Cintia Ayumi Kagueyama Sintonia do controlador PID: Método de Ziegler Nichols Modificado. Londrina, 2011

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Cintia Ayumi Kagueyama
Sintonia do controlador PID: Método de Ziegler Nichols
Modificado.
Londrina, 2011

UNIVERSIDADE ESTADUAL DE LONDRINA
CURSO DE GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Sintonia do controlador PID: Método de Ziegler Nichols
Modificado.
Trabalho de conclusão de curso submetido à
Universidade Estadual de Londrina
como parte dos requisitos para a obtenção
do grau de Engenheiro Eletricista.
Londrina, outubro de 2011.

Cintia Ayumi Kagueyama
Sintonia do controlador PID: Método de Ziegler Nichols
Modificado.
Monografia apresentada ao curso de
Engenharia Elétrica da Universidade
Estadual de Londrina, como requisito
parcial para a conclusão do curso de
Engenharia Eletrica.
BANCA EXAMINADORA
____________________________________
Prof. Dr. Márcio Roberto Covacic
Universidade Estadual de Londrina
____________________________________
Prof. Dr. Leonimer Flávio de Melo
Universidade Estadual de Londrina
____________________________________
Prof. Dr. Ruberlei Gaino
Universidade Estadual de Londrina
Londrina, 28 de novembro de 2011.

i
Agradecimentos
Agradeço a minha família pelo apoio incondicional e exagerado.
Ao meu orientador pela cooperação e paciência.
Aos professores pelo aprendizado.
Aos meus amigos, pelos momentos inestimaveis.

ii
“O homem, porque não tem senão uma vida, não tem possibilidade de
verificar a hipótese através de experimentos. Tudo é vivido pela primeira
vez e sem preparação. Como se um ator entrasse em cena sem nunca
ter ensaiado”. Milan Kundera

iii
KAGUEYAMA, Cintia Ayumi. Sintonia do controlador PID: Método de Ziegler
Nichols Modificado. 2011. 58 p. Trabalho de Conclusão de Curso (Graduação em
Engenharia Eletrica) – Universidade Estadual de Londrina, Londrina, 2011.
Resumo
O controle Proporcional integral e derivativo é a estratégia de controle mais utilizada no mercado (Knospe, 2006). O método de ajuste de Ziegler-Nichols é um método heurístico de sintonizar o controlador, e ainda é amplamente aplicado até hoje, em sua forma original, mas comumente em uma forma modificada. Este trabalho propõe estudar o método de ajuste de Ziegler Nichols modificado para controladores PID digitais, e seu desempenho, considerando também o ganho de malha. O algoritmo para se chegar aos parâmetros críticos substitui a etapa experimental, e são analisados os efeitos do método e a inferência da amostragem, no âmbito digital.
Palavras-chave: CONTROLADOR PID. SINTONIA. DESEMPENHO. DIGITAL.

iv
KAGUEYAMA, Cintia Ayumi. Sintonia do controlador PID: Método de Ziegler
Nichols Modificado. 2011. 58 p. Trabalho de Conclusão de Curso (Graduação em
Engenharia Eletrica) – Universidade Estadual de Londrina, Londrina, 2011.
Abstract
The proportional integral and derivative control is the most widely used control strategy in the market (Knospe, 2006). The setting method of Ziegler-Nichols is a heuristic method to tune the controller, and is still widely used today in its original form, but often in a modified form. This work proposes to study the method of Ziegler Nichols tuning PID controllers modified to digital, and its performance, considering also the loop gain. The algorithm to reach the critical parameters replaces the experimental stage, and we analyze the effects of the method of sampling and inference in the digital realm. Key words: PID CONTROL. TUNE. PERFORMANCE.DIGITAL.
v
Conteúdo
Lista de Figuras
Notações
1 Introdução .................................................................................................. 1
1.1 Ajuste do controlador ..................................................................................... 2
1.1.1 Setpoint (Valor de referência) .................................................................. 2
1.1.2 Perturbação de carga .............................................................................. 3
1.2 Métodos de ajuste .......................................................................................... 3
1.3 Objetivos e Justificativa .................................................................................. 4
1.4 Metodologia e disposição dos capítulos: ........................................................ 5
2 Sistemas discretos .................................................................................... 6
2.1 Análise do sistema dinâmico .......................................................................... 6
2.2 Mapeamento entre o plano S e o plano Z: ..................................................... 7
2.3 Estabilidade e análise transiente para sistemas discretos ........................... 10
3 Discretização: .......................................................................................... 13
3.1 Amostragem ................................................................................................. 15
3.1.1 Sample & Hold ....................................................................................... 16
3.2 Período de amostragem para controladores digitais .................................... 18
4 Controlador PID ...................................................................................... 19
4.1 Estrutura ....................................................................................................... 19
4.1.1 Ação proporcional .................................................................................. 19
4.1.2 Ação Integral.......................................................................................... 19
4.1.3 Ação derivativa ...................................................................................... 20
4.1.4 Controlador ............................................................................................ 21
4.2 Controle PID digital ...................................................................................... 22
5 Alocação dos pólos ................................................................................. 26
6 Método de Ziegler Nichols Modificado .................................................. 30
6.1 Sintonia experimental por Ziegler-Nichols de malha fechada. ..................... 30
6.2 Método de Ziegler Nichols Modificado ......................................................... 30
vi
6.2.1 Atraso de tempo .................................................................................... 31
6.2.2 Cálculo do Ganho e Período Crítico ...................................................... 31
6.3 Definição dos parâmetros do controlador: .................................................... 35
6.4 Para sistemas de segunda ordem: ............................................................... 36
7 Resultados: .............................................................................................. 38
7.1 Para o caso sub-amortecido: ....................................................................... 38
7.1.1 Variação de parâmetros ........................................................................ 40
7.2 Para a planta com fase não mínima: ............................................................ 42
7.2.1 Variação de parâmetros ........................................................................ 44
7.3 Tempo de amostragem: ............................................................................... 46
8 Conclusões: ............................................................................................. 52
9 Referências .............................................................................................. 53
10 Apêndices ................................................................................................. 55
10.1 Anexo A –Simulação Planta ...................................................................... 55
10.2 Anexo B –Verificação dos parâmetros ...................................................... 59

vii
Lista de figuras
Figura 2.1: Equivalência das raízes com parte real constante.(OGATA,1995) ........... 8
Figura 2.2: Equivalência das raízes com parte imaginária constante, do plano S para
o plano Z. (OGATA,1995) ........................................................................................... 9
Figura 2.3: Equivalência das raízes com fator de amortecimento constante, do plano
S para o plano Z. (OGATA,1995) .............................................................................. 10
Figura 2.4: Resposta transiente do sistema. ............................................................. 11
Figura 3.1 :Sistema em tempo Contínuo ................................................................... 13
Figura 5.1: Sistema em tempo discreto ..................................................................... 26
Figura 6.1: Exemplo de Resposta de um sistema ao ganho crítico. .......................... 30
Figura 6.2: Sistema controlado por PID .................................................................... 31
Figura 6.3: Par de pólos conjugados em z=1 ............................................................ 34
Figura 6.4: Par de pólos conjugados em z=1 ........................................................... 34
Figura 6.5: projeção de um ponto no círculo de raio ................................................. 35
Figura 7.1: Resposta do sistema para o ganho Kc calculado ................................... 38
Figura 7.2: root-locus do sistema, com ganho Kc=1,8 para o pólo em -1 ................. 38
Figura 7.3: Resposta dos controladores (a) Proporcional (b) PD (c)PI. .................... 39
Figura 7.4: Resposta do sistema: (a) sem controlador (b) com o PID. ..................... 40
Figura 7.5: Resposta para valores diferentes de K. .................................................. 41
Figura 7.6: Resposta do sistema para ganho K=0.5. ................................................ 41
Figura 7.7: Raízes do sistema: (a) para a planta; (b) com o PID. .............................. 42
Figura 7.8: Resposta do sistema para o ganho Kc calculado ................................... 43
Figura 7.9: root-locus do sistema, com ganho Kc=3,15 para o pólo em -1 .............. 43
Figura 7.10: Resposta do sistema: (a) sem controlador (b) com PID. ....................... 43
Figura 7.11: Resposta com os controladores (a) Proporcional (b) PD (c) PI. ............ 44
Figura 7.12: Resposta do sistema a diferentes valores de ganho K. ........................ 45
Figura 7.13: Resposta para o ganho K=2. ................................................................. 45
Figura 7.14: Raízes do sistema: (a) para a planta; (b) com o PID. ............................ 46
viii
Figura 7.15: Resposta do sistema 1 para (a) sem e (b) com controle, para o tempo
de amostragem To=0,5s. .......................................................................................... 47
Figura 7.16: Resposta do sistema 1 para (a) sem e (b) com controle, para o tempo
de amostragem To=2s. ............................................................................................. 48
Figura 7.17: Resposta do sistema 2 para (a) sem e (b) com controle, para o tempo
de amostragem To=0,5s. .......................................................................................... 49
Figura 7.18: Resposta do sistema 2 para (a) sem e (b) com controle, para o tempo
de amostragem To=2s. ............................................................................................. 49
ix
Notações
Função com domínio em S
Função com domínio em Z
Raízes conjugadas de uma equação
Valor absoluto de
Função de transferência do amostrador de primeira ordem
Transformada de Laplace inversa.
Transformada Z.
1
1 Introdução
O controlador PID (proporcional integral derivativo) é amplamente
usado em processos industriais, pois possui uma estrutura relativamente simples,
mas suficiente para o uso em inúmeros processos. Cerca de 98% dos sistemas de
controle na indústria de celulose utilizam controladores PI (proporcional e integral)
(SILVA et al., 2002).
A ação proporcional provoca uma reação do sistema proporcional ao
erro presente, ou seja, em um controlador, cuja ação de controle é proporcional, a
relação entre a saída do controlador e o sinal de erro atuante , que é a
entrada do controlador, é dada por um ganho simples, , e funciona
essencialmente como um amplificador com um ganho ajustável. Um aumento da
ação proporcional geralmente ocasiona melhora na precisão do sistema em malha
fechada. A ação integral proporciona melhoria na precisão do sistema em regime
permanente, pois ela atua de acordo com uma taxa proporcional ao erro atuante, ou
melhor, seu sinal de controle é um sinal proporcional à integral do erro. A ação
derivativa consiste na aplicação de um sinal de controle proporcional à derivada do
sinal de erro, é tida como antecipatória, podendo proporcionar melhora na
velocidade do sistema em malha fechada, e só apresenta influência em condições
transitórias: um sinal estabilizado em regime permanente possui erro constante cuja
derivada não existe. A partir desse momento, só têm atuação a parcela proporcional
do controle.
O controle proporcional e integral já tinha sido usado por um longo
tempo. A ação integral inicialmente veio para substituir um reset manual que era
usado em controladores proporcionais, para chegar ao valor correto de regime
permanente. O controlador com ação derivativa surgiu em 1935 e o controlador PID
se concretizou na primeira metade do século 20 (ASTROM,1995).
Os controladores PID foram originalmente implementados utilizando-
se de técnicas analógicas, como os relés pneumáticos (ASTRÖM et. al., 1998). O
uso de amplificadores operacionais veio posteriormente, e agora o uso de

2
microprocessadores na implementação de controladores é comum. A
implementação digital é possível com a discretização e a amostragem no tempo.
1.1 Ajuste do controlador
Para resolver um problema de controle, é preciso compreender qual
o objetivo do controlador. Com o controlador PID, o sistema adquire três novos
parâmetros que podem ser variados, em relação ao ganho proporcional, integral e
derivativo. À escolha desses parâmetros se dá o nome de ajuste de sintonia. É bom
lembrar que nos sistemas discretos, o período de amostragem também possui
influencia sobre a resposta do sistema a uma excitação.
A seleção dos parâmetros do PID, ou seja, a sintonia dos
controladores PID é a questão crucial no projeto do controlador geral. Esta operação
deve ser realizada de acordo com as especificações de controle. Geralmente, estão
relacionados tanto com o set-point ou com a perturbação de carga (VISIOLI, 1988).
1.1.1 Setpoint (Valor de referência)
Várias variáveis podem medir a fidelidade da resposta do sistema a
um valor de referência dado, como a precisão de tempo de estabilização, o
overshoot, e o erro de estado estacionário.
No controle de processos, os loops de controle possuem um ponto
de ajuste constante. O valor de saída pode ser alterado temporariamente, para
modificar outras condições de funcionamento, tais como taxas de velocidade. O
valor de referência é o valor que o sistema se propõe a atingir, ou seja, o erro é a
diferença entre esse valor e o sinal obtido de fato.
Esse parâmetro tem grande influência justamente porque o valor do
erro é dado em função dele. Em um sistema de controle on-off (que têm somente
dois possíveis valores de controle), o setpoint é o único parâmetro que define qual
será a saída do controlador: se o erro for negativo, ou seja, a saída for maior que o
setpoint, o controlador envia seu sinal mínimo, e se a saída for menor que o
controlador, causando um erro positivo, a saída do controlador é máxima. Da
mesma forma que para o controlador on-off, o valor de referência têm sua relação
com cada uma das ações dos controlador PID, e, ao invés de somente definir qual
3
será a saída entre duas opções, o valor de referência é usado de forma mais
complexa, o que veremos mais adiante.
Quando utilizamos uma função unitária na entrada (rampa, degrau,
pulso unitário), ela está normalizada, para que o valor de referência seja sempre
tomado como a unidade.
1.1.2 Perturbação de carga
A perturbação de carga é um distúrbio que se insere na malha de
controle e pode afastar as variáveis do processo dos valores requeridos. Pode ser
causada por diferentes fatores, como uma variação inesperada na alimentação do
sistema, na qualidade do feedback, entre outros. Por isso, a atenuação desses
distúrbios é de grande importância, principalmente para sistemas com problemas de
regulação, cujo valor nominal se mantém constante.
Pode ser representado por um sinal degrau unitário, pois geralmente
tem caráter de baixa freqüência. Para essa análise, vamos assumir uma perturbação
de carga na entrada do sistema.
1.2 Métodos de ajuste
Os métodos do ajuste de sintonia podem ser classificados em duas
categorias: experimental e analítico. Os métodos analíticos partem do modelo da
planta para calcular os parâmetros. Um controlador baseado na atribuição de pólos
faz parte dessa segunda categoria. Os pólos são alocados de forma a responder
adequadamente a um transiente (Kim e Schaefer, 2005). Assim se determina o
polinômio característico em malha fechada. Além da exigência de estabilidade, uma
configuração correta de pólos pode obter os parâmetros desejados de resposta em
malha fechada (como o overshoot e amortecimento).
Os métodos experimentais, também chamados de práticos, como os
de Ziegler-Nichols (OGATA,1995), consistem em analisar o comportamento do
processo e realizar o ajuste por meio de fórmulas pré-estabelecidas.
Estes métodos são amplamente utilizados, tanto em sua forma
original ou em alguma modificação, e muitas vezes formam a base para
procedimentos de ajuste utilizado pelos fabricantes e da indústria controlador de
4
processo. Os parâmetros do controlador são então expressos em termos das
características de fórmulas simples (ASTRÖM e HAGGLUND, 1995)
Os procedimentos de ajuste de Ziegler-Nichols apresentam, algumas
limitações, como proporcionar um sistema com boa rejeição a perturbações, mas
com ganho relativamente alto, e sem grande margem de estabilidade. No ambiente
digital, uma variação utilizada deste método é o método de Ziegler-Nichols
modificado, que se assemelha a alocação de pólos por usar cálculos analíticos para
determinar os parâmetros do controlador.
1.3 Objetivos e Justificativa
O controlador digital traz vantagens que fazem seu uso cada vez
mais freqüente, como a fácil implementação das leis de controle, e a menor
sensibilidade a ruídos e desgaste de componentes. As leis formuladas por Zielgler e
Nichols para o PID são hoje consideradas clássicas, e deram origem a diferentes
formas modificadas. Este trabalho tem como objetivo principal analisar o método de
Ziegler Nichols (chamado de “método do período critico” ou “método da oscilação
sustentada”) modificado por uma aproximação algébrica, e a influência da
amostragem na resposta do controlador.
Os objetivos específicos do trabalho consistem em primeiramente
analisar a aproximação do PID clássico para sua forma digital e a tradução dos
elementos da análise de controle contínuo para o discreto, com os parâmetros que
serão utilizados para descrever a resposta do sistema. Depois, será demonstrada a
alocação dos pólos na região desejada para um sistema discreto de segundo grau,
incorporando o conceito na análise do método propriamente.
Tendo uma análise satisfatória é possível verificar se a aplicação do
método modificado corresponde aos parâmetros esperados para o PID que Ziegler e
Nichols definiram, e quais são as prerrogativas de sua resposta no domínio discreto.
Essa parametrização pode posteriormente ser analisada também
para controladores digitais auto-ajustáveis. Um controlador digital trabalha com um
período de amostragem fixo, e transforma os sinais em dados numéricos singulares,
o que permite o auto-ajuste por meio de um algoritmo recursivo.

