1 ISE 311 - 24 Ch. 26: Predetermined Time Systems Frank and Lillian Gilbreth broke work into therbligs (elements). The next step is to assign time values to the elements. Times for elements are added to obtain a total time. Independence and additivity are assumed. PTS are based on the concept that there are basic, universal units of work with standard amounts of time.

1 ISE 311 - 24 Ch. 26: Predetermined Time Systems Frank and Lillian Gilbreth broke work into therbligs (elements). The next step is to assign time values.
Dec 17, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1ISE 311 - 24
Ch. 26: Predetermined Time Systems
Frank and Lillian Gilbreth broke work into therbligs (elements).
The next step is to assign time values to the elements.
Times for elements are added to obtain a total time. Independence and additivity are assumed.
PTS are based on the concept that there are basic, universal units of work with standard amounts of time.

2ISE 311 - 24
Therbligs
The smallest unit of activity in a task.
“Gilbreth” backward (sort of)
from: http://gilbrethnetwork.tripod.com/therbligs.html#Chart
3ISE 311 - 24
Methods-Time Measurements (MTM)
Developed in 1946 Simplified versions are available. A training course is required for using the
system correctly.
4ISE 311 - 24
MTM-1 10 categories of movements Times in TMUs (1 TMU = .000 010 h) Times are for an experienced worker working at
a normal pace. No allowances are included in the times.
5ISE 311 - 24
Reach (table 26.1, pg. 503)
Reach to an object in a fixed location or in the other hand.
Reach to a single object whose general location is known.
Reach to an object jumbled with others in a group.
Reach to a very small object or where accurate grasp is required.
Reach to an indefinite location.
6ISE 311 - 24
Move (table 26.2, pg. 504)
Move object to the other hand or against stop. Move object to an approximate or indefinite
location. Move object to an exact location.
7ISE 311 - 24
Turn (table 26.4, pg. 506)
A movement that rotates the hand, wrist, and forearm about the long axis of the forearm.
Time depends on degrees of turn, weight of the object, and resistance against turn.
Apply Pressure (table 26.5, pg. 506)
Application of force without resultant movement.
8ISE 311 - 24
Grasp (table 29.6, pg. 567)
Pickup grasp Regrasp Transfer grasp Jumbled grasp Contact, sliding, or hook grasp
9ISE 311 - 24
Position (table 26.7, pg. 508)
Aligning, orienting, or engaging one object with another
Position times vary with: Amount of pressure needed to fit Symmetry of the object Ease of handling
10ISE 311 - 24
Disengage (table 26.8, pg. 509)
Breaking contact between one object and another
Times vary with: Class of fit Ease of handling Care in handling
11ISE 311 - 24
Release (table 26.9, pg. 509)
Relinquishing control of an object by the hand or fingers
Two types: Simple opening of the fingers Contact release
12ISE 311 - 24
Other Motions
Body, leg, and foot motions Eye motions Combined motions Limited motions
13ISE 311 - 24
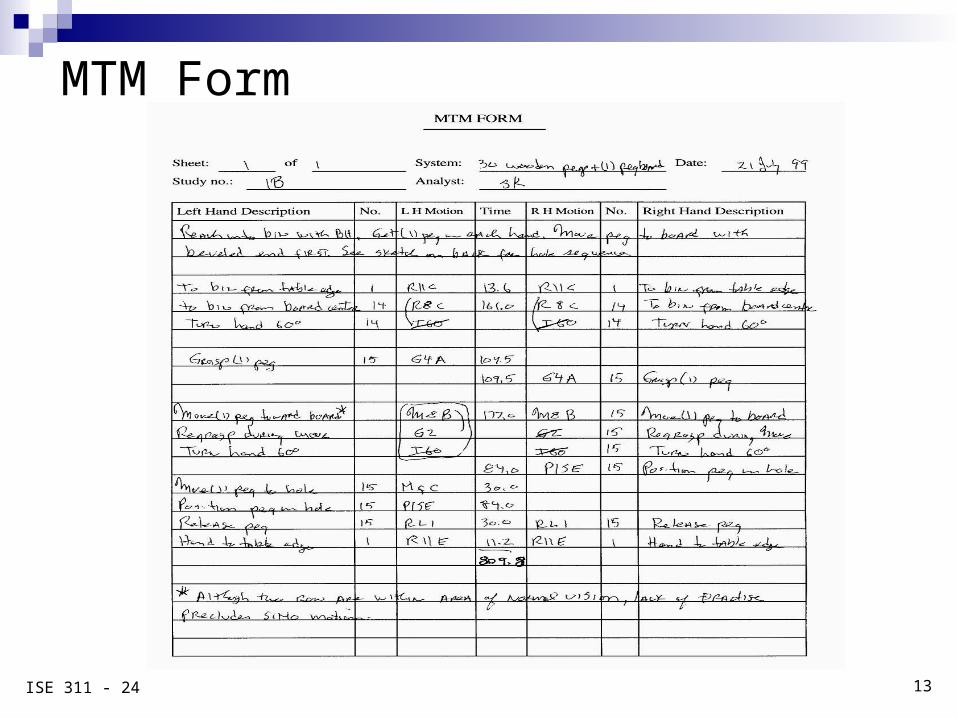
MTM Form
14ISE 311 - 24
MTM-2
Takes about 40% of the time of MTM-1 to analyze a task.
Has only 37 times in all. Key categories are GET and PUT. Provides decision trees to determine case. User estimates distance and uses time from
table. Includes 7 other motions.
15ISE 311 - 24
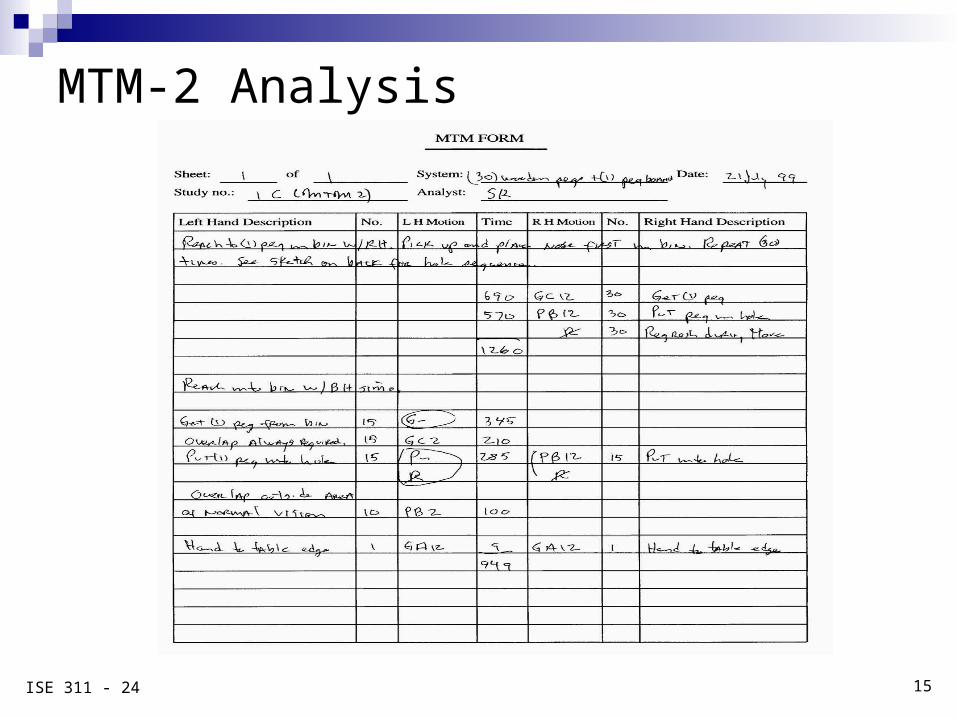
MTM-2 Analysis
16ISE 311 - 24
MTM-3
Takes about 15% of the time of MTM-1 to analyze a task.
Has only 10 times. Key categories are HANDLE and TRANSPORT. Provides decision trees to determine case. User estimates distance (< 6 in. or > 6 in.) and
uses time from table. Includes 2 other motions.
17ISE 311 - 24
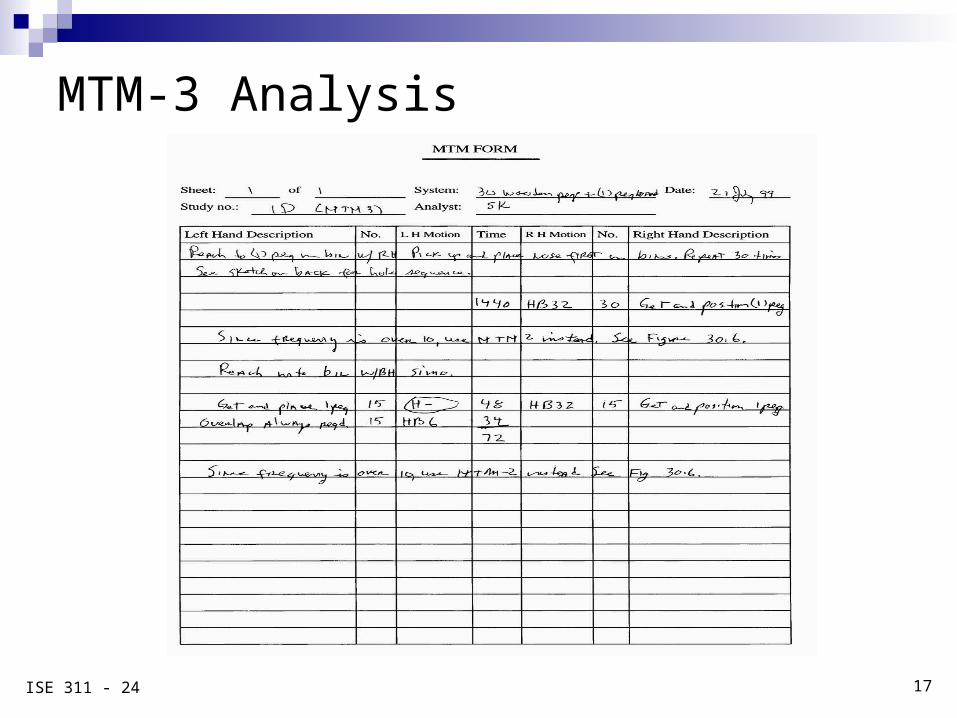
MTM-3 Analysis
18ISE 311 - 24
MOST Work Measurement System
Based on observation that the majority of activities are associated with a limited number of motion sequences.
Significantly reduces time required to perform an analysis.
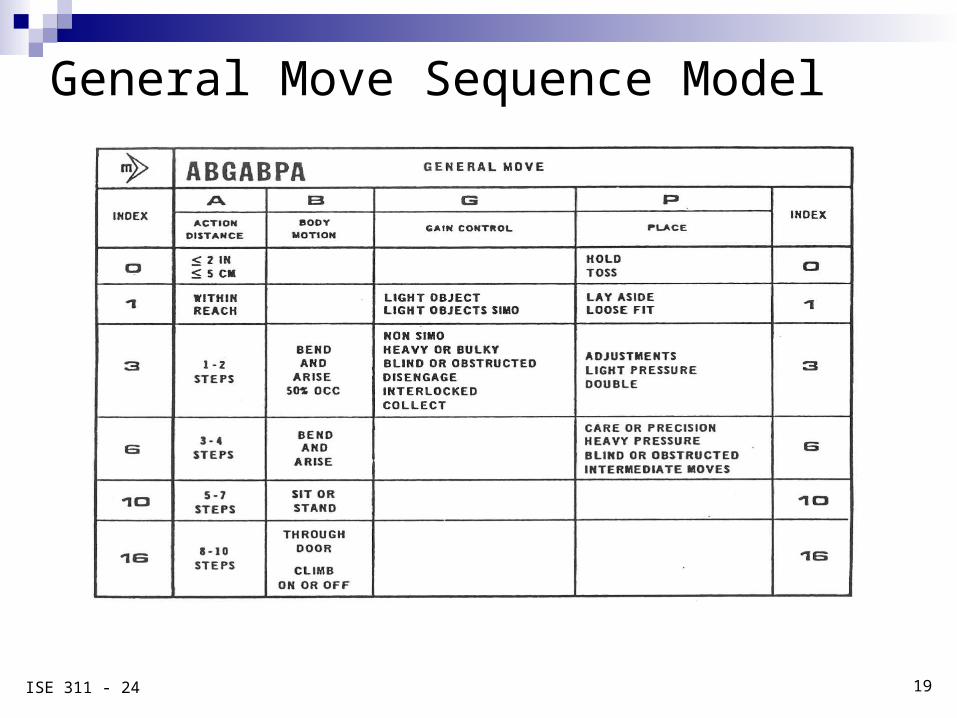
4 sequence models (pp. 513 – 516) General move sequence [A B G A B P A] Controlled move sequence [A B G M X I A] Tool use sequence [A B G A B P use* A B P A] Manual crane sequence [A B G M X I A, specific to
crane use.]
19ISE 311 - 24
General Move Sequence Model

20ISE 311 - 24
Your turn …
Perform a MOST analysis of the peg board task.
Perform a MOST analysis of writing “MOST” on your notes with a pencil (assume the pencil is picked up from the desk at the beginning and returned to the desk at the end of the task.)

21ISE 311 - 24
MODAPTS
Based on the concept that the body member used is the key variable.
All body movements are multiples of a MOD (1 MOD = .129 s).
22ISE 311 - 24
Comments about PTS
In theory, PTS can accurately predict task times. Evidence shows reality and theory don’t agree.
One problem is that analyst judgment is required. For the most part, consistency and cost are
more important than accuracy. a consistent deviation from reality can be adjusted for
Purpose of a PTS study use methods analysis to determine an efficient work
method determine the amount of time necessary to do the job
Related Documents











