Calculul dinamic al căii* 1. Introducere Privitor la calculul suprastructurii căii, majoritatea problemelor care apar sunt legate mai mult sau mai puţin de calculul dinamic al căii. Interacţiunea dinamică dintre vehicul şi cale în plan vertical poate fi descrisă cu o acurateţe destul de mare utilizând modele matematice. n figura de mai jos este prezentat un astfel de model. !ig. " #odelul dinamic al interacţiunii vehicul $ cale %omportamentul dinamic acoperă o gamă destul de largă de frecvenţe, de la &.' $ " (z pentru acceleraţii laterale şi verticale ale vehiculului până la ) *(z pentru efectele imperfecţiunilor geometrice ale căii sau bandajului roţii. +ibraţiile provenind din interacţiunea roată $ cale sunt preluate în primul rând de sistemul de suspensie dintre roată şi boghiu, numit suspensie primară. +ibraţiile de frecvenţă mai joasă sunt atenuate de suspensia boghiu $ corpul materialul ui rulant, numită suspe nsie secu ndară . imilar se poat e aplica acest principiu şi în cazul suprastructurii căii- suspensia primară este reprezentată de prinderea şină $ traversă, iar cea secundară de însăşi prisma de balast. %alculul dinamic al căii este o problemă compleă şi greu accesibilă. %ele mai multe analize sunt bazate pe considerente cvasi/statice. ituaţiile dinamice reale sunt aproimate în moduri pragmatice, prin măsurători. 2. Principii dinamice 0s pe ct el e di na mi ce al e intera cţ iunii di nt re încă rc ar e ş i struct ur ă pl eacă de la considerentul variaţiei încărcărilor în timp. #odul în care acestea variază determină caracterul acţiunii dinamice. tructurile sunt caracterizate de răspunsul lor în frecvenţă, guvernat de 1 parametrii- ma sa, amorti zar ea şi rig iditatea. 0ce şti a det ermină frecve nţ a nat ura l ă a une i struct uri sa u modurile normale de vibraţie ale acesteia. 2acă frecvenţele din încărcare sunt apropiate de frecvenţa proprie a structurii, pot apărea mari amplificaţii dinamice, fenomen cunoscut sub numele de rezonanţă. %ompor ta rea di na mi că es te gu ve rn at ă de le ge a ( ) dt v m d ! ⋅ = . 2acă masa m est e constantă, relaţia devine a m ! ⋅ = / legea lui 3e4ton. %el mai simplu model dinamic este cel prin care masa m este legată de teren printr/un resort de constantă elastică *, oscilaţiile fiind caracterizate de amortizarea c. istemul are un singur grad dinamic de libertate 526.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 1/22
Calculul dinamic al căii*
1. Introducere
Privitor la calculul suprastructurii căii, majoritatea problemelor care apar sunt legate mai
mult sau mai puţin de calculul dinamic al căii. Interacţiunea dinamică dintre vehicul şi cale în plan vertical poate fi descrisă cu o acurateţe destul de mare utilizând modele matematice. nfigura de mai jos este prezentat un astfel de model.
!ig. " #odelul dinamic al interacţiunii vehicul $ cale
%omportamentul dinamic acoperă o gamă destul de largă de frecvenţe, de la &.' $ " (z pentru acceleraţii laterale şi verticale ale vehiculului până la ) *(z pentru efecteleimperfecţiunilor geometrice ale căii sau bandajului roţii. +ibraţiile provenind din interacţiunearoată $ cale sunt preluate în primul rând de sistemul de suspensie dintre roată şi boghiu, numitsuspensie primară. +ibraţiile de frecvenţă mai joasă sunt atenuate de suspensia boghiu $ corpulmaterialului rulant, numită suspensie secundară. imilar se poate aplica acest principiu şi în
cazul suprastructurii căii- suspensia primară este reprezentată de prinderea şină $ traversă, iar ceasecundară de însăşi prisma de balast.
%alculul dinamic al căii este o problemă compleă şi greu accesibilă. %ele mai multeanalize sunt bazate pe considerente cvasi/statice. ituaţiile dinamice reale sunt aproimate înmoduri pragmatice, prin măsurători.
2. Principii dinamice
0spectele dinamice ale interacţiunii dintre încărcare şi structură pleacă de laconsiderentul variaţiei încărcărilor în timp. #odul în care acestea variază determină caracterulacţiunii dinamice.
tructurile sunt caracterizate de răspunsul lor în frecvenţă, guvernat de 1 parametrii-masa, amortizarea şi rigiditatea. 0ceştia determină frecvenţa naturală a unei structuri saumodurile normale de vibraţie ale acesteia. 2acă frecvenţele din încărcare sunt apropiate defrecvenţa proprie a structurii, pot apărea mari amplificaţii dinamice, fenomen cunoscut subnumele de rezonanţă.
%omportarea dinamică este guvernată de legea( )dt
vmd!
⋅= . 2acă masa m este
constantă, relaţia devine am! ⋅= / legea lui 3e4ton.%el mai simplu model dinamic este cel prin care masa m este legată de teren printr/un
resort de constantă elastică *, oscilaţiile fiind caracterizate de amortizarea c. istemul are un
singur grad dinamic de libertate 526.

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 2/22
!ig. ) istem cu " 526
7cuaţia diferenţială a deplasării pe verticală 4 este-
( )t!4* 4c4m...
=⋅+⋅+⋅ ,
cu soluţia ( ) ( ) ( )
∫ ττ−⋅τ=
t
&
dth!t4 .
Funcţia de răspuns în frecvenţă
2in relaţia de calcul a 48t9 se desprinde concluzia că răspunsul în stare de repaus înfuncţie de timp este dificil de calculat. : metodă mai potrivită pentru a efectua acest calcul esteutilizând transformata !ourier în calculul funcţiei de răspuns în frecvenţă (8f9 8funcţia detransfer a sistemului9.
0ceastă funcţie descrie relaţia dintre solicitare şi răspuns în domeniul frecvenţelor. %ândsolicitarea ca funcţie de timp este cunoscută, transformata !ourier conduce la soluţia pentrureacţiune, prin înmulţirea forţei transformate cu funcţia de transfer. n domeniul frecvenţelor,transformata !ourier a deplasării 489 este-
9f 8!9f 8(9f 8; ⋅=
Pentru un impuls unitate !8t9<=8t9 aplicat sistemului cu "526, răspunsul în frecvenţă aresoluţia-
n
)
n
)
f
f )i
f
f "
* "
9f 8!
9f 8;9f 8(
⋅ζ⋅+−==
,
unde-
m
*
)
"f n π= / frecvenţa proprie neamortizată>
*m)
c=ζ / rata amortizării.
Pentru f<& se obţine (8&9 < "?*.criind relaţia de calcul pentru (8f9 într/un alt mod se pot obţine valorile pentru modulul
8valoarea absolută9 şi pentru argumentul 8unghiul9 funcţiei, după cum urmează-
( )f ie9f 8(9f 8( φ−⋅= ,
unde-

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 3/22
)
n
)
)
)
)
n
)
f
f @
f
f "
* "9f 8(
⋅ζ+
−
= / modulul funcţiei>
( )
−
ζ−=φ
)
n
)
n
f
f "
f
f )
tanaf / unghiul.
!uncţia de răspuns în frecvenţă se mai numeşte şi funcţie de fleibilitate.7emplul din figura 1 ilustrează rezultatele obţinute pentru-
.m? 3s)"&."c
,m? 3s&"&."c
,m? 3&"&.@*
,*g")&m
'
)
@
"
A
=
=
=
=
2acă fBBf n, atunci C(8f9C?(8&9 tinde la "?8f?f n9D, care caracterizează un sistem de gradul ).Pentru frecvenţe mari, faza E se apropie de F rad.
n cazul interacţiunii vehicul $ cale, impulsurile sunt induse de neregularităţile interfeţei bandaj $ şină. n forma cea mai simplificată, acestea pot fi considerate ca deplasări forţate, după principiul ilustrat în figură.
!ig. 1 2eplasări forţate
n acest caz, ecuaţia diferenţială a deplasării 4 devine
G* Gc4* 4c4m....
⋅+⋅=⋅+⋅+⋅ , sau.....
Gmz* zczm ⋅−=⋅+⋅+⋅G $ deplasarea şinei pe verticală.
n figura următoare este prezentat un grafic al transferului de vibraţie dintr/o încărcare periodică spre baza sistemului cu " 526. 0cest studiu este util în cazul rezolvării problemelorlegate de calea în tunele sau zone dens populate. %u cât este mai redusă frecvenţa proprie asistemului cu " 526 cu atâ sunt mai bine filtrate componentele frecvenţei de ecitaţie.