5
1.4 Metodologia e disposição dos capítulos:
Para avaliar a reposta do controlador, será utilizado um algoritmo no
programa , que converte as variáveis do sistema (analógico para digital) e
calcula os parâmetros para a oscilação critica e do controlador PID. Uma entrada
degrau aplicada permite verificar a reposta transiente, quanto ao setpoint e à
perturbação de carga.
No capítulo dois será dada uma introdução teórica sobre sistemas
discretos, a equivalência do plano S para o plano Z, e a análise de estabilidade para
sistemas discretos. No capitulo três é exposto o processo de discretização e o ZOH,
que foi o bloco utilizado na simulação dos sistemas. O quarto capítulo é dedicado ao
controlador PID, analisando cada uma de suas ações, e a alteração para o sistema
digital. O capitulo 5 aborda como os pólos são colocados algebricamente no
sistema, e no capitulo 6, o Método de Zielger Nichols modificado é explanado,
utilizando as definições introduzidas nos capítulos anteriores, de estabilidade crítica
no plano discreto, colocação dos pólos e a definição do controlador PID digital. A
análise dos resultados obtidos para um controlador definido pelos métodos é
apresentada no capitulo sete, e por fim, o capitulo 8 apresenta uma conclusão geral
sobre o trabalho.
6
2 Sistemas discretos
2.1 Análise do sistema dinâmico
Em um sistema de controle, um modelo dinâmico demonstra a
relação entre a entrada e o sinal de saída, o que é muito significativo quando se trata
de um problema de controle. Para um sistema linear invariante no tempo- que
respeita o princípio da superposição e cujo comportamento não varia com o tempo-
existe uma classe de modelos que podem ser usados.
Em um sistema de controle, geralmente temos que lidar com dois
sinais: o sinal de controle e a variável medida, onde a variável medida é vinculada
com a variável do processo físico que queremos melhorar (tensão, temperatura,
ruídos de medição). A dinâmica do processo trata da relação entre esses sinais.
Podemos analisar um sistema por meio de sua resposta transitória ou também por
sua resposta em freqüência.
Na análise de resposta transitória, caracteriza-se a dinâmica do
sistema observando sua resposta a um sinal que possa ser gerado
experimentalmente, como o degrau, pulso e rampa.
O uso da rampa é mais raro, enquanto a análise da resposta ao
degrau é mais comum, e a análise de resposta ao pulso é mais voltada aplicações
médicas e biológicas (KNOSPE, 2006). Sabemos que a resposta transitória de um
sistema de segunda ordem sob um degrau pode ser aproximada pelo seguinte
modelo de três parâmetros:
(2.1)
Os parâmetros são: o ganho estático , o coeficiente de
amortecimento e a freqüência natural . Para valores de na faixa ,
sabemos que a resposta transitória é oscilatória, e o sistema é denominado sub-
amortecido. Ele passa a ser criticamente amortecido quando e
superamortecido quando . Os valores de e determinam as características
do sistema como os tempos de subida acomodação , atraso e o sobre-sinal
, que serão mencionados na seção 2.3.
7
2.2 Mapeamento entre o plano S e o plano Z:
Para sistemas de controle com realimentação, a estabilidade dos
sistemas lineares com parâmetros invariantes no tempo é determinada pelos pólos
em malha fechada. Se tomarmos o modelo da equação (2.1) sabemos que esses
pólos são
(2.2)
Onde . Existe uma relação entre os elementos no
plano Z e no plano S. A transformada Z de um sinal amostrado é a transformada de
Laplace de uma seqüência discreta (Assunção).Sabemos que a relação de
transformação de um ponto no plano S para o Z é dada por:
( 2.1 )
Sendo s uma raiz com parte real e imaginária :
( 2.2 )
Distribuindo a exponencial vemos que ela é composta pelo termo , e que este
termo é na verdade:
( 2.3 )
Vemos que esta parte se repete a cada período com kϵZ, e que
todas as freqüências múltiplas inteiras da freqüência de amostragem ocupam a
mesma região do plano z.
Se o ângulo de z é igual a , z varia de acordo com . A
circunferência unitária pode ser traçado uma vez pelos pontos do plano s no eixo
imaginário, de
a
, para
, onde o módulo de z é um, e o seu ângulo
varia na faixa de – a .
Quando um ponto percorre o eixo imaginário de a , a
circunferência unitária no plano Z é cursada um número infinito de vezes. Um ponto
8
no plano Z não equivale a somente um ponto no plano S, mas sim a um infinito
número de pontos. A metade esquerda do plano S é toda contida dentro do círculo
unitário no plano Z, pois a parte real dos pólos correspondente é negativa, levando o
módulo da circunferência traçada por uma variação na fase ser menor que um, ou
simplesmente, porque o ponto z equivalente é menor que a unidade.
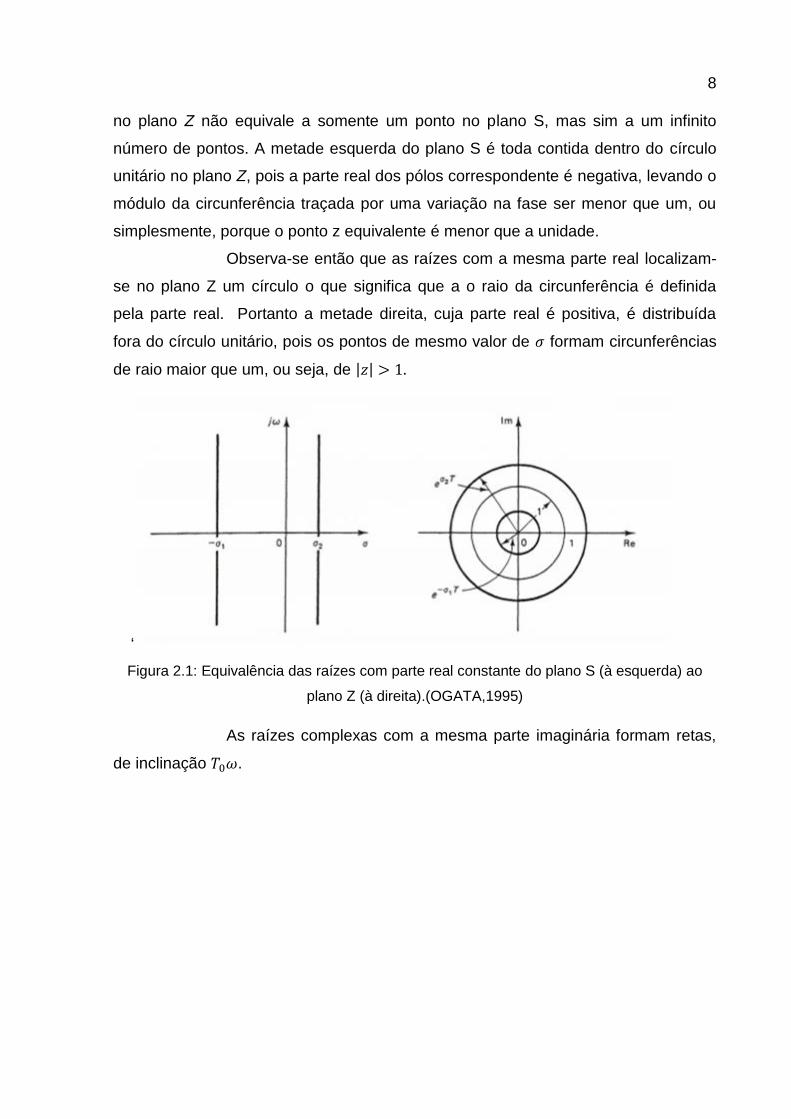
Observa-se então que as raízes com a mesma parte real localizam-
se no plano Z um círculo o que significa que a o raio da circunferência é definida
pela parte real. Portanto a metade direita, cuja parte real é positiva, é distribuída
fora do círculo unitário, pois os pontos de mesmo valor de formam circunferências
de raio maior que um, ou seja, de
„
Figura 2.1: Equivalência das raízes com parte real constante do plano S (à esquerda) ao
plano Z (à direita).(OGATA,1995)
As raízes complexas com a mesma parte imaginária formam retas,
de inclinação .

9
Figura 2.2: Equivalência das raízes com parte imaginária constante, do plano S (à esquerda)
para o plano Z (à direita). (OGATA,1995)
Podemos também avaliar como será a variação do plano em relação
a um fator de amortecimento constante. Se no plano S esse fator é representado por
uma linha radial, no plano z, é mapeado em uma espiral que termina na origem.
( 2.4 )
No plano Z:
( 2.5 )
Com o aumento de , o módulo de decresce e sua fase aumenta.
O mapeamento final forma a espiral logarítmica.

10
Figura 2.3: Equivalência das raízes com fator de amortecimento constante, do plano S (à
esquerda) para o plano Z (à direita). (OGATA,1995)
Para valores constantes de amortecimento localizados à esquerda
do eixo imaginário no plano S, a espiral decresce para dentro do círculo de raio
unitário no plano Z, e para os valores localizados à direita do mesmo eixo, a espiral
cresce para fora do círculo.
Então, para uma região desejada de pólos dominantes de malha
fechada em S há uma região correspondente dentro do plano Z, e o sistema discreto
deve respeitar essa equivalência na localização das suas raízes.
2.3 Estabilidade e análise transiente para sistemas discretos
Para analisar a estabilidade no plano Z, analisamos, da mesma
forma que para os sistemas em tempo contínuo, a localização dos pólos de malha
fechada, nesse caso de sua posição em relação à circunferência de raio unitário.
Para que um sistema seja criticamente estável como será requerido posteriormente,
um dos pólos deverá obrigatoriamente possuir a parte real negativa, o que significa
no plano Z estar localizado diretamente na circunferência de raio unitário.
Analisando as três possibilidades:
Para um sistema estável, a região de equivalência no plano Z é no
interior do círculo unitário, que, como visto, corresponde no plano S aos pólos com a
parte real negativa. Para um sistema criticamente estável, a região do limiar no
11
plano S é o eixo imaginário, que corresponde aos infinitos valores alocados na
circunferência unitária, e pelo menos um pólo deve estar localizado nesta, com todos
os outros no seu interior. Já um sistema instável possuirá um pólo ou mais fora do
círculo unitário, o que significa que o valor de sua parte real é maior que zero.
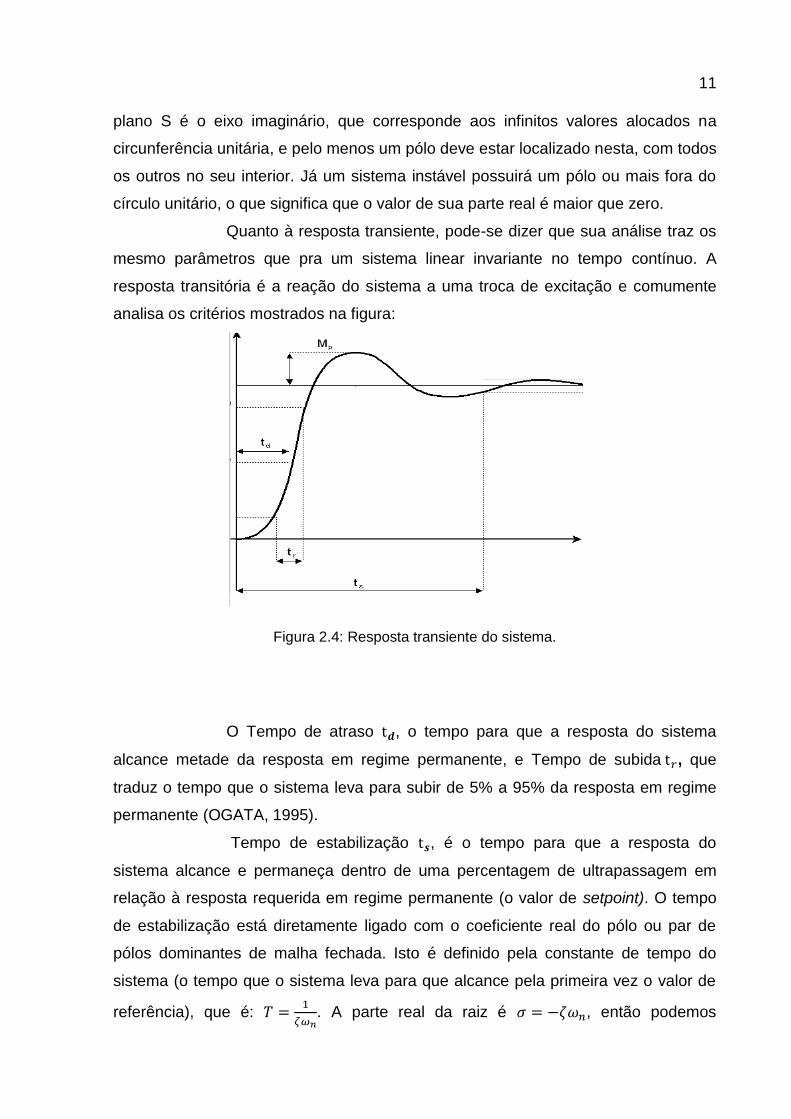
Quanto à resposta transiente, pode-se dizer que sua análise traz os
mesmo parâmetros que pra um sistema linear invariante no tempo contínuo. A
resposta transitória é a reação do sistema a uma troca de excitação e comumente
analisa os critérios mostrados na figura:
Figura 2.4: Resposta transiente do sistema.
O Tempo de atraso , o tempo para que a resposta do sistema
alcance metade da resposta em regime permanente, e Tempo de subida , que
traduz o tempo que o sistema leva para subir de 5% a 95% da resposta em regime
permanente (OGATA, 1995).
Tempo de estabilização , é o tempo para que a resposta do
sistema alcance e permaneça dentro de uma percentagem de ultrapassagem em
relação à resposta requerida em regime permanente (o valor de setpoint). O tempo
de estabilização está diretamente ligado com o coeficiente real do pólo ou par de
pólos dominantes de malha fechada. Isto é definido pela constante de tempo do
sistema (o tempo que o sistema leva para que alcance pela primeira vez o valor de
referência), que é:
. A parte real da raiz é , então podemos

12
estabelecer a seguinte relação para o sistema discreto: o aumento de aproxima o
pólo da origem e diminui . Semelhantemente, se o pólo se afasta da origem, o
tempo de estabilização acresce.
E por fim, o Máximo sobre-sinal , que se refere ao valor máximo
de sinal acima da referência a ser atingida, dado pela diferença percentual entre o
valor do pico e o valor em regime permanente. A porcentagem máxima de sobre-
sinal pode ser expressa por
(Lázaro,2008), e à medida que a relação entre
a parte real e imaginária do pólo for maior, esse valor é menor. Mas a relação entre
essas partes é tal que
. Observamos que à medida que à medida que
cresce, o valor do sobre-sinal diminui. Assim, essa relação pode ser vista
similarmente à relação das retas de amortecimento constante quando passadas
para o plano Z.
13
3 Discretização:
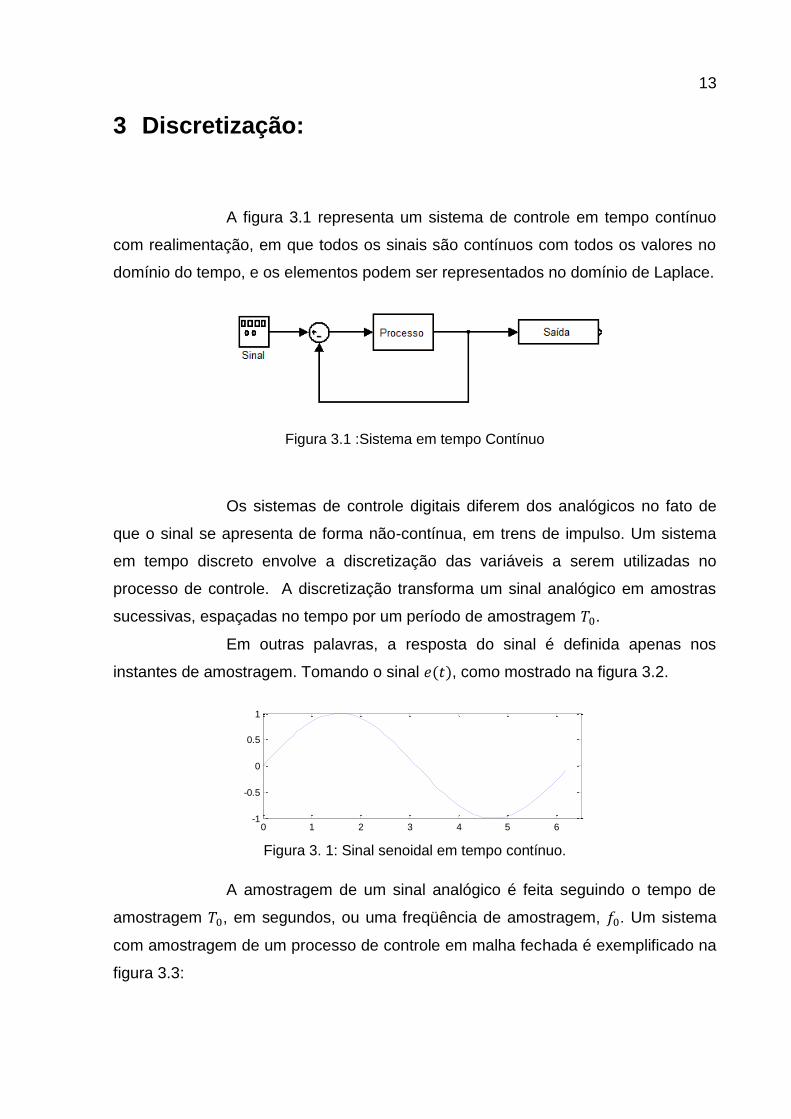
A figura 3.1 representa um sistema de controle em tempo contínuo
com realimentação, em que todos os sinais são contínuos com todos os valores no
domínio do tempo, e os elementos podem ser representados no domínio de Laplace.
Figura 3.1 :Sistema em tempo Contínuo
Os sistemas de controle digitais diferem dos analógicos no fato de
que o sinal se apresenta de forma não-contínua, em trens de impulso. Um sistema
em tempo discreto envolve a discretização das variáveis a serem utilizadas no
processo de controle. A discretização transforma um sinal analógico em amostras
sucessivas, espaçadas no tempo por um período de amostragem .
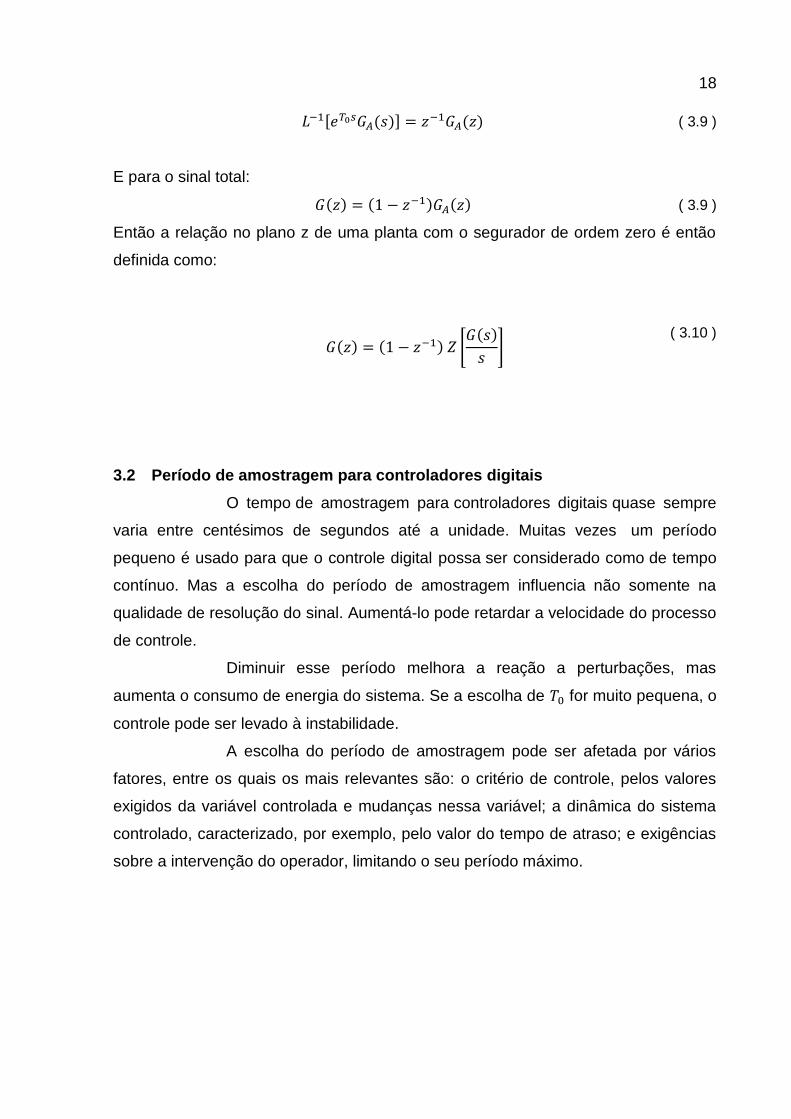
Em outras palavras, a resposta do sinal é definida apenas nos
instantes de amostragem. Tomando o sinal , como mostrado na figura 3.2.
Figura 3. 1: Sinal senoidal em tempo contínuo.
A amostragem de um sinal analógico é feita seguindo o tempo de
amostragem , em segundos, ou uma freqüência de amostragem, . Um sistema
com amostragem de um processo de controle em malha fechada é exemplificado na
figura 3.3:
0 1 2 3 4 5 6-1
-0.5
0
0.5
1

14
Figura 3. 2: Exemplo de sistema de controle em tempo discreto.
Temos um trem de implusos, :
( 3.1 )
Multiplicando trem de impulsos pelo sinal, obtemos o sinal
discretizado. Um sinal discretizado assume o valor do sinal contínuo em instantes
determinados de tempo.
Figura 3. 3: Sinal senoidal e equivalente discretizado.
Já um sinal quantizado atribui valores discretos para um sinal
contínuo de valores que variam infinitamente.
0 5 10-1.5
-1
-0.5
0
0.5
1
1.5
0 5 10-1.5
-1
-0.5
0
0.5
1
1.5
tempo
ampli
tude

15
Figura 3. 4: Impulso em tempo contínuo e quantizado.
Um sistema de amostragem geralmente envolve os dois processos ,
discretização e quantização. Existem, como podemos observar, erros entre a
passagem do sinal em tempo contínuo para o discreto. Neste trabalho, as figuras
referentes aos sinais discretizados são representadas como a figura 2.4,
representando também a discretização no tempo.
3.1 Amostragem
A amostragem ou discretização de um sinal analógico é feita seguindo a relação:
( 3.2)
Onde .
O período de amostragem deve obrigatoriamente seguir o teorema
de Nyquist, que estabelece que a freqüência de amostragem de um sinal analógico
deve ser pelo menos o dobro da maior freqüência do espectro desse sinal,
representada por B:
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
Impulso em tempo Continuo
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
Impulso em tempo Discreto
Time (sec)
Am
plit
ude

16
Então, para que o sinal contínuo possa ser corretamente
discretizado, a maior freqüência contida no sinal a ser amostrado deve ser menor
que metade da freqüência de amostragem
.
Podemos interpretar de tal forma: o sinal modula o trem de
impulsos, formando o sinal amostrado na Figura 3. 3. A saída de um amostrador é
um trem de impulsos modulado, mas isso pode não ser desejado, na realidade, o
que se procura é um sinal mais próximo do contínuo. Isso é obtido com o processo
de Sample &Hold, que abstrai um sinal contínuo de uma seqüência discreta.
3.1.1 Sample & Hold
Na prática, a conversão entre um sinal analógico e um digital é feito
por um bloco de sample & hold. O circuito amostra e retém um nível de tensão
durante o intervalo , que é o período de amostragem. ‘Sample‟ se refere à
amostragem do sinal, e ‘hold’, ao fato de que aquele valor de sinal é mantido até o
período seguinte, quando é feita uma nova amostra.
Figura 3. 5: Sistema com Sample & Hold. (SCHNITER, 2010).
Isso pode ser feito com um circuito data hold, que faz a interpolação
do sinal. A interpolação é responsável por manter o valor do sinal entre um intervalo
de pulsos, e para um sinal de entrada , dá a saída:
( 3.3 )

17
O valor de n define a ordem do data hold. Um segurador de ordem
zero se demonstra muitas vezes o mais adequado e suficiente para as aplicações de
controle. Este possui a saída:
( 3.4 )
Ou seja, a saída do circuito é mantida igual ao valor de entrada até o
próximo pulso, quando o valor da entrada atualiza. A função de transferência do
amostrador de ordem zero (chamado de ) é:
( 3.5 )
Para o plano discreto, Lazaro(2008) sugere que se faça antes a a
convolução de com , lembrando que ele se posiciona antes da planta
, então, e aplicamos a transformada Z para se obter a relação discreta dessa
planta:
( 3.6 )
No domínio do tempo:
( 3.7 )
Aplicando ao teorema da convolução, onde a transformada
de Laplace do produto de convolução entre duas funções, é igual ao produto das
transformadas de Laplace das duas funções, e chamando o termo
,
temos que a segunda parcela do lado direito da equação é:
( 3.8 )
Aplicando as propriedades da transformada Z, temos que:
18
( 3.9 )
E para o sinal total:
( 3.9 )
Então a relação no plano z de uma planta com o segurador de ordem zero é então
definida como:
( 3.10 )
3.2 Período de amostragem para controladores digitais
O tempo de amostragem para controladores digitais quase sempre
varia entre centésimos de segundos até a unidade. Muitas vezes um período
pequeno é usado para que o controle digital possa ser considerado como de tempo
contínuo. Mas a escolha do período de amostragem influencia não somente na
qualidade de resolução do sinal. Aumentá-lo pode retardar a velocidade do processo
de controle.
Diminuir esse período melhora a reação a perturbações, mas
aumenta o consumo de energia do sistema. Se a escolha de for muito pequena, o
controle pode ser levado à instabilidade.
A escolha do período de amostragem pode ser afetada por vários
fatores, entre os quais os mais relevantes são: o critério de controle, pelos valores
exigidos da variável controlada e mudanças nessa variável; a dinâmica do sistema
controlado, caracterizado, por exemplo, pelo valor do tempo de atraso; e exigências
sobre a intervenção do operador, limitando o seu período máximo.
19
4 Controlador PID
Estima-se que mais de 90% de malhas de controle empregam
controle PID (KNOSPE,2006) , muitas vezes com o ganho derivativo definido a zero.
O controlador PID se baseia em três ações de controle: a ação proporcional, a ação
integral e por fim, a derivativa.
Os três termos de um controlador PID cumprem três requisitos comuns da
maioria dos problemas de controle. A ação integral rende um erro de estado
estacionário zero em um rastreamento de setpoint constante (...) por outro
lado, o termo proporcional responde imediatamente ao erro, mas
normalmente não atinge a precisão desejada. Em algumas plantas esses
efeitos não se traduzem bem ao erro, e esta situação pode levar a grandes
erros transitórios quando o controle PI é usado. A ação derivativa combate
esse problema (Knospe, 2006)
4.1 Estrutura
Sabemos um controlador proporcional nem sempre é o suficiente
para obter a saída desejada para o sistema, e o controlador PID tem em sua
estrutura três parâmetros que podem ser ajustados para esse fim.
4.1.1 Ação proporcional
A ação proporcional atua na resposta transitória do sistema de forma
a diminuir o tempo de subida (tr) reduzindo também o erro de regime permanente.
Assumindo um controlador cujo sinal de controle seja , essa
ação aplica um sinal de controle , proporcional à amplitude do sinal de erro :
( 4.1 )
Um controlador proporcional trabalha sob os limites e , que
são respectivamente, o valor máximo e mínimo da variável de controle .
4.1.2 Ação Integral

20
O controlador integral é ligado à melhoria da precisão da resposta
em relação ao erro de regime permanente, mas pode agravar a resposta transitória
do sistema. A ação integral pode ser vista como um recurso que reseta o termo
imposto pelo controlador proporcional.
Essa ação é a aplicação de um sinal de controle , proporcional à
integral do sinal de erro , onde o tempo é o tempo integral:
( 4.2 )
Se a partir de um determinado tempo, o erro é igual a zero, o sinal
de controle é mantido em um valor constante. No sistema em malha fechada,
isso significa a obtenção de uma referência constante com erro nulo em regime
permanente (AGUIRRE, 2007, p. 263).
Esse fato pode ser mais facilmente constatado observando que a
função de transferência dessa ação:
( 4.3 )
Observa-se que a ação integral adiciona um pólo na função de
transferência de malha aberta do sistema, localizado na origem, o que afeta a
estabilidade e a velocidade de resposta do sistema, por isso não se usa o controle
puramente integral, mas sim combinado com uma ação proporcional.
A função principal do controle integral é assegurar que a saída do
processo tenha o valor requerido, de referência. O ganho proporcional geralmente
provoca um sinal de erro. Com uma ação integral, um erro positivo vai levar a um
aumento do sinal de controle, e um erro negativo leva a uma diminuição do sinal de
controle independente do tamanho do erro (ASTROM; HAGGLUND, 1995)
4.1.3 Ação derivativa

21
O propósito da ação derivativa é melhorar a estabilidade em malha
fechada. Pode-se dizer que essa ação tem característica antecipativa, ou preditiva.
O sinal de controle é dado por:
( 4.4 )
Essa implementação não é possível, o que pode ser melhor
observado por sua função de transferência:
( 4.5 )
Como no caso do controlador integral, ele é implementado junto à
ação proporcional, o que torna também o sistema mais viável visto que, se mantido
puramente derivativo, seria muito sensível a ruídos de alta freqüência.
O mecanismo de instabilidade pode ser descrito de tal forma: devido à
dinâmica do processo, demora algum tempo até que uma mudança na
variável de controle seja notável na saída do processo. Logo, o sistema de
controle atrasará na correção do erro. A ação de um controle proporcional e
derivativo pode ser interpretada como um controle proporcional à saída
prevista do sistema (OGATA, 1995, p.184)
4.1.4 Controlador
Então a resposta do PID no domínio do tempo se torna:
( 4.6 )
E finalmente, sua função de transferência:
( 4.7 )
22
Este controlador adiciona um pólo na origem e um par de zeros, que podem ser
reais ou complexos conjugados. No controle de malha fechada, tanto os pólos como
os zeros farão parte da equação característica, o que será demonstrado no capítulo
5.
4.2 Controle PID digital
O controlador PID digital pode ser obtido por meio da discretização
da sua saída u(t) no tempo.
Assumindo os parâmetros:
Para o termo proporcional, podemos utilizar sua variável amostrada
no lugar da contínua. Assim, a equação ( 4.1 ) fica:
( 4.8 )
Para o termo integral, a aproximação pode ser feita pelo método dos
trapézios. Sabemos que a integral definida é o limite das somas de Riemann. A
aproximação por extremo esquerdo para a equação ( 4.2 ) resultaria em:
( 4.9 )
A aproximação por extremo direito nos daria a equação:
A aproximação pela regra do trapézio é a média entre as
aproximações por extremo esquerdo e direito:
( 4.10 )
Para o termo derivativo, podemos fazer a aproximação por
interpolação em dois pontos, e o sinal de controle u(t) fica:
( 4.11 )

23
Por fim, temos a saída do controlador PID digital:
( 4.12 )
Onde é o sinal de saída do controlador. Para utilizar esse
equacionamento na forma da função transferência do controlador, é aplicada a
transformada z em ambos os lados:
Na primeira parte do lado direito da equação, que corresponde ao termo
proporcional, temos:
(4.13)
Para a parte integral, considerando as seguintes relações da transformada Z:
E assumindo que o sistema respeita o princípio da causalidade (para o tempo t=0
não há resposta do erro, então , e tem-se que:

24
( 4.14 )
Para o último termo, o que concerne a parte derivativa:
( 4.15 )
A função de transferência do controlador PID digital é obtida unindo as equações
(4.13, ( 4.14 ) e ( 4.15 ), e isolando o erro E(z):
( 4.16 )
Ou na forma mais comum:
( 4.17 )
Essa função de transferência também pode ser desenvolvida até a forma de
equações polinomiais, o que é mais interessante para quando for usada a alocação
de pólos direta.
Desenvolvendo a equação ( 4.16 ) fazendo o termo o denominador:
(4.18)
Substituindo os coeficientes do polinômio superior por e .
( 4.19 )

25
Sendo os termos e os coeficientes do controlador, com
,
e
.

26
5 Alocação dos pólos
Considerando o sistema da figura 5.1:
Figura 5.1: Sistema em tempo discreto
O processo de discretização envolve também a transformação dos
parâmetros (amortecimento, sobre sinal) de resposta de um sistema. Para isso
vamos analisar os pólos de malha fechada do sistema discreto e a alocação desses
no plano z, de acordo com a escolha dos parâmetros no plano S.
Para alocar os pólos devem-se encontrar os parâmetros para
satisfazer uma equação característica desejada. Assumindo que a planta do
sistema tenha a função de transferência:
( 5.1 )
O polinômio no denominador é dado por:
E o numerador:
E que o controlador PID tenha a função:
( 5.2 )

27
Desse modelo, obtemos a equação de malha fechada e a equação
característica, respectivamente:
( 5.3 )
Tomando como base um sistema de segunda ordem que em tempo
contínuo obedece à equação:
( 5.4 )
No plano Z, segundo Bobal(2005) é adequado que a equação característica tome a
forma:
( 5.5 )
Usando a relação de transformação de z para s:
E considerando e as raízes da equação característica,
podemos obter um sistema de equações substituindo essas raízes em :
( 5.6 )
Sabendo que as raízes e são dadas por: obtemos as
seguintes relações:

28
( 5.7 )
Os polinômios do sistema são:
e
E para o controlador,
e
. Desenvolvendo em termos dos polinômios considerando
um sistema de ordem n=2, temos que D(z) é:
( 5.8 )
Distribuindo-se os polinômios do lado direito, e igualando os
coeficientes de igual potência aos do polinômio obtêm-se as seguintes
relações:
Isolando em função dos termos do controlador, obtemos um sistema
de equações que pode ser traduzido na forma matricial:
( 5.9)
Para o caso específico do controlador ter somente o ganho
proporcional , o que acontecerá para o cálculo do ganho crítico no capítulo 6,
então não é necessário a resolução de um sistema linear.
Nesse caso, o controlador tem a função ( 4.17 ) transformada em:

29
E novamente, desenvolvendo em termos dos polinômios
considerando um sistema de ordem n=2, temos que D(z) é:
( 5.10 )
E o mesmo denominador pode ser também expressado pelo
produto das raízes:
( 5.11 )
Igualando as duas equações e obtendo ambos os termos por
temos a igualdade:
( 5.12)
Com essa relação é possível encontrar o ganho ou o coeficiente , e
ela será usada para calcular o ganho crítico no próximo capítulo.

30
6 Método de Ziegler Nichols Modificado
6.1 Sintonia experimental por Ziegler-Nichols de malha fechada.
O ganho crítico é o ganho necessário e suficiente para o processo
entrar em uma oscilação periódica. A sintonia experimental de parâmetros para um
controlador PID em tempo contínuo esquematizado por Ziegler e Nichols ainda é
usado hoje, na prática industrial. Nesta abordagem, os parâmetros do controlador
são calculados a partir do ganho crítico do sistema, e seu respectivo período de
oscilação critica. Estes parâmetros críticos são obtidos gradualmente aumentando o
ganho do controlador proporcional, até a saída do circuito fechado oscilar a
amplitude constante, ou seja, a malha de controle está no limite da estabilidade.
Neste caso os pólos da malha fechada são colocados no eixo imaginário do plano
complexo. Em seguida, o ganho e o período crítico de oscilações são gravados. Os
parâmetros do PID controlador são determinados por relações pré determinadas.
Figura 6.1: Exemplo de Resposta de um sistema ao ganho critico.
Mas existe uma desvantagem em determinar os parâmetros críticos
dessa forma. O sistema pode ser levado a um estado de instabilidade, e encontrar
esse limite de estabilidade pode ser muito demorado (BOBAL et. al.,2005). O
método modificado para ajustar um controlador PID digital evita esse problema.
6.2 Método de Ziegler Nichols Modificado
15 20 25 30 35 40 45 50
-1
0
1
2
Resposta ao degrau da planta para o ganho crítico
Time (sec)
Am
plit
ude
-2.5 -2 -1.5 -1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
Root Locus
Real Axis
Imagin
ary
Axis
31
No método de Ziegler Nichols modificado, os parâmetros do
controlador são também calculados de acordo com o ganho crítico do processo,
obtido pelo cálculo da com a inserção do controlador na malha fechada do sistema,
e considerando o atraso de tempo inserido com o discretização do sistema.
Os pólos de malha fechada são colocados no eixo imaginário. No
caso do controlador digital, um pólo ou um par de pólos complexos conjugados é
colocado na circunferência unitária.
No caso digital, os valores críticos dependem também do período de
amostragem escolhido , variando com um atraso de tempo acrescentado, como
visto na próxima seção.
6.2.1 Atraso de tempo
Quando um sistema é discretizado, a ele se inclui um atraso de
tempo
, ou seja, metade do período de amostragem.
Esse atraso de tempo acrescenta uma mudança de fase, que varia
proporcionalmente ao aumento da freqüência. Tal variação afeta indiretamente o
ganho crítico, porque altera a freqüência crítica do sistema. Conclui-se então que os
valores do ganho e do período crítico são afetados pelo período de amostragem.
O atraso de tempo pode ser representado por um acréscimo da
expressão , na função e transferência do processo, que no domínio z é
representada por , e d representa o numero de intervalos de atraso de tempo.
6.2.2 Cálculo do Ganho e Período Crítico
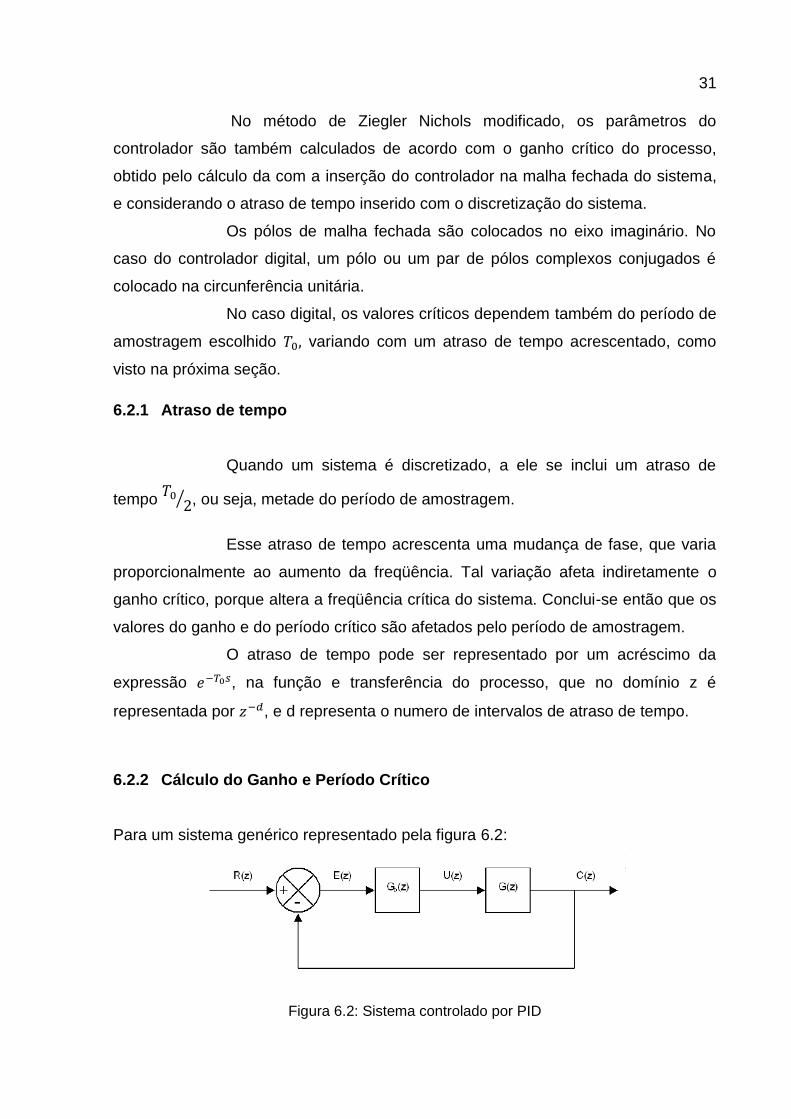
Para um sistema genérico representado pela figura 6.2:
Figura 6.2: Sistema controlado por PID
32
Vamos utilizar o controlador proporcional caracterizado por:
( 6.1 )
Tendo a função de transferência do processo digital:
( 6.2 )
A esta função é acrescentada o atraso de tempo . Então fica:
( 6.3 )
O polinômio no numerador é dado por:
( 6.4 )
E o denominador,
( 6.5 )
Para calcular o ganho crítico, precisamos da função de transferência
de malha fechada do sistema, que será:
( 6.6 )
Desenvolvendo:

33
( 6.7 )
A partir da função de transferência de malha fechada, temos o
polinômio característico:
( 6.8 )
Como dito anteriormente, para garantir a estabilidade do sistema, os
pólos devem estar localizados dentro do círculo unitário no plano z, não importando
seu posicionamento. Para satisfazer o critério de estabilidade crítica, um dos pólos
deve se localizar sobre a circunferência unitária.
Para que um sistema seja marginalmente estável no plano complexo S, o
sistema em malha fechada deverá possuir pelo menos 1 pólo com a parte
real nula e os demais possuírem parte real negativa, logo, para cumprir
este critério no plano Z, pelo menos 1 pólo em e os demais com
(ASTROM; HAGGLUND, 1995, p.79).
O sistema também se torna marginalmente estável se um par de
pólos complexos conjugados for alocado diretamente no círculo unitário. Existem
dois casos possíveis para a alocação dos pólos do polinômio característico.
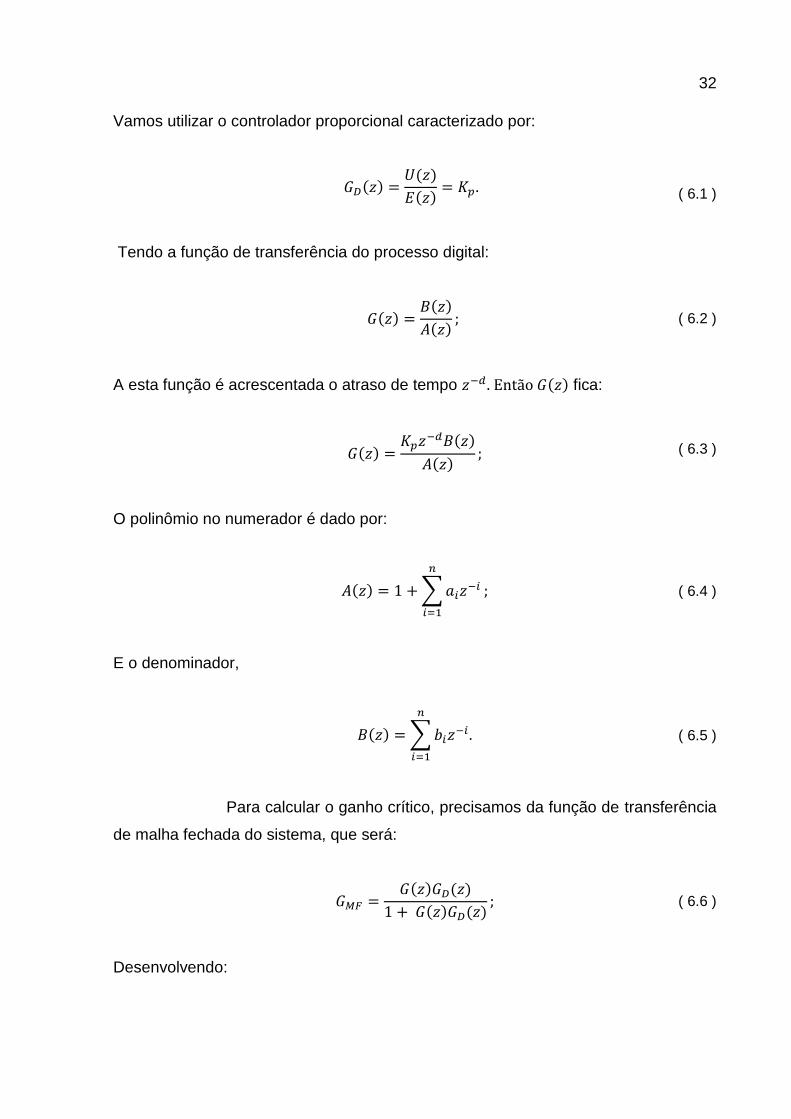
1- Se o polinômio característico tiver um par de pólos complexos
conjugados que podem ser expressos por:
34
( 6.9 )
Figura 6.3: Par de pólos complexos conjugados em
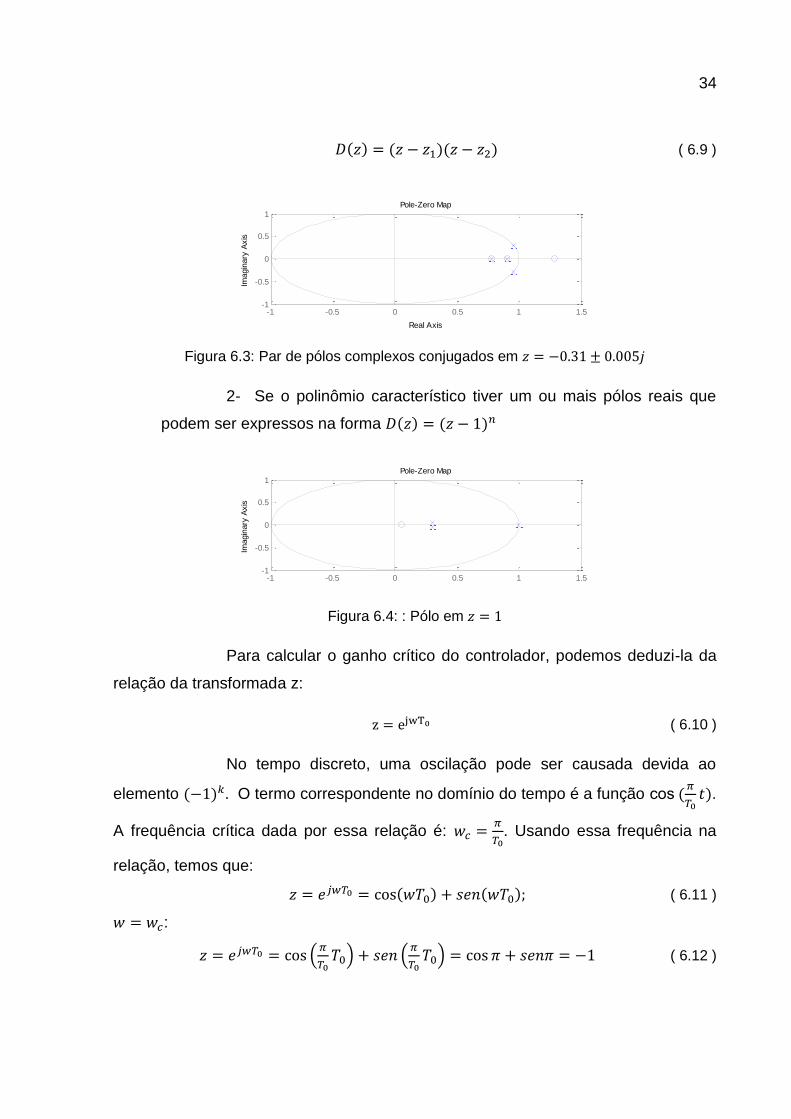
2- Se o polinômio característico tiver um ou mais pólos reais que
podem ser expressos na forma
Figura 6.4: : Pólo em
Para calcular o ganho crítico do controlador, podemos deduzi-la da
relação da transformada z:
( 6.10 )
No tempo discreto, uma oscilação pode ser causada devida ao
elemento O termo correspondente no domínio do tempo é a função cos
.
A frequência crítica dada por essa relação é:
. Usando essa frequência na
relação, temos que:
( 6.11 )
:
( 6.12 )
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-1
0
1
2
Resposta ao degrau da planta para o ganho crítico
Time (sec)
Am
plit
ude
-1 -0.5 0 0.5 1 1.5-1
-0.5
0
0.5
1
Pole-Zero Map
Real Axis
Imagin
ary
Axis
-1 -0.5 0 0.5 1 1.5-1
-0.5
0
0.5
1
Pole-Zero Map
Real Axis
Imagin
ary
Axis

35
Como o ganho pode ser calculado pela relação dada por
Ogata(2003):
, substituindo pelo resultado obtido;
( 6.13 )
Figura 6.5: projeção de um ponto no círculo de raio
1, com coeficientes real e imaginário diferentes de zero.
Olhando para o círculo traçado no plano complexo, observa-se que a
freqüência crítica pode ser medida para um ponto distante do eixo imaginário em
e pode ser deduzida como .
Então, o período crítico é dado por:
( 6.14 )
6.3 Definição dos parâmetros do controlador:
Lembrando que a função de transferência do PID discreto pode ser
dada por:

36
( 6.15 )
Uma vez que foram encontrados os valores de ganho e período
crítico, os parâmetros do PID são calculados pelas relações originalmente dadas por
Ziegler -Nichols:
( 6.16 )
( 6.17 )
( 6.18 )
6.4 Para sistemas de segunda ordem:
Em um sistema de segunda ordem, temos que o polinômio
característico da equação 5.8 tem a forma:
( 6.19 )
Considerando que o polinômio respeite o primeiro caso (eq. 5.10),
sua equação característica corresponderá à forma:
( 6.20 )
Comparando os coeficientes de igual potência dos dois lados da
relação temos que o ganho crítico é:

37
( 6.21 )
( 6.22 )
O valor de pode ser obtido substituindo o valor de encontrado
anteriormente, na relação:
( 6.23 )
Temos:
( 6.24 )
Substituindo o valor encontrado de na equação do período de
oscilação (eq. 3.12), temos que:
Os parâmetros do PID para um sistema de segundo grau são então encontrados de
acordo com as relações em ( 6.16 ), ( 6.17 ) e ( 6.1 ). Esse é o algoritmo para o
método de Ziegler Nichols modificado, com parâmetros de tempo discreto.
( 6.25 )

38
7 Resultados:
Observaremos os resultados do efeito do controlador em dois casos diferentes:
7.1 Para o caso sub-amortecido:
Primeiramente, será analisada a aplicação para um sistema sub-amortecido da
forma:
Que é obtido pela convolução do sistema com o segurador de ordem zero e
aplicando a transformada Z, onde é:
Para esse sistema sub-amortecido, o máximo sobre sinal na saída é
de 66% e o tempo de acomodação é de 20s. O ganho crítico obtido pelos
cálculos é de . A Figura 7.1 mostra o sistema sob esse ganho, em oscilação
crítica. E a Figura 7.2, o pólo em -1, que é o pólo sobre a circunferência unitária que
irá levar o sistema à oscilação crítica.
Figura 7.1: Resposta do sistema para o ganho Kc calculado. (Apêndice 1).
Figura 7.2: root-locus do sistema, com ganho Kc=1,8 para o pólo em -1. (Apêndice 2).
30 40 50 60 70 80 90
-2
0
2
Resposta ao degrau da planta para o ganho crítico
Time (sec)
Am
plit
ude
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.5
0
0.5
1
Root Locus
Real Axis
Imagin
ary
Axis
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.5
0
0.5
1
Root Locus
Eixo Real
Eix
o Im
agin
ario
39
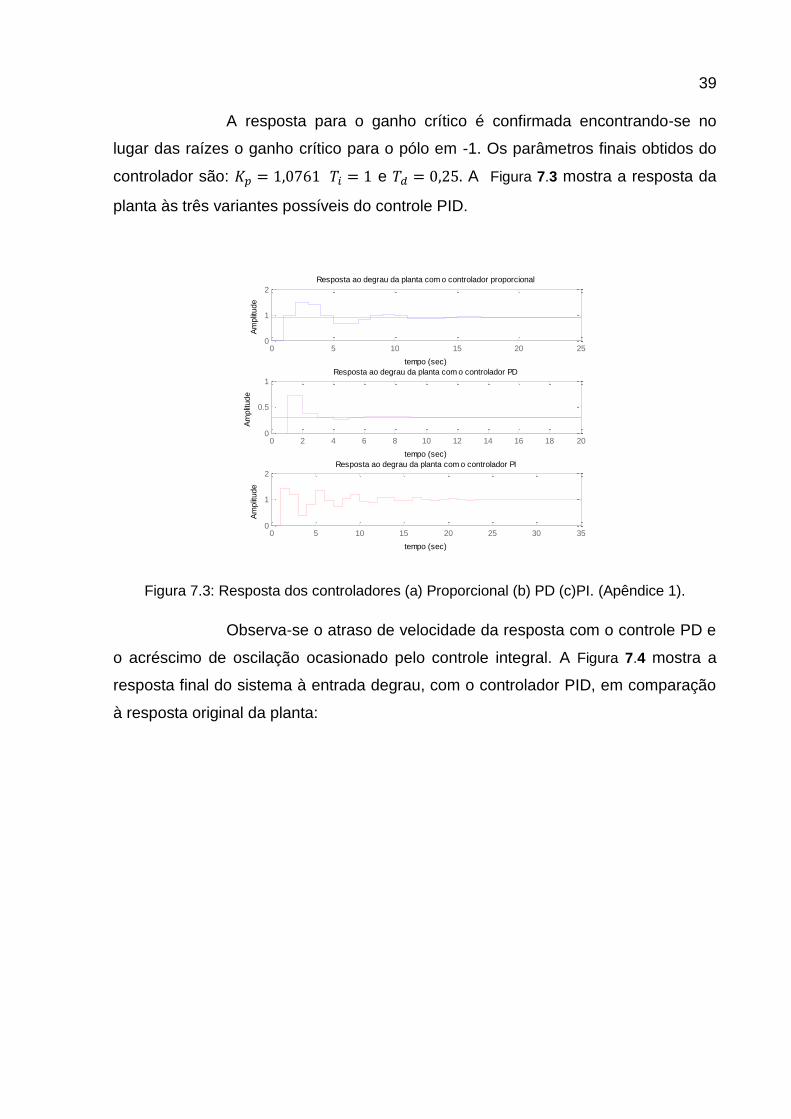
A resposta para o ganho crítico é confirmada encontrando-se no
lugar das raízes o ganho crítico para o pólo em -1. Os parâmetros finais obtidos do
controlador são: e A Figura 7.3 mostra a resposta da
planta às três variantes possíveis do controle PID.
Figura 7.3: Resposta dos controladores (a) Proporcional (b) PD (c)PI. (Apêndice 1).
Observa-se o atraso de velocidade da resposta com o controle PD e
o acréscimo de oscilação ocasionado pelo controle integral. A Figura 7.4 mostra a
resposta final do sistema à entrada degrau, com o controlador PID, em comparação
à resposta original da planta:
0 5 10 15 20 250
1
2
Resposta ao degrau da planta com o controlador proporcional
tempo (sec)
Am
plit
ude
0 2 4 6 8 10 12 14 16 18 200
0.5
1
Resposta ao degrau da planta com o controlador PD
tempo (sec)
Am
plit
ude
0 5 10 15 20 25 30 350
1
2
Resposta ao degrau da planta com o controlador PI
tempo (sec)
Am
plit
ude
40
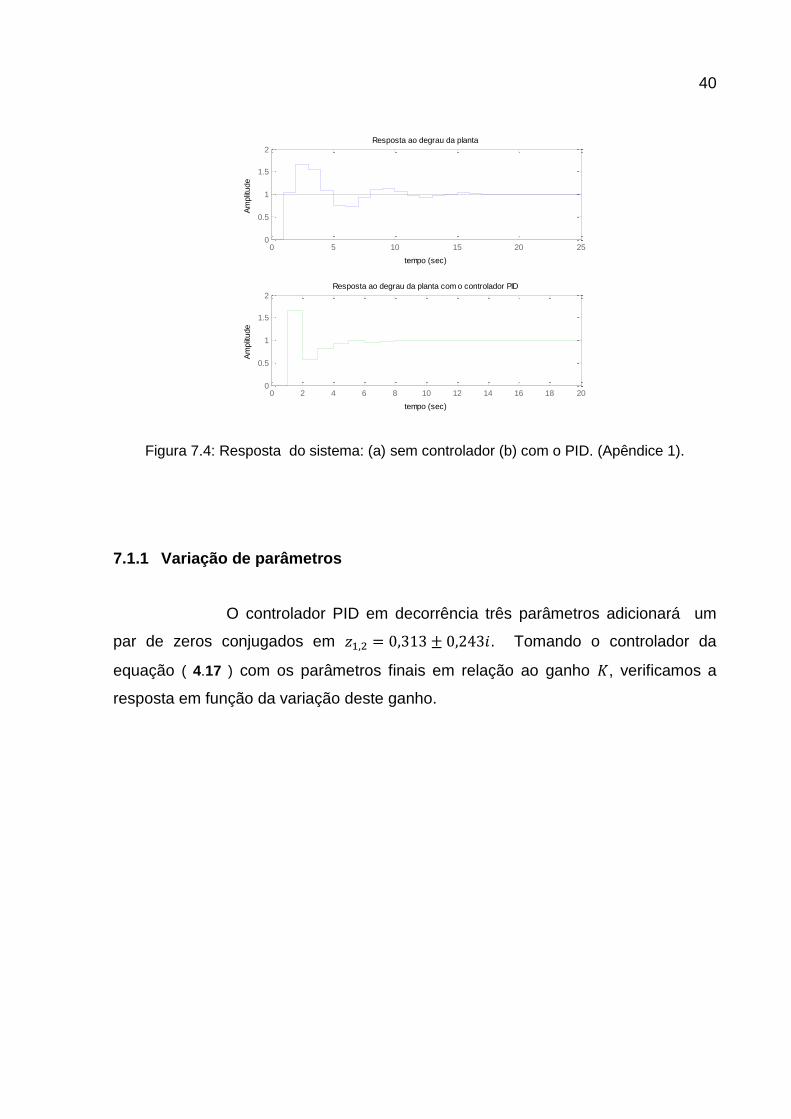
Figura 7.4: Resposta do sistema: (a) sem controlador (b) com o PID. (Apêndice 1).
7.1.1 Variação de parâmetros
O controlador PID em decorrência três parâmetros adicionará um
par de zeros conjugados em . Tomando o controlador da
equação ( 4.17 ) com os parâmetros finais em relação ao ganho , verificamos a
resposta em função da variação deste ganho.
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
Resposta ao degrau da planta com o controlador PID
tempo (sec)
Am
plit
ude
0 5 10 15 20 250
0.5
1
1.5
2
Resposta ao degrau da planta
tempo (sec)
Am
plit
ude
41
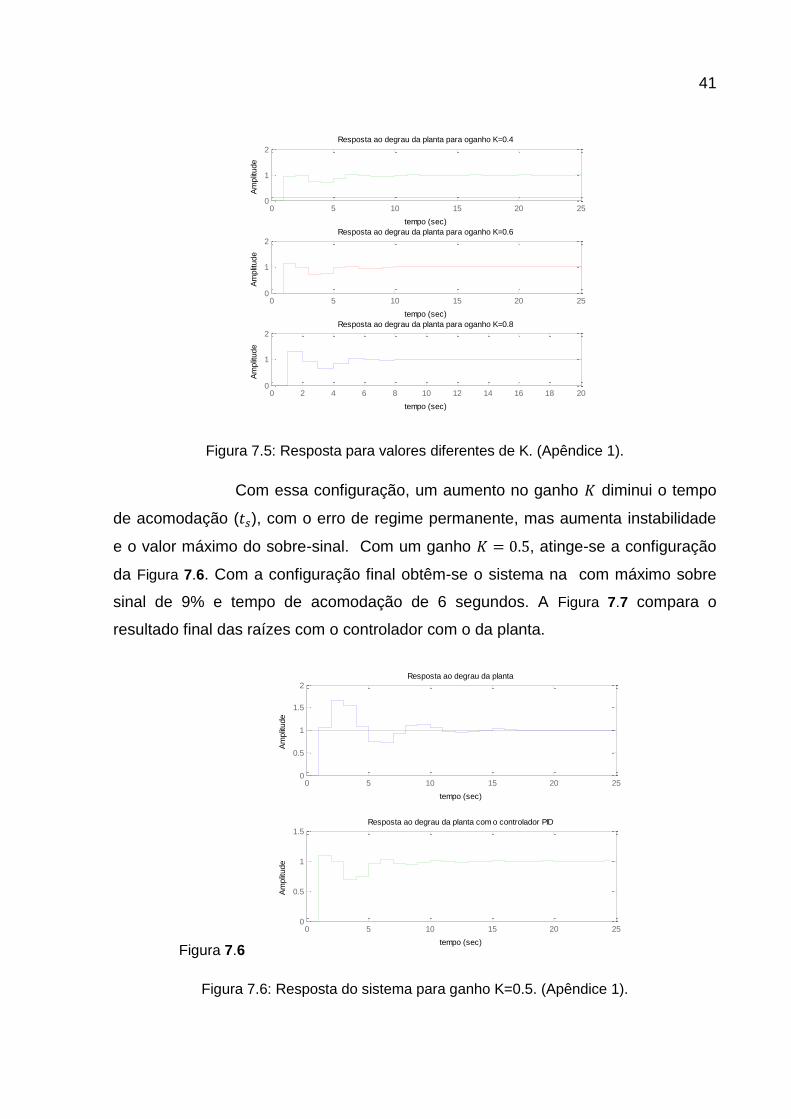
Figura 7.5: Resposta para valores diferentes de K. (Apêndice 1).
Com essa configuração, um aumento no ganho diminui o tempo
de acomodação ( ), com o erro de regime permanente, mas aumenta instabilidade
e o valor máximo do sobre-sinal. Com um ganho , atinge-se a configuração
da Figura 7.6. Com a configuração final obtêm-se o sistema na com máximo sobre
sinal de 9% e tempo de acomodação de 6 segundos. A Figura 7.7 compara o
resultado final das raízes com o controlador com o da planta.
Figura 7.6
Figura 7.6: Resposta do sistema para ganho K=0.5. (Apêndice 1).
0 5 10 15 20 250
1
2
Resposta ao degrau da planta para oganho K=0.4
tempo (sec)
Am
plit
ude
0 5 10 15 20 250
1
2
Resposta ao degrau da planta para oganho K=0.6
tempo (sec)
Am
plit
ude
0 2 4 6 8 10 12 14 16 18 200
1
2
Resposta ao degrau da planta para oganho K=0.8
tempo (sec)
Am
plit
ude
0 5 10 15 20 250
0.5
1
1.5
Resposta ao degrau da planta com o controlador PID
tempo (sec)
Am
plit
ude
0 5 10 15 20 250
0.5
1
1.5
2
Resposta ao degrau da planta
tempo (sec)
Am
plit
ude
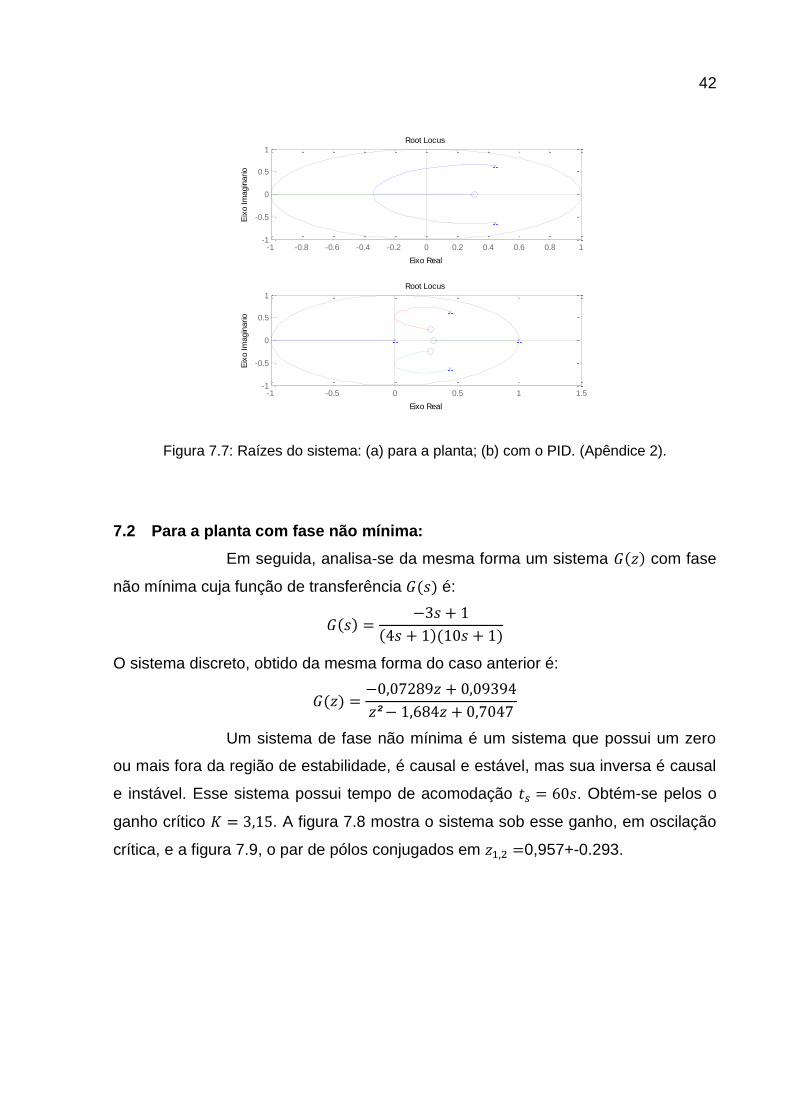
42
Figura 7.7: Raízes do sistema: (a) para a planta; (b) com o PID. (Apêndice 2).
7.2 Para a planta com fase não mínima:
Em seguida, analisa-se da mesma forma um sistema com fase
não mínima cuja função de transferência é:
O sistema discreto, obtido da mesma forma do caso anterior é:
Um sistema de fase não mínima é um sistema que possui um zero
ou mais fora da região de estabilidade, é causal e estável, mas sua inversa é causal
e instável. Esse sistema possui tempo de acomodação . Obtém-se pelos o
ganho crítico . A figura 7.8 mostra o sistema sob esse ganho, em oscilação
crítica, e a figura 7.9, o par de pólos conjugados em 0,957+-0.293.
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.5
0
0.5
1
Root Locus
Eixo Real
Eix
o Im
agin
ario
-1 -0.5 0 0.5 1 1.5-1
-0.5
0
0.5
1
Root Locus
Eixo Real
Eix
o Im
agin
ario

43
Figura 7.8: Resposta do sistema para o ganho Kc calculado. (Apêndice 1).
Figura 7.9: : root-locus do sistema, com ganho Kc=3,15 para o pólo em -1. (Apêndice 2).
Analisando o lugar das raízes esses parâmetros são confirmados. Os parâmetros
finais obtidos do controlador são: e . Assim, obtém-se a
resposta, como visto na figura seguinte:
Figura 7.10: Resposta do sistema: (a) sem controlador (b) com PID. (Apêndice 1).
100 200 300 400 500 600 700
-1
0
1
Resposta ao degrau da planta para o ganho crítico
Time (sec)
Am
plit
ude
-1 -0.5 0 0.5 1 1.5-1
-0.5
0
0.5
1
Pole-Zero Map
Real Axis
Imagin
ary
Axis
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-1
0
1
2
Resposta ao degrau da planta para o ganho crítico
Time (sec)
Am
plit
ude
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5-1
-0.5
0
0.5
1
Root Locus
Eixo Real
Eix
o Im
agin
ario
0 5 10 15 20 25 30 35 40 45 50-1
0
1
2
Resposta ao degrau da planta com o controlador PID
tempo (sec)
Am
plit
ude
0 10 20 30 40 50 60 70-0.5
0
0.5
1
Resposta ao degrau da planta
tempo (sec)
Am
plit
ude

44
Analisando a Figura 7.11 que mostra a resposta do sistema para os controladores
proporcional, PD e PI, verifica-se que o controle PD seria o suficiente para atingir
uma resposta com um tempo de estabilização 5 vezes menor, mas não atinge o
ponto de referência requerido para o valor da resposta em regime permanente.
Figura 7.11: Resposta com os controladores (a) Proporcional (b) PD (c) PI. (Apêndice 1).
7.2.1 Variação de parâmetros
O controlador PID em decorrência três parâmetros adicionará um
par de zeros conjugados em . Tomando novamente o controlador
da equação ( 4.17 ) com a configuração dos pólos e zeros, de forma a ajustar
somente o ganho proporcional e manter a relação encontrada pelo método entre os
parâmetros, observa-se que o aumento contribui com o tempo de acomodação, até
o limiar da instabilidade, e que uma variação apropriada no ganho pode reduzir o
tempo de acomodação até a metade.
0 10 20 30 40 50 60 70-2
0
2
Resposta ao degrau da planta com o controlador proporcional
tempo (sec)
Am
plit
ude
0 5 10 15 20 25-1
0
1
Resposta ao degrau da planta com o controlador PD
tempo (sec)
Am
plit
ude
0 50 100 150-2
0
2
Resposta ao degrau da planta com o controlador PI
tempo (sec)
Am
plit
ude
45
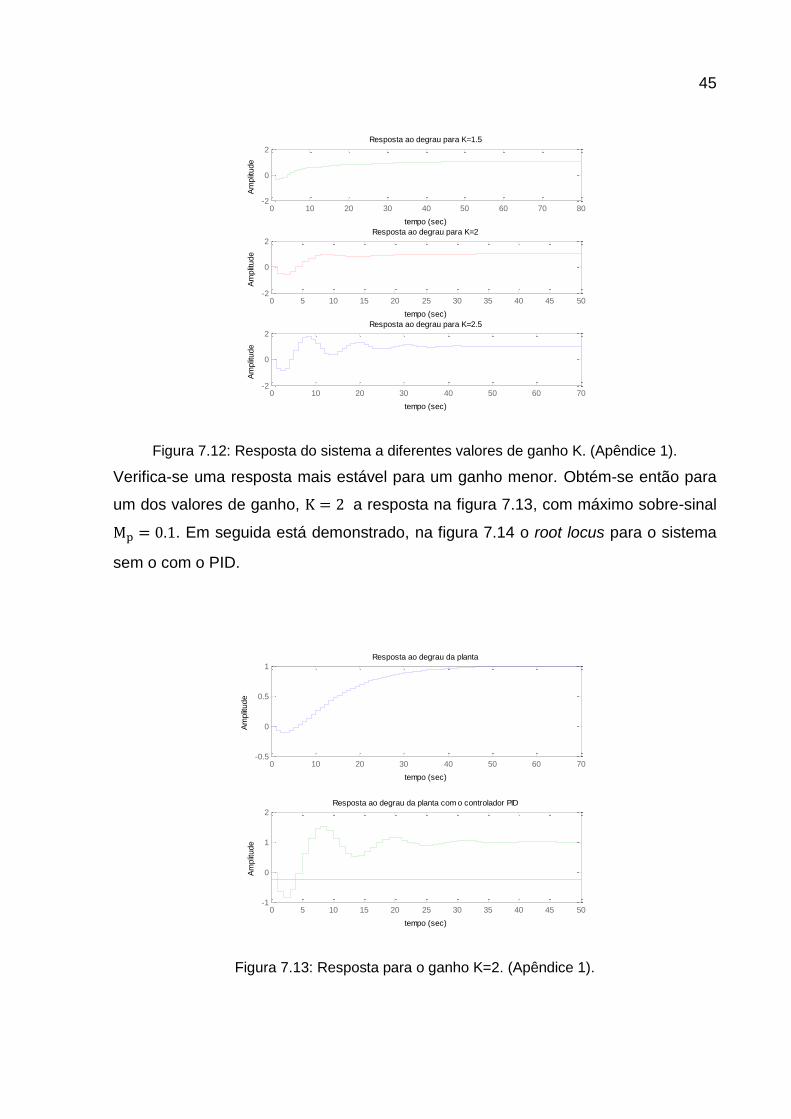
Figura 7.12: Resposta do sistema a diferentes valores de ganho K. (Apêndice 1).
Verifica-se uma resposta mais estável para um ganho menor. Obtém-se então para
um dos valores de ganho, a resposta na figura 7.13, com máximo sobre-sinal
. Em seguida está demonstrado, na figura 7.14 o root locus para o sistema
sem o com o PID.
Figura 7.13: Resposta para o ganho K=2. (Apêndice 1).
0 10 20 30 40 50 60 70 80-2
0
2
Resposta ao degrau para K=1.5
tempo (sec)
Am
plit
ude
0 5 10 15 20 25 30 35 40 45 50-2
0
2
Resposta ao degrau para K=2
tempo (sec)
Am
plit
ude
0 10 20 30 40 50 60 70-2
0
2
Resposta ao degrau para K=2.5
tempo (sec)
Am
plit
ude
0 5 10 15 20 25 30 35 40 45 50-1
0
1
2
Resposta ao degrau da planta com o controlador PID
tempo (sec)
Am
plit
ude
0 10 20 30 40 50 60 70-0.5
0
0.5
1
Resposta ao degrau da planta
tempo (sec)
Am
plit
ude
46
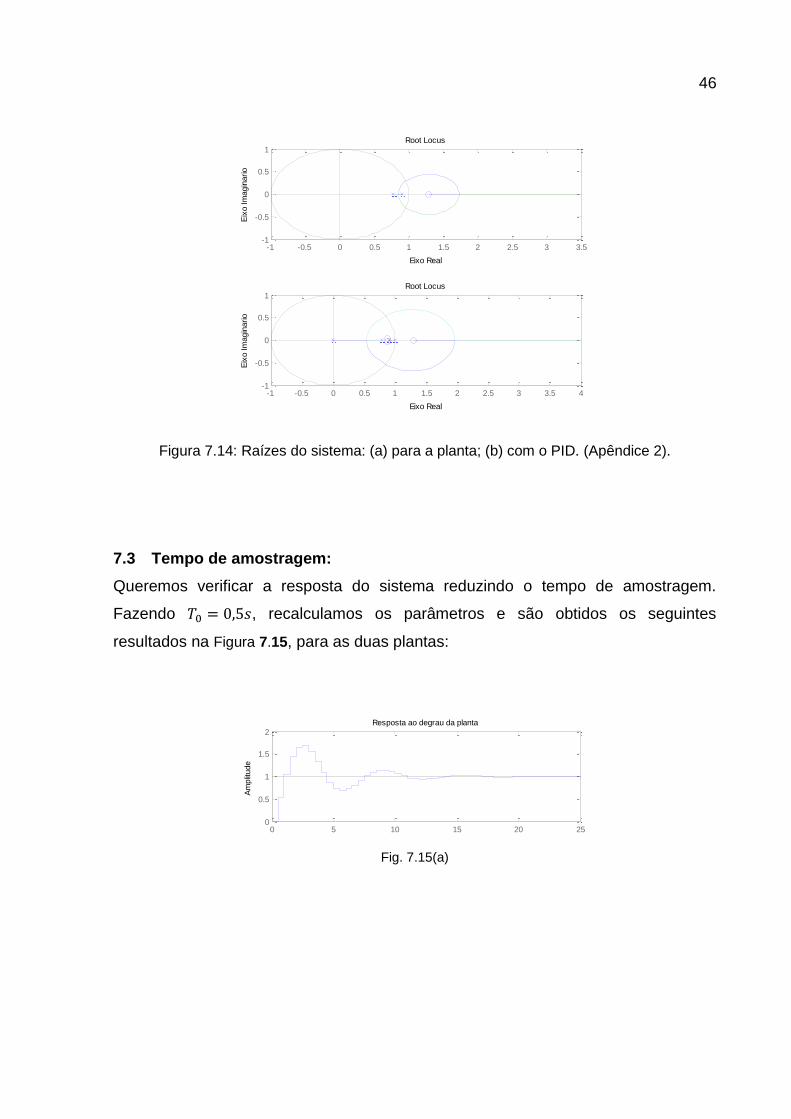
Figura 7.14: Raízes do sistema: (a) para a planta; (b) com o PID. (Apêndice 2).
7.3 Tempo de amostragem:
Queremos verificar a resposta do sistema reduzindo o tempo de amostragem.
Fazendo , recalculamos os parâmetros e são obtidos os seguintes
resultados na Figura 7.15, para as duas plantas:
Fig. 7.15(a)
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5-1
-0.5
0
0.5
1
Root Locus
Eixo Real
Eix
o Im
agin
ario
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4-1
-0.5
0
0.5
1
Root Locus
Eixo Real
Eix
o Im
agin
ario
0 5 10 15 20 250
0.5
1
1.5
2
Resposta ao degrau da planta
Time (sec)
Am
plit
ude

47
Fig. 7.15(b)
Figura 7.15: Resposta do sistema 1 para (a) sem e (b) com controle, para o tempo de
amostragem To=0,5. (Apêndice 1).
Fig. 7.16(a)
0 5 10 15 20 250
0.5
1
Resposta ao degrau da planta para oganho K=0.5
tempo (sec)
Am
plit
ude
0 2 4 6 8 10 12 14 16 180
1
2
Resposta ao degrau da planta para oganho K=1
tempo (sec)
Am
plit
ude
0 2 4 6 8 10 12 14 16 180
1
2
Resposta ao degrau da planta para oganho K=1.5
tempo (sec)
Am
plit
ude
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
Resposta ao degrau da planta
Time (sec)
Am
plit
ude

48
Fig. 7.16(b)
Figura 7.16: Resposta do sistema 1 para (a) sem e (b) com controle, para o tempo de
amostragem To=2s. (Apêndice 1).
Fig. 7.17(a)
0 10 20 30 40 50 60 700
0.5
1
Resposta ao degrau da planta para oganho K=0.5
tempo (sec)
Am
plit
ude
0 5 10 15 20 25 30 35 40 45 500
0.5
1
Resposta ao degrau da planta para oganho K=1
tempo (sec)
Am
plit
ude
0 5 10 15 20 25 30 35 40 45 500
1
2
Resposta ao degrau da planta para oganho K=1.5
tempo (sec)
Am
plit
ude
0 10 20 30 40 50 60 70-0.5
0
0.5
1
Resposta ao degrau da planta
tempo (sec)
Am
plit
ude
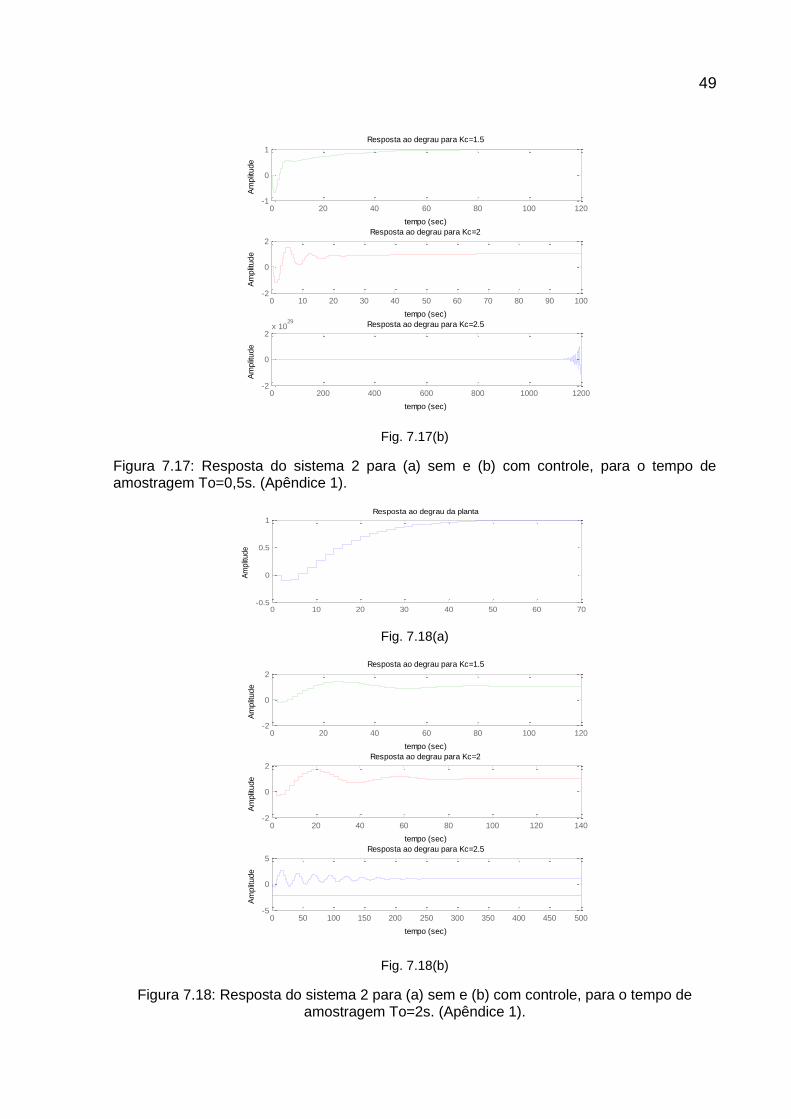
49
Fig. 7.17(b)
Figura 7.17: Resposta do sistema 2 para (a) sem e (b) com controle, para o tempo de amostragem To=0,5s. (Apêndice 1).
Fig. 7.18(a)
Fig. 7.18(b)
Figura 7.18: Resposta do sistema 2 para (a) sem e (b) com controle, para o tempo de amostragem To=2s. (Apêndice 1).
0 20 40 60 80 100 120-1
0
1
Resposta ao degrau para Kc=1.5
tempo (sec)
Am
plit
ude
0 10 20 30 40 50 60 70 80 90 100-2
0
2
Resposta ao degrau para Kc=2
tempo (sec)
Am
plit
ude
0 200 400 600 800 1000 1200-2
0
2x 10
29 Resposta ao degrau para Kc=2.5
tempo (sec)
Am
plit
ude
0 10 20 30 40 50 60 70-0.5
0
0.5
1
Resposta ao degrau da planta
tempo (sec)
Am
plit
ude
0 20 40 60 80 100 120-2
0
2
Resposta ao degrau para Kc=1.5
tempo (sec)
Am
plit
ude
0 20 40 60 80 100 120 140-2
0
2
Resposta ao degrau para Kc=2
tempo (sec)
Am
plit
ude
0 50 100 150 200 250 300 350 400 450 500-5
0
5
Resposta ao degrau para Kc=2.5
tempo (sec)
Am
plit
ude

50
Diminuindo o tempo de amostragem, é possível observar que a
saída do sistema fica mais semelhante à saída em tempo contínuo. A estabilidade é
reduzida, porque para um sistema estabilizado, a parte real dos pólos é negativa, e
com o mapeamento do plano S ao plano z, verifica-se,que para o caso de σ ser
negativo, diminuir o tempo de amostragem aproxima o referido pólo da
circunferência unitária, tornando o sistema mais próximo da instabilidade. A maior
contribuição da ação derivativa atua também nesse contexto, o que faz, para o
primeiro caso, que a resposta seja mais rápida. Aumentando o tempo de
amostragem para o dobro do escolhido inicialmente, têm-se as respostas vistas nas
figuras 7.18(b) e 7.19(b).
(Apêndice 1).
Fig. 7.18(a)
Fig. 7.18(b)
Figura 7.18: Resposta do sistema 2 para (a) sem e (b) com controle, para
o tempo de amostragem To=2s. (Apêndice 1).
0 10 20 30 40 50 60 70-0.5
0
0.5
1
Resposta ao degrau da planta
tempo (sec)
Am
plit
ude
0 20 40 60 80 100 120-2
0
2
Resposta ao degrau para Kc=1.5
tempo (sec)
Am
plit
ude
0 20 40 60 80 100 120 140-2
0
2
Resposta ao degrau para Kc=2
tempo (sec)
Am
plit
ude
0 50 100 150 200 250 300 350 400 450 500-5
0
5
Resposta ao degrau para Kc=2.5
tempo (sec)
Am
plit
ude
51
Para ambos os casos, vê-se que também não traz uma
resposta muito viável, já que o tempo de estabilização aumenta consideravelmente.
7.4 Discussão dos resultados
Neste trabalho, foram analisados os procedimentos do método de
Ziegler Nichols modificado, para o calculo dos parâmetros do controlador PID digital
auto-ajustável. Primeiramente é determinada a forma com que os pólos, ou o pólo
que leva à oscilação crítica será colocado, depois, se determinam o ganho e o
período referentes à condição.
É demonstrado que para esses procedimentos se deve levar em
conta o processo de amostragem, cuja influência é principalmente expressada em
termos do período de amostragem . A amostragem inclui um atraso no sistema,
além de influenciar diretamente nos parâmetros do controlador. Para os casos
analisados o controlador mostrou uma primeira resposta satisfatória na melhora do
tempo de estabilização, mas se o sistema for exigente em relação ao sobre-sinal, é
necessária uma variação no ganho.

52
8 Conclusões:
Este trabalho tinha como objetivo principal a análise do método e
suas alterações em relação a um sistema discreto, que foi concluído. Os resultados
da análise apresentaram que controlador traz uma reposta satisfatória em relação à
melhora no tempo de estabilização, mas agrega menos vantagem quanto ao valor
de sobre-sinal.
Uma mudança em interfere na proporção da contribuição dos
ganhos no controlador. Segundo Kim (2005) a razão entre o termo proporcional e
integral precisa ser no mínimo igual a quatro para um bom desempenho do sistema,
e o mesmo vale para o ganho derivativo, porque ele tende a afetar o sobre-sinal.
Aumentando-se o período de amostragem, o termo integral tem uma maior
contribuição, e o ganho derivativo por sua vez diminui. Como o ganho derivativo
possui maior interferência inicial no sobre-sinal, um aumento no período de
amostragem tende a mostrar um sistema mais estável, mas que perde velocidade.
Mas um aumento muito grande também pode causar instabilidade no sistema, visto
que existe um limiar para o ganho integral. Diminuindo-se o tempo de amostragem,
o inverso ocorre, e é possível perceber que a instabilidade é atingida mais
rapidamente, ou seja, para um menor aumento no ganho total.
Como possível trabalho futuro pode-se apontar a aplicação dessa
parametrização em um controlador digital auto-ajustável, por meio de um algoritmo
recursivo, e análise não somente da resposta do sistema, mas da saída do
controlador sobre o sistema.

53
9 Referências
AGUIRRE, L.A. et al. Enciclopédia de Automatica. 2 v. São Paulo. Blucher, 2007.
415 p.
ASSUNÇÃO, E. Controle Digital.Ilha solteira. 143 P.
ASTROM, K. J; HAGGLUND, T. PID controllers: theory, design, and tuning. 2nd ed.
Durham. Instrument Society of America, 1995. 343 p.
BOBAL, V.; BÖHM, J.; FESSL, J.; MACHACEK, J. Digital Self-tuning Controllers.
London. Springer, 2005. 317 p.
Donadon, A.V, Controle de Sistemas em Tempo Discreto, 2008. 120p.
KIM, K.; SHAEFER, R.C. Tuning a PID Controller for a Digital Excitation Control
System. IEEE Transactions on Industry Applications, v. 41, n. 2, p. 485-492, mar/apr
2005.
KNOSPE, C. PID Control. IEEE Control Systems Magazine. Feb 2006 p. 30-31.
NISE, N.S. Control Systems Engineering. 5. Ed. Pomona. John Wiley & Sons, Inc,
2006. 926 p.
OGATA, K. Discrete-Time Control Systems. 2nd ed. Minnesota. Prentice Hall Inc,
1995. 744p.
OGATA, K. Engenharia de Controle Moderno. 4 ed. São Paulo. Pearson, 2003. 788
p.
SILVA, G. J.; BHATTACHARYYA, S. P.; DATTA, A. New Results on the Synthesis of
PID Controllers. IEEE Transactions on Automatic Control, v. 47, n. 2, p. 241-252, feb.
2002.

54
Schniter, P. Zero order hold, Disponivel em: http://cnx.org/content/m10402/latest/.
Acesso em: 19 de out. 2011.
VISIOLI, A. Practical PID Control. Springer, 2006. 310 p.

55
10 Apêndices
10.1 Anexo A –Simulação Planta
clear all
close all
n=[1 1];
d=[1 0.5 1];
f=tf(n,d);
%período de amostragem
T0=1;
Gdma=c2d(f,T0);
%malha fechada c/ controlador proporcional:
Gdmaf=Gdma/(1+Gdma);
%coeficientes da planta digital
a1= -0.8828;
a2= 0.6065;
b1= 1.056;
b2=-0.3319;
figure
grid
subplot(2,1,1)
step(Gdma)
title('Resposta ao degrau da planta')
%Calculo dos parametros criticos do sistema
Kp1=(1-a2)/b2; %condição 1 ganho critico
Kp2=(a1-a2-1)/(b2-b1);
bb=b1*Kp1+a1; cc=b2*Kp1+a2;
dd=(bb*bb-4*cc)*10;
alfa=-bb/2;
56
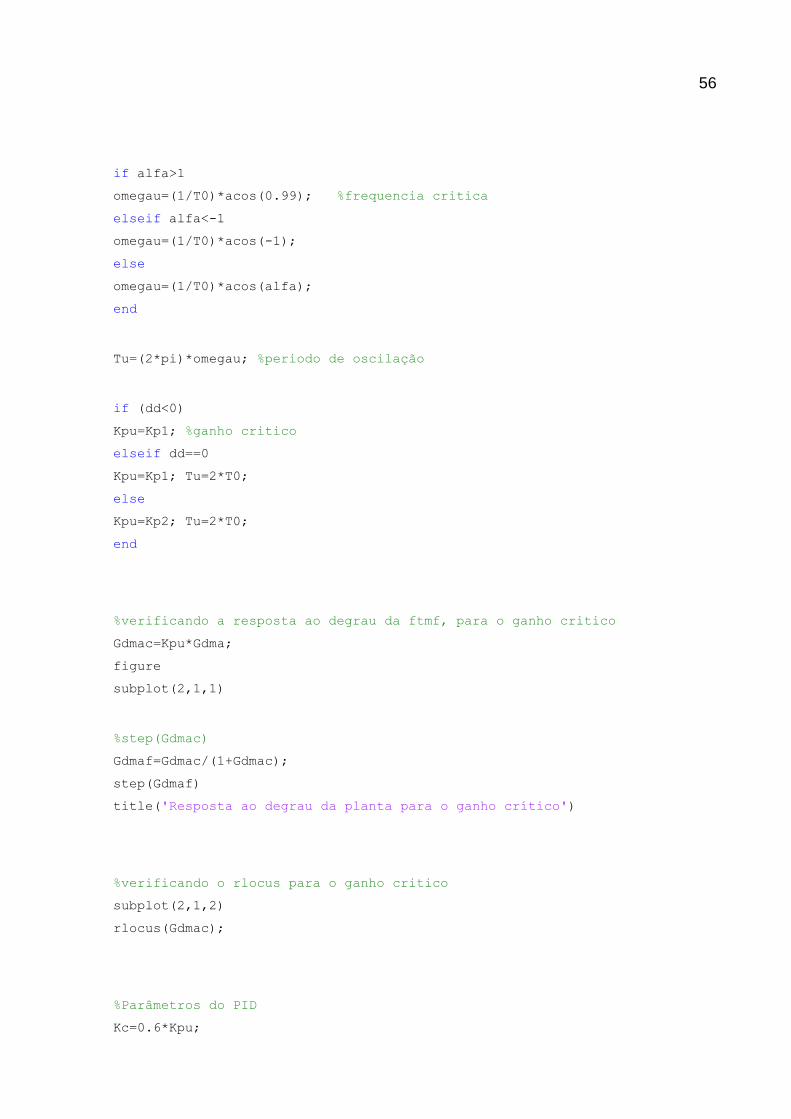
if alfa>1
omegau=(1/T0)*acos(0.99); %frequencia critica
elseif alfa<-1
omegau=(1/T0)*acos(-1);
else
omegau=(1/T0)*acos(alfa);
end
Tu=(2*pi)*omegau; %periodo de oscilação
if (dd<0)
Kpu=Kp1; %ganho critico
elseif dd==0
Kpu=Kp1; Tu=2*T0;
else
Kpu=Kp2; Tu=2*T0;
end
%verificando a resposta ao degrau da ftmf, para o ganho critico
Gdmac=Kpu*Gdma;
figure
subplot(2,1,1)
%step(Gdmac)
Gdmaf=Gdmac/(1+Gdmac);
step(Gdmaf)
title('Resposta ao degrau da planta para o ganho crítico')
%verificando o rlocus para o ganho critico
subplot(2,1,2)
rlocus(Gdmac);
%Parâmetros do PID
Kc=0.6*Kpu;
57 Ti=0.5*Tu;
Td=0.125*Tu;
%controlador
z=tf('z',T0);
Dz1=(1); Dz2=(T0/(2*Ti))*((1+z^-1)/(1-z^-1));
Dz3=(Td*(1-z^-1)/T0);
%controlador em função de Kc
Gd=Kc*(Dz1+Dz2+Dz3);
figure
rlocus(Gd)
%planta com o controlador proporcional
GdGz=Gdma*Kc;
figure
subplot(3,1,1)
step(GdGz)
title('Resposta ao degrau da planta com o controlador proporcional')
%planta com o controlador proporcional e derivativo
Gpd=Kc*(Dz1+Dz3);
GdGpd=(Gdma*Gpd)/(1+Gdma*Gpd);
subplot(3,1,2)
step(GdGpd,'m')
title('Resposta ao degrau da planta com o controlador PD')
%planta com o controlador proporcional e integral
Gpi=Kc*(Dz1+Dz2);
GdGpi=(Gdma*Gpi)/(1+Gdma*Gpi);
subplot(3,1,3)
step(GdGpi,'r')
title('Resposta ao degrau da planta com o controlador PI')
%planta com o pid:
GdGpid=(Gdma*Gd)/(1+Gdma*Gd);
figure
subplot(2,1,1);
step(GdGpid,'m')
title('Resposta ao degrau da planta com o controlador PID')

58
Gdpidn=(Gdma*Gd);
subplot(2,1,2)
rlocus(Gdpidn)
%Inserindo outro valor de Kc determinado pelo root locus
%Kc=1.43;
Gd=Kc*(Dz1+Dz2+Dz3);
%plotar a duas plantas com o e sem pid:
GdGpid=(Gdma*Gd)/(1+Gdma*Gd); figure; subplot(2,1,2);
step(GdGpid,'g')
title('Resposta ao degrau da planta com o controlador PID');
subplot(2,1,1); step(Gdma);
title('Resposta ao degrau da planta')
%plotar a duas plantas com o pid e com ganhos diferentes:
Kc=;
Gd=Kc*(Dz1+Dz2+Dz3);
GdGpid2=(Gdma*Gd)/(1+Gdma*Gd); figure; grid; subplot(2,1,2);
step(GdGpid2,'g')
title('Resposta ao degrau da planta com o controlador PID');
subplot(2,1,1); step(Gdma);
title('Resposta ao degrau da planta')
figure
subplot(2,1,2)
rlocus(GdGpid)
subplot(2,1,1)

59 rlocus(Gdpidn)
Kc=;
Gd=Kc*(Dz1+Dz2+Dz3);
GdGpid=(Gdma*Gd)/(1+Gdma*Gd); figure; grid; subplot(3,1,1);
step(GdGpid,'g')
title('Resposta ao degrau para Kc=X')
Kc=;
Gd=Kc*(Dz1+Dz2+Dz3);
GdGpid=(Gdma*Gd)/(1+Gdma*Gd);
subplot(3,1,2)
step(GdGpid,'r')
title('Resposta ao degrau para Kc=Y')
Kc=;
Gd=Kc*(Dz1+Dz2+Dz3);
GdGpid=(Gdma*Gd)/(1+Gdma*Gd);
subplot(3,1,3)
step(GdGpid)
title('Resposta ao degrau para Kc=W')
Gdf=Gdma*Gd;
figure
subplot(2,1,1)
rlocus(Gdma)
subplot(2,1,2)
rlocus(Gdf)
10.2 Anexo B –Verificação dos parâmetros
clear all
n=[ ]; %parãmetros a preencher
d=conv([],[]); %parãmetros a preencher
f=tf(n,d);
%período de amostragem
T0=; %parãmetros a preencher
60 Gdma=c2d(f,T0);
%coeficientes da planta digital
a1=; %parãmetros a preencher
a2=
b1=;
b2=;
figure %figura1
subplot(2,1,1)
step(Gdma)
title('Resposta ao degrau da planta')
Kp1=(1-a2)/b2;
Kp2=(a1-a2-1)/(b2-b1);
bb=b1*Kp1+a1;
cc=b2*Kp1+a2;
dd=(bb*bb-4*cc)*10;
alfa=-bb/2;
alfagrau=57.29577*alfa;
if alfa>1
omegau=(1/T0)*acos(0.99); %frequencia critica
elseif alfa<-1
omegau=(1/T0)*acos(-1);
else
omegau=abs((1/T0)*acos(alfagrau));
end
Tu=(2*pi)*omegau; %periodo de oscilação
if (dd<0)
Kpu=Kp1; %ganho critico
elseif dd==0
61 Kpu=Kp1; Tu=2*T0;
else
Kpu=Kp2; Tu=2*T0;
end
%verificando a resposta ao degrau da ftmf, para o ganho critico
Gdmac=Kpu*Gdma;
figure
Gdmaf=Gdmac/(1+Gdmac);
step(Gdmaf)
title('Resposta ao degrau da planta para o ganho crítico')
%ver o os polos e zeros separadamente
subplot(2,1,2)
rlocus(Gdma);
[K,POLES]=rlocfind(Gdma);
%verificando lugar das raízes para o ganho critico
subplot(2,1,2)
rlocus(Gdma);
[K,POLES]=rlocfind(Gdma);
Related Documents