 4.1: A pyramidal image structure.
Subband Coding
In subband coding, an image is decomposed into a set of bandlimited components called
subbands. The decomposition is performed so that the subbands can be resembled to reconstruct
the original image without error.
Haar Transform
The third and final imaging-related operations with ties to multiresolution analysis that we will
look at is Haar Transform. Its basis functions are the oldest and simplest known orthonormal
wavelets.
14

4.2 MORPHOLOGICAL IMAGE PROCESSING
Morphology describes a range of image processing techniques that deal with the shape of
features in an image. Morphological operations are typically applied to remove imperfections
introduced during segmentation, and so typically operate on bi-level images. Fundamentally,
morphological image processing is very like spatial filtering. The structuring element is moved
across every pixel in the original image to give a pixel in a new processed image. The value of
this new pixel depends on the operation performed. Fundamental operations for morphological
image processing are discussed below [4].
Erosion
Erosion shrinks or thins objects in a binary image. In fact, we can view erosion as a
morphological filtering operation in which image details smaller than the structuring element
are filtered (removed) from the image.
Dilation
Unlike erosion, which is a shrinking or thinning operation, dilation grows or thickens objects
in a binary image. The specific manner and extent of this thickening is controlled by the shape
of the structuring element used. One of the simplest applications of dilation is to bridge gaps.
Figure 4.2: Erosion to remove image components. Figure 4.3: Dilation of sample text.
Opening and Closing
These operations are the combinations of erosions and dilations. Opening generally smoothens
the contour of an object, breaks narrow isthmuses and eliminates thin protrusions. Closing also
tends to smooth sections of contours but, as opposed to opening, it generally fuses narrow
breaks and long thin gulfs, eliminates small holes and fills gaps in the contour.
15

CHAPTER 5
IMAGE SEGMENTATION
Segmentation subdivides an image into its constituent regions or objects. The level of detail
to which the subdivision is carried depends on the problem being solved. That is, segmentation
should stop when the objects or regions of interest in an application have been detected.
Segmentation is based on one of the two basic properties of intensity values: discontinuity and
similarity. In the first category, the approach is to partition an image based on abrupt changes
in intensity, such as edges. The principal approach in the second category are based on
partitioning an image into regions that are similar according to a set of predefined criteria [8].
Detection of discontinuities
This type of segmentation methods are based on detecting sharp, local changes in intensity.
There are three basic types of grey level discontinuities that we tend to look for in digital
images: isolated points, lines and edges. Points are detected at those pixels in the subsequent
filtered image that are above a set threshold. An edge is a set of connected pixels that lie on the
boundary between two regions. Often, problem arise in edge detection is that there are too much
details. One way to overcome this is to smooth images prior to edge detection. A line may be
viewed as an edge segment in which the intensity of the background on either side of the line
is either much higher or much lower than the intensity of the line pixels.
Thresholding
Thresholding is usually the first step in any segmentation approach. Because of its intuitive
properties, simplicity of implementation and computational speed, image thresholding enjoys a
central position in applications of image segmentation. Key factors affecting the properties of
the intensity thresholding are: the separation between the peaks (the further apart the peaks are,
the better the chances of separating the modes), the noise content in the image (the mode
broadens as the noise increases), the relative sizes of objects and background, the uniformity of
the illumination source and the uniformity of the reflectance properties of the image.
16
CHAPTER 6
IMAGE COMPRESSION & REPRESENTATION
6.1 IMAGE COMPRESSION
Image compression, the science and art of reducing the amount of data required to represent
an image, is one of the most useful and commercially successful technologies in the field of
digital image processing. The number of images that are compressed and decompressed daily
are staggering, and compressions and decompressions themselves are virtually invisible to the
user.
To better understand the need for compact image representation, consider the amount of
data required to represent a two-hour standard definition (SD) movie using 720 X 480 X 24 bit
pixel arrays. A digital movie is a sequence of video frames in which each frame is a full-color
still image. Because video players must display the frames sequentially at rates near 30fps
(frames per second), SD digital video consists of 224 GB of data. Twenty-seven 8.5 GB dual-
layer DVDs are needed to store it. To put a two-hour movie on a single DVD, each frame must
be compressed on average by a factor of 26.3. The compression must be higher for high
definition (HD) television where image resolutions reach 1920 X 1080 X 24 bits/image.
Compression can reduce transmission time by a factor of 2 to 10 or more. In the same way, the
number of uncompressed full-color images that an 8-megapixel digital camera can store on a
1-GB flash memory card can be increased. In addition to these applications, image compression
plays an important role in many other areas including tele video conferencing, remote sensing,
document and medical imaging and facsimile transmission.
Thus most frequently used compressing techniques used are discussed below. Compression is
achieved when one or more redundancy is reduced or eliminated. The computer-generated
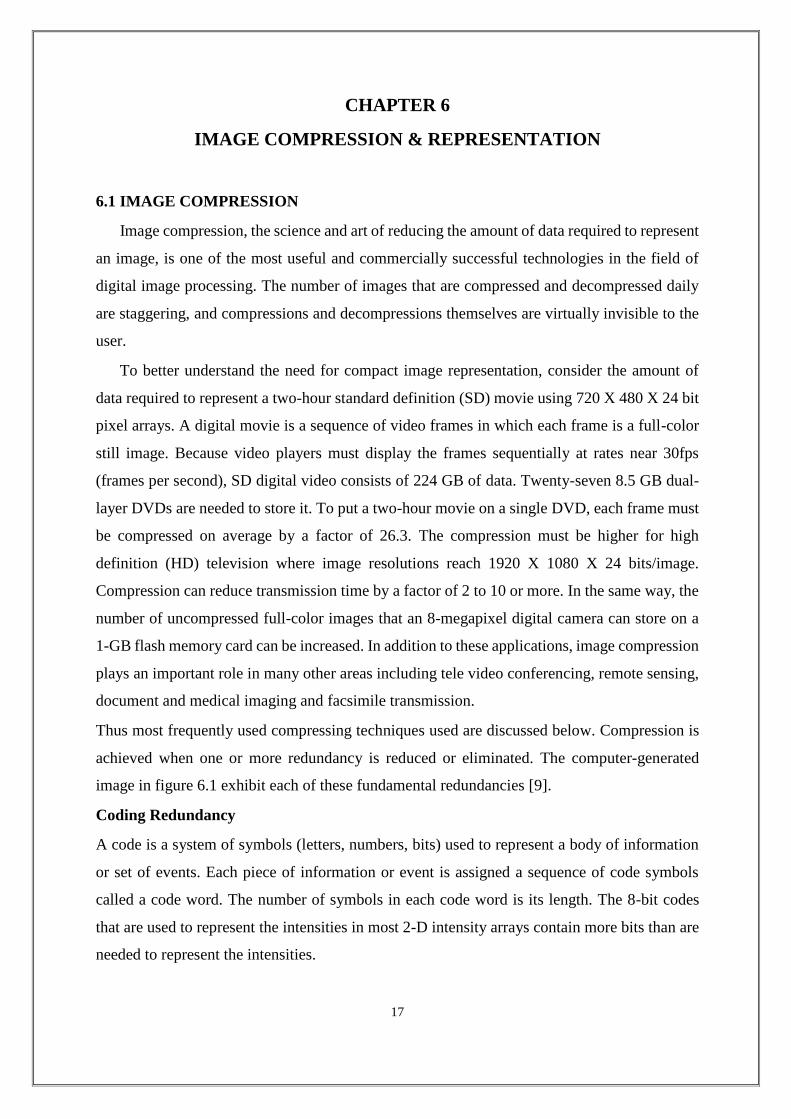
image in figure 6.1 exhibit each of these fundamental redundancies [9].
Coding Redundancy
A code is a system of symbols (letters, numbers, bits) used to represent a body of information
or set of events. Each piece of information or event is assigned a sequence of code symbols
called a code word. The number of symbols in each code word is its length. The 8-bit codes
that are used to represent the intensities in most 2-D intensity arrays contain more bits than are
needed to represent the intensities.
17
Spatial and Temporal Redundancy
Because the pixels of most 2-D intensity arrays are correlated spatially (i.e., each pixel is similar
to or dependent on neighboring pixels), information is unnecessarily replicated in the
representations of the correlated pixels. In a video sequence, temporal correlated pixels (i.e.,
those similar to or dependent on pixels in nearby frames) also duplicate information.
Irrelevant Information
One of the simplest ways to compress a set of data is to remove superfluous data from the set.
Most 2-D intensity arrays contain information that is ignored by the human visual system and/or
extraneous to the intended use of an image and thus are obvious candidates of omission. It is
redundant in the sense that it is not used.
(a) (b) (c)
Figure 6.1: Computer Generated 256 X 256 X 8 bit images with
(a) coding redundancy (b) spatial redundancy (c) irrelevant information.
6.2 REPRESENTATION & DESCRIPTION
After an image has been segmented into regions, the resulting aggregate of segmented pixels
usually is represented and described in a form suitable for further computer processing.
Basically, representing a region involves two choices: we can represent the region in terms of
its external characteristics (its boundaries) or on terms of its internal characteristics (pixels
comprising the region). An external representation is chosen when the primary focus is ion
shape characteristics. An internal characteristics is selected when the primary focus is on
regional properties, such as colour and texture. Sometimes it may be necessary to use both types
of representation. Choosing a representation scheme is only part of the task of making data
useful to a computer. The next task is to describe the region based on the chosen representation.
18

Representation
Chain codes are used to represent a boundary by a connected sequence of straight-line segments
of specified length and direction. Typically, this representation is based on 4- or 8-connectivity
of the segments. The direction of each segment is coded by a numbering scheme. A boundary
code formed as a sequence of such directional numbers is referred to as a Freeman chain code.
A signature 1-D functional representation of a boundary and may be generated in various ways.
One of the simplest is to plot the distance from the centroid to the boundary as a function of
angle. An important approach to representing the structural shape of a plane region is to reduce
it to a graph. This reduction may be accomplished by obtaining the skeleton of the region via a
thinning (skeletonizing) algorithm. Thinning procedures play central role in a broad range of
problems in image processing, ranging from automated inspection of printed circuit boards to
counting of asbestos fibres in air filters.
Boundary Descriptors
The length of a boundary is one of its simplest descriptors. The number of pixels along a
boundary gives a rough approximation of its length. The value of the diameter and the
orientation of a line segment connecting the two extreme points that comprise the diameter are
also useful descriptors of a boundary.
Curvature is defined as the rate of change of slope. In general, obtaining reliable measures of
curvature at a point in a digital boundary is difficult because these boundaries tend to locally
ragged. However, using the difference between the slopes of adjacent boundary segments as a
descriptor of curvature at the point of intersection of the segments sometimes proves useful.
Regional Descriptors
The area of a region is defined as the number of pixels in the region. The perimeter of a region
is the length of its boundary. Although area and perimeter are sometimes used as descriptors,
they apply primarily to situations in which the size of the regions of interest is invariant. A more
frequent use of these two descriptors is in measuring compactness of a region defined as
(perimeter)2/area. A slightly different descriptor of compactness is the circularity ratio, defined
as the ratio of the area of a region to the area of a circle having the same perimeter. Other simple
measures used as region descriptors include the mean and median of the intensity levels, the
minimum and maximum intensity values and the number of pixels with values above and below
the mean.
19
Topological Descriptors
Topological properties are useful for global descriptions of regions in the image plane.
Topology is the study of properties of a figure that are unaffected by any deformation, as long
as there is no tearing or joining of the figure. For example, if a topological descriptor is defined
by the number of holes in the region, this property obviously will not be affected by a stretching
or rotation transformation. Another topological property is the number of connected
components.
6.3 OBJECT RECOGNITION
The approaches to object or pattern recognition are divided into two principal areas:
decision-theoretic and structural. The first category deals with patterns described using
quantitative descriptors such as length, area or texture. The second category deals with
patterns best described by qualitative descriptors such as the relational descriptors.
Recognition techniques based on matching represent each class by a prototype pattern
vector. An unknown pattern is assigned to the class to which it is closest in terms of a
predefined metric. The simplest approach is the minimum distance classifier, which, as its
name implies, computes the distance between the unknown and each of the prototype vectors.
It chooses the smallest distance to make a decision. The structural methods seek to achieve
pattern recognition by capitalizing precisely on structural relationships.
20
CHAPTER 7
FIELDS OF APPLICATION
The areas of application of digital image processing are so varied that some form of
organization is desirable in attempting to capture the breadth of this field. One of the simplest
way to develop a basic understanding of the extent of image processing applications is to
categorize images according to their source (e.g., visual, X-ray and so on). The principal energy
source for images in use today is the electromagnetic energy spectrum. Images based on
radiation from the EM spectrum are the most familiar. Other important sources of energy
include acoustic, ultrasonic and electronic (in the form of electron beams used in electron
microscopy). Synthetic images, used for modelling and visualization, are generated by
computer [1].
Imaging in EM Spectrum
Major uses of imaging based on gamma rays include nuclear medicine and astronomical
observations. In nuclear medicine, the approach is to inject a patient with a radioactive isotope
that emits gamma rays as it decays. Images are produced from the emissions collected by
gamma ray detectors. Images of this sort are used to locate sites of bone pathology, such as
infections or tumours.
X-rays are among the oldest sources of EM radiation used for imaging. The best known use
of X-rays is medical diagnostics, but they also are used extensively in industry and other areas,
like astronomy. X-rays for medical and industrial imaging are generated using an X-ray tube,
which is a vacuum tube with a cathode and anode. The cathode is heated, causing free electrons
to be released. These electrons flow at high speed to the positively charged anode. When the
electrons strike a nucleus, energy is released in the form of X-ray radiation. The energy
(penetrating power) of the X-rays is controlled by a voltage applied across the anode and the
number of X-rays is controlled by a current applied to the filament in the cathode.
Applications of ultraviolet light are varied. They include lithography, industrial inspection,
microscopy, lasers, biological imaging and astronomical observations. Ultraviolet light is used
in fluorescence microscopy, one of the fastest growing areas of microscopy. The basic task of
the fluorescence microscope is to use an excitation light to irradiate a prepared specimen and
then to separate the much weaker radiating fluorescent light from the brighter excitation light.
21
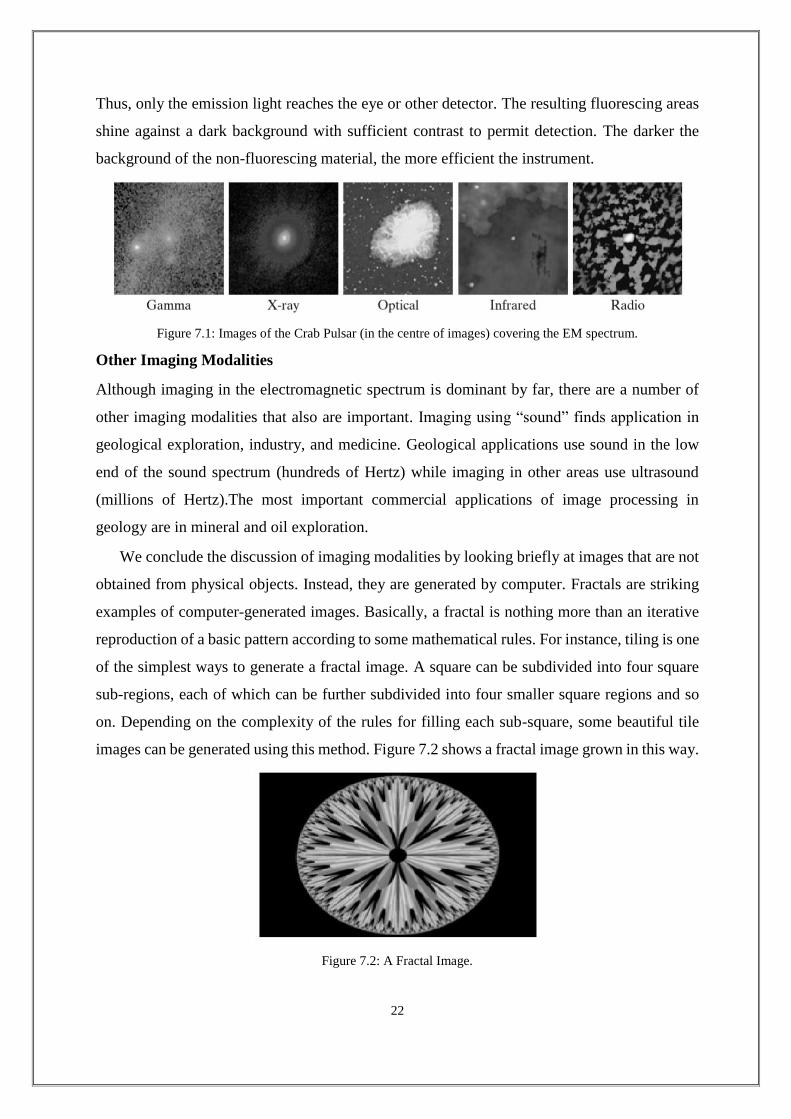
Thus, only the emission light reaches the eye or other detector. The resulting fluorescing areas
shine against a dark background with sufficient contrast to permit detection. The darker the
background of the non-fluorescing material, the more efficient the instrument.
Figure 7.1: Images of the Crab Pulsar (in the centre of images) covering the EM spectrum.
Other Imaging Modalities
Although imaging in the electromagnetic spectrum is dominant by far, there are a number of
other imaging modalities that also are important. Imaging using “sound” finds application in
geological exploration, industry, and medicine. Geological applications use sound in the low
end of the sound spectrum (hundreds of Hertz) while imaging in other areas use ultrasound
(millions of Hertz).The most important commercial applications of image processing in
geology are in mineral and oil exploration.
We conclude the discussion of imaging modalities by looking briefly at images that are not
obtained from physical objects. Instead, they are generated by computer. Fractals are striking
examples of computer-generated images. Basically, a fractal is nothing more than an iterative
reproduction of a basic pattern according to some mathematical rules. For instance, tiling is one
of the simplest ways to generate a fractal image. A square can be subdivided into four square
sub-regions, each of which can be further subdivided into four smaller square regions and so
on. Depending on the complexity of the rules for filling each sub-square, some beautiful tile
images can be generated using this method. Figure 7.2 shows a fractal image grown in this way.
Figure 7.2: A Fractal Image.
22

CONCLUSION
Having concluded study of the material in the preceding eleven chapters, we are now in a
position of being able to understand the principal areas panning the field of digital image
processing, both from a theoretical point of view as well as practical point of view. The main
purpose of the material was to provide a sense of perspective about the origins of digital image
processing and more important about the current and future areas of application of this
technology. Care was taken throughout all discussion to lay a solid foundation upon which
further study of this and related fields could be based. Although the coverage of the topics was
necessarily incomplete due to space limitations, it should have left you with a clear impression
of the breadth and practical scope of digital image processing. Given the task-specific nature of
many imaging problems, a clear understanding of basic principles enhances significantly the
chances for their successful solution.
23
REFERENCES
[1] Andrews, H. C. [1970]. Computer Techniques in Image Processing, Academic Press, New
York.
[2] Baxes, G.A [1994]. Digital Image Processing: Principals and Applications, John Wiley &
Sons, New York.
[3] Gonzalez, R. C. and Woods, R. E. [2002]. Digital Image Processing, 2nd ed., Prentice Hall,
Upper Saddle River, NJ.
[4] Jain, A.K [1989]. Fundamentals of Digital Image Processing, Prentice Hall, Upper Saddle
River, NJ.
[5] Petrou, M. and Bosdogianni, P.[1999]. Image Processing: The Fundamentals. John Wiley
& Sons, New York.
[6] Pratt, W.K. [1991] Digital Image Processing, 2nd ed., Wiley-Interscience, New York.
[7] Russ, J.C.[1999]. The Image Processing Handbook, 3rd ed., CRC Press, Boca Raton, FL.
[8] Schalkoff, R. J. [1989]. Digital Image Processing and Computer Vision, John Wiley &
Sons, New York.
[9] Umabaugh, S. E. [2005]. Computer Imaging: Digital Image Analysis and Processing, CRC
Press, Boca Raton, FL.
24
Related Documents