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 4/22
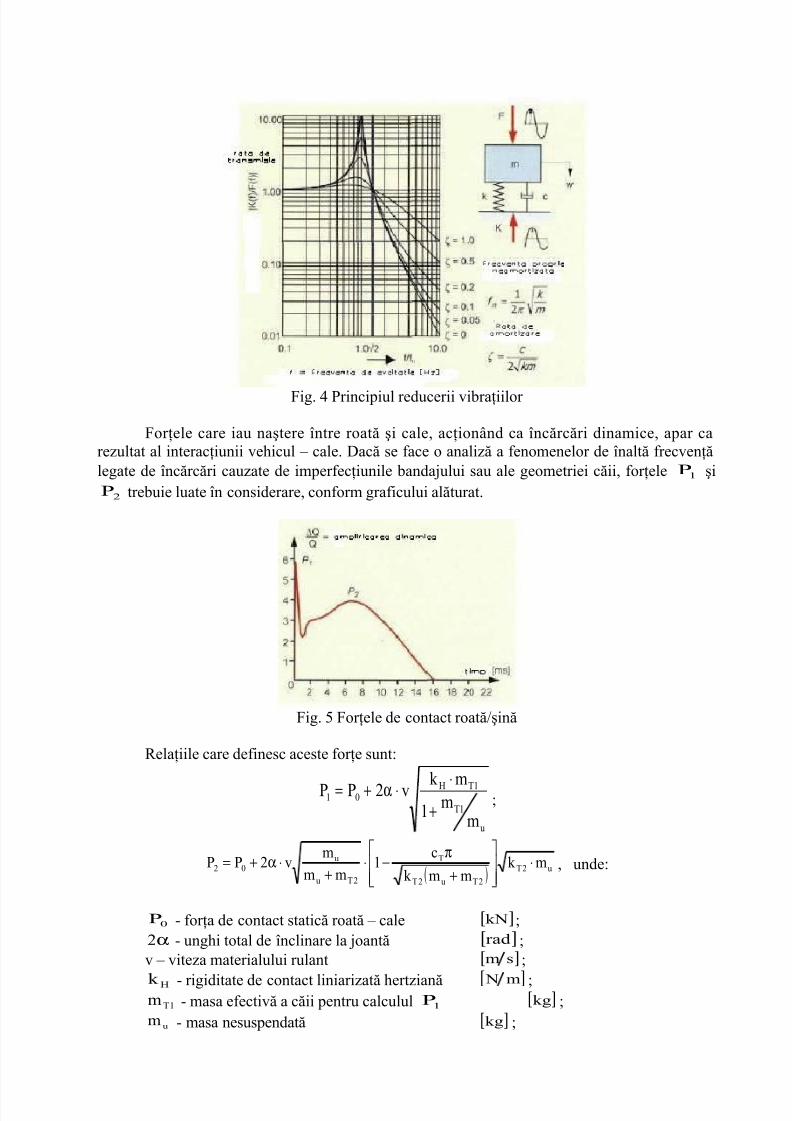
!ig. @ Principiul reducerii vibraţiilor
!orţele care iau naştere între roată şi cale, acţionând ca încărcări dinamice, apar carezultat al interacţiunii vehicul $ cale. 2acă se face o analiză a fenomenelor de înaltă frecvenţălegate de încărcări cauzate de imperfecţiunile bandajului sau ale geometriei căii, forţele "P şi
)P trebuie luate în considerare, conform graficului alăturat.
!ig. ' !orţele de contact roată?şină
Helaţiile care definesc aceste forţe sunt-
u
"I
"I(&"
mm
"m* v)PP
+⋅⋅α+= >
( ) u)I
)Iu)I
I
)Iu
u
&) m*
mm*
c"
mm
mv)PP ⋅
+
π−⋅
+⋅α+= , unde-
&P / forţa de contact statică roată $ cale [ ]*3 >α) / unghi total de înclinare la joantă [ ]rad >
v $ viteza materialului rulant [ ]sm >
(* / rigiditate de contact liniarizată hertziană [ ]m 3 >"m / masa efectivă a căii pentru calculul "P [ ]*g >
um / masa nesuspendată [ ]*g >

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 5/22
)m / masa echivalentă a căii pentru calculul )P [ ]*g >
)* / rigiditate echivalentă a căii pentru calculul )P [ ]m 3 >
c / amortizare echivalentă a căii pentru calculul )P [ ]m 3s >
: formulă simplificată este dată de 0lias-
u& m* v)PP ⋅⋅α⋅λ+= , unde- / factor funcţie de amortizare, ≤ ">
* $ rigiditatea căii [ ]m 3 .
Sursele solicitării de excitaţie a căii
7citaţiile provenind din forţele induse căii sunt condensate în figura.....-
Pentru unde scurte, de ordinul centimetrilor, principalii factori de ecitaţie sunt-ondulările căii, neregularităţile bandajelor roţilor şi imperfecţiunile sudurii căii.
Pentru frecvenţe înalte, de până la )&&& (z, resortul (ertz dintre cale şi vehicul trebuieluat în considerare.
Imperfecţiunile căii au lungimi de undă în jurul valorii de 1 metri. !recvenţele proprii ale boghiurilor sunt de )&/)' (z, iar ale resortului de &.A/' (z, influenţând în principal prisma de balast.
3. odelarea căii
ipul interacţiunii determină într/o mare măsură structura modelului de calcul şi graduldetalierii. %alea are o importanţă majoră în cazul de faţă, însă calitatea ei este evaluată pe bazareacţiunilor vehiculului.
+ibraţiile verticale de înalte frecvenţe, asociate cu imperfecţiuni ale ciupercii şinei sau cusuduri de slabă calitate sunt modelate utilizând un vehicul şi un set de roţi conectate la cale prinintermediul unor resorturi.
Heacţiunile materialului rulant care generează frecvenţe joase sunt analizate folosindmodele simplificate, în care rigiditatea căii nu este luată în considerare. %aracteristicile rulării şiaspectele de stabilitate sunt ignorate în aceste analize.
tructura căii poate fi privită ca un sistem compus din şine, susţinute elastic de traversesituate la distanţe fiate, prin intermediul prinderilor. raversele sunt înglobate în prisma de
balast, cu rol de amortizare.

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 6/22
!ig. J #odelarea unui element de grindă 8cu acţiune dinamică9
%el mai simplu model dinamic constă într/o grindă pe mediu elastic, cu rigiditate şiamortizare uniform distribuite. #omentul de inerţie la rotaţie şi deformaţia din forţă tăietoare seneglijează. ncărcarea constă dintr/o forţă concentrată la <&, definită de-
( ) tieKt! ω⋅=
unde t)π=ω .%ondiţia de echilibru pe un element infinitezimal al grinzii se scrie-
dG* t
Gc
t
Gmd
2)
)
⋅+
∂∂⋅+
∂∂⋅=
∂∂
d
#d2 ⋅
∂∂
=⋅
e cunoaşte relaţia( )
7I
#
G)
)
−=∂∂
. 0stfel, rezultă ecuaţia-
( ) ( ) ( )( ) &t,G*
t
t,Gc
t
t,Gm
t,G7I
)
)
@
@
=⋅+∂
∂⋅+
∂
∂⋅+
∂
∂⋅ .
2efinim şi funcţia de fleibilitate ( )f (r -
( )1r
7IL
"f (
β= , unde
7I@
* @ =β .
e obţine ( )7IL
6&(
1
r = ,unde 6 $ lungimea caracteristică, @
*
7I@6 = ,* $ coeficient de
pat.
e defineşte lungimea caracteristică compleăβ
=λ "
. Pentru valori reduse ale
frecvenţei, se apropie de lungimea caracteristică 6. Pentru a afla lungimea de undă efectivă,
se înmulţeşte cu π) ⇒ βπ=λ ) . 6a ".' *(z, atinge o valoare de ".) m, aproimativ
egală cu dublul distanţei dintre ) traverse consecutive.
!rindă pe mediu elastic "i încărcare mo#ilă$
2e cele mai multe ori, încărcările dinamice se consideră staţionare. +iteza de rulare are,totuşi, o anumită influenţă asupra interacţiunii dinamice dintre materialul rulant şi cale. %el maiapropiat model de realitate este cel prezentat mai jos-
!ig. A #odel de grindă cu încărcare mobilă
%alculul este destul de comple. 7cuaţia de la care se porneşte este următoarea-( ) ( ) ( )
( ) &t,4* t
t,4c
t
t,4m
t,47I
)
)
@
@
=⋅+∂
∂⋅+
∂
∂⋅+
∂
∂⋅ .
ncărcarea variază conform funcţiei ( )tvK ⋅−δ⋅ .
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 7/22
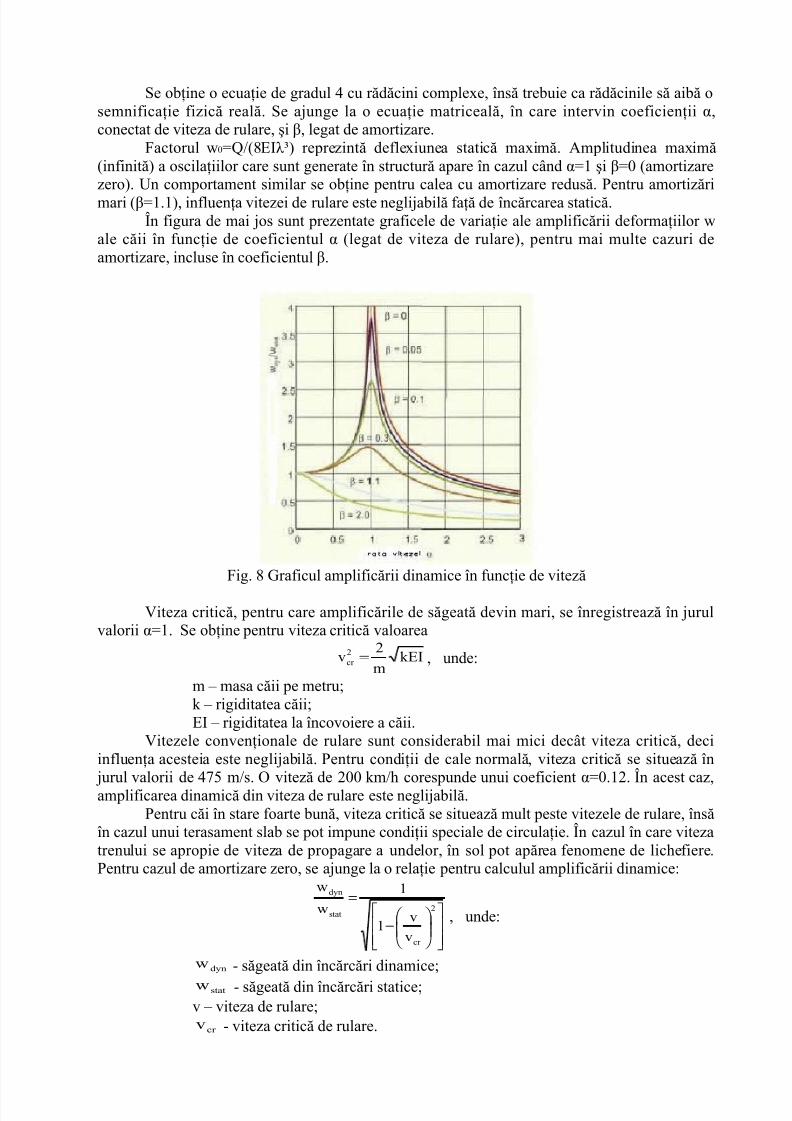
e obţine o ecuaţie de gradul @ cu rădăcini complee, însă trebuie ca rădăcinile să aibă osemnificaţie fizică reală. e ajunge la o ecuaţie matriceală, în care intervin coeficienţii M,conectat de viteza de rulare, şi N, legat de amortizare.
!actorul 4&<K?8L7IO9 reprezintă defleiunea statică maimă. 0mplitudinea maimă8infinită9 a oscilaţiilor care sunt generate în structură apare în cazul când M<" şi N<& 8amortizarezero9. Qn comportament similar se obţine pentru calea cu amortizare redusă. Pentru amortizărimari 8N<"."9, influenţa vitezei de rulare este neglijabilă faţă de încărcarea statică.
n figura de mai jos sunt prezentate graficele de variaţie ale amplificării deformaţiilor 4ale căii în funcţie de coeficientul M 8legat de viteza de rulare9, pentru mai multe cazuri deamortizare, incluse în coeficientul N.
!ig. L 5raficul amplificării dinamice în funcţie de viteză
+iteza critică, pentru care amplificările de săgeată devin mari, se înregistrează în jurulvalorii M<". e obţine pentru viteza critică valoarea
*7Im
)v)cr = , unde-
m $ masa căii pe metru>* $ rigiditatea căii>7I $ rigiditatea la încovoiere a căii.
+itezele convenţionale de rulare sunt considerabil mai mici decât viteza critică, deciinfluenţa acesteia este neglijabilă. Pentru condiţii de cale normală, viteza critică se situează în
jurul valorii de @A' m?s. : viteză de )&& *m?h corespunde unui coeficient M<&."). n acest caz,amplificarea dinamică din viteza de rulare este neglijabilă.
Pentru căi în stare foarte bună, viteza critică se situează mult peste vitezele de rulare, însăîn cazul unui terasament slab se pot impune condiţii speciale de circulaţie. n cazul în care vitezatrenului se apropie de viteza de propagare a undelor, în sol pot apărea fenomene de lichefiere.Pentru cazul de amortizare zero, se ajunge la o relaţie pentru calculul amplificării dinamice-
−
=)
cr
stat
dGn
v
v"
"
4
4
, unde-
dGn4 / săgeată din încărcări dinamice>
stat4 / săgeată din încărcări statice>v $ viteza de rulare>
cr v / viteza critică de rulare.

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 8/22
%. &ăspunsul roţilor la interacţiunea cu "inele
!orţele de interacţiune dintre materialul rulant şi cale se transmit prin intermediul zoneide contact dintre şinele de cale ferată şi roţile vehiculului. Helaţia dintre forţa de contact ! şideplasarea G pe verticală a zonei de contact se defineşte prin ecuaţia-
)1
( Gc! ⋅= , unde
(c )1m 3 −⋅ este o constantă de material.
Helaţia de contact dintre roată şi cale este modelată printr/un aşa/numit resort (ertz, cu oanumită constantă elastică (* . +aloarea liniarizată a rigidităţii acestui resort se obţine derivândepresia forţei de contact ! în raport cu deplasarea G-
1"1)(( !c
)
1
dG
d!* ⋅⋅==
Ren*ins determină valori ale constantei elastice (* în funcţie de raza roţii, atât pentruroţi noi cât şi pentru roţi uzate. 2e eemplu, pentru o roată cu diametrul de " m, se obţine
S
( "&@."* ⋅= m 3
pentru roţi noi şi
S
( "&J."* ⋅=
m 3
pentru roţi uzate.
!ig. S !orţa dinamică acţionând între roată şi cale
%ondiţia de echilibru pentru o roată conectată la şină printr/un resort (ertz se scrie-..
44( G#! ⋅+ < &, unde
tiT
4
ft)iT
44 eGeGG ω⋅π⋅
⋅=⋅=
Hezultă-
( ))
4(
T
44
#
"
!
Gf (
ω⋅==
n urma studiilor efectuate, s/a ajuns la concluzia că roata influenţează majoritar funcţiade transfer al interacţiunii pentru frecvenţe de până la '& (z. Pentru frecvenţe între '& şi "&&&(z, rolul de bază îl joacă şina, iar peste "&&& (z resortul (ertz. 0vând în vedere că deformaţiileapar predominant între "& şi "'&& (z, devine clar că modul de construire şi întreţinere a şinelorare o mare influenţă asupra interacţiunii roată/şină. 2iferenţe datorită variaţiei stării căii apar
pentru frecvenţe între J& şi )&& (z.
'. odelul ve(iculului liniar
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 9/22
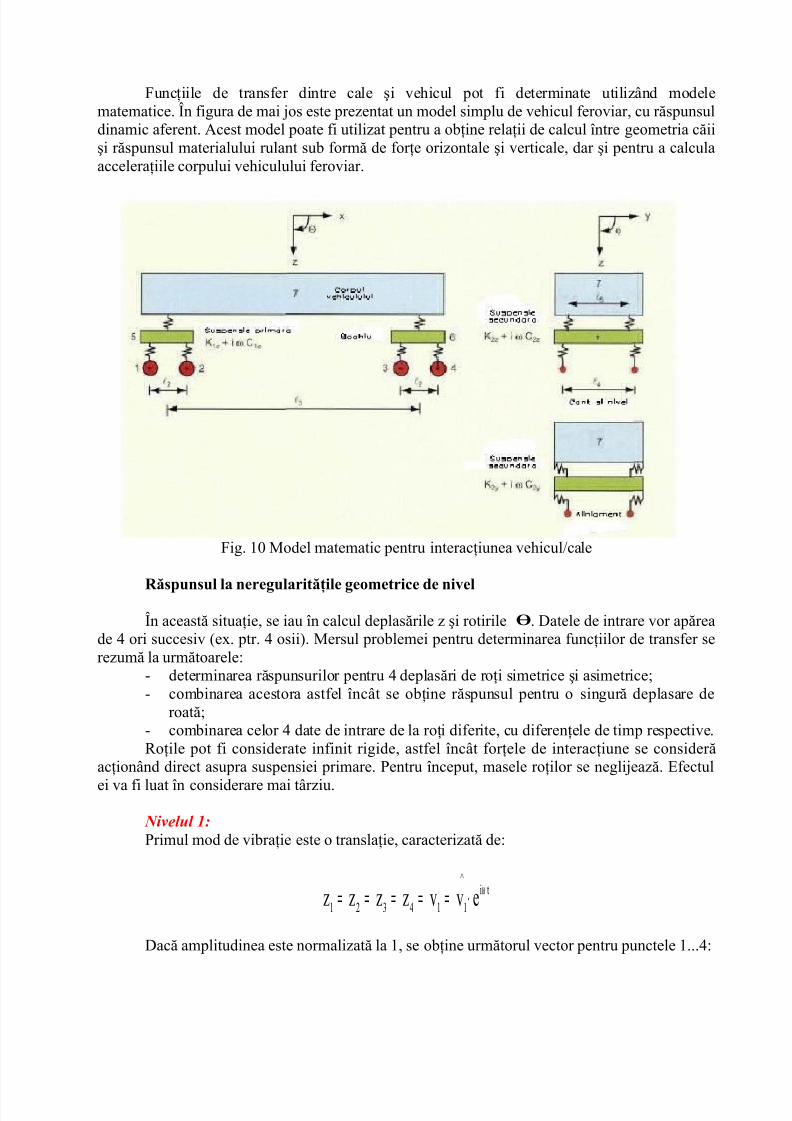
!uncţiile de transfer dintre cale şi vehicul pot fi determinate utilizând modelematematice. n figura de mai jos este prezentat un model simplu de vehicul feroviar, cu răspunsuldinamic aferent. 0cest model poate fi utilizat pentru a obţine relaţii de calcul între geometria căiişi răspunsul materialului rulant sub formă de forţe orizontale şi verticale, dar şi pentru a calculaacceleraţiile corpului vehiculului feroviar.
!ig. "& #odel matematic pentru interacţiunea vehicul?cale
&ăspunsul la nere)ularităţile )eometrice de nivel
n această situaţie, se iau în calcul deplasările z şi rotirile θ. 2atele de intrare vor apăreade @ ori succesiv 8e. ptr. @ osii9. #ersul problemei pentru determinarea funcţiilor de transfer serezumă la următoarele-
/ determinarea răspunsurilor pentru @ deplasări de roţi simetrice şi asimetrice>/ combinarea acestora astfel încât se obţine răspunsul pentru o singură deplasare de
roată>/ combinarea celor @ date de intrare de la roţi diferite, cu diferenţele de timp respective.Hoţile pot fi considerate infinit rigide, astfel încât forţele de interacţiune se consideră
acţionând direct asupra suspensiei primare. Pentru început, masele roţilor se neglijează. 7fectul
ei va fi luat în considerare mai târziu.
Nivelul 1:
Primul mod de vibraţie este o translaţie, caracterizată de-
tiT
""@1)" evvzzzz ω⋅=====
2acă amplitudinea este normalizată la ", se obţine următorul vector pentru punctele "...@-

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 10/22
=
"
"
"
"
v"
7cuaţiile mişcării pentru acest caz de încărcare pot fi descrise în domeniul frecvenţelorastfel-
)"'
)
' !)!@U# −=ω−
)A
)
A !@U# =ω−
( ) ( )'"z"z""
U+%iV ! −ω+=
( ) ( )A'z)z))
UU%iV ! −ω+=
7fectuând substituirile-
)
'#)
"a ω= / boghiu>
)
A#)
" b ω= / caroseria vehiculului feroviar>
z"z" %iV c ω+= / suspensia principală>
z)z) %iV d ω+= / suspensia secundară,
funcţia de transfer (Wij poate fi calculată între amplitudinea deplasării v " şi răspunsul, de
eemplu forţa !" şi deplasarea UA. 2eplasarea UA se transfomă apoi în acceleraţiaA
)..
A UU ω−= .
!uncţia de transfer (ij este definită după cum urmează-
=W
j"( forţa !" pentru "vT
j =
>
=W
j)( deplasarea UA a caroseriei vehiculului feroviar pentru "v
T
j =
>
W
j1( rotaţia XA pentru "v
T
j =
>
!uncţiile de transfer pentru primul mod de deplasare sunt-
−+−== bcd
)
"abc)
"acd
n
"+!(
&
""
W
""
cd)n
"+U(
&
"A
W
)" ==
&+( "A
W
1" =Θ= , unde-
bd)
"adab
)
" bccd)n& −−+−= .
Nivelul 2:
n acest caz, ambele boghiuri se deplasează asimetric, astfel-

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 11/22
tiT
))@1)" evvzzzz ω⋅==−=−==
+ectorul amplitudine devine-
−−
=
"
"
"
"
v)
%a un rezultat al mişcării asimetrice, vehiculul se roteşte, deplasarea z fiind egală cu &.7cuaţiile mişcării sunt după cum urmează-
)"'
)
' !)!@U# −=ω−
)1A
)
GA !l)R =Θω−
( ) ( )')z"z""
U+%iV !
−ω+=( )
Θ−ω+= A1'z)z)) Ul
)
"U%iV !
0vând)
GA)
1
" Rl
) b ω= , se determină funcţiile de transfer-
−+−== cd b
)
"cab
)
"acd
n
"+!(
""
"
)"
W
")
( )"
"
)'
W
)) bd)cn
"+U( −==
"1)A
W
1) nl
cd@
+( =Θ= , unde-
d b)
"adc bab
)
"cd)n """" −−−+= .
Nivelurile 3 şi 4:
n cazul 1, deplasările şi vectorul amplitudine se prezintă astfel-
tiT
11@1)" evvzzzz ω⋅==−==−= ,
−
−=
"
""
"
v1 .
Pentru cazul @, acestea sunt-
tiT
@@@1)" evvzzzz ω⋅===−=−= ,
−−
=
"
"
"
"
v@ .

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 12/22
n niciunul din aceste cazuri, caroseria nu este încărcată. uspensiile primare vibreazăindependent, simetric în cazul 1 şi asimetric în cazul @. 7cuaţiile de mişcare sunt următoarele-
")'
)
G' !l)R =Θω−
( )
Θ−ω+= ')1z"z"" l
)
"+%iV ! , unde-
)
G')
)
" Rl
)a ω= .
!uncţiile de transfer sunt-
c)a
ca+!(
"
"1"
W
"1 −−
==
c)a
ca+!(
"
"
@"
W
"@ −−
== .
Com#inarea reultatelor o#ţinute
Hăspunsul din mişcarea unei singure osii poate fi obţinut prin combinarea rezultatelor demai sus. 2e eemplu, prin însumarea tuturor rezultatelor, deplasările osiilor ",1 şi @ sunt nule, iarosia ) are deplasarea @. e deduce faptul că, dacă osia k înregistrează o mişcare forţată cuamplitudinea ", atunci răspunsul 8funcţia de transfer +
i* ( 9 se prezintă în următoarea formă-
∑=
+ ⋅⋅= @
" j
j*
W
iji* v(
@
"(
n această ecuaţie, j* v este al */lea element al vectorului amplitudine j
v . !uncţia detransfer ce rezultă, t
z în acest caz, precum şi componenta de răspuns aferentă, pot fi acumobţinute prin însumarea efectelor celor @ osii, ţinând cont de întârzierile corespunzătoare. 0cestlucru conduce la următoarele epresii-
t" U(K ⋅=
( ) t)
)
AA
..
c U(lUU ⋅=ω⋅Θ⋅−=
0ici, funcţiile de transfer "( şi )( au următoarele epresii-
∑=
ωτ+ ⋅+ω⋅⋅−=@
"*
i
* "
)
""* e(m
)
"(
( )∑=
ωτ++ ⋅⋅−⋅ω−=@
"*
i
* 1* )
)
)* e(l(( ,
unde-&
" =τ / osia referinţă>
vl))
=τ >vl
11 =τ >
v
ll1)
@
+=τ >
.l / distanţa dintre centrul de greutate al vehiculului pe aa şi punctul de răspuns>
v / viteza de rulare.

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 13/22
Primul termen din relaţia de calcul pentru "( reprezintă proporţia masei osiilor în
cuantumul forţei K.
&ăspunsul la nere)ularităţile )eometrice ale aliniamentelor
0cest tip de neregularităţi determină un răspuns dinamic foarte asemănător cu cel generatde neregularităţile anterioare. !uncţia de transfer "
( , dată de relaţia de mai jos, eprimă relaţiadintre forţa verticală Y şi aliniament, în timp ce funcţia )( reprezintă relaţia dintre acceleraţiaorizontală a vehiculului şi aliniament.
∑=
τ⋅ω+ ⋅+ω⋅−=@
"*
i
* "
)
""* e(m
)
"( >
{ }∑=
τ⋅ω++ ⋅⋅−⋅ω−=@
"*
i
* 1* )
)
)* e(l(( .
&ăspunsul la nere)ularităţile privind supraînălţarea căii
n cazul solicitărilor datorate supraînălţării căii, apar doar rotaţii E. 2acă în cazulneregularităţilor din aliniamente se neglijează rotaţiile E, în cazul de faţă nu se iau în considerarereacţiunile laterale 8modelate ca resorturi9. %alculul relaţiilor dintre supraînălţare şi reacţiuneavehiculului este similară celui din cazul neregularităţilor de nivel. electăm aceleaşi @ moduri dedeplasare forţate şi studiem răspunsul fiecărei osii în urma aplicării gradului de libertate E.
Nivelul 1:
Primul mod de vibraţie este caracterizat de-
tiT
""@1)" evv ω⋅==φ=φ=φ=φ
!orţele de interacţiune pentru fiecare osie sunt egale, datorită simetriei. !orţele dereacţiune în cazul şinei stângi şi a celei drepte sunt opuse. 7cuaţiile de mişcare pentru acestsistem sunt-
)'"@'
)
' !l!l)R ⋅−⋅⋅=φ⋅ω⋅−
)'A
)
A !l)R ⋅⋅=φ⋅ω⋅−
( )
⋅φ−ω+= @'"z"z"" l
)
"+%iV !
( )( ) 'A'z)z)) l)"%iV ! ⋅φ−φω+= ,
unde-)
'Ra ω⋅= / boghiul>
)
AR b ω⋅= / caroseria vehiculului feroviar>
( ) )
'z"z" l%iV c ⋅ω+= / suspensia principală>
( ) )
@z)z) l%iV d ⋅ω+= / suspensia secundară>
bd)
"Gadab
)
" bccd)n ⋅−−+−= .
!uncţiile de transfer pentru acest caz de încărcare sunt-
−+−⋅⋅== bcd
)
"abc)
"acd
n
"
l
"+!(
'
""
W
""

8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 14/22
cd)n
"+( "A
W
)" ⋅=φ=
Nivelul 2:
Pentru acest nivel, modul de vibraţie este caracterizat astfel-
ti
T
))@1)" evv ω⋅==φ−=φ−=φ=φ
n acest caz, vehiculul nu efectuează mişcare de rotaţie. oluţia reiese din nivelul ", pentru cazul &
A =φ . !uncţiile de transfer sunt-
( )
adc)
adc
l
"+!(
'
)"
W
") −+−
⋅==
&+()A
W
)) =φ=
Nivelurile 3 şi 4:
n acest cazuri, avem-
tiT
11@1)" evv
ω⋅==φ−=φ=φ−=φ ,
respectiv
tiT
@@@1)" evv
ω⋅==φ=φ−=φ−=φ
0tât caroseria vehiculului, cât şi boghiul nu se mişcă. n consecinţă, funcţiile de transfersunt-
'
1"
W
"1lc+!( == ,
respectiv
'
@"
W
"@l
c+!( == .
Com#inarea reultatelor o#ţinute
olicitarea din supraînălţare generează două componente de reacţiune, "! şi Aφ . e
obţin derivatele-
Az
)..
b lY φ⋅⋅ω=
AG
)..
b lU φ⋅⋅ω−=
0ici, Gl şi z
l reprezintă distanţele dintre centrul de greutate al vehiculului şi punctul derăspuns, pe direcţiile G, respectiv z.
Hăspunsul din supraînălţare se prezintă astfel-tr l
@1'."UUU φ−=−=∆otodată, avem-
U(Y)
..
b ∆⋅=
U(U1
..
b ∆⋅= ,
unde-
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 15/22
∑=
ωτ+ ⋅⋅ω⋅−=@
"*
i
* )z
)
)* e(l
@1'."
"( >
∑=
ωτ+ ⋅⋅ω⋅−=@
"*
i
* )G
)
1* e(l
@1'."
"( .
+.+ ,stimarea funcţiilor de transfer utili-nd măsurarea datelor
Introducere
Interacţiunea dintre vehicul şi cale poate fi descrisă prin funcţii de transfer. 0cesteaindică, de eemplu, cum o anumită componentă a reacţiunii vehiculului variază în funcţie decomponente ale geometriei căii. #odelul matematic studiat s/a bazat pe o schematizareconţinând mase, resorturi şi amortizoare.
#etoda descrisă în continuare utilizează ca şi date de intrare semnale geometricemăsurate, urmând a se determina reacţiunea vehiculului şi a se stabili funcţiile de transfer cuajutorul metodei I#I 8Intrări #ultiple Ieşire ingulară9.
e studiază mai multe eemple, urmărind estimarea funcţiilor de transfer utilizând datemăsurate, cu accent pe veridicitatea rezultatelor.
Principii de #aă pentru 1 intrare "i 1 ie"ire
eoria analizei semnalelor aleatoare face distincţia între domeniul de timp pentru procesedinamice 8sau domeniul spaţial pentru procese geometrice9 şi domeniul frecvenţelor. !recvenţaeste compusă din timpul reciproc sau distanţa reciprocă pentru procese dinamice, respectivgeometrice. 2eşi în continuare se va folosi variabila temporală t, aceasta poate fi înlocuită cudistanţa sau s. imilar, frecvenţa f poate reprezenta atât timpul reciproc, cât şi distanţa
reciprocă. 2e fapt, variabilele timp şi distanţă sunt interconectate prin viteza de rulare.2acă semnalul 8t9 reprezintă domeniul timpului, atunci reprezentarea în domeniulfrecvenţelor este obţinută prin transformare !ourier. Zinând cont că ∫
∞
∞− <dt9t8. , şi implicit
∫ ∞
∞− <df 9f 8[ , atunci transformările din şi în domeniul de timp sunt-
∫ ∞
∞−
π⋅−⋅= dte9t8.9f 8[ ft)i
∫ ∞
∞−
π⋅−⋅= df e9f 8[9t8. ft)i
2acă aceste transformări sunt efectuate digital, se utilizează ransformarea !ourierHapidă 8!!9.
2acă modelul \" intrare / " ieşire] din figura este compus dintr/un sistem liniar realizabil
fizic, funcţia de transfer (8f9 poate fi determinată pe baza parametrilor sistemului. 2acă notămintrarea cu 8t9, atunci prin funcţia corespunzătoare [8f9 se poate calcula valoarea funcţiei deieşire Y8f9, astfel-
9f 8[9f 8(9f 8Y ⋅=
2acă atât valoarea de intrare, cât şi cea de ieşire sunt măsurate, funcţia de transfer nu esteegală cu raportul lor-
9f 8[
9f 8Y9f 8( ≠
0tât partea reală, cât şi cea imaginară a transformatei !ourier au în general forme
neregulate. 0stfel, este necesar a se utiliza funcţii de densitate spectrală de gradul @, cu un gradde veridicitate statistic acceptabil. 0stfel, se poate face o estimare a funcţiei (8f9.Helaţia dintre datele de intrare şi cele de ieşire este descrisă în domeniul temporal de
convoluţia funcţiilor h şi , după cum urmează-
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 16/22
( ) ( )∫ ∞
∞− ττ−⋅τ= dt.h9t8G / convoluţie
9f 8[9f 8(9f 8Y ⋅= / multiplicare
n aceste epresii, ( )τh reprezintă răspunsul impuls unitate, iar 9f 8( funcţia detransfer-
∫
∞
∞−
π⋅−
⋅τ= de98h9f 8( ft)i
∫ ∞
∞−
π⋅−⋅=τ df e9f 8(98h ft)i
2in transformările !ourier, ....
+. plicaţii ale modelelor dinamice avansate
• Interacţiunea dintre "ina de cale ferată "i materialul rulant în mi"care la vitee mari
: metodă numerică a fost propusă pentru calculul căii în plan vertical sub acţiuneavehiculelor feroviare în mişcare. 0ceasta a condus la dezvoltarea unei metode de calcul numite20H 82Gnamic 0nalGsis of Hail4aG rac* tructures < 0naliza 2inamică a tructurilor de%ale !erată9. #etoda a fost aplicată pentru evaluarea acceleraţiilor vehiculului, deplasărilor căiişi a forţelor generate de trecerea unui tren de mare viteză halGs, atât pe cale convenţională cât şi
pe şină prinsă continuu. 2in rezultatele obţinute s/au desprins concluzii referitoare la performanţa căii sub circulaţie cu viteze mari.
Introducere
%alea poate fi caracterizată printr/o funcţie de transfer, care să eprime relaţia dintre forţatransmisă de vehicul şi reacţiune, ţinând cont de frecvenţă. /a dezvoltat o metodă pentrudeterminarea caracteristicilor căii, cu privire la masa distribuită, rigiditate şi amortizare, utilizândfuncţiile de transfer calculată şi măsurată. %apacitatea căii de a reduce zgomotul şi vibraţiile se
poate eprima printr/o distanţă de amortizare dependentă de frecvenţă.7lementele luate în calcul sunt- un tren halGs deplasându/se cu viteze diferite, atât pe o
cale convenţională cât şi pe o cale prinsă continuu 87H9. ncărcările vehicul $ cale se introduc
prin neregularităţi verticale sinusoidale şină?cale. 0u fost studiate diferite lungimi de undă pentrua evalua impactul lor asupra reacţiunilor. %ele 1 elemente studiate ale răspunsului căii au fost-acceleraţiile vehiculului 8cu efect asupra confortului călătorilor9, defleiunile căii şi forţele decontact vehicul $ cale.
odelul structural
#odelul structural constă în ) componente- trenul în mişcare şi calea, modelate separat.Pe durata analizei dinamice, constând într/o procedură de integrare numerică, interacţiuneadintre cele ) componente ale modelului se ia în considerare.
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 17/22
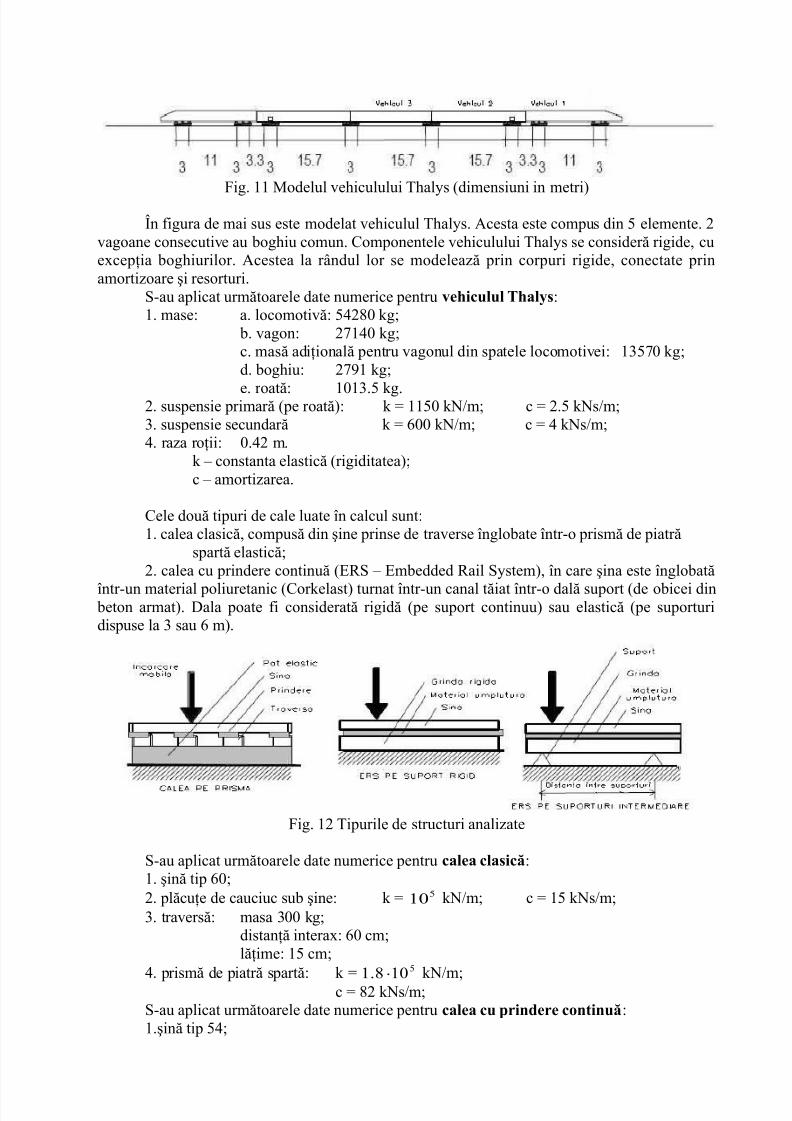
!ig. "" #odelul vehiculului halGs 8dimensiuni in metri9
n figura de mai sus este modelat vehiculul halGs. 0cesta este compus din ' elemente. )vagoane consecutive au boghiu comun. %omponentele vehiculului halGs se consideră rigide, cuecepţia boghiurilor. 0cestea la rândul lor se modelează prin corpuri rigide, conectate prinamortizoare şi resorturi.
/au aplicat următoarele date numerice pentru ve(iculul /(al0s-". mase- a. locomotivă- '@)L& *g>
b. vagon- )A"@& *g>c. masă adiţională pentru vagonul din spatele locomotivei- "1'A& *g>d. boghiu- )AS" *g>
e. roată- "&"1.' *g.). suspensie primară 8pe roată9- * < ""'& *3?m> c < ).' *3s?m>1. suspensie secundară * < J&& *3?m> c < @ *3s?m>@. raza roţii- &.@) m.
* $ constanta elastică 8rigiditatea9>c $ amortizarea.
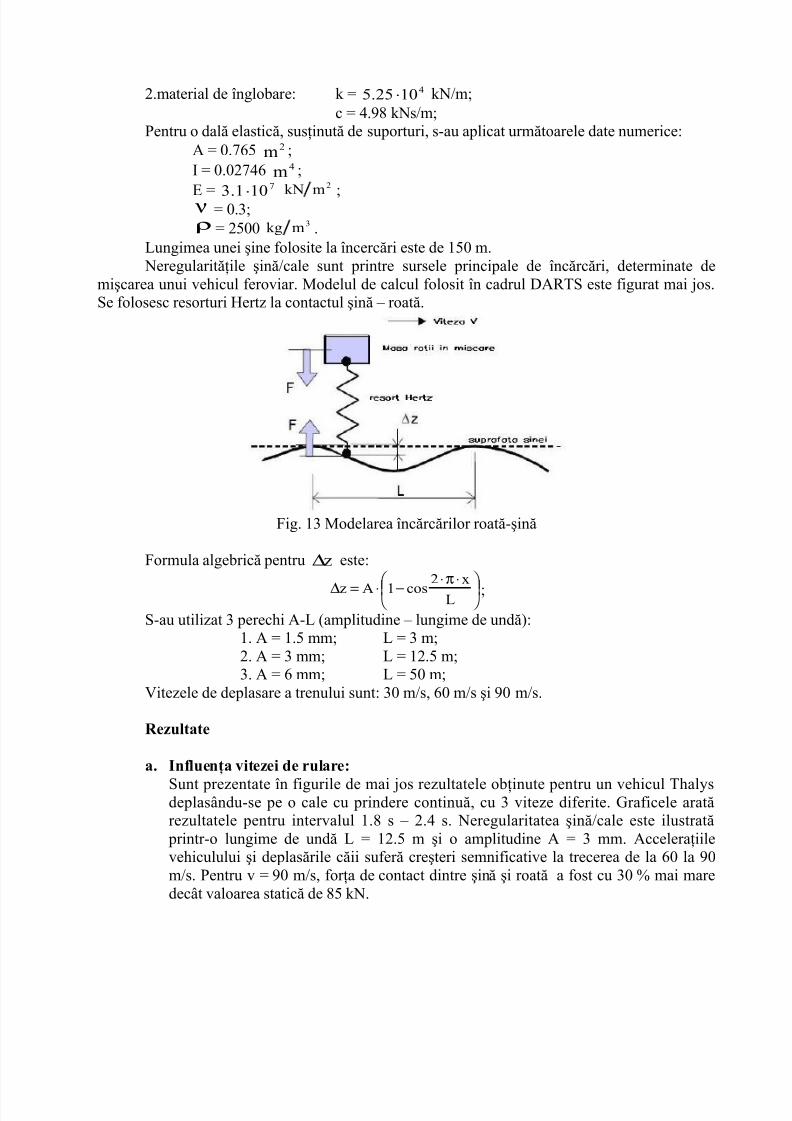
%ele două tipuri de cale luate în calcul sunt-". calea clasică, compusă din şine prinse de traverse înglobate într/o prismă de piatră
spartă elastică>). calea cu prindere continuă 87H $ 7mbedded Hail Gstem9, în care şina este înglobată
într/un material poliuretanic 8%or*elast9 turnat într/un canal tăiat într/o dală suport 8de obicei din beton armat9. 2ala poate fi considerată rigidă 8pe suport continuu9 sau elastică 8pe suporturidispuse la 1 sau J m9.
!ig. ") ipurile de structuri analizate
/au aplicat următoarele date numerice pentru calea clasică-". şină tip J&>). plăcuţe de cauciuc sub şine- * < '"& *3?m> c < "' *3s?m>1. traversă- masa 1&& *g>
distanţă intera- J& cm>lăţime- "' cm>
@. prismă de piatră spartă- * < '"&L." ⋅ *3?m>c < L) *3s?m>
/au aplicat următoarele date numerice pentru calea cu prindere continuă-".şină tip '@>
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 18/22
).material de înglobare- * < @"&)'.' ⋅ *3?m>c < @.SL *3s?m>
Pentru o dală elastică, susţinută de suporturi, s/au aplicat următoarele date numerice-0 < &.AJ' )m >I < &.&)A@J @m >
7 <A
"&".1 ⋅
)
m*3 > ν < &.1>ρ < )'&& 1m*g .
6ungimea unei şine folosite la încercări este de "'& m. 3eregularităţile şină?cale sunt printre sursele principale de încărcări, determinate de
mişcarea unui vehicul feroviar. #odelul de calcul folosit în cadrul 20H este figurat mai jos.e folosesc resorturi (ertz la contactul şină $ roată.
!ig. "1 #odelarea încărcărilor roată/şină
!ormula algebrică pentru z∆ este-
⋅π⋅
−⋅=∆ 6
)cos"0z >
/au utilizat 1 perechi 0/6 8amplitudine $ lungime de undă9-". 0 < ".' mm> 6 < 1 m>). 0 < 1 mm> 6 < ").' m>1. 0 < J mm> 6 < '& m>
+itezele de deplasare a trenului sunt- 1& m?s, J& m?s şi S& m?s.
&eultate
a. Influenţa viteei de rulare$
unt prezentate în figurile de mai jos rezultatele obţinute pentru un vehicul halGsdeplasându/se pe o cale cu prindere continuă, cu 1 viteze diferite. 5raficele aratărezultatele pentru intervalul ".L s $ ).@ s. 3eregularitatea şină?cale este ilustrată
printr/o lungime de undă 6 < ").' m şi o amplitudine 0 < 1 mm. 0cceleraţiilevehiculului şi deplasările căii suferă creşteri semnificative la trecerea de la J& la S&m?s. Pentru v < S& m?s, forţa de contact dintre şină şi roată a fost cu 1& ^ mai maredecât valoarea statică de L' *3.
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 19/22
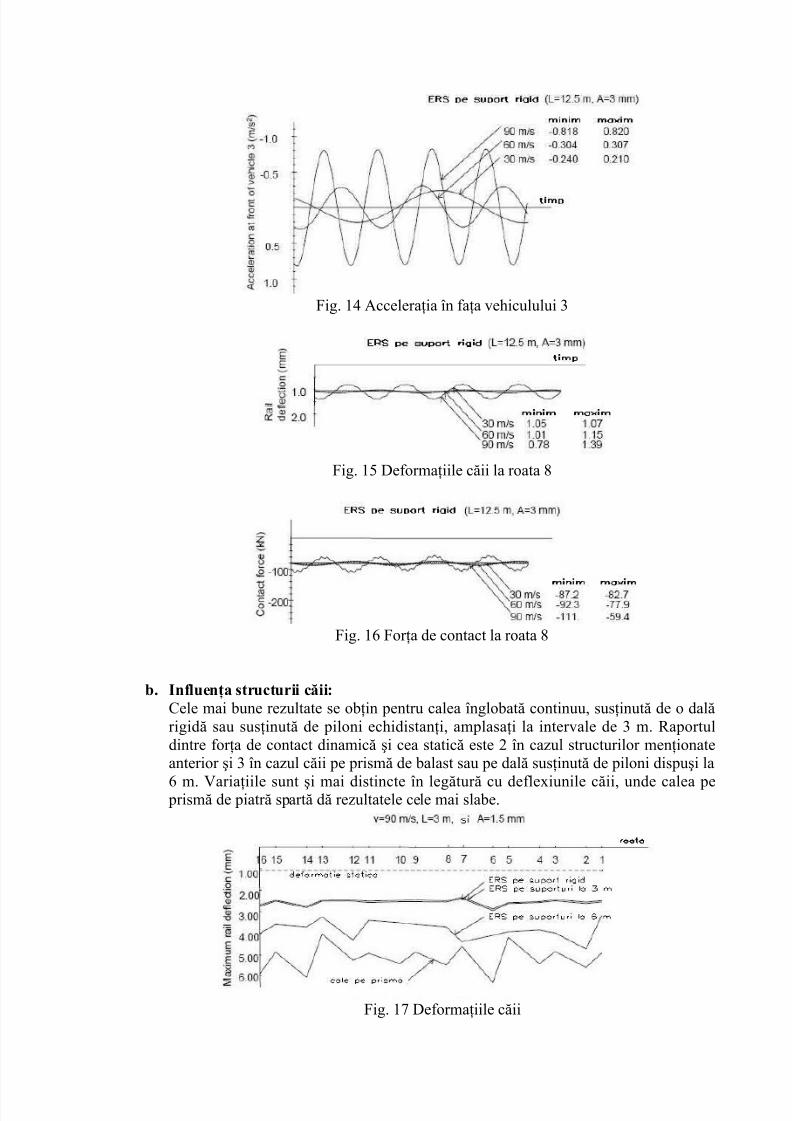
!ig. "@ 0cceleraţia în faţa vehiculului 1
!ig. "' 2eformaţiile căii la roata L
!ig. "J !orţa de contact la roata L
#. Influenţa structurii căii$%ele mai bune rezultate se obţin pentru calea înglobată continuu, susţinută de o dalărigidă sau susţinută de piloni echidistanţi, amplasaţi la intervale de 1 m. Haportuldintre forţa de contact dinamică şi cea statică este ) în cazul structurilor menţionateanterior şi 1 în cazul căii pe prismă de balast sau pe dală susţinută de piloni dispuşi la
J m. +ariaţiile sunt şi mai distincte în legătură cu defleiunile căii, unde calea pe prismă de piatră spartă dă rezultatele cele mai slabe.
!ig. "A 2eformaţiile căii
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 20/22
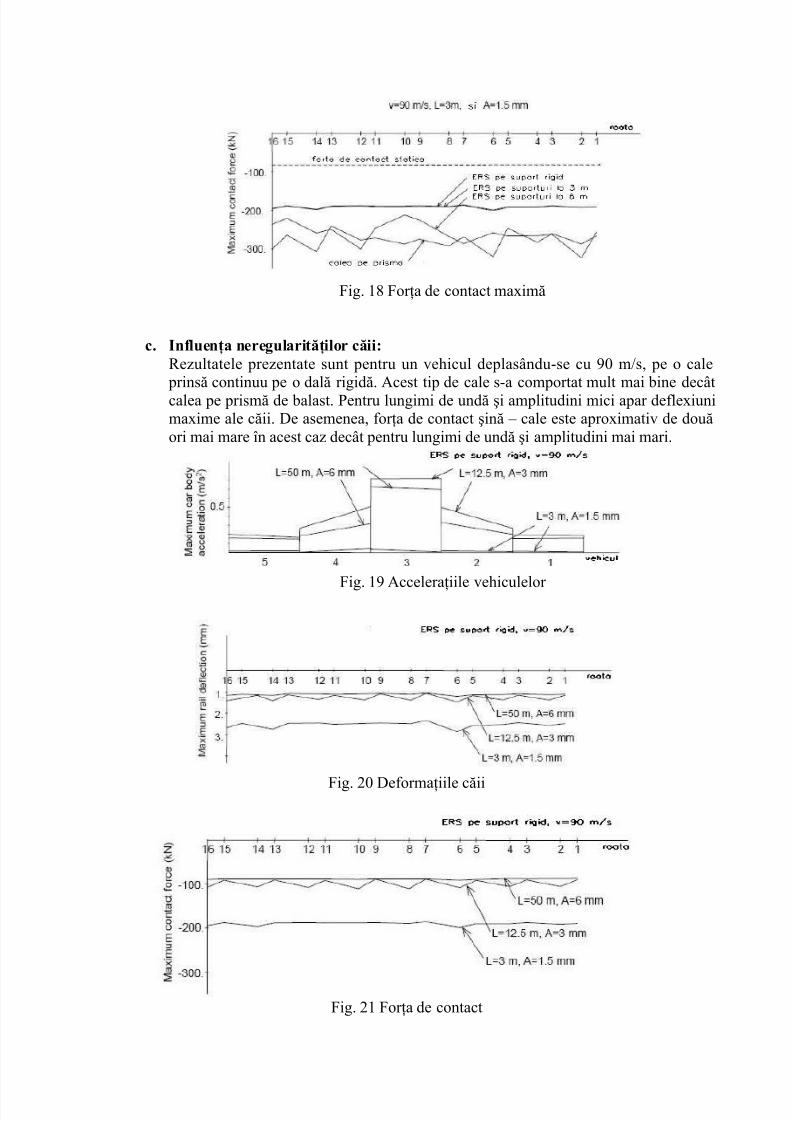
!ig. "L !orţa de contact maimă
c. Influenţa nere)ularităţilor căii$Hezultatele prezentate sunt pentru un vehicul deplasându/se cu S& m?s, pe o cale
prinsă continuu pe o dală rigidă. 0cest tip de cale s/a comportat mult mai bine decâtcalea pe prismă de balast. Pentru lungimi de undă şi amplitudini mici apar defleiunimaime ale căii. 2e asemenea, forţa de contact şină $ cale este aproimativ de douăori mai mare în acest caz decât pentru lungimi de undă şi amplitudini mai mari.
!ig. "S 0cceleraţiile vehiculelor
!ig. )& 2eformaţiile căii
!ig. )" !orţa de contact
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 21/22
Concluii$
%reşterea vitezei de rulare conduce la creşterea acceleraţiilor vehiculului. otodată,acestea din urmă sunt influenţate mai puternic de lungimile de undă mari ale neregularităţilorcăii decât cele mici. n schimb, neregularităţile de cale cu lungime de undă redusă conduc ladefleiuni ale căii şi forţe de contact considerabil mai mari.
%alea cu prindere continuă se comportă mai bine decât calea clasică, pe prismă de piatrăspartă, în ceea ce priveşte forţele de contact şi defleiunile căii.
20H oferă numeroase noi posibilităţi de studiu a performanţelor căii sub acţiuneavehiculelor în mişcare, atât la viteze convenţionale cât şi la viteze mari.
• Problemele analizate până acum s/au aat în jurul modelului de calcul pentru sisteme cu" 526. 0cestea au avantajul că pot fi utilizate relativ uşor în lipsa unui program de calculautomat. 2ezavantajul constă în faptul că structurile devin uneori mult prea simplificate şi estedificil a interpreta corect rezultatele obţinute.
Qtilizarea la maim a unui aparat de calcul computerizat permite crearea de modele 12
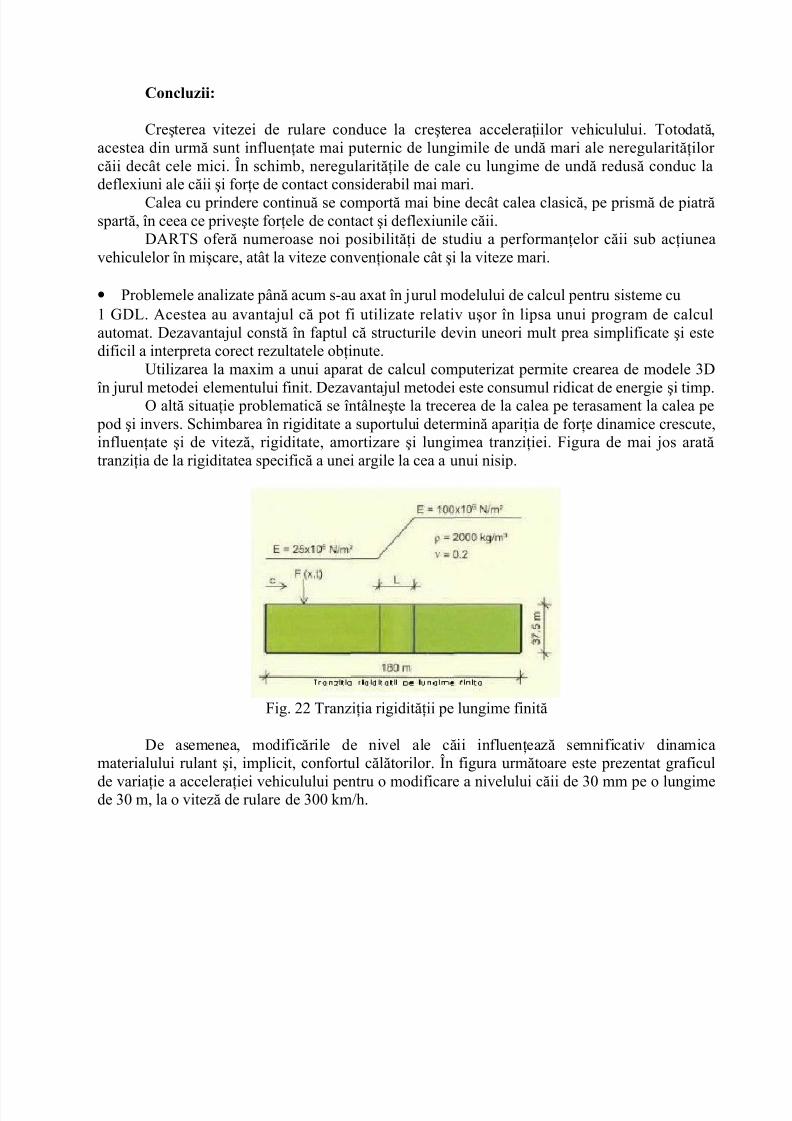
în jurul metodei elementului finit. 2ezavantajul metodei este consumul ridicat de energie şi timp.: altă situaţie problematică se întâlneşte la trecerea de la calea pe terasament la calea pe pod şi invers. chimbarea în rigiditate a suportului determină apariţia de forţe dinamice crescute,influenţate şi de viteză, rigiditate, amortizare şi lungimea tranziţiei. !igura de mai jos aratătranziţia de la rigiditatea specifică a unei argile la cea a unui nisip.
!ig. )) ranziţia rigidităţii pe lungime finită
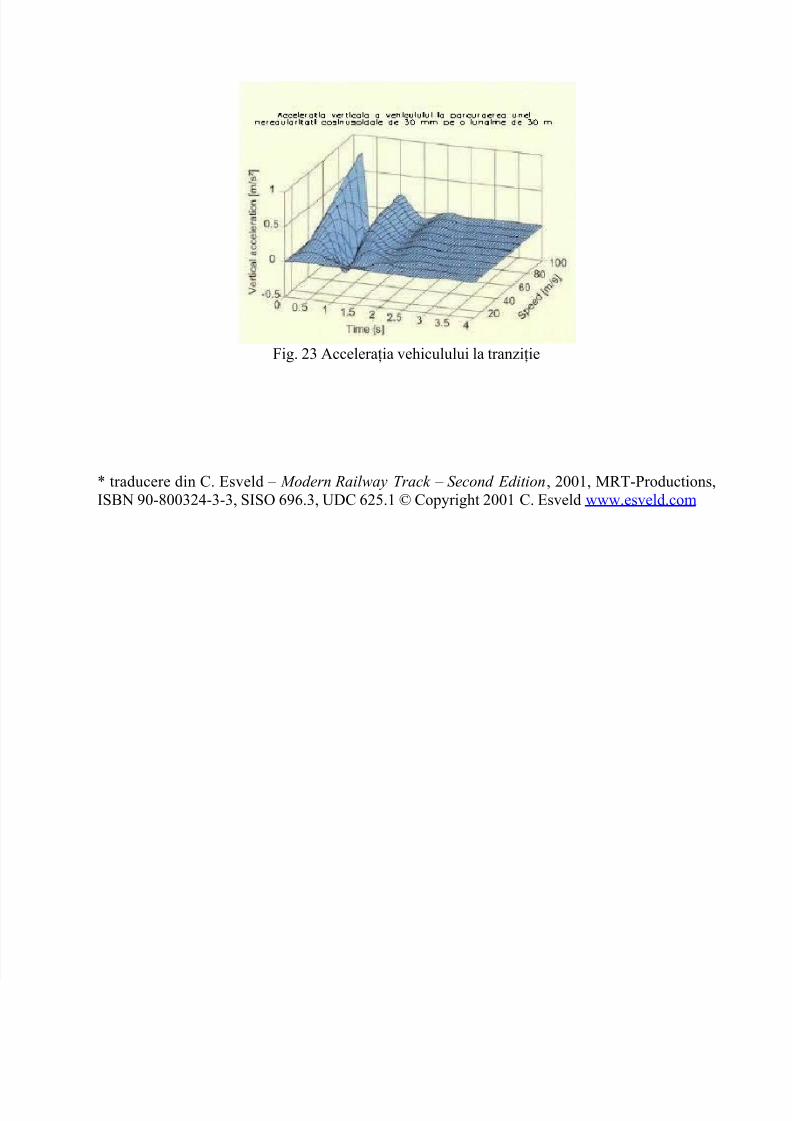
2e asemenea, modificările de nivel ale căii influenţează semnificativ dinamicamaterialului rulant şi, implicit, confortul călătorilor. n figura următoare este prezentat graficul
de variaţie a acceleraţiei vehiculului pentru o modificare a nivelului căii de 1& mm pe o lungimede 1& m, la o viteză de rulare de 1&& *m?h.
8/12/2019 calcul dinamic la CF
http://slidepdf.com/reader/full/calcul-dinamic-la-cf 22/22
!ig. )1 0cceleraţia vehiculului la tranziţie
W traducere din %. 7sveld $ Modern Railway Track – Second Edition, )&&", #H/Productions,I_3 S&/L&&1)@/1/1, I: JSJ.1, Q2% J)'." ` %opGright )&&" %. 7sveld 444.esveld.com
Related Documents